
分布式电驱(篇二)三电机比双电机好 四电机比三电机好?
分布式电驱(篇二)三电机比双电机好 四电机比三电机好?分布式电驱 三电机比双电机更好 四电机比三电机更好?
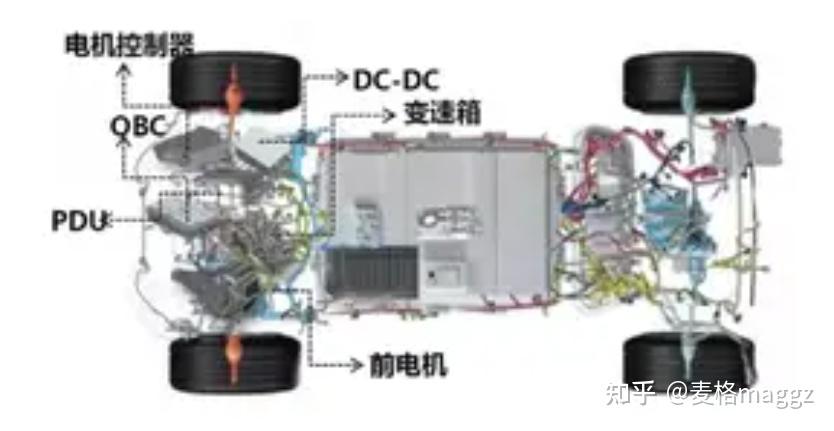
1 集中式电驱
一般的乘用电动汽车搭载一到两个电机,采用集中式电驱方案,单个电机放在前轴或后轴,抑或是前后轴各一个电机,电机通过传动系统(减速器、差速器、传动轴等组成的驱动桥)将动力传递至两侧的驱动轮上。
优势
集中式电驱与传统的燃油车相比,在传动系统设计上基本通用,技术成熟度高,整体开发难度低,也具有一定的成本优势。
缺点
通过传动轴等传动系统输出动力到两边的驱动轮,动力传递路径长,相对分布式电驱来说还是会存在较高的机械传动损耗,且动力输出的灵活性相对较低。
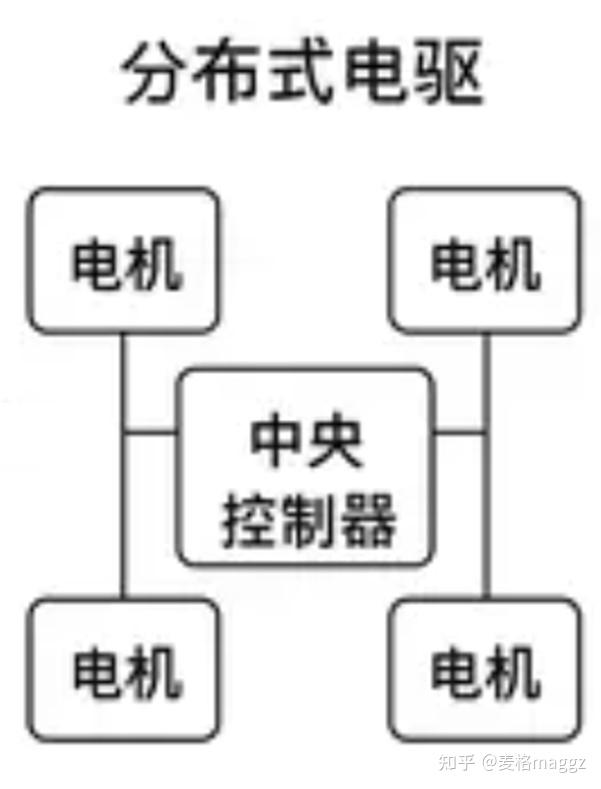
2 分布式电驱
增加电机数量至三到四个,令电机布局更加靠近驱动轮,甚至是直接安装在驱动轮内部。
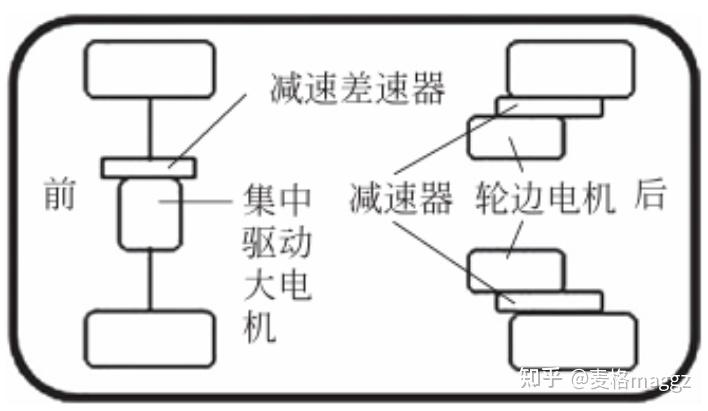
分布式电驱的两种主要技术路线,
轮边电机,驱动电机直接安装在驱动轮旁边,通过半轴或减速器与驱动轮相连;
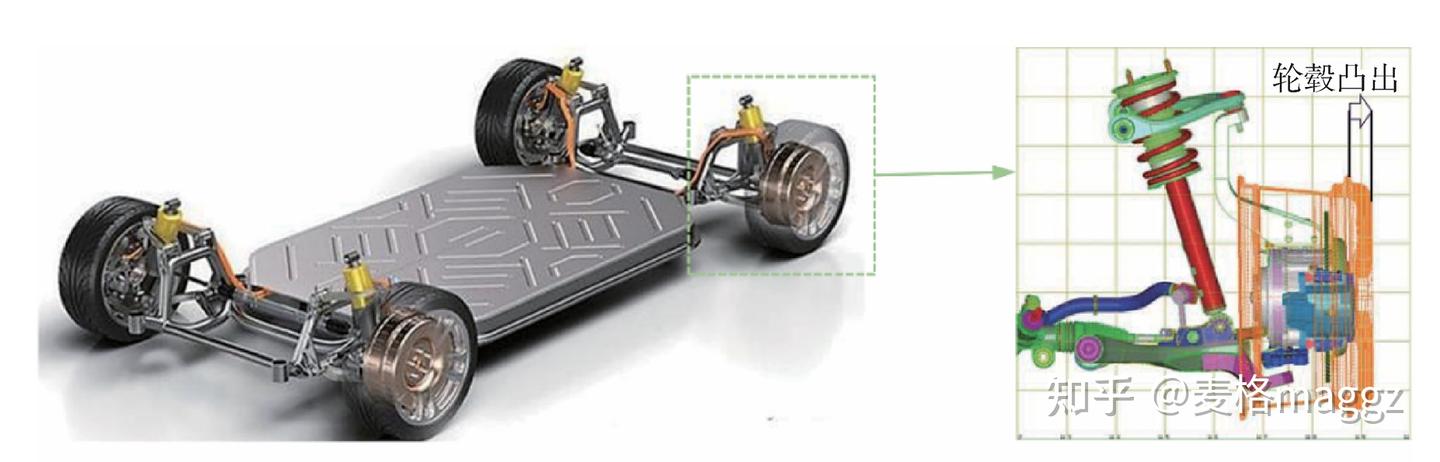
轮毂电机,驱动电机直接在驱动轮内部,直接驱动或是通过内置的减速器来驱动车轮。
三电机系统
在同一辆新能源汽车上配备三个独立的驱动电机,通常包括前轴单电机和后轴双电机。
前轴单电机负责驱动前轮,主要用于低速巡航和起步阶段。
后轴双电机分别驱动左后轮和右后轮,提供更大的动力输出和更好的操控稳定性
这种设计不仅提升了车辆的动力输出,还优化了操控性能和能源利用效率。
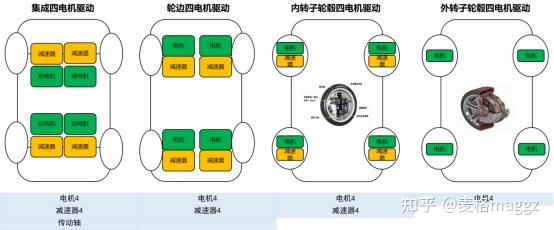
四电机系统
四电机驱动分为三种形态:集成式四电机驱动、轮边式四电机驱动和轮毂式四电机驱动,其中轮毂式四电机驱动又可分为内转子式和外转子式。

- 集成式四电机驱动
四电机驱动的初级形态。
前驱动系统和后驱动系统分别由两个电机集成在一起,通过减速器减速增扭后,与传动轴连接,可独立控制车轮。
前后两组驱动系统未能实现横向机械解耦。
相比传统双电机四驱,取消差速器,轮间转速差和动力分配可控制电机自由调节。
技术难点
电机协同控制是首要难题。
四个高转速电机独立驱动四个车轮,考验车身稳定性,影响轮胎寿命,尤其在起伏或转向等路面,对传感器精度、信号传输速度、控制计算、驱动执行等要求更高。
在机械强度、电磁兼容、低速温升管理等也面临挑战。
技术趋势
提升自动驾驶执行层性能,推动自动驾驶技术发展。
自动驾驶执行层中最重要系统是电驱动和转向。
四电机驱动融合驱动与转向,实现车轮驱动和转向的双重动力源作用,更易于控制,同时,配合自动驾驶软件算法,提升动力系统控制精度,可进一步拓展更多自动驾驶场景。
- 轮边式四电机驱动
技术原理:四个驱动电机实现横向机械解耦。四个驱动电机独立分布于车轮内侧。
电机与减速器集成,减速器与车轮连接。
相比于集成式,轮边式四电机驱动由于取消传动轴,传输效率更高。
技术难题
受制于现阶段电驱系统体积功率密度,轮边电机布置在车轮内侧,电机布置在车轮内侧与悬架等会产生一定空间占用,因此轮边驱动系统目前仅应用在商用车领域。
技术趋势
受制于结构影响,在乘用车领域应用难度大;可利用轮边驱动的特点,在特定领域发挥优势。

- 轮毂式四电机驱动
轮毂式四电机驱动可分为内转子电机和外转子轮毂电机两类。
由于轮毂电机集成到轮毂内,会加重簧下质量,损伤悬架灵活性,影响舒适性。
内转子的电机、电控、刹车片等集成在轮毂内,与轮边式驱动原理类似。