仰望U8倒爬天门山,它的越野能力有多强?
比亚迪应该算是国内最早投入电驱越野技术和乘用车品类开发的先驱者,至少之一吧。仰望品牌U8和方程豹品牌豹5、豹8也先后上市有两年记了,但看到比亚迪综合越野开发中心能提供类似这种集中标定的测试场景和产品表现,还是比较令人震惊的。
比如这个45度角(100%)的钢制可变坡道,

图表 1 45度钢制可变坡道,U8的倒行爬坡,来自B站up主“小倨试车”视频截图;
从正面看,这个可变坡道的角度在视觉上给人感觉已经非常夸张了。再看一张坡道的正面视图。

图表 2 45度钢制可变坡道正面,来自B站up主“智在出行”视频截图;
除了视觉冲击,其实这里有几个细节可以注意一下,算个科普点。
一个是,注意坡底的那个弧形垫板。主要是为了保护被测车辆车头接近角和车尾离开角不满足坡道和地面夹角的前提下,可能会刮底,尤其是越野冲破时的车头底部剐蹭。那就没必要了。所以这里加个垫板没有其他意思,毕竟坡道本身的绝对角度和坡道长度已经摆在那里了。从上图其实也能看出来,U8再往地面开,如果没这个垫板,现在U8的底盘高度已经相当高的前提下,是也有可能发生剐蹭的。
另一个是,越野领域里对于坡度的定义除了角度,还有坡道斜率(用百分比表示),如下图:
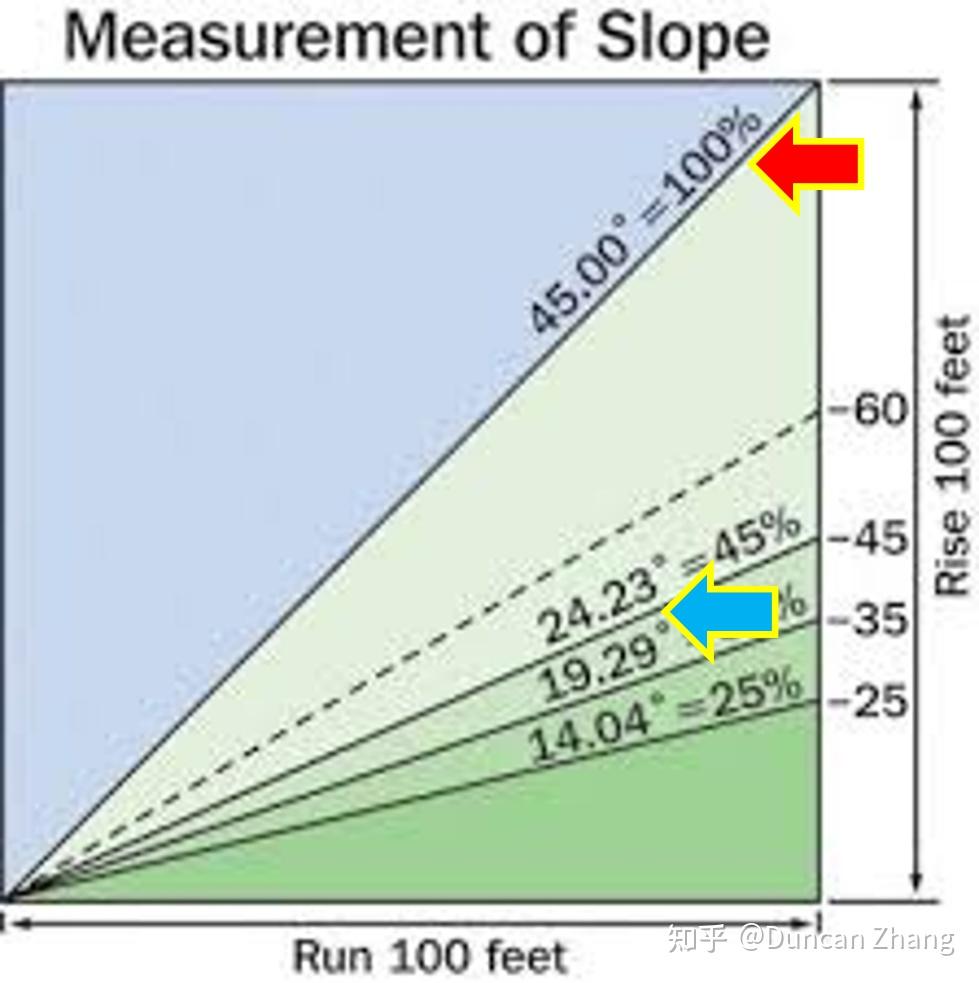
图表 3 Slope的两种定义,来自互联网;
红色箭头所指为45度坡道(Slope),且斜率为100%=1。在有些宣传语境下,市面上会有越野产品说自己最大攀爬45坡道,其实是指上图蓝色箭头45%斜率,绝对角度实际为24.23度。因为工程上,有时会选择坡度定义为上升高度与水平距离之比,也就是斜率。这种定义下100%的坡度是指水平距离为100米时,上升高度为100米。
可以确认的是,比亚迪仰望U8的这种钢制可变车道的攀爬能力,是定义在45度角100%的。
其实别说三吨多重的大型越野车了,就是个人上去,也很难站住。

图表 4 45.03度的钢制坡道行走,来自B站up主“智在出行”视频截图;
注意看比亚迪综合越野开发中心的这条道的表面细节,区别于商业展览使用的工装,似乎是一种钢筋网,经极限越野测试长期高频测试使用,能看得出来表面磨得发亮包浆,估计附着力还低于常见的商业展览工装。
现场测试时,普通人站在坡上都站不住。
再看35度的天门山天梯坡道,

图表 5 35度天门山坡道,来自B站up主“智在出行”视频截图;
这种阶梯坡道,相比平面坡道,轮胎和坡道的接触面更窄更细小,理论上抓地力会进一步下降。如果再考虑到悬挂调校不能非常精准适应这种极限场景,车身在通过过程中还会出现更明显的震荡和颠簸,会进一步影响轮/地附着状态。对整车的动力分配能力和扭矩精细化控制都提出了很高要求。
还因为是钢制表面,这套工装的附着力本身就比天门山的岩石台阶更低,而且测试次数越多,表面越滑,对车辆控制能力的考验也越严苛。
我们都知道,比亚迪仰望旗下固有的招牌技术——易四方,本身最核心的特点就是精准和快速的四轮扭矩分配技术,这已经是行业内这个方向上公开的技术标竿(之一)了。在当前主流的电机(高速执行)和电控(高速集成性计算)的技术体系加持下,其实做到这一点并不是最难的部分。但是如果需要尽可能在这条电机控制回路上挖潜,把易四方的扭矩调配能力发挥到最高,尽力匹配物理世界的要求,那可就不简单了。
这种控制体系可以触碰的性能上限很高。但关键是要认识到,在这种以电为主的控制闭环内,电机扭矩的调节节拍、扭矩的爆发力都不是问题,这里的上限,是严重依赖于对于路面条件(尤其附着力条件)的感知能力,包括预测、实测的能力,就是根本决定性因素了。这种感知的精度和速度,最终决定电驱体系(易四方)在复杂路况下能走多远、能到多高,能和传统机械越野的全时四驱体系拉开多大的性能差距。
就比如这种极限的坡道通过测试,对于车身动力学形态的感知,特别是四个轮胎滑移率的感知能力,最终会决定易四方如何为四轮分配最恰当的扭矩,以对抗滑移,实现稳定滚动下的攀爬和退坡。驾驶员坐在驾驶位,始终对于方向和油门的掌控是处于线性感觉区间内的,即在整个过程中,始终给车输入就有相应合理的输出回馈。这种感觉就是最有信心的越野状态。
在比亚迪技术体系内,这个关键的决定性因素叫做eTCS2.0。
我记得两年前比亚迪发布方程豹豹8的时候提到过,当时提出的“蠕行模式”、“暴力模式”等等越野概念,本质也是在追逐这个目标,只要解决四轮对于路面的附着力准确、迅速的感知问题,电驱越野就是王。
所以我们把注意力主要放在eTCS2.0中的感知实现细节上——“eTCS 2.0搭载动力学+视觉识别两套识别方案,全速域感知附着力变化,四轮扭矩精准分配。可自动识别地形、自动选择模式、自动激活控制技术,把控制精度直接落实到每一个轮端,实现全场景全速域智能化地形识别与车辆操控。”
这里可以做个技术推演,仅供参考:
1
视觉识别能力(可能单纯基于摄像头,也可能叠加LiDAR的结构感知能力)在识别基础场景,比如这是沙漠或这是草地,之后,可以为后续扭矩分配的控制算法提供一个大致的附着力先验值or区间。
然后再进行附着力细化评估,比如通过基于图像识别的深度学习大模型(上次比亚迪杨东升在技术发布会上提到过这个概念),将视觉捕捉到的纹理、色泽、湿度等特征,映射到预训练好的模型中去进行进一步附着力预测。例如,识别到草地大范畴下的细分——湿滑泥地,系统会更新一个较低的摩擦系数基准值。
当然,如果有Lidar加持,还可以在更高精度上做路面的几何补偿。这就是越野场景下常见的异形路面所需要的评估阶段。不仅要考虑路面属性本身,还需要同时实时感知、预测和计算路面的坡度角度、台阶高度和路面起伏……等等,这些几何数据会进一步影响四轮实际所面临的附着力条件。(其实这部分也可以依赖后续的动力学本体传感器来完成)
这部分修正后的路面结构感知结果,不仅可以直接输入给附着力物理模型,还可以提供给悬挂云辇-P+,使其在轮胎接触障碍前就完成悬挂刚度或高度的预调整。
以上只是理论推测,实际比亚迪在eTCS2.0阶段采用了哪些环节、每个环节是根据感知结果进行后台经验公式测算、还是直接交给模型进行预测……实现过程的细节是未知的,但对于我们能看到的实际越野攀爬效果来看,又是扎实的。
2
动力学识别能力。包括高精度 IMU(惯性测量单元),通常是六轴(三轴加速度 + 三轴角速度),实时捕捉车身的纵向、横向加速度及俯仰、翻滚、横摆角速度。电机电流/反电动势感知:这是电驱特有的优势,可以极高频率感知轮端的实时输出扭矩。和高分辨率轮速传感器。
大面上看,这里的动力学感知属于反馈与修正链路。它的采样频率远高于传统燃油车,能够感知到轮胎橡胶与地面之间极细微的“准滑动”状态(即在肉眼不可见的显性打滑发生前,滑移率刚开始偏离线性区间的时刻)。
3
那么以上的视觉感知如何匹配动力学感知能力就是关键了。
单纯靠动力学有点类似后知后觉,毕竟是有了力才有反馈。而单纯靠视觉感知,则必须面对幻觉问题,毕竟模型下的视觉能力概率上会有对于corner case的误判。所以要找到科学的整合方式,eTCS 2.0一个合理的整合方法应该符合一种前馈(Feed-forward)+ 闭环(Feedback)的协作模式。
即,视觉感知提供预瞄策略:在车辆进入某段路面前,视觉系统告知中央计算平台,前方2米是35°碎石坡,附着力预计下降40%,后轴悬挂k系数调高,且前后轮附着力在比例上有差异。此时,易四方系统就会据此提前调整四轮扭矩分配权重。而动力学方案提供一种实时修正的闭环能力:当轮胎真正触地,动力学传感器就可以以更高频率验证视觉的预判。如果实际测量的滑移率与视觉感知的预判不符,动力学测量结果就会接管,重新计算每个轮端的滑移率限值。
大体如此吧,当前只是个实现上的深浅问题。但走电驱越野的技术路线,还是具有极高科技价值的。以电为主的控制回路,包括悬挂和驱动,在地形通过率、能耗效率上,还有很多潜力可挖。
#极致性能造就极致体验