小米用户称天冷前轮转向会发出「咯噔」声,官方称是正常现象,车企口中的「阿克曼角」现象到底是怎么回事?
阿克曼转向几何原理
现代汽车使用了一种叫阿克曼转向的技术[1-3]。在该技术出现前,车辆(如马车)主要使用如图 1 所示的单铰链转向技术。尽管单铰链转向也能使内外转向轮路径指向同一个圆心,但其存在很多缺点。因为要绕着中间单一的轴转弯,摆动空间过大会引起很多不稳定。而且因为两个前轮是平行的,转弯过度时容易卡死而动不了。
阿克曼转向(图 2)技术有效避免了单铰链转向的缺点。车轴转弯的时候,内外轮转过的角度不一样,内侧轮胎转弯半径小于外侧轮胎。使四个轮子路径的圆心大致上交会于后轴的延长线上瞬时转向中心,让车辆可以顺畅的转弯。
为了具体说明阿克曼转向几何原理,我们将车辆简化为图 3 所示的结构。
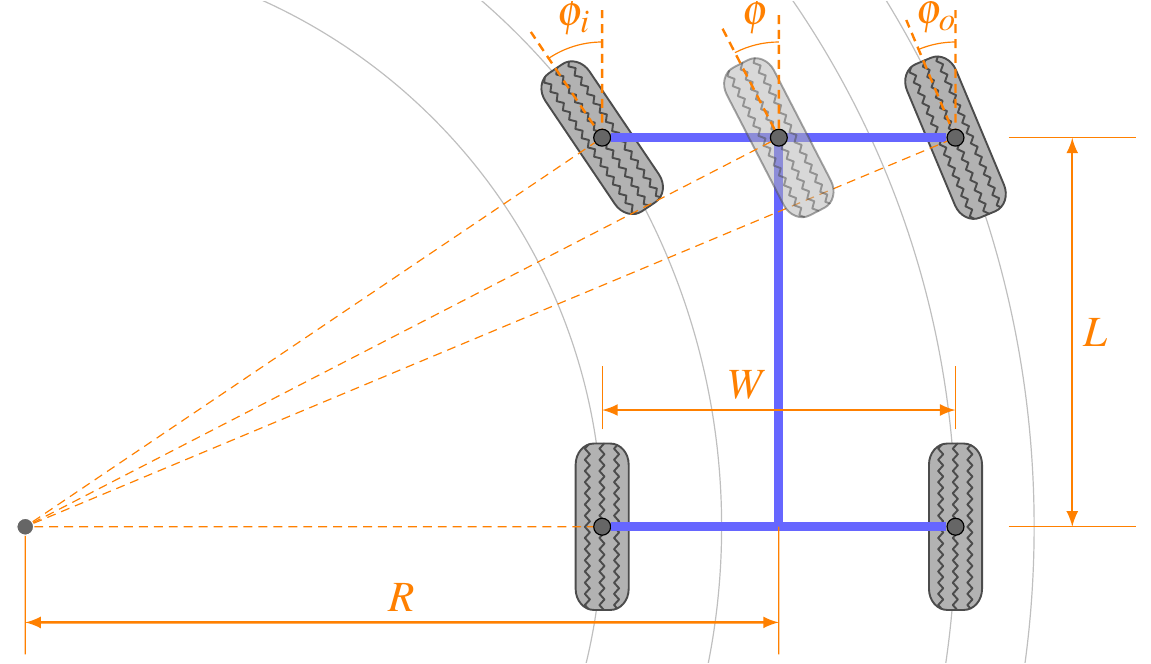
图中 为轴距(前轴中点到后轴中点的距离),
为轴长,
和
分别为内外侧前轮转向角,
为车辆中心线到瞬时转动中心的距离。则有
其中 为假想位于前轴中点的车轮应有的转向角。将上式中的
和
取倒数并作差,便可得到阿克曼转向公式:
车辆运动方程
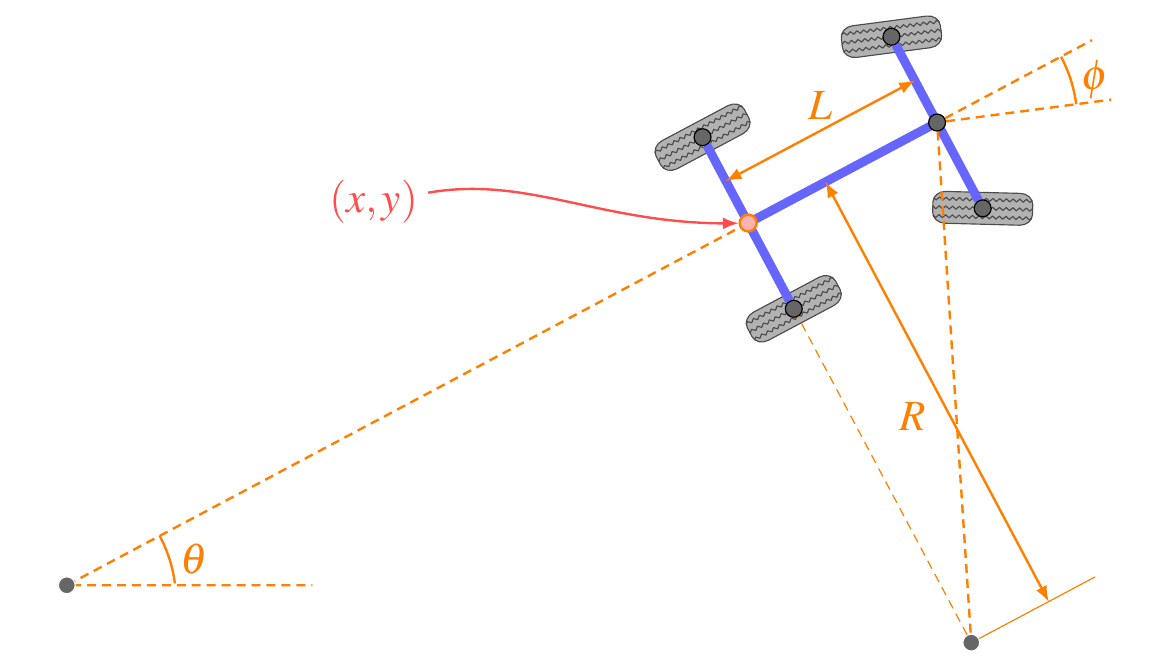
如图 4 所示,车辆的状态可以由 (,
,
,
) 来描述。其中 (
,
) 表示车辆后轴中点位置,
表示车身朝向,
表示前轮转向角。
要根据前轮转向 和车速
获取车辆运动状态,实际上就是确定下面一组微分方程:
在图 4 所示的瞬间,后轴中点的瞬时运动方向是垂直于到瞬时转动中心的方向的,因此
其中 为车辆(后轴中点)的速度。接下来需要确定车辆朝向的转动速度
。如果用
表示车辆行驶的距离(速度对时间的积分),则有
=
。根据阿克曼转向几何原理可知
=
/
,因此有
综上所述,我们得到了描述车辆运动的三个微分方程:
其中 为车速,
为轴距,
为前轮转向角。
测试
上文根据阿克曼转向几何原理建立的车辆运动方程,只要给出车辆控制参数(前轮转向角和车速)关于时间的函数,就能通过数值积分还原出车辆的行驶状态和轨迹。随时间变化的控制参数是由驾驶员控制的:前轮转向角由方向盘控制,车速由油门和刹车控制。我们人为设置了一个泊车场景,道路和车位情况如图 5 所示。驾驶员需要通过控制车辆前轮转向角和车速,将车从左下角位置移动到右边的停车位中,并且使车头朝外。
模型给出的模拟动画已经显示在图 5 中,对应的控制参数(前轮转向角和车速)如图 6 所示。
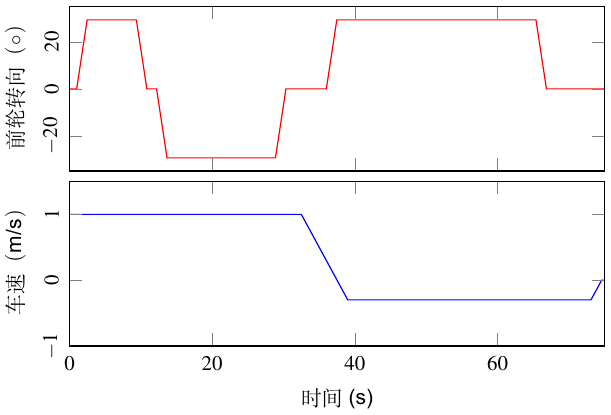
通过观察图 6 中车辆中心(红)和后轴中点(蓝)的轨迹,还可以发现:车轮在转弯时,两点的轨迹并不重合,红点轨迹的曲率半径总是略大于蓝点的。这与阿克曼转向几何原理是一致的。
参考资料
[1] Wikipedia contributors. Ackermann steering geometry, 2021: https://en.wikipedia.org/wiki/Ackermann_steering_geometry
[2] Robert Eisele. Ackerman steering, 2008: https://www.xarg.org/book/kinematics/ackerman-steering
[3] Steven M. LaValle. A simple car, 2006: http://planning.cs.uiuc.edu/node658.html