福特大马力混动用的ECVT变速箱是如何实现低转速高扭矩的?
福特就是丰田THS
友情提示:本文 THS原理科普,虽然有简单数学四则运算,但对文科生阅读友好,确保看得懂。
福特就是丰田THS[1]。福特内部工程师自己说的,两个公司eCVT专利交叉互授。
“The HF35 was one of the great successes,” he said proudly. It was based on the Aisin AW PowerSplit architecture (itself inspired by early-1970s TRW technology) enabled by an agreement between Ford and Toyota that allowed Ford to use the powerflow of the first-generation Aisin AW models HD-10 and HD-20 for their own product. According to Renneker, the powerflow of the Aisin and Ford HF35 “are nearly identical, as are the motors and Denso inverter architecture.”
实际看连接方式也都一样。中间行星架连接发动机,太阳轮连接MG1发电机,最外部的齿圈输出动力到前车轮。
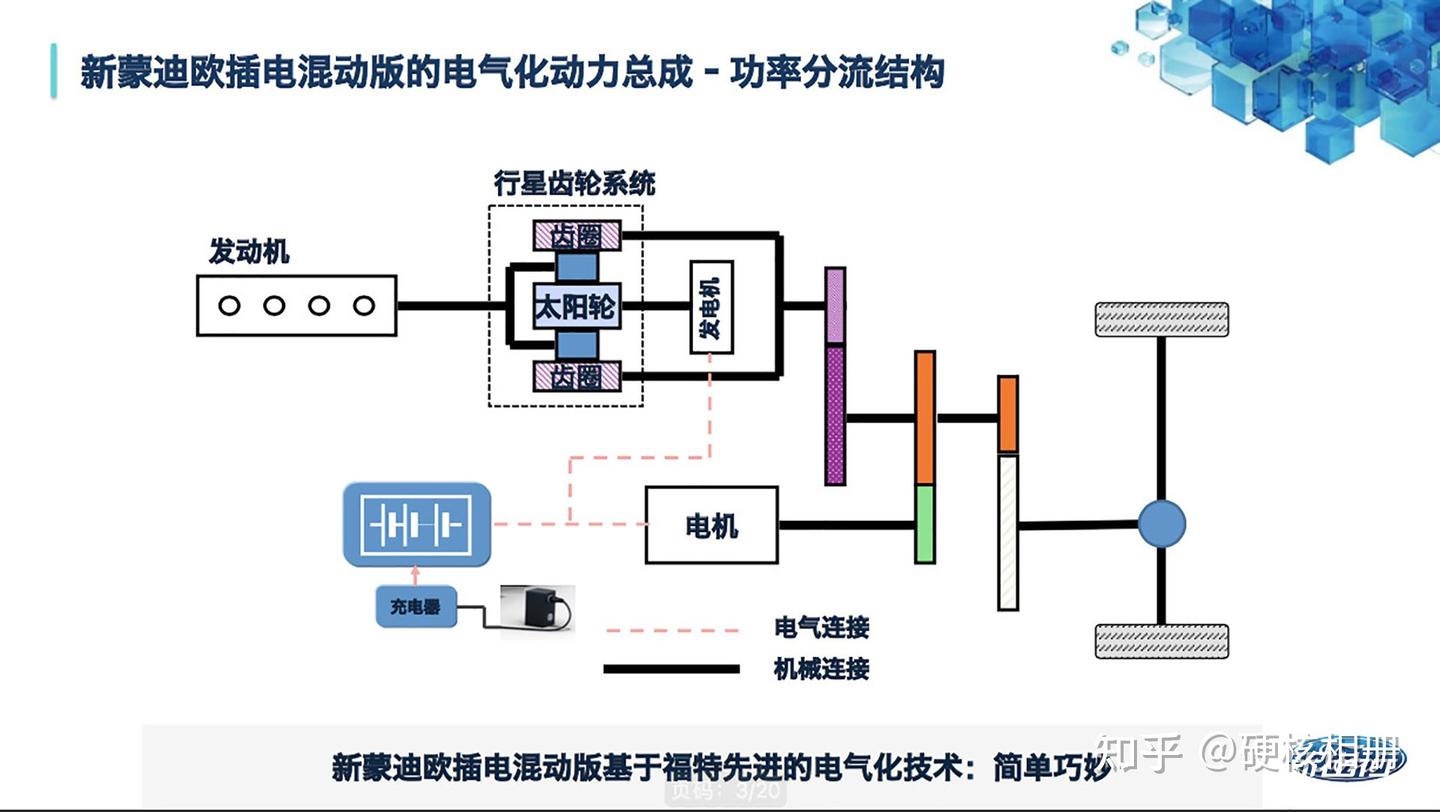
所以,技术原理就是行星齿轮动力分流,而且接法也一样。所以,懂丰田就懂福特,两者的eCVT原理都一样。现在的问题就是,网上对于丰田THS讨论很早,但就是讲不清楚。这里从义务教育的最基本的物理和数学方程的角度来解释一下行星齿轮动力分流原理,也就是所谓“输入性”行星齿轮动力分流PSD。
为了简化,我把PSD上图连接方式稍微修改一下,把 MG2驱动电机移到后轴,因为都是电气电缆连接,可以随意修改,类似长城Hi4的样子:
- MG1调控电机接中间太阳轮;
- 发动机接中间行星齿轮架;
- 最外的齿圈ring接入减速器, 直连前轮;
- MG2驱动电机放在后轮,驱动车辆。
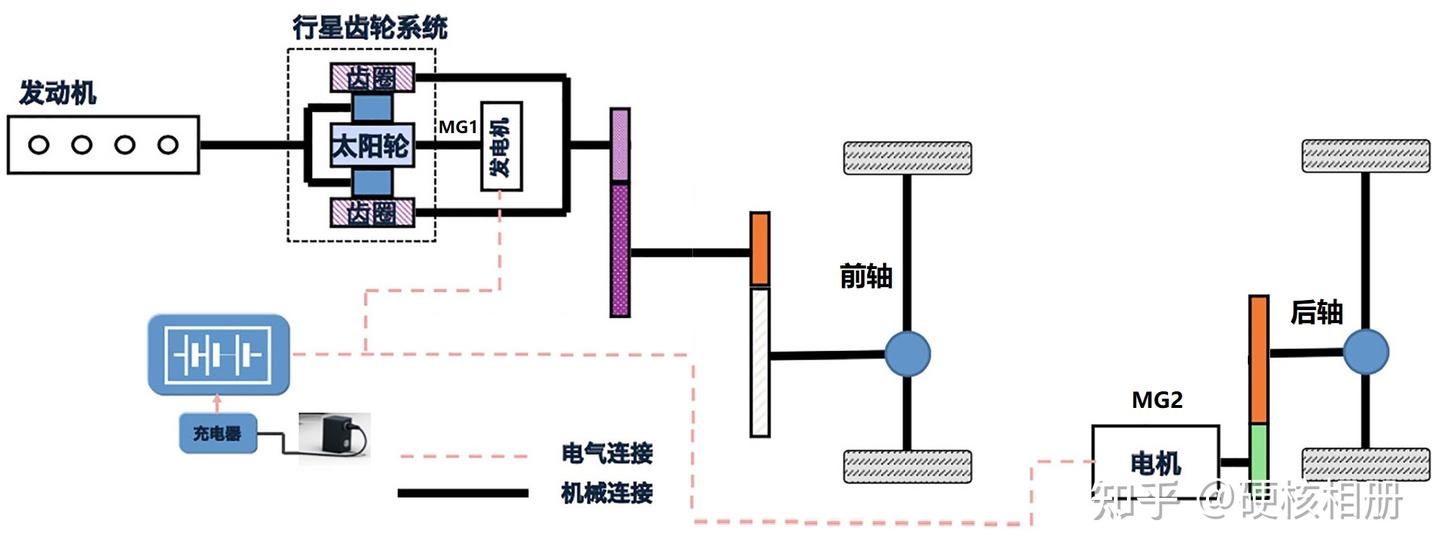
前三点行星齿轮接法和Ford/THS一样,第4点就是把驱动电机放到后轮,这样解释原理清晰易懂多了。发动机通过行星齿轮最外的齿圈ring部分能量就直接给到前车轮。我们只要讨论前车轮的行星齿轮关系就可以。注意上面的第3点:最外的齿圈ring接入减速器, 直连前轮。MG2电机就和前车轮没关系了,前车轮只和发动机和MG1电机存在行星齿轮方程的数学关系。
实际上,行星齿轮存在两种数学关系:二元方程和三元方程。二元方程,只需要确定一个参数,其他结果可以计算;而三元方程,就需要确定两个参数,余下的一个结果才可以通过计算得出。行星齿轮,可以是三元关系,也可以是二元关系。三元关系的前提是行星齿轮三个同心圆太阳轮sun、行星架carrier、最外的齿圈ring三个部件都没有锁止,都能自由转动。
所谓的三元方程关系,其实就是黄色太阳轮sun、绿色行星架carrier、红色齿圈ring三个部件的转速关系,包括转速的快慢和方向。这个受三元方程式的数学原理约束。三元方程虽然数学上非常简单,但理解比较抽象。不过,直观表现叫“转速杠杆”,这个就很容易理解,这个待会儿会反复提及。上图3是理论上的,行星齿轮的实物如下:

上图4就是丰田行星齿轮PSD实物,大小高度大约一个可乐易拉罐的大小。左侧齿圈Ring直连前车轮,中间行星架Carrier接内燃机ice;中间太阳轮Sun连接MG1调控电机。实际工作中,这三个部件大部分时间都会旋转,少部分时间中间连接发动机的行星架会受控不动。控制部分的关键就是中间连接太阳轮Sun的MG1调控电机。
电机常识
讲MG1调控电机之前,必须要先理解一些电机常识。和内燃机不同,电机可以输出负扭矩(动能回收充电)。电机实际有两种工作状态,驱动电机TM(Transient Motor)状态和发电机状态(GEN),因此如果叫MG电机,就是电机即工作电机状态,也可以工作在发电机状态。行星齿轮连接的叫MG1、MG2,两台都能工作在电机/发电机状态,只不过MG1大部分工作在发电机状态,因此也有叫MG1电机是发电机,但实际并非如此。
电机到底处于哪个状态,取决于驾驶者的主观意愿。举个例子,当时速100公里行驶的纯电车,电机到底处于哪种状态?这取决于驾驶员的需求到底是加速还是减速?如果加速,电机就是驱动电机TM状态;如果想要减速,就是动能回收发电机GEN状态。至于怎么切换,都可以通过所谓“电控”的固定流程处理,无论是异步电机还是永磁同步电机,都是如此。
| 电机状态 | 描述 | 场景 |
|---|---|---|
| 电机状态(TM) | 转速方向和扭矩方向相同 | 风扇、电动车前进和倒车 |
| 发电机状态(GEN) | 转速方向和扭矩方向相反 | 风力发电机、电车动能回收 |
| 电机空转 | 电机无电流、无扭矩(科普前设的理想状态) | 静止或惯性旋转 |
| 电机堵转 | 电机有电流、有扭矩,但,转速为零或极小 | 电机成了电阻,发热 |
电机常识的容易混淆的地方有两个:
- 经常把电机逆向旋转视为“发电机状态”。这是错误的,因为电动车倒车,就是是逆向旋转,但是处于电机状态。
- 转速为零是电机状态,消耗电功率。因为发电机是先有动能转速,再有电流输出;而电机是先有电流注入,再有机械能转速的。当已经静止的以后,如果要不让电机空转,克服外部惯性让电机静止,就需要消耗电力,这就是“电机堵转”[2]。
比如,钢铁厂的电磁吊车就是消耗电力。第2点,在理解丰田/福特THS没有离合器非常重要。也是THS理解的一个难点。
没有离合器(锁止器)
这里先谈一个概念,丰田的精髓在于“没有离合器”。尽管插电板增加了“单向离合器One-way clutch“[3],这个one-way clutch实际是“单向止逆器”,是用来防止发动机逆向反转的,并非锁止器。所谓“离合器/锁止器”,其实就是锁止行星齿轮三部件(最外的齿圈、中间行星架、最内太阳轮)的任何一个或者两个。类似下面视频这种:
 视频5:行星齿轮四种锁止方式https://www.zhihu.com/video/2037520065810183506
视频5:行星齿轮四种锁止方式https://www.zhihu.com/video/2037520065810183506题主 @物联网神棍 提到的6AT变速箱原理,其实用到的都是不同的离合器不同的行星齿轮锁止三个不同部件,由此模拟手动档换挡不同的齿比。这里面的数学关系重点在于:当行星齿轮锁止状态,不是三元数学关系,而是二元数学关系。
以上这点一定要切记!所以,不是行星齿轮就必然是功率分流,AT变速箱就是行星齿轮,但AT变速箱不是功率分流,类似还有吉利雷神3DHT[4],用了2个行星齿轮但不是功率分流,和AT一样,主要用锁止器。当行星齿轮主要是用于锁止器切换,其实挺好理解的,就是上面视频下面不同组合的“齿比”相乘,数学原理其实和手动MT变速器其实一样。
发动机转速和扭矩不变,也就是发动机输出功率不变,通过AT变速箱不同齿比变换,输出转速变慢,那么自然扭矩增加。这其实是行星齿轮的二元数学方程,也就是上面视频下半部分画面的公式。
行星齿轮动力分流PSD的三元数学关系
但丰田/通用是没有行星齿轮锁止器,三个部件都是自由可转动的。这就是是行星齿轮的数学三元方程式,我们从行星齿轮的扭矩和转速两方面来讲。
行星齿轮动力分流PSD,扭矩是二元数学关系
任何一个行星齿轮,其最外的齿圈ring齿轮个数和太阳轮的齿轮个数都是固定的,两者齿轮数量之比 是一个固定值 ,这个叫“行星齿轮的特诊参数”,是一个硬件固定有理数,无法改变。注意这个特征参数在上面视频下半画面的齿比公式中始终出现。以下提到“特征参数”其实就是
这个固定数值。
丰田/通用的行星齿轮的接入方法是发动机接入中间行星架Carrier,当使用这种接入方法的时候,扭矩分配是固定的。
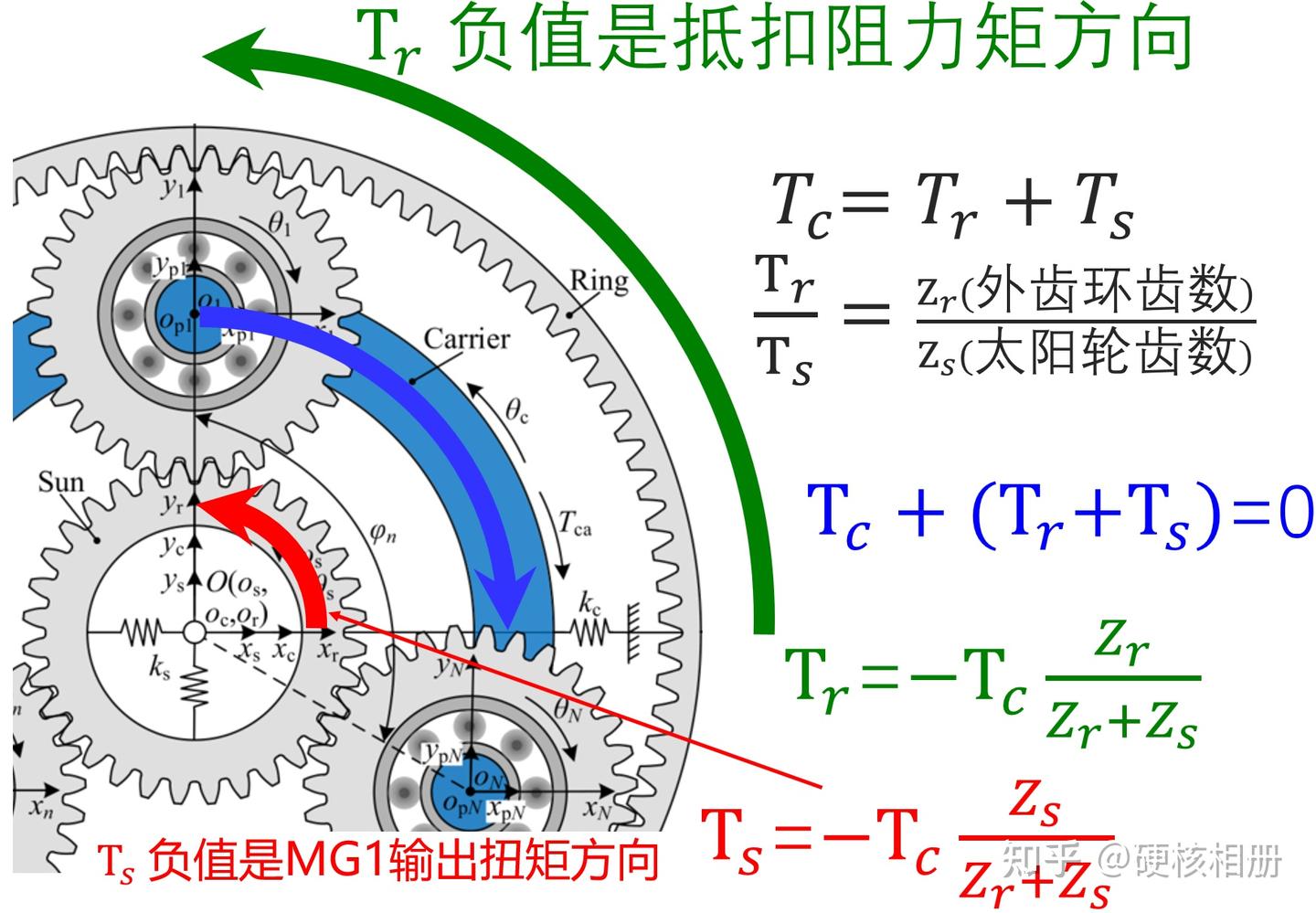
上图6就是发动机接行星架的扭矩分配公式,扭矩大小肯定是 ,且
,也就是行星架扭矩(发动机)=外齿圈扭矩+太阳轮扭矩。而且分配的比例就是齿数比,这是一个基于齿数的固定数值。
网上大部分科普都是上图黑色的公式,都是摘抄自机械教科书。但问题在于,大部分自媒体都搞错扭矩方向了。这里要注意反直觉的关键之处,是上图的彩色公式。紫色行星架扭矩分配公式符合牛顿定律公式,三者之和应为零;绿色齿圈和红色太阳轮,扭矩大小数值分配律,但是扭矩方向是和发动机是相反的,也就是说绿色是对应齿圈ring抵扣源自车轮的阻力矩。
福特和丰田这类发动机接在行星架Carrier、齿圈Ring连接车轮的接法,齿圈运动和发动机转向相同。所以,绿色 齿圈Ring扭矩为负值,这就是可以抵扣的车辆行驶所需阻力功率。而红色对冲的是行星轮MG1电机的输出扭矩方向。这里红色MG1电机输出扭矩方向非常容易混淆。(以上两点如果觉得不好理解,看后续的数学方程式分析就能明白)。
网上大部分自媒体科普,把绿色/红色的符号方向给忽略了,这里是一个非常容易混淆的地方。特别要注意,不要把MG1扭矩方向和转速方向混淆,这是两个概念。但无论如何,由于齿数是一个固定恒定值,因此扭矩大小分配的数学关系是二元的。也就是发动机扭矩,会按照恒定比例大小分配给外齿圈(前车轮)以及太阳轮(MG1调控电机)。二元数学关系是指,只需要行星架扭矩 一个变量,另外两个变量扭矩大小
和
自动可知。
行星齿轮动力分流PSD,转速关系是三元数学关系
当没有锁止,三者都转动的情况下,这是一个三元数学关系,就是一个简单的三元数学方程组
以上单个方程求解,变换成三个方程组:
- 太阳轮角速度:
;
- 最外部的齿圈角速度:
;
- 行星架的角速度:
。

把上面公式写入 Excel,就知道数学方程二元计算和三元计算的区别了。黄色都是根据公式自动计算的,齿轮数量78、30是固定不可改,公式用G7、H7用$G$7、$H$7固定防拖动修改。
- PSD扭矩计算二元数学关系:只需已知一个(输入一个D8),另外两个可以自行计算确定;
- PSD转速计算三元数学关系:必须已知两个转速(输入两个C7、C8)才能计算剩余E7。
- 扭矩和功率符合物理守恒定律。力和反作用力相等,扭矩三者之和为零;能量守恒,功率之和为零。
行星齿轮转速的三元数学约束关系,俗称“转速杠杆”,因为在模拟动画里面直观显示是杠杆关系,下面分析不需要数学公式,只需要看这个“转速杠杆”。但这个“转速杠杆”是基于上面的四则运算的数学三元方程组。
福特HF/丰田THS,行星齿轮PSD具体场景(低速和高速)数学分析
知晓以上行星齿轮数学方程式以后,题主的问题就容易解释了,其实就是低速行驶下的数学分析。注意,这里说一下,这里的原理解析按照图2的MG2电机移至后轴P4后电机的方案(类似Hi4-Z),但基本原理都一样。这里构筑一个科普的虚拟福特大马力乘用车,车型用类似昂科威和Q5L的中型SUV[5],不同车速所需按照如下连接估算。
不同车型 在不同车速时所需功率是多少?变速器方案采用和丰田一样的修改版(图2),最外的齿圈ring:78齿,太阳轮:30齿。发动机找不到EcoBoost 2.0T发动机,套用同样2.0T大众第5代EA888,电池和电机不特别受限。发动机转速同轴接入行星排行星架,MG1调控天机接入行星齿轮排太阳轮。
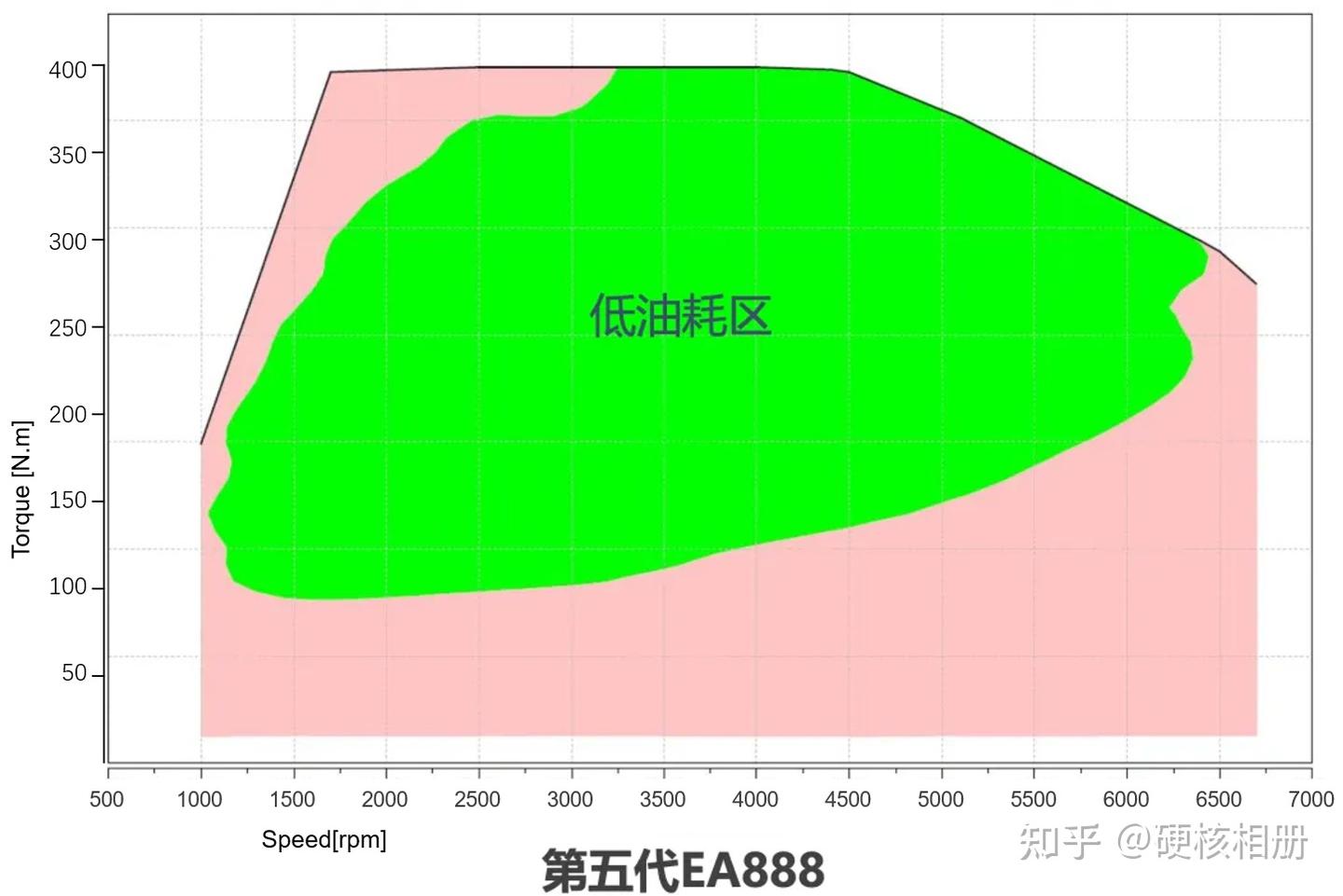
由于官方没有给出详细的热效率,这里假设绿区热效率40%,红色区域热效率25%,用来估算。发动机输出功率,可以自行根据 P=TN/9550(N转速rpm)自行带入计算。发动机热效率计算,由于大众发布会保密的原因,没法知道热效率详细,我们假设绿色热效率40%,红色热效率25%。
接下来各个场景具体分析一下。
PSD低速场景,低转速高扭矩
题主说的就是这个场景,实际只需要看行星架转速(ice) 和最外的齿圈Ring转速比就可以了。
| 时速 | 30公里/小时(18英里) |
|---|---|
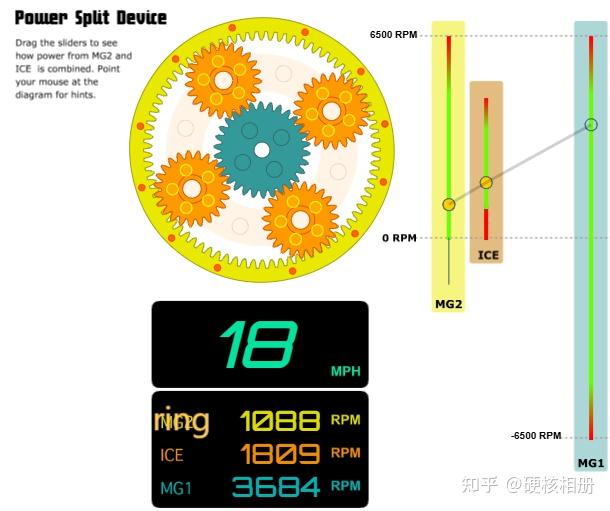
| 齿圈转速rpm | 1088 |
| 巡航所需功率 | 2.95kW |
| 发动机转速rpm | 1809 |
| 发动机扭矩 | 15.57 N.m(低效红区) |
| MG1状态 | 发电机 |
| MG1发电功率 | 1.36kW |
| 行星齿轮MG1电功率分配占比 | 46% |
时速30公里,此时前轴转速根据图2连接方式,外齿圈是1088转,这是硬性连接的。根据时速,拟定发动机转速不应过高,目标转速1809,对应发动机扭矩15.57N.m,根据【图8】发动机效率图,此时是发动机低效红区。根据热效率实际热值和燃油热值,发动机ECU可以给定节气门角度的喷油率。
根据此种条件,已知Ring齿圈转速和行星架发动机转速,那么根据三元方程组的“转速杠杆”,可知太阳轮MG1转速是3684,从【图9转速杠杆】可知,三个转速均为正值,可知旋转都是同向。MG1转速和发动机同向,是正向旋转;而根据【图6】可知,要达到这样的转速平衡(匀转速),MG1的扭矩方向红色 和发动机转速方向(行星架Carrier)相反,而MG1电机的转速方向却和行星架Carrier相同。由于MG1的旋转方向和扭矩方向相反,按照电机常识,此时MG1工作在发电机状态。
根据扭矩固定分配比例和转速相乘,可知太阳轮分得的机械旋转动能功率是1.36kW,占发动机输出功率的46%。理论上,这些发电的功率全部通过电气流到后轴P4电机。而行星齿轮的齿圈Ring部分,传递给前轮剩余54%的发动机输出功率。这样维持了30公里的时速。
不过以上的低速行驶,发动机工作在低效率的红区。并不能发挥THS的优势,这只是理论计算,现实工程师不会这样做。实际会把发动机状态调整到高效率区域。同样时速30公里,发动机NVH需求转速不会太高,扔保持1800rpm,同时增加节气门角度多喷油,MG1电机如果是异步电机,通过控制发电机转子的励磁电流,控制MG1发电机转矩[6]。那么,新的30公里工况如下:
| 时速 | 30公里/小时(18英里) |
|---|---|
| 齿圈转速rpm | 1088 |
| 巡航所需功率 | 2.95kW |
| 发动机转速rpm | 1809 |
| 发动机扭矩 | 100 N.m(高效绿区) |
| 发动机输出功率 | 18.94kW |
| MG1状态 | 发电机 |
| MG1发电功率 | 10.71kW |
| MG2动能回收功率 | 5.27kW |
| 电池充电功率 | 15.98kW |
| 行星齿轮MG1电功率分配占比 | 56% |
在这种稳态30公里发电情况下。可以看到,基本上19kW的发动机输出功率,理论上16kW给电池充电,3kW留给车辆驱动,大部分都在充电。具体估算的计算过程,根据公式,行星动力齿轮的扭矩分配结果是:
- 行星架(ice发动机)扭矩和功率:100N.m,转速1809,输出功率:18.94kW;
- 太阳轮扭矩(MG1电机)扭矩和功率:27.77N.m,转速3684,发电功率:10.71kW;
- 齿圈Ring扭矩和功率:72.22N.m,转速1088,稳态阻力功率:8.22kW。
实际上,30公里时速所需功率2.95kW。实际上前轮输出了8.22kW,那么后轮MG2电机用动能回收发电的方式,提供余下的5.27kW阻力发电功率。这样保持同样30公里匀速,但发动机工作在绿色区域。此时同样的转速,行星齿轮的电功率占比由46%,提升到56%。这就是低速高扭矩。
假如此时车辆上坡,同样30公里时速,车辆所需功率也是8.22kW。那么MG2电机取消发电状态,改为空转状态。把前轮的动力全部用于上坡行驶,发动机工况和MG1电机无需变化,仍能保持长上坡30公里时速巡航。如果到了平地,MG2扔空转,那么8.22输出功率讲超过30公里所需功率,车辆将加速,以维持一个新的平衡,达到一个新的巡航时速。
结论:当行星齿轮排动力分流PSD不是锁止,而是三元运动动力分流PSD场景下,三元运动PSD可以调整齿比速比。但和锁止的二元不同,三元的扭矩分配比例是固定的,当发动机输出扭矩不变的情况下,PSD不会增加扭矩。因此,调整速比以后,扭矩其实依靠被MG1发电机吃掉的动力部分,再通过电力回哺给前轮或后轮(参考【图2】的电气连接部分)。
同时,动力齿轮在低速情况下,其实不完全是和串联驱动全解耦一样,实际上还是一部分机械功率通过行星齿轮的最外部的齿圈,直接传递给前轮。这点和串并联的低速离合器脱开的纯串联解耦是完全不同的。如果没有离合器,行星齿轮排是没法解耦的。
PSD低速场景,低时速纯电行驶
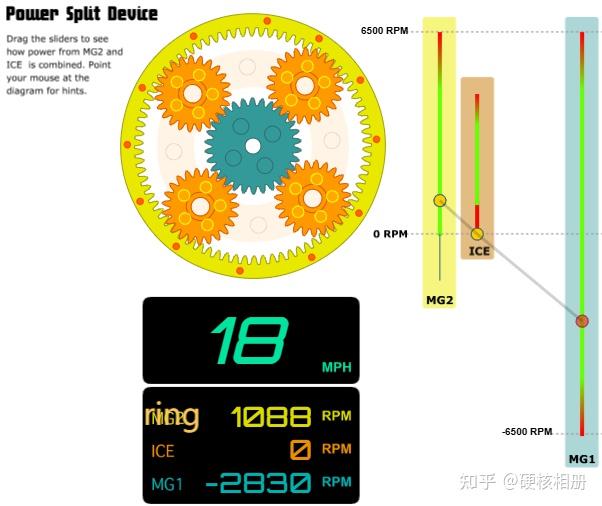
前面发动机绿区高效率输出19kW,其中16kW给电池充电。电池满了以后,会转为纯电行驶,转速转速为零。其实按照前面【图2】的连接方式,MG2驱动电机是在后轴P4电机的。因此,纯电其实都有后驱P4电机单独完成,类似于纯电车。前轴行星齿轮,完全随机空转,不产生扭矩。
但如果想让前轴MG1电机也参与驱动,那么由于行星齿轮的固有结构,以及发动机单向止逆器的存在,MG1电机只有反转才能驱动行星齿轮齿圈。
| 时速 | 30公里/小时(18英里) |
|---|---|
| 齿圈转速rpm | 1088 |
| 巡航所需功率 | 2.95kW |
| 发动机转速rpm | 0 |
| MG1状态 | 电机 |
| MG1驱动功率 | 0-2.95kW |
车辆30公里所需功率是2.95kW,只要前轮MG1+后轮MG2两者功率相加超过2.95kW所需功率就能保持30公里,或加速。这样,就可以用掉前面进入绿区高热效率的多发的电力。
“功率回流”现象,PSD高速场景
普通燃油车到了高速阶段,由于高速巡航所需功率较高,因此内燃机进入相对高热效率的稳态功率输出阶段,因此这时候油耗较低。而丰田/THS由于没有锁止机构,因此没法和AT变速器一样,锁止行星齿轮的三元部件的一个,形成固定齿比。需要用MG1电机提供调控扭矩,才能保持发动机稳态运行。
相对于传统燃油车,有部分功率通过MG1的正扭矩的数学方程约束。这个“正扭矩”就是MG1电机是驱动电机状态,这部分的功率就是“功率回流”。由于电功率存在发电、驱动的的二次能源转换,而且是高速行驶状态。这部分回流电功率的增程耗损,就是要比燃油车多耗油的地方。具体工况的方程式简要分析。
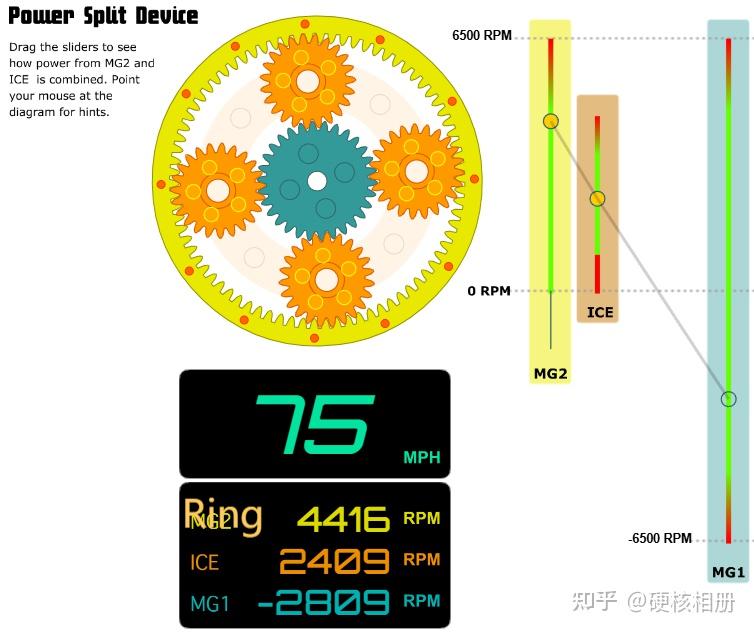
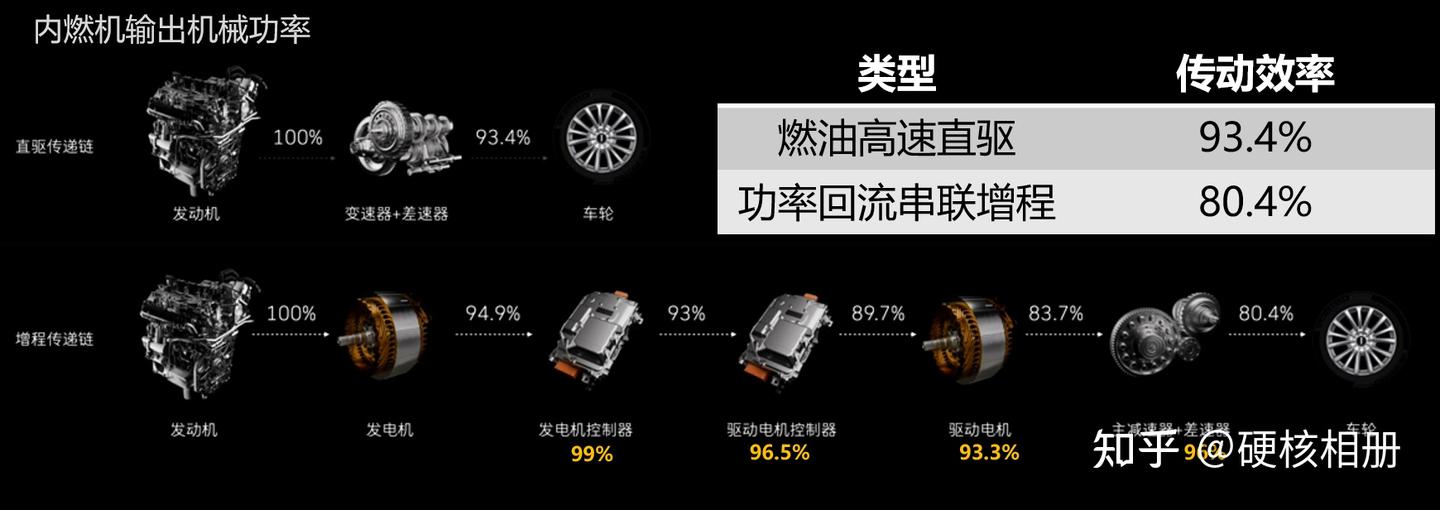
为了简化工况。行星齿轮排转速杠杆约束的回流电功率由电池提供,不计算耗损。只有这些由发动机提供的时候,才计算回流功率耗损。这样可以同级对比油耗,耗损按照【图11】的二次能源转换以15%的来估算。
场景表格1:电池满电,发动机和电池供电。
| 时速 | 120公里/小时(75英里) |
|---|---|
| 齿圈转速rpm | 4416 |
| 巡航所需功率 | 40.93kW |
| 发动机转速rpm | 2409 |
| 发动机扭矩 | 115 N.m(高效绿区底部) |
| 发动机输出功率 | 29.01kW |
| MG1输出扭矩 | 40.47 N.m(28%固定比例) |
| 电池输出电功率 | 11.9kW |
| 行星齿轮MG1电功率配占比 | 29.07% |
按照【图6,2.0T发动机热效率图】,发动机转速2409,扭矩115的工作点,是高效绿区底部和红色低效交接之处。这个工作点并不是太高的热效率,因为有电池电功率的补充。
由于内燃机ice接的是中间行星齿轮架,按照【图6:行星齿轮排扭矩公式】,可知太阳轮需要提供的红色 扭矩和行星架转速方向相反,而从【上图12】可知,太阳轮的转速方向也和发动机ice(行星架Carrier)相反。由于MG1扭矩方向和转速方向一致,因此MG1此时工作在驱动电机状态,需要消耗电力,而电力由电池提供。发动机和电池提供双份功率,满足120公里所需的41kW功率。
那么,假如电池没电,无法提供电力,那么此时MG1这部分功率就由发动机通过MG2发电提供。如果电功率回流存在15%的耗损,那么将近30%的发动机回流功率,存在30% x 15% =4.5%的功率耗损。这就是高速场景THS不如传统燃油车的油耗表现。下面按照上面方程简单分析。
场景表格2:电池没电,发动机提供电功率回流,电功率串联耗损,按照【图11】按照15%估算。转速和【图12】一样,但是发动机的扭矩变大,多喷油。

此时,由于时速保持不变,车辆的驱动功率仍旧是40.93kW。而实际上,发动机的输出功率是43.6kW。这多出的2.6kW就是功率回流的增程二次能源转换耗损。从【图13】可以看出,前轴直连的齿圈Ring的阻力功率是57.74kW,其中去掉40.93的车辆固有驱动功率,剩下的是后轴MG2电机的发电功率16.8kW,去掉15%二次转换比例以后,就是回流到MG1电机状态的消耗14kW功率。
| 时速 | 120公里/小时(75英里) |
|---|---|
| 齿圈转速rpm | 4416 |
| 巡航所需功率 | 40.93kW |
| 发动机转速rpm | 2409 |
| 发动机扭矩 | 172.88N.m(高效绿区中部) |
| 发动机输出功率 | 43.61kW(实功率) |
| MG1输出扭矩 | 48 N.m(28%固定比例) |
| MG1耗电功率(回流功率) | 14kW |
| 齿圈Ring扭矩 | 124.86 N.m(72%固定比例) |
| 齿圈前轴功率 | 57.74kW |
| MG2发电功率(回流功率) | 16.81kW |
| 行星齿轮MG1电功率配占比 | 38.55% |
这
| 时速 | 120公里/小时(75英里) |
|---|---|
| 齿圈转速rpm | 4416 |
| 巡航所需功率 | 40.93kW |
| 发动机转速rpm | 2409 |
| 发动机扭矩 | 172.88N.m(高效绿区中部) |
| 发动机输出功率 | 43.61kW(实功率) |
| MG1输出扭矩 | 48 N.m(28%固定比例) |
| MG1耗电功率(回流功率) | 14kW |
| 齿圈Ring扭矩 | 124.86 N.m(72%固定比例) |
| 齿圈前轴功率 | 57.74kW |
| MG2发电功率(回流功率) | 16.81kW |
| 行星齿轮MG1电功率配占比 | 38.55% |
这里的功率回流是38%,不过此时的发动机热效率是高效率的绿区中部。
有些同学,觉得功率回流可以避免,比如可以通过MG1调低转速,比如类似这样。
按照【图6,2.0T发动机热效率图】,发动机转速2409,扭矩115的工作点,是高效绿区底部和红色低效交接之处。这个工作点并不是太高的热效率,因为有电池电功率的补充。
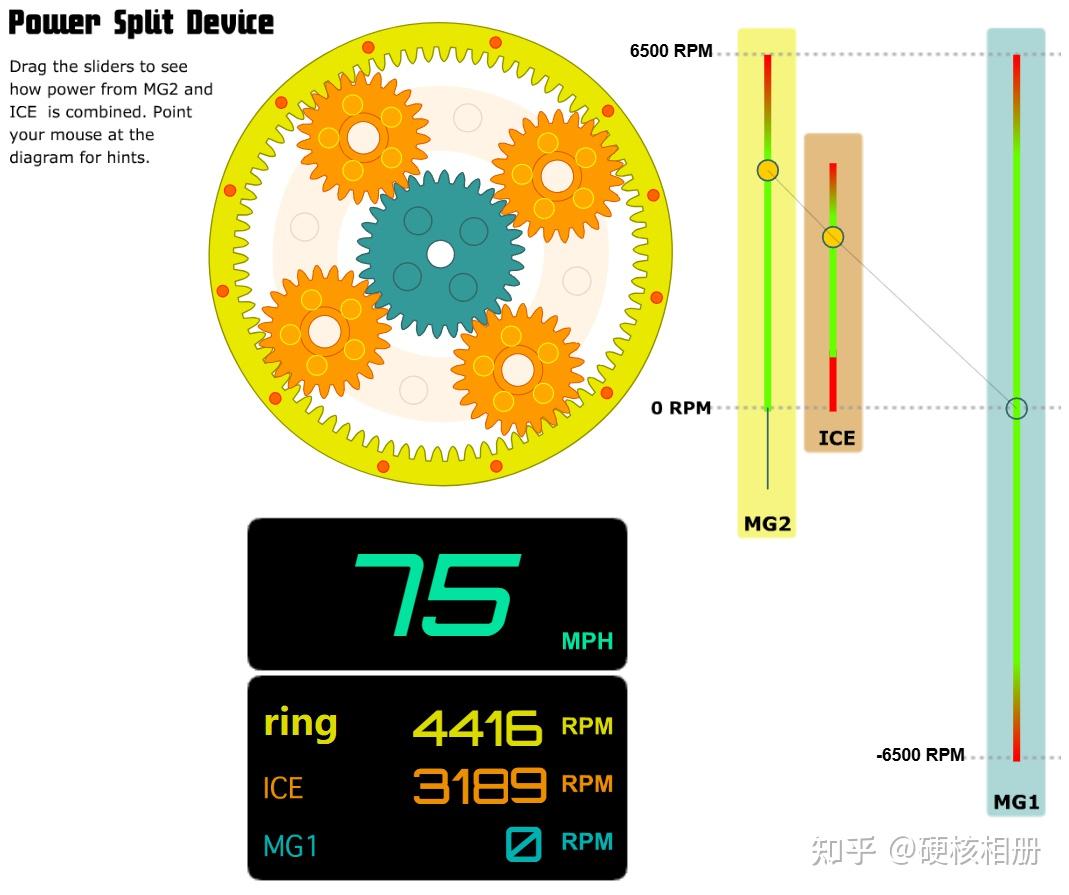
有很多同学觉得,MG1可以无功耗保持MG1转速为零。其实此时发动机输出扭矩122.5589746001881 N.m,按照【图6】的分配比例,此时MG1电机应该输出34.04415961116337 N.m扭矩。从前面的“电机常识”可知,当电机堵转,不管向哪个方向输出扭矩,都是正扭矩。因为此时电机有电流、有扭矩输出,但转速为零。此时的电机就是纯电阻发热,会产生涡流。实际上,电机要工作在发电机状态,是需要一定的转速的,风力发电机需要一定的初始速度。而电机的转速极低的堵转情况下,电机的工作效率极低,大量的电功率是用来发热。所以,THS不可能工作在这种状态下,除非增加锁止器。
广汽丰田曾经做过这样的测试(DOI:10.13700/j.bh.1001-5965.2023.0110)[7],加装了一个太阳轮机械锁止器。这样THS工作在【视频5】的锁止太阳轮状态。这样,THS成了一个发动机直驱减速比的固定减速齿轮。
| 时速 | 120公里/小时(75英里) |
|---|---|
| 齿圈转速rpm | 4416 |
| 巡航所需功率 | 40.93kW |
| 发动机转速rpm | 3189 |
| 发动机扭矩 | 122.5688N.m(高效绿区) |
| 发动机输出功率 | 40.93kW(实功率) |
| MG1输出状态 | 机械锁止 |
| 齿圈前轴功率 | 40.93kW |
这样就没有功率回流了。
结论:
实际上THS如果没有锁止器的行星齿轮,是一种硬件全耦合,软件半解耦的状态。和离合器分离的串联纯解耦是两个概念,受到行星齿轮的固定约束。
THS在高速工况下,各个型号的齿比不同,存在“功率回流”现象,其高速特性不如高速直驱的燃油车和并联直驱的串并联高速工况。