如何解释加速抬头和制动点头?
很多人把加速抬头、制动点头归结为惯性,这个方向没错,但工程上真正有用的理解要再往下走一步:车身为什么会绕横向轴转动,前后轮法向载荷怎样变,悬架为什么有的车一下就收住、有的车会来回晃。
先把变量放清楚。设整车质量为 ,轴距为
,质心高度为
,车辆纵向加速度为
。这里约定
表示加速,制动时
。忽略空气阻力和坡度时,前后轴之间的动态载荷转移量近似为
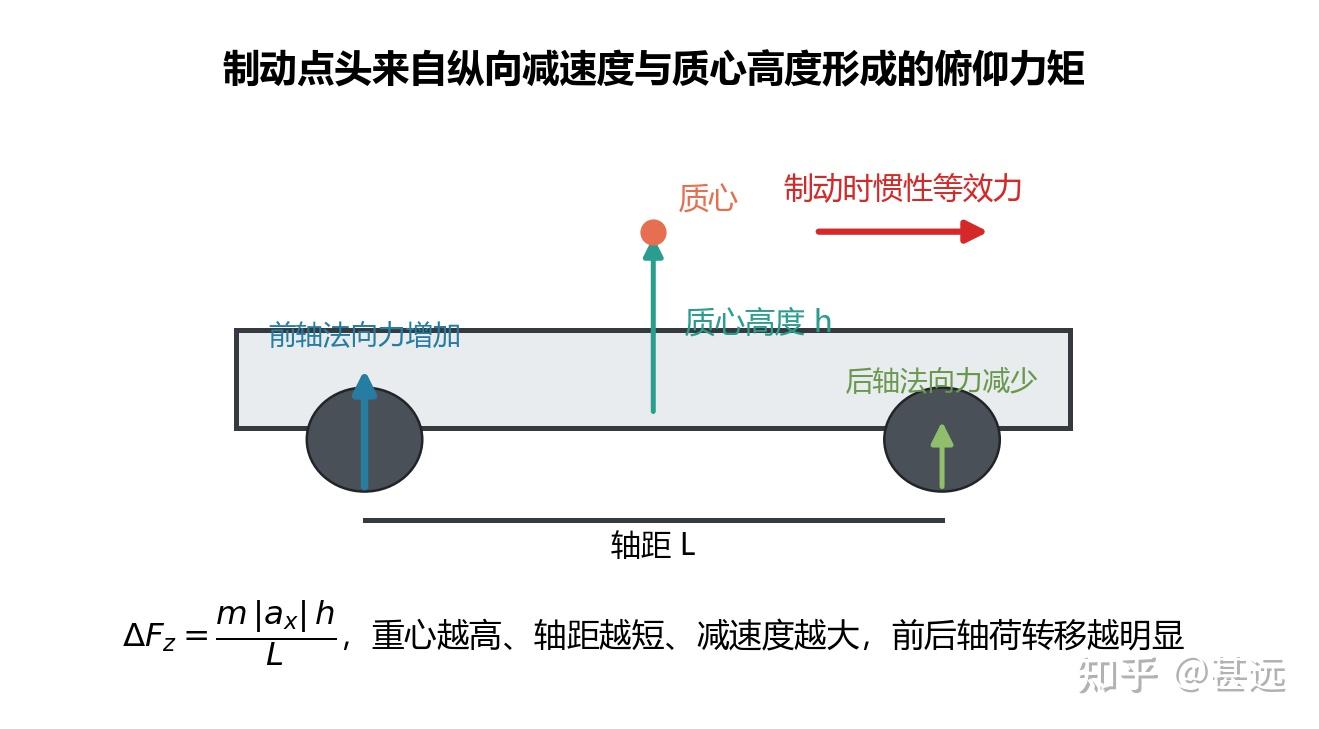
这个式子很短,却把点头和抬头的主要来源说清楚了:同样的制动强度,车越重、质心越高、轴距
越短,前后轴荷变化越大。制动时前轴法向力增加、后轴法向力减少;加速时方向相反,后轴法向力增加、前轴法向力减少。
【图1:制动时纵向减速度和质心高度形成俯仰力矩,前轴法向力增加,后轴法向力减少。】
这还不是完整答案。轴荷转移解释了轮胎受力怎么变,车身“点一下”或“仰一下”还要经过悬架和车身俯仰模态。可以把车身近似看成绕质心做小角度俯仰的二阶系统,俯仰角为 ,等效转动惯量为
,俯仰阻尼为
,俯仰刚度为
,则有
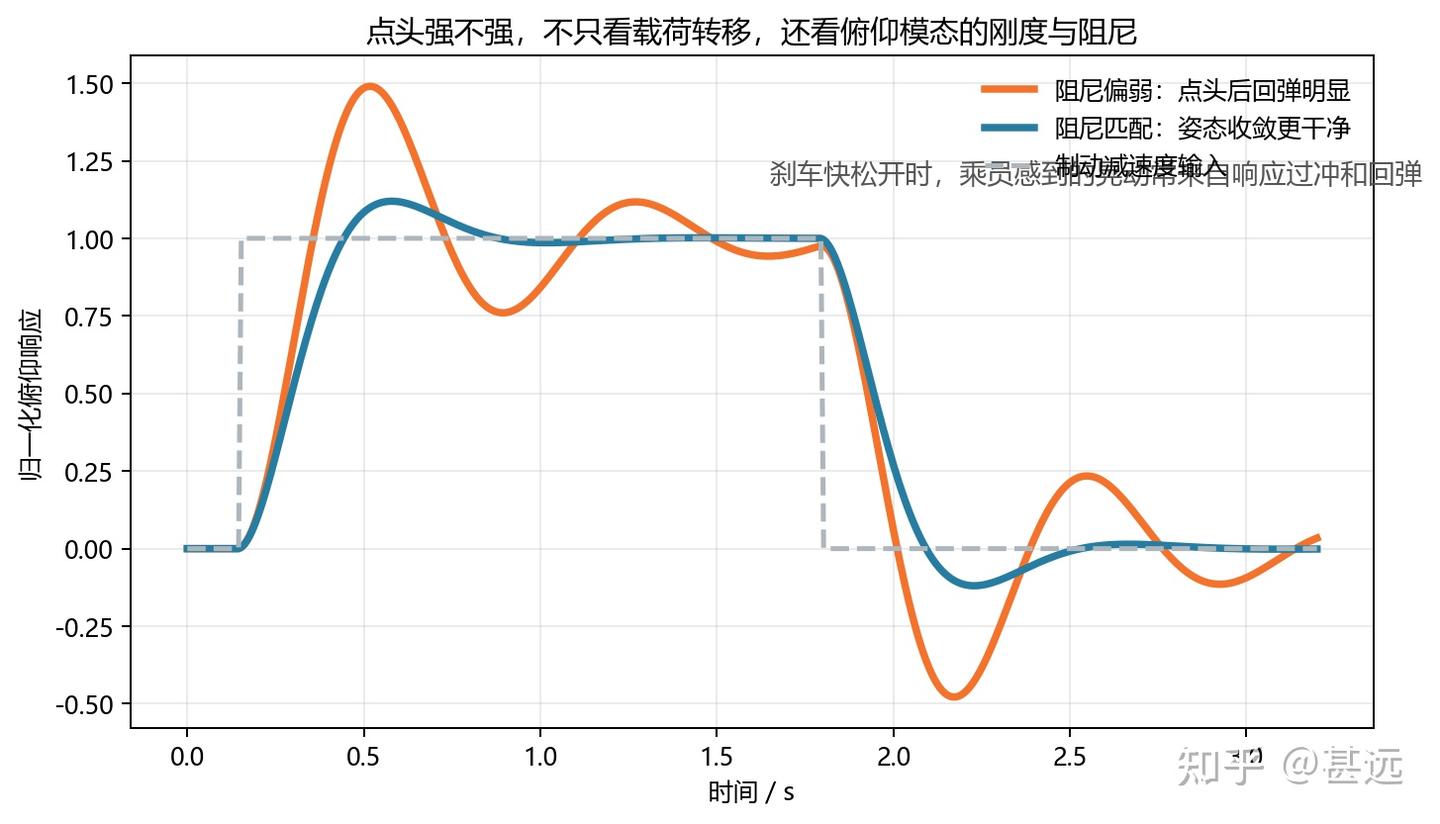
其中 主要来自纵向惯性力和轮胎接地点反力形成的力矩。对日常驾驶来说,刹车踩得越突然,
的上升沿越陡,车身俯仰响应就越容易有过冲;阻尼偏弱时,松刹车之后还会回弹,乘员体感就是“前后晃”。
【图2:同样的制动输入下,阻尼偏弱会带来更明显的点头和回弹,阻尼匹配时姿态收敛更快。】
做一个数量级估算会更直观。假设一辆车 ,
,
,紧急制动达到
,则
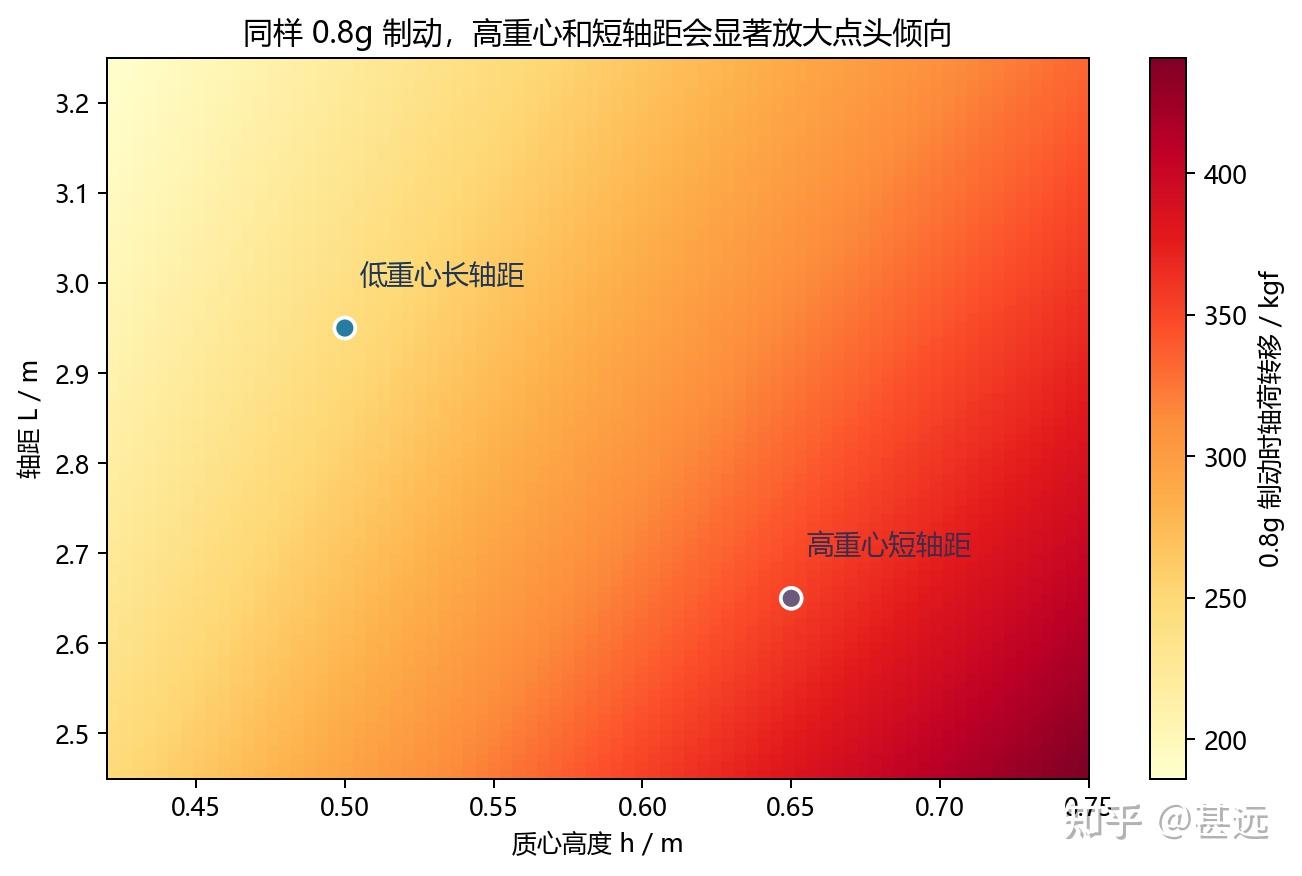
这意味着一次较强制动中,大约有接近三百公斤力的法向载荷从后轴转移到前轴。前轮更“压实”,后轮更容易接近抱死或触发稳定控制,所以制动力分配、ABS、EBD 都不是单纯为了缩短距离,也是在管理动态轴荷。
【图3:同样 0.8g 制动下,质心高度越高、轴距越短,轴荷转移越大,点头倾向也更明显。】
加速抬头也是同一套力学,只是方向换了。前驱车大油门时前轴卸载会削弱前轮附着,容易响胎或触发牵引力控制;后驱车加速时后轴被压实,驱动轮附着会更有利。电动车因为电机扭矩响应快,如果踏板映射和悬架阻尼没有处理好,低速起步时的抬头感会比账面加速度更先被乘员感知到。
工程上减轻点头和抬头通常不是把悬架一味做硬。悬架更硬可以减小静态俯仰角,但也可能把路面冲击直接传进车身。更成熟的做法是综合调 、
、制动踏板建压斜率、再生制动与液压制动衔接、悬架 anti-dive/anti-squat 几何,以及车身控制策略。底盘调校追求的不是完全没有姿态,而是载荷转移可预测、俯仰响应不过冲、收敛干净,轮胎还能保持足够的接地余量。
所以,制动点头和加速抬头不是某一种车才有的问题,而是所有四轮车辆都绕不开的纵向动力学现象。区别只在于:有些车把载荷转移、悬架模态和控制策略协调得比较好,乘员只感觉到车在稳稳减速;有些车把同样的物理过程放大成了明显的点头、回弹和晕车感。