
RCVD-CHAPTER 20:Driving and Braking
This chapter starts with some historical information that was originally written by Bill Close, MRA, in a white paper called “Front Drive Performance Applications,” for Chevrolet Race Shop (now GM Motorsports Technology). Some of the interpretation of differential operation came from discussions with Terry Satchell.
本章开头的一些历史信息最初由 MRA 的 Bill Close 在为雪佛兰赛车商店(现为通用汽车赛车技术部)撰写的白皮书《前驱性能应用》中撰写。关于差速器工作原理的部分解释来自于与 Terry Satchell 的讨论。
Introduction
As is obvious by now, this book is primarily concerned with the turning behavior of vehicles. This chapter concentrates on the mechanical components involved with longitudinal acceleration (and deceleration). Certainly driving and braking are a very important part of the “g-g” diagram. The chapter starts with a discussion of the merits of different drive types—front-, rear-, and four-wheel drive, goes into detail on drive axle differentials, and concludes with some basic information on brakes.
显而易见,本书主要关注车辆的转弯行为。本章重点讨论与纵向加速(和减速)相关的机械部件。当然,驱动和制动是“g-g”图中非常重要的部分。本章首先讨论不同驱动类型——前驱、后驱和四驱的优缺点,然后详细介绍驱动桥差速器,最后介绍一些制动系统的基本知识。
20.1 Merits of Front-, Rear-, and Four-Wheel Drive 前驱、后驱和四驱的优缺点
Front-, rear-, and four-wheel drive have all been used on successful racing cars at different times and under different rules and operating conditions. This section gives a historical overview of each drive type and reasons favoring its use under certain conditions. The material is general; a detailed technical look at this subject is for another book.
前驱、后驱和四驱都曾在不同时期、不同规则和不同工况下被成功的赛车所使用。本节概述了每种驱动类型的历史,以及在某些条件下支持使用它们的理由。内容是一般性的;对这个主题的详细技术探讨需要另一本书来展开。
Front-Wheel Drive 前轮驱动
The current popularity of front-wheel drive in passenger cars might suggest that this drive concept is a relatively new one. This is hardly the case. Some historians point to the Cugnot steam carriage of 1770 as the first application of the front-drive system.
前轮驱动目前在乘用车中的普及可能会让人认为这种驱动概念相对较新。但事实并非如此。一些历史学家指出,1770 年的古诺蒸汽汽车是前驱系统的首次应用。
Walter Christie appears as the front-drive pioneer (circa 1904-09). His race cars were powered by huge engines in various configurations with powers approaching 100 bhp. The slow-turning engines were located transversely such that the drive was taken directly off the two ends of the crankshaft through a flywheel/clutch and universal joint to each wheel. The clutches performed the differential function. The machines were used for record attempts in dirt track racing and in several road races. One of the machines is responsible for the term “plow” which is so frequently used to describe the limit understeer of FWD competition cars. Barney Oldfield driving a Christie in a dirt track competition literally “plowed” two wide ruts in the track as he accelerated out of a turn! Recommended reading for those interested in early FWD is Ref. 53.
Walter Christie 似乎是前驱的先驱(约 1904-09 年)。他的赛车由各种配置的大功率发动机驱动,功率接近 100 马力。这些低转速发动机横向布置,驱动力通过飞轮/离合器和万向节直接从曲轴两端传递到每个车轮。离合器起到了差速器的作用。这些机器用于泥土赛道比赛和几项公路赛的记录尝试。其中一台机器贡献了“推头(plow)”这个术语,该术语经常被用来描述前驱赛车在极限状态下的不足转向。Barney Oldfield 驾驶 Christie 赛车参加泥土赛道比赛,在加速出弯时真的在赛道上“犁”出了两条宽沟槽!对早期前驱感兴趣的读者推荐阅读参考文献 53。
A number of front-drive Millers competed at Indy in the period 1924-34 including two wins with 151 cu. in. engines and one with a 220 cu. in. engine of about 200 bhp (1934). The cars were reported to have strong dropped throttle oversteer, and for this reason were consistently more successful on the high-banked board tracks at steady high speeds.
在 1924-34 年间,一些前驱 Miller 赛车参加了印地比赛,其中两次使用 151 立方英寸发动机获胜,一次使用约 200 马力的 220 立方英寸发动机(1934 年)。据报道,这些赛车在收油时有强烈的过度转向趋势,因此它们在高速稳定的高倾斜木质赛道上的表现始终更为成功。
In 1947-50 the Blue Crown Specials with 270 bhp Offy engines achieved three firsts and three seconds at Indy. These cars ran on hi-test aviation gasoline reducing pit stops when compared to alcohol-burning cars. They were light, reliable machines with some 65% of the weight on the front wheels. Since then no front-drive car has won Indianapolis, nor have any appeared in the first three places since 1950. The famous FWD Novi which appeared in 1946 was reported to produce over 500 bhp. Although it was extremely fast and established lap records, it suffered from tire wear, fuel consumption and handling problems. One fatal accident with this machine was apparently due to limit understeer.
在 1947-50 年间,配备 270 马力 Offy 发动机的 Blue Crown Specials 在印地取得了三次第一和三次第二。这些赛车使用高标号航空汽油,与使用酒精燃料的赛车相比减少了进站次数。它们是轻便可靠的机器,约 65% 的重量落在前轮上。自那时起,没有前驱赛车赢得过印地比赛,自 1950 年以来也没有任何前驱赛车进入过前三名。1946 年出现的著名前驱 Novi 据报道可产生超过 500 马力。虽然它速度极快并创造了单圈记录,但它存在轮胎磨损、燃油消耗和操控性问题。该赛车发生的一起致命事故显然是由于极限状态下的不足转向。
The Saab FWD appeared in 1955, the first automotive product of the Swedish aircraft firm. It was to become popular for winter driving under low-coefficient conditions and performed extremely well in long-distance rallying with such drivers as Erik Carlsson using his hand brake technique for corner entry. Following the Saab, the English Mini has been very successful in rallying and also in small displacement sedan racing.
萨博前驱车于 1955 年问世,是这家瑞典飞机制造公司的首个汽车产品。它在低附着系数条件下的冬季驾驶中广受欢迎,并在长距离拉力赛中表现出色,车手 Erik Carlsson 使用他的手刹技术进行入弯。继萨博之后,英国 Mini 在拉力赛和小排量轿车比赛中也非常成功。
From this brief history of front-wheel-drive race cars the following conclusions may be drawn:
从前轮驱动赛车的这段简短历史中可以得出以下结论:
- Front drive has been most successful in the lower power/weight range and in situations in which superior directional stability on low coefficients is important. There has never been a successful front-drive Grand Prix car nor a competitive Indianapolis car of more than 300 hp.
- 前驱在较低的功率/重量范围内以及在低附着系数下优越的方向稳定性很重要的情况下最为成功。从未有过成功的前驱大奖赛赛车,也没有出现过超过 300 马力的具有竞争力的印地赛车。
- In straight-line acceleration, the load on the front wheels is reduced by the longitudinal load transfer. This leads to the use of forward static weight bias to control wheel spin at the lower speeds in the lower gears. The situation is aggravated in higher-powered, lighter vehicles and may require 60-70% (or more) of the static weight on the front wheels. A limited-slip differential may be desirable to control the lightly loaded wheel under combined cornering/acceleration (turn exit) but this may induce undesirable steering forces and generally interfere with control feedback to the driver. Some success is now found with the viscous type of limited slip.
- 在直线加速时,前轮上的载荷因纵向载荷转移而减小。这导致需要使用前偏的静态重量分配来控制低速低档位时的车轮空转。在功率更高、重量更轻的车辆上,这种情况会加剧,可能需要将 60-70%(或更多)的静态重量放在前轮上。在转弯/加速联合工况(出弯)下,可能需要限滑差速器来控制轻载车轮,但这可能会引起不期望的转向力,并通常会干扰传递给驾驶员的控制反馈。目前粘性限滑差速器取得了一些成功。
- Forward weight bias combined with tractive effort on the front tends to induce excessive understeer in the linear range, plow at the limit (in steady-state), and reduced max lateral. This is due to tire load sensitivity and friction circle effects and is most noticeable on acceleration out of turns. The understeer/plow may be reduced by stickier tires on the front and by taking some of the lateral load transfer on the rear. The amount of LLTD on the rear is limited by lift of the inside rear wheel.
- 前偏的重量分配加上前轮上的牵引力往往会导致线性范围内过度不足转向、极限状态(稳态)下推头以及最大侧向加速度降低。这是由于轮胎载荷敏感性和摩擦圆效应所致,在出弯加速时最为明显。可以通过在前轮使用更粘的轮胎以及让后轮承担一部分横向载荷转移来减少不足转向/推头。后轮上的横向载荷转移分配量受到内侧后轮抬起的限制。
- The forward weight bias is basically unfavorable to maximum braking because of tire load sensitivity losses due to unequal front and rear loading. The situation is improved if larger tires are used on front. Proportionally more rear brake (or even lockup of the rear tires) is one technique which has been used to get the tail out for promoting “turn-in” and rear slip angle for cornering. It has been used in various forms such as the so-called “hand-brake turn” (popular in rallying) and “trail braking” where the left foot is used for braking and the right foot remains on the throttle to keep the front wheels from locking up.
- 前偏的重量分配基本上不利于最大制动性能,因为前后载荷不均会导致轮胎载荷敏感性损失。如果前轮使用更大的轮胎,情况会得到改善。使用比例更大的后轮制动(甚至抱死后轮)是一种用来甩尾以促进“入弯”和获得转弯所需后轮侧偏角的技术。该技术以各种形式被使用,例如所谓的“手刹转弯”(在拉力赛中流行)和“循迹制动”,后者用左脚制动,右脚保持在油门上以防止前轮抱死。
- Trim changes occur frequently in circuit racing, for example, if balked by another competitor in a turn. Dropped throttle transfers load forward, increases the inward lateral force on the front wheels, and increases the size of the tire circle diagram on front. A destabilizing moment is created with a magnitude depending on the amount of engine motoring torque (note that with an automatic transmission, motoring torque at the wheels may be very small). If the vehicle is stable it will retrim without control action at a higher lateral acceleration. If near the limit it may spin out if not caught by control action. As Reid Railton pointed out, when a front drive is loose and near incipient spin the best treatment may be to ease on the throttle and transfer load aft, but “the relief is only temporary.” Driving a high-powered front drive at the limit requires more judgment and experience, as the Novi history demonstrates.
- 在赛道比赛中,配平变化频繁发生,例如在弯道中被其他竞争者阻挡时。收油会将载荷向前转移,增加前轮向内的侧向力,并增大前轮上的轮胎摩擦圆尺寸。会产生一个失稳力矩,其大小取决于发动机倒拖扭矩的量(注意,对于自动变速箱,车轮处的倒拖扭矩可能非常小)。如果车辆是稳定的,它将在不进行控制操作的情况下以更高的侧向加速度重新配平。如果接近极限,若不通过控制操作纠正,可能会发生甩尾。正如 Reid Railton 所指出的,当前驱车操控松散且接近甩尾初期时,最好的处理方式可能是松开油门并将载荷向后转移,但“这种缓解只是暂时的”。如 Novi 的历史所示,在极限状态下驾驶大功率前驱车需要更多的判断力和经验。
In summary, it is more difficult to achieve a neutral vehicle over the operating range with front-wheel drive than with rear- or four-wheel drive. The compromises required to achieve a balance of handling and performance over a circuit are critical. The situation becomes progressively more difficult as power is increased.
总之,与后驱或四驱相比,使用前驱在整个工作范围内实现中性车辆更加困难。为了在赛道上实现操控和性能的平衡,所需的折衷是至关重要的。随着功率的增加,情况变得越来越困难。
FWD cars have appeared with a variety of engine/transmission arrangements, for example:
前驱车出现过多种发动机/变速箱布置方式,例如:
- Longitudinal engine, behind differential
- 纵置发动机,位于差速器后方
- Longitudinal engine, in front of differential
- 纵置发动机,位于差速器前方
- Longitudinal engine, above differential
- 纵置发动机,位于差速器上方
- Transverse engine, above transmission
- 横置发动机,位于变速箱上方
- Transverse engine, in line with transmission
- 横置发动机,与变速箱对齐
The choice of any one type over another probably is a question of packaging and possibly weight distribution.
选择哪一种类型可能是布局问题,也可能是重量分配问题。
Rear-Wheel Drive 后轮驱动
Rear-wheel drive is by far the most successful in racing. The combination of front-wheel steering and rear-wheel drive gives the driver control over both ends of the vehicle, by “steering with the throttle.”
后轮驱动目前是赛车中最成功的驱动形式。前轮转向与后轮驱动的组合使驾驶员能够通过“用油门控制转向”来操控车辆的两端。
When compared with the front-wheel drive above, the rear drive is more compromised for control rather than stability.
与上述前轮驱动相比,后轮驱动在控制性方面做出的妥协多于稳定性方面。
With respect to high power, large tires can be fitted to a rear drive more easily (packaging FWD includes wheel clearance at steering lock).
就大功率而言,后驱车更容易安装大尺寸轮胎(前驱车的布置需要考虑转向锁止时的车轮间隙)。
With dropped throttle trim change, the reaction to more front load is always destabilizing. With RWD the removal of road-load driving thrust increases the lateral force potential of the rear tires and is a stabilizing effect, opposing the destabilizing moment.
在收油配平变化时,前轮载荷增加的反应总是失稳的。对于后轮驱动,取消道路载荷的驱动力会提高后轮胎的侧向力潜力,产生稳定效果,与失稳力矩相抗衡。
RWD cars are available with a variety of engine/transmission arrangements, for example:
后驱车有多种发动机/变速箱布置方式,例如:
- Front-mounted longitudinal engine in unit with transmission and driveshaft to the rear
- 前置纵置发动机,与变速箱和后传动轴为一体
- Mid-mounted longitudinal engine, otherwise as above
- 中置纵置发动机,其余同上
- Forward-mounted longitudinal engine with engine-speed propshaft to rear-mounted transaxle
- 前置纵置发动机,通过发动机转速传动轴连接后置变速箱-差速器总成
- Mid/rear transverse engine with unit-mounted transaxle
- 中/后置横置发动机,与变速箱-差速器总成一体
- Mid-mounted longitudinal engine in unit with transaxle
- 中置纵置发动机,与变速箱-差速器总成一体
- Rear-mounted longitudinal engine in unit with transaxle
- 后置纵置发动机,与变速箱-差速器总成一体
Four-Wheel Drive 四轮驱动
Four-wheel-drive race vehicles have had the most success off-road and on low-coefficient surfaces, especially with very high power. A recent example is the domination of stage rallying and Pikes Peak by 4WD turbocharged cars.
四轮驱动赛车在越野和低附着系数路面上最为成功,尤其是在功率非常高的情况下。最近的一个例子是四驱涡轮增压汽车在拉力赛段和派克峰爬山赛中的统治地位。
On paved surfaces, 4WD has been less successful and some probable reasons are:
在铺装路面上,四驱的成功率较低,可能的原因有:
- At all but the lowest speeds, modern race tires have been able to develop enough grip to eliminate wheel spin. In dragsters, 4WD was common for a brief period before the development of cars with rear weight bias (resulting in little tractive contribution from the front tires).
- 除了最低速度外,现代赛车轮胎已经能够产生足够的抓地力来消除车轮空转。在直线加速赛车中,四驱在出现后轮重量偏置(导致前轮牵引贡献很小)的赛车之前曾短暂流行过。
- 4WD adds a weight penalty and weight is extremely important, both for the obvious reason of power-to-weight ratio for acceleration and also tire load sensitivity.
- 四驱会增加重量,而重量对于加速的功率重量比以及轮胎载荷敏感性都是极其重要的。
- With fixed torque split (near 50% each end) 4WD, the car attitude cannot be changed easily with the throttle. This calls for special driving technique. Some 4WD Grand Prix cars have been built with variable torque split center differentials. In these cars the driver’s tendency is to reduce the front wheel percentage as much as possible, at which point the traction advantages of 4WD become questionable, even at low speed.
- 对于固定扭矩分配(前后近 50%)的四驱,汽车姿态不易通过油门改变。这需要特殊的驾驶技术。一些四驱大奖赛赛车采用了可变扭矩分配的中央差速器。在这些赛车上,驾驶员的倾向是尽可能降低前轮的比例,此时四驱的牵引优势就变得值得怀疑了,即使在低速下也是如此。
4WD cars have been built with front, mid and rear engines and a wide variety of transmission and final drives. The most successful seem to have been symmetrical front to rear in terms of weight distribution, suspension type, tires, etc.
四驱赛车有前置、中置和后置发动机,以及各种变速箱和主减速器。最成功的似乎是在重量分配、悬架类型、轮胎等方面前后对称的。
The choice of differential type(s) greatly influences the handling of 4WDs. For racing applications it has often been found that locking out the center differential gives the best results. Front differentials are limited to open or possibly the viscous limited-slip types to avoid steering problems. Rear differentials are often limited-slip types.
差速器类型的选择极大地影响四驱车的操控性。对于赛车应用,通常发现锁止中央差速器能带来最佳效果。为避免转向问题,前差速器仅限于开放式或可能使用粘性限滑类型。后差速器通常是限滑类型。
20.2 Differentials 差速器
This section begins with a brief discussion of the utility of differentials. It continues with mechanical and operational descriptions of several common types that are used in racing including:
本节首先简要讨论差速器的用途。然后对赛车中使用的几种常见类型进行机械和操作方面的描述,包括:
- Open differential
- 开放式差速器
- Locked (spool)
- 锁止式(整体式)
- Various limited-slip units including:
- 各种限滑单元,包括:
- Torsen®
- Torsen®
- Dana Trak-Loc (Corvette)
- Dana Trak-Loc(克尔维特)
- Salisbury type
- Salisbury 型
- Viscous differentials
- 粘性差速器
- Electronic traction control (and variants)
- 电子牵引力控制(及其变体)
Finally, interaction of the differential with other aspects of race car set-up are discussed.
最后,讨论差速器与赛车调校其他方面的相互作用。
The modern differential was invented in 1827 by Pecquer (Ref. 99) and was first used on steam traction engines for the same reason that it is still used—cornering with the drive wheels mounted on a single shaft (spool) requires tire slip, especially on tight turns. Another solution to the problem, used on some pioneer autos, was one-wheel drive. The very-low-power GM SunRayder solar-electric race car is a successful modern example of one-wheel drive; eliminating the differential in this car saved weight and reduced drive-line complexity.
现代差速器由 Pecquer 于 1827 年发明(参考文献 99),并首次用于蒸汽牵引车,其原因与现在仍然使用差速器的原因相同——使用安装在单轴(整体式)上的驱动轮转弯需要轮胎滑动,尤其是在急弯时。一些早期汽车使用的另一种解决方案是单轮驱动。低功率的通用汽车 SunRayder 太阳能电动赛车就是单轮驱动成功的现代例子;取消差速器减轻了重量并降低了传动系统的复杂性。
Some reasons for fitting a differential are to lower the power required when turning, reduce the turning circle for given steer angle, and to permit smooth low-speed operation.
安装差速器的一些原因是:降低转弯时所需的功率、减小给定转向角下的转弯半径,并实现平稳的低速运行。
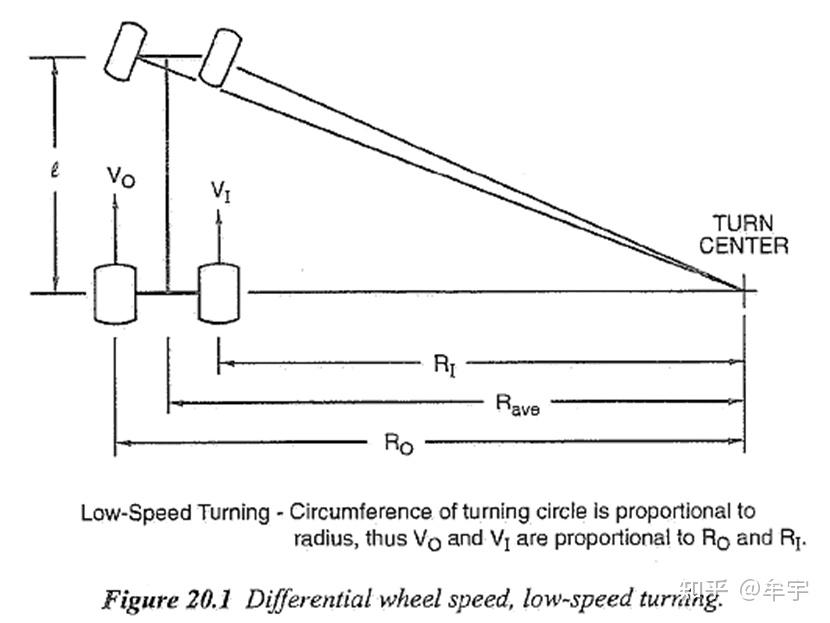
The geometry of low-speed turning is shown in Figure 20.1, and a first approximation to the amount of tire slip induced (for a locked axle) is given by the ratio of the outside wheel turning radius to the inside wheel turn radius or approximated by the ratio of the track width to the corner radius:
低速转弯的几何关系如图 20.1 所示,对于锁止车轴,引起的轮胎滑动量的一阶近似由外侧车轮转弯半径与内侧车轮转弯半径之比给出,或近似由轮距与转弯半径之比给出:
or it may be approximated as
或者可以近似为

where
其中
V_diff= Difference in apparent road velocity, outside wheel / inside wheel
V_diff= 外侧车轮与内侧车轮的表观路面速度差
R_O= Turn radius, outside wheel
R_O= 转弯半径,外侧车轮
R_I= Turn radius, inside wheel
R_I= 转弯半径,内侧车轮
t= Axle track width (or tread width)
t= 车轴轮距(或胎面宽度)
R_ave= Turn radius, measured to the center of the axle
R_ave= 转弯半径,测量至车轴中心
For a turn with 30-ft. radius and a track width of 5 ft., the speed difference is 32.5/27.5−1=0.18, which might be split up 9% each side with a locked axle. This is well into the sliding/squealing range for most tires.
对于半径为 30 英尺、轮距为 5 英尺的转弯,速度差为 32.5/27.5−1=0.18,对于锁止车轴,这可能会分配为两侧各 9%。这已经远超大多数轮胎的滑动/啸叫范围。
The open differential gear cleverly allows the sum of the outside and inside wheel rotational velocities to equal a constant while allowing one wheel to speed up and the other to slow down. Of course, another result of the differential mechanism is that torque is split equally between the two sides and if one wheel loses traction the total drive force available will be just twice the force available from the tire with the least grip. The simple solution is to lock both wheels together, but of course then the low-speed turning problem returns.
开放式差速器齿轮巧妙地使内外侧车轮的转速之和等于一个常数,同时允许一个车轮加速而另一个减速。当然,差速器机构的另一个结果是扭矩在两侧平均分配,如果一个车轮失去抓地力,可用的总驱动力将仅为抓地力最小的轮胎可提供的力的两倍。简单的解决方案是将两个车轮锁在一起,但这样低速转弯的问题就回来了。
All of the mechanical differentials that are currently available fall somewhere along the range from locked axle to open differential. Over the years, many limited-slip designs have been tried to provide a compromise between the low-speed turning / low drag and the high torque / wheel slip operating conditions. There is no magic in differential design; mechanical devices appear to be limited to combinations of these two basic axle types. With the addition of electronic control and computation, there is now a range of new devices that can sense and react to additional variables beyond what is practical with a purely mechanical device. These promise better performance, with the usual trade-off of more complexity.
目前所有可用的机械差速器都介于锁止车轴和开放式差速器之间。多年来,人们尝试了许多限滑设计,以在低速转弯/低阻力和高扭矩/车轮滑动工况之间提供折衷。差速器设计中没有魔法;机械装置似乎仅限于这两种基本车轴类型的组合。随着电子控制和计算技术的加入,现在出现了一系列新装置,它们可以感知和响应纯机械装置无法实现的其他变量。这些装置有望带来更好的性能,但通常需要以更高的复杂性为代价。
Open Differential 开放式差速器
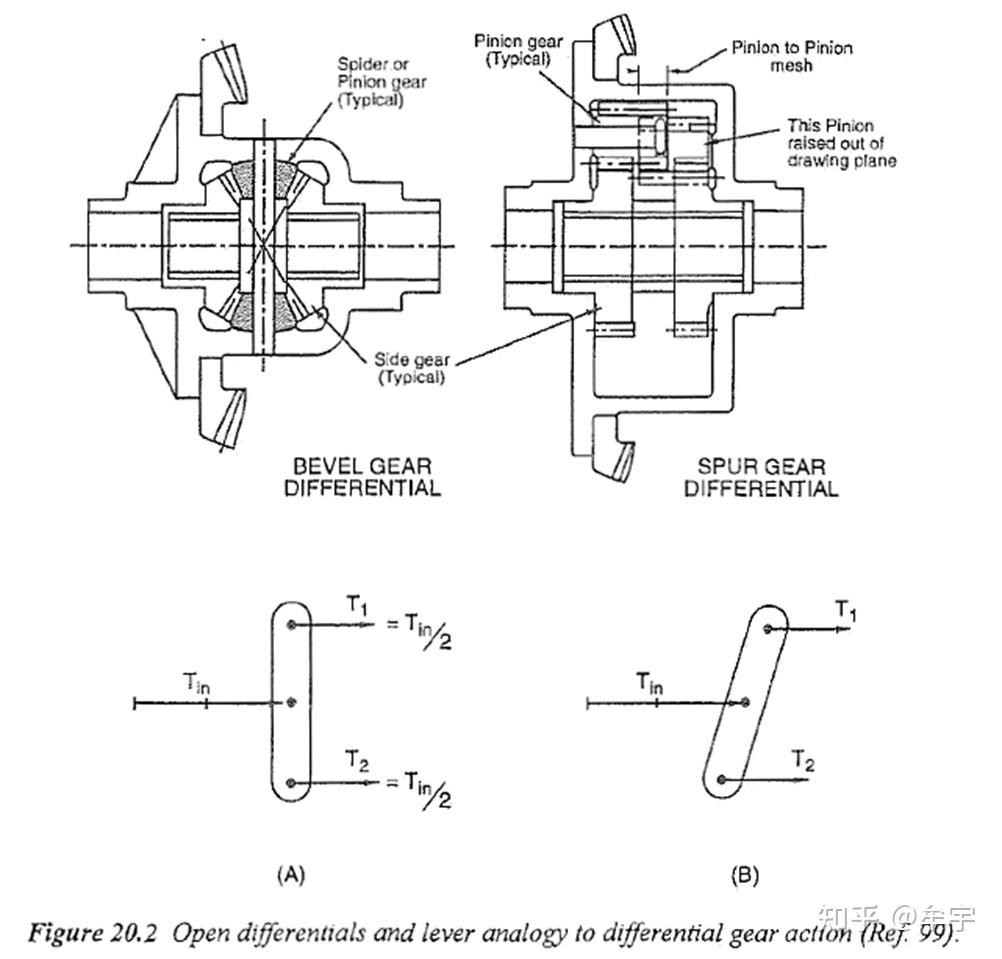
The operation of the open differential is shown schematically in Figure 20.2, next to cutaways of typical bevel and spur gear units. The schematic view is from above and the link represents the differential gear (spider gear) that connects the ring gear carrier (input torque) to the two side gears. Rotation of the link is analogous to spider gear rotation. Note that these diagrams show torque as force-vector-length. The pivots have no friction (for this simple example) and the torque split must be even, both in case (a) and in (b) where the lever is rotated due to differences in output velocity.
开放式差速器的工作原理示意如图 20.2 所示,旁边是典型的锥齿轮和直齿轮装置的剖视图。示意图为俯视图,连杆代表将齿圈支架(输入扭矩)连接到两个半轴齿轮的差速器齿轮(行星齿轮)。连杆的旋转类似于行星齿轮的旋转。注意,这些图表将扭矩表示为力矢量长度。枢轴无摩擦(在此简单示例中),并且在情况(a)和情况(b)(其中杠杆因输出速度差异而旋转)中,扭矩分配必须是均匀的。
The wheel output torques for an open differential are shown by Figure 20.3 which plots:
开放式差速器的车轮输出扭矩如图 20.3 所示,该图绘制了:
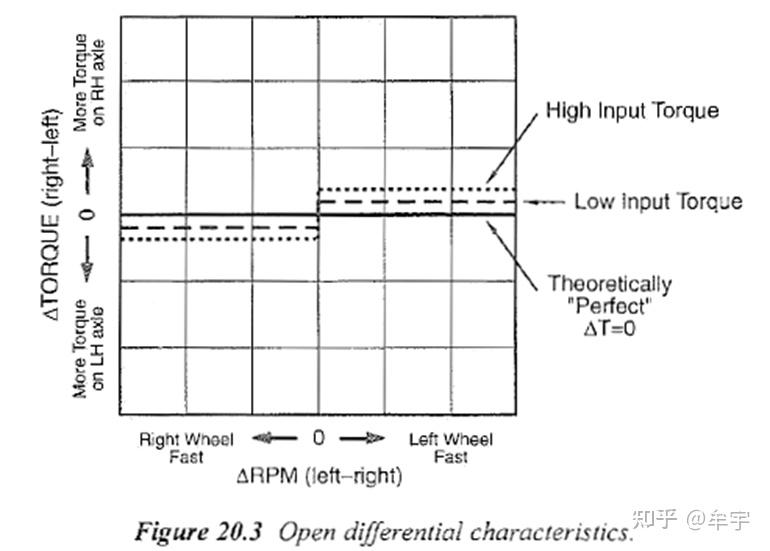
ΔRPM=RPM_left wheel−RPM_right wheel on the x-axis
and
以及
ΔTorque=torque_right−torque_left on the y-axis
In a real open differential there is stick-slip (Coulomb friction) in all the gear meshes and bearings and a small amount of hydraulic damping (proportional to velocity or velocity squared) due to oil churning. This is shown in Figure 20.3 which shows a small step in ΔTorque at the point of fast-slow wheel reversal (due to the friction), and a very gradual increase in ΔTorque with increase in ΔRPM. The result of the friction is to slightly “lock” the two output shafts to each other. This gives a small offset and slope to the theoretically even torque split. The wheel that gets more torque is always the slower wheel.
在实际的开放式差速器中,所有齿轮啮合和轴承处都存在粘滑(库仑摩擦),并且由于搅油会产生少量的液压阻尼(与速度或速度的平方成正比)。如图 20.3 所示,在快慢轮反转点处(由于摩擦)ΔTorque 有一个小的阶跃,并且 ΔTorque 随着 ΔRPM 的增加而非常缓慢地增加。摩擦的作用是将两个输出轴略微“锁住”在一起。这给理论上均匀的扭矩分配带来了一个小的偏移和斜率。获得更多扭矩的车轮总是转速较慢的那个。
Note that in Figure 20.3 there are two curves for high and low engine input torque. The difference between these two curves depends on the design of the differential; an increase in friction may occur with an increase in torque. One possible mechanism for this effect is distortion of the differential case with high torque, resulting in binding of the bearings.
注意,图 20.3 中有两条曲线,分别对应高发动机输入扭矩和低发动机输入扭矩。这两条曲线之间的差异取决于差速器的设计;扭矩增加可能会导致摩擦力增加。这种效应的一种可能机制是高扭矩导致差速器壳体变形,从而导致轴承卡滞。
As mentioned in the introduction to this section, the disadvantage of open differentials is that with high power and/or low traction, the drive force at the road is limited by the tire with less traction. For low-speed operation in snow/mud, a simple solution is to partially apply the parking brake (assuming that the parking brake is on the drive axle!). This increases input torque and more total driving force will be delivered to the ground.
如本节引言所述,开放式差速器的缺点是在高功率和/或低牵引力的情况下,路面的驱动力受限于牵引力较小的轮胎。在雪地/泥地低速行驶时,一个简单的解决方案是部分施加驻车制动(假设驻车制动作用于驱动桥!)。这会增加输入扭矩,从而有更多的总驱动力传递到地面。
Another solution to the lack of traction with an open differential is to partially lock the two axles by increasing internal friction, perhaps by preloading some of the journal bearings (typically the spider gears). Now the slow wheel receives more torque and the fast wheel less torque. Referring back to Figure 20.3, extra friction will increase the size of the step in torque at the fast-slow wheel reversal point. This increase in friction will generate excess heat when the wheel speeds differ (in cornering) and some means of cooling may be required for heavy-duty usage.
解决开放式差速器牵引力不足的另一个解决方案是通过增加内部摩擦来部分锁止两个半轴,例如通过预紧一些滑动轴承(通常是行星齿轮)。这样,慢轮获得更多扭矩,快轮获得更少扭矩。回到图 20.3,额外的摩擦会增加快慢轮反转点处扭矩阶跃的大小。当车轮速度不同时(转弯时),这种摩擦增加会产生过多热量,对于重型使用可能需要某种冷却方式。
In racing, various tricks have been used to good advantage when open differentials are mandated. Of course, the tech inspectors have caught on and will check that the wheels counter-rotate freely with the drive wheels jacked off the ground.
在赛车中,当规定使用开放式差速器时,各种技巧被用来取得优势。当然,技术检查员已经意识到这一点,并会检查驱动轮离地时车轮是否能够自由反向旋转。
The open differential, with or without some added friction, is likely to be with us for many more years. Its strengths are in situations where rolling resistance is important (high-speed turning) and high torque / low gear / wheel spin are not problems.
开放式差速器,无论是否添加一些摩擦,很可能还会伴随我们很多年。它的优势在于滚动阻力很重要(高速转弯)且高扭矩/低档位/车轮空转不成问题的情况。
Open differentials probably have the least effect on handling of any of the various types because they cannot contribute yaw moments (from left-right thrust imbalance) to the vehicle under any circumstances, either power-on or power-off. In situations where traction is broken, the inside wheel acts as a “safety valve” when it spins up. Under these circumstances, the outside wheel maintains some lateral force capability.
开放式差速器可能对各种类型中操控性的影响最小,因为无论在踩油门还是收油的情况下,它们都无法对车辆贡献(由左右推力不平衡引起的)横摆力矩。在牵引力被打破的情况下,内侧车轮在空转时起到“安全阀”的作用。在这种情况下,外侧车轮保持一定的侧向力能力。
Open Differential with Uneven Torque Split 开放式差速器(不均匀扭矩分配)
Referring back to the simple lever diagram of Figure 20.2, if T_in is moved upward, as the left side of Figure 20.4, T_1 at the top will be greater than T_2 at the bottom. In this case the two output torques will vary by the inverse of the ratio of the lever lengths.
回顾图20.2的简单杠杆图,如果将 T_in 向上移动,如图20.4左侧所示,顶部的 T_1 将大于底部的 T_2。在这种情况下,两个输出扭矩将按杠杆长度比的反比变化。
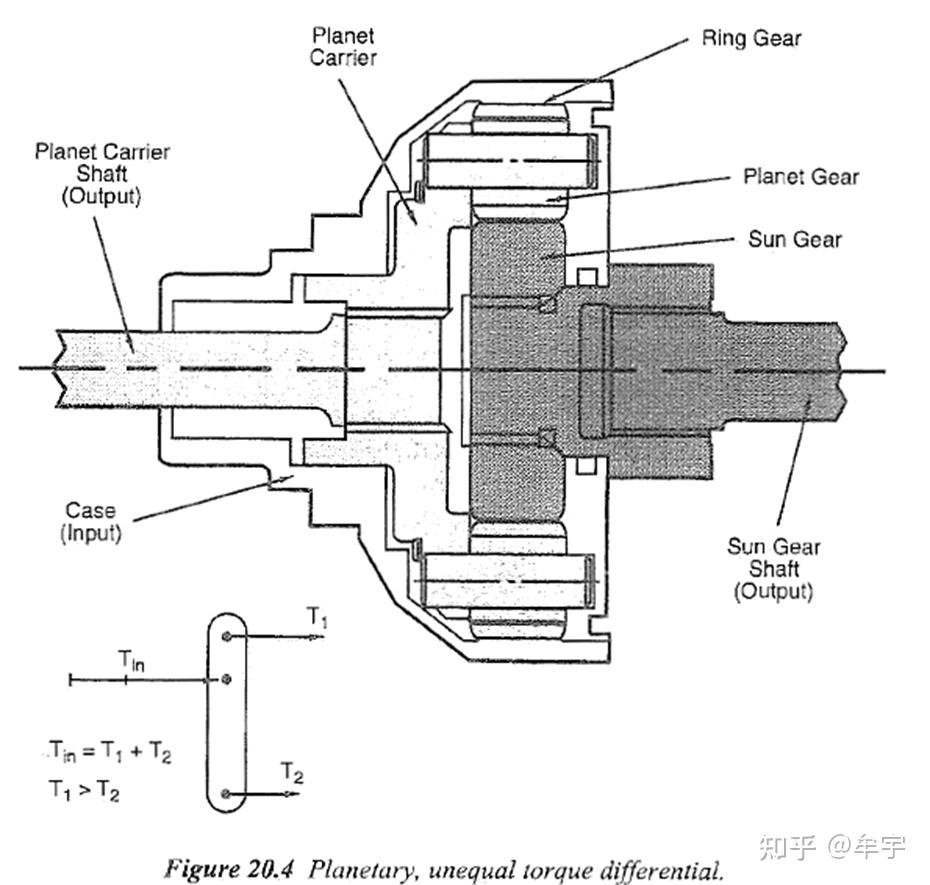
Conventional bevel gearset differentials require that the spider gears rotate between side gears of equal size and this precludes the unequal lever arm design. There are, however,
传统的锥齿轮组差速器要求行星齿轮在尺寸相等的半轴齿轮之间旋转,这排除了不等长力臂的设计。然而,
many other configurations of gears that give differential action. For example, planetary gearset differentials as shown in Figure 20.4 allow the two output “lever” lengths to be unequal. This is the basis for the uneven torque split differentials that may be found in the center location of four-wheel-drive cars.
还有许多其他配置的齿轮也能实现差速作用。例如,如图20.4所示的行星齿轮组差速器允许两个输出“力臂”长度不相等。这就是在四轮驱动汽车中央位置可能发现的不均匀扭矩分配差速器的基础。
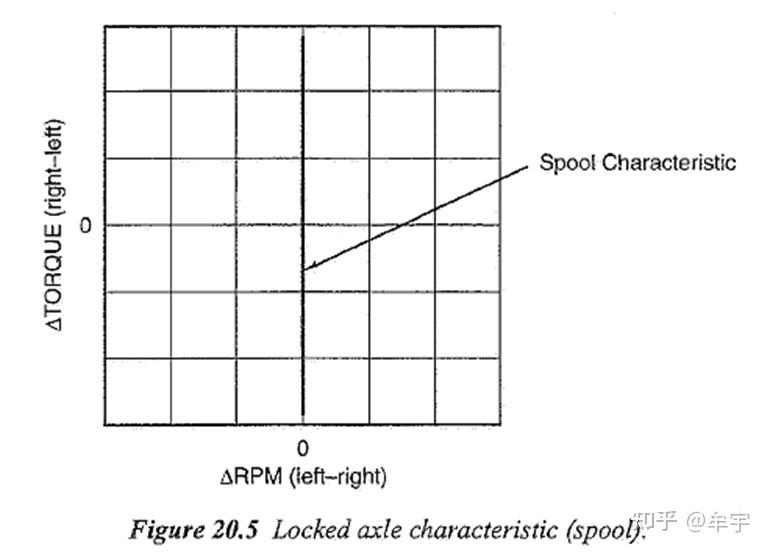
Locked Axle (Spool) 锁止式车轴(整体式)
A plot of locked axle behavior is shown in Figure 20.5. There is no uncertainty in rpm when both sides are locked together. The torque split to the two wheels is determined by a variety of tire-related factors such as radius of turn (of whole vehicle), revs/mile (circumference of tires), load, and lateral force / friction circle effects. Tire traction characteristics are nonlinear (similar to the lateral force characteristics discussed in Chapter 2) and it is very difficult to determine the torque split at any given operating condition.
锁止式车轴的行为如图20.5所示。当两侧锁止在一起时,转速没有不确定性。分配给两个车轮的扭矩由多种轮胎相关因素决定,例如(整车)转弯半径、每英里转数(轮胎周长)、载荷以及侧向力/摩擦圆效应。轮胎牵引特性是非线性的(类似于第2章讨论的侧向力特性),因此很难确定任何给定工作条件下的扭矩分配。
Locked axles are very desirable where traction is poor—low speed / low gear / poor surface operation. The tractive force that the whole axle can deliver is approximately the sum of the grip available at each tire.
锁止式车轴在牵引力较差的情况下——低速/低档位/低附着路面行驶——是非常理想的。整个车轴能够传递的牵引力约等于每个轮胎可用抓地力之和。
Locked axles add a stabilizing yawing moment (tends toward push or understeer). Any attempt to turn the vehicle tries to slow one tire while trying to speed up the other; the resulting moment on the axle is counter to the direction of turn. Unfortunately, the effect decreases with high-speed / large-radius turns. See Chapter 5 for a description of the various moments acting on a car in a turn, including the yaw damping moment.
锁止式车轴会增加一个稳定的横摆力矩(倾向于推头或不足转向)。任何试图使车辆转弯的操作都会试图使一个轮胎减速,同时使另一个轮胎加速;由此产生的车轴力矩与转弯方向相反。不幸的是,这种效应在高速/大半径转弯时会减弱。关于作用在转弯车辆上的各种力矩(包括横摆阻尼力矩)的描述,请参见第5章。
This stabilizing yaw moment comes with a rolling resistance penalty: tight turning scrubs the tires and uses power. Anyone who has pushed cars in the pits knows how much harder it is to push a car with a spool around turns.
这种稳定的横摆力矩伴随着滚动阻力的代价:急转弯会使轮胎侧滑并消耗功率。任何在维修区推过车的人都知道,推一辆装有整体式车轴的汽车转弯要困难得多。
A locked rear axle has a substantial effect on handling and balance, especially at lower speeds where wheel spin is possible. If a car has a spool substituted for an open differential, it typically becomes more understeer in the linear and transitional lateral acceleration ranges of tire performance. This will require more front tire lateral force capability to achieve the same balance. Conversely, a car that is loose may be improved by a spool in the linear and transitional ranges of tire performance.
锁止式后桥对操控和平衡有显著影响,尤其是在可能发生车轮空转的低速情况下。如果一辆汽车用整体式车轴取代开放式差速器,在轮胎性能的线性和过渡侧向加速度范围内,它通常会变得更偏向不足转向。这将需要更大的前轮侧向力能力才能达到相同的平衡。反之,一辆过度转向的汽车在线性和过渡范围内可能会因整体式车轴而得到改善。
However, at the limit of tire performance, under very high power, the spool will cause both wheels to spin simultaneously and cornering capability will be lost. If the drive axle is on the rear, the vehicle will lose most of the stabilizing moment from the rear and get loose (spin) very quickly.
然而,在轮胎性能的极限状态下,在非常高的功率下,整体式车轴会导致两个车轮同时空转,转弯能力将丧失。如果驱动桥在后部,车辆将失去来自后部的大部分稳定力矩,并很快变得过度转向(甩尾)。
If turning is in only one direction, tire stagger (circumference difference left-right) can be used to lower the average rolling drag by “splitting the difference” between equal rpm across the axle while straight-running and while turning. Note that with a load difference (inside to outside wheel), the actual measured static tire circumference probably cannot be directly related to the true revolutions per mile that the tire experiences at speed under power. This explains why stagger numbers are often bigger than simple rolling-distance calculations explain.
如果转弯方向只有一个,可以使用轮胎轮径差(左右周长差),通过在直线行驶和转弯时平衡车轴两侧相同转速下的差异来降低平均滚动阻力。注意,在存在载荷差异(内侧与外侧车轮)的情况下,实际测得的静态轮胎周长可能无法直接与轮胎在有动力情况下高速行驶时的真实每英里转数相关联。这就解释了为什么轮径差数值通常比简单的滚动距离计算所解释的要大。
Limited-Slip Differentials 限滑差速器
In general, limited-slip differentials attempt to compromise between the two extremes of open differential and locked axle. We place devices using mechanical friction in this category.
一般来说,限滑差速器试图在开放式差速器和锁止式车轴这两个极端之间进行折衷。我们将使用机械摩擦的装置归入此类。
*Dana Trac-Loc®
This limited-slip unit is standard equipment on the Chevrolet Corvette. It is shown in Figure 20.6. Clutch packs made of hardened steel plates running in a special lubricant lock the two output shafts together under certain operating conditions. The load on the clutch packs determine the torque bias. Clutch pack load is generated in two ways. First, preload on the clutch packs is provided by Belleville spring washers which are chosen to provide the static breakout torque required at zero input torque. Second, the spider gear / side gear mesh has been carefully designed to add load to the clutch packs as input torque is increased—the gear teeth are specially wedge-shaped for this purpose. There are other variations of this design that use coil springs to provide the preload torque.
这种限滑差速器是雪佛兰克尔维特的标准配置,如图20.6所示。由淬硬钢板组成的离合器组在特殊润滑剂中运行,在特定的工作条件下将两个输出轴锁止在一起。离合器组上的载荷决定了扭矩偏置。离合器组载荷通过两种方式产生。首先,离合器组的预紧力由贝氏弹簧垫圈提供,这些垫圈经过选择以提供在零输入扭矩下所需的静态脱开扭矩。其次,行星齿轮/半轴齿轮的啮合经过精心设计,随着输入扭矩的增加,会向离合器组增加载荷——齿轮齿为此专门设计成楔形。这种设计还有其他变体,使用螺旋弹簧来提供预紧扭矩。
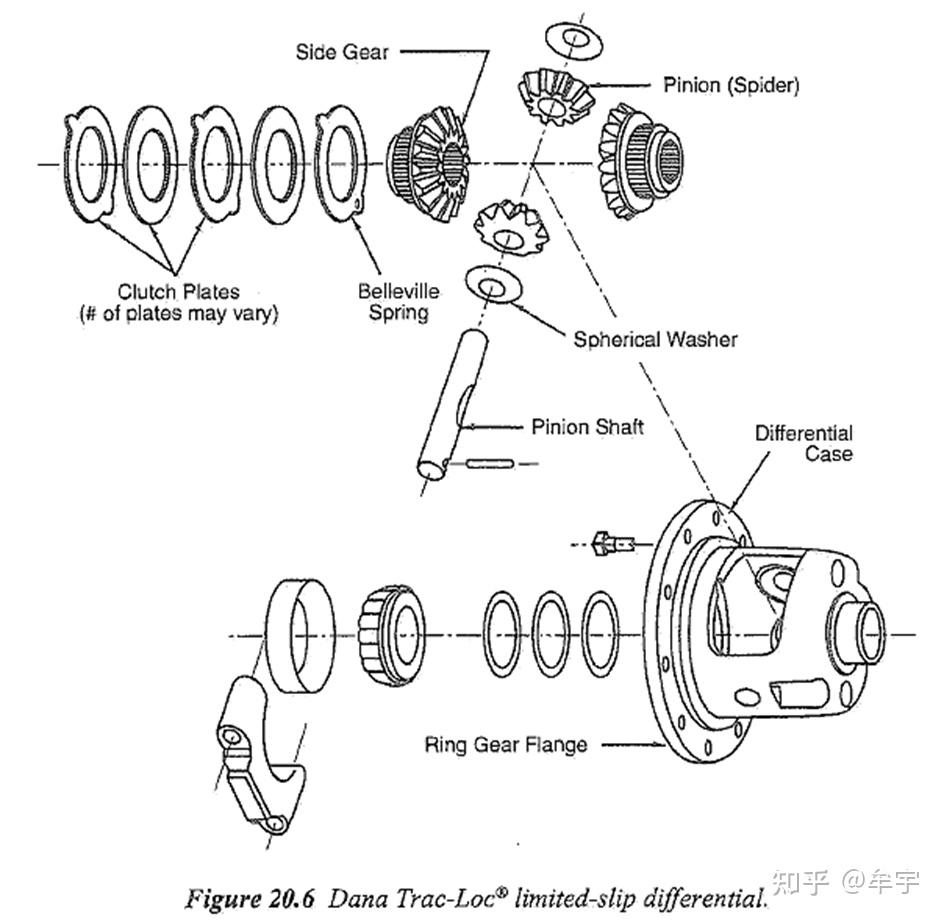
Changes in the preload are made by changing the spring washer. Changes to the torque-sensitive slope are a function of the gear pressure angles which makes tuning all but impossible (except by the manufacturer).
预紧力的改变通过更换弹簧垫圈来实现。扭矩敏感斜率的变化是齿轮压力角的函数,这使得调校几乎不可能(除非由制造商完成)。
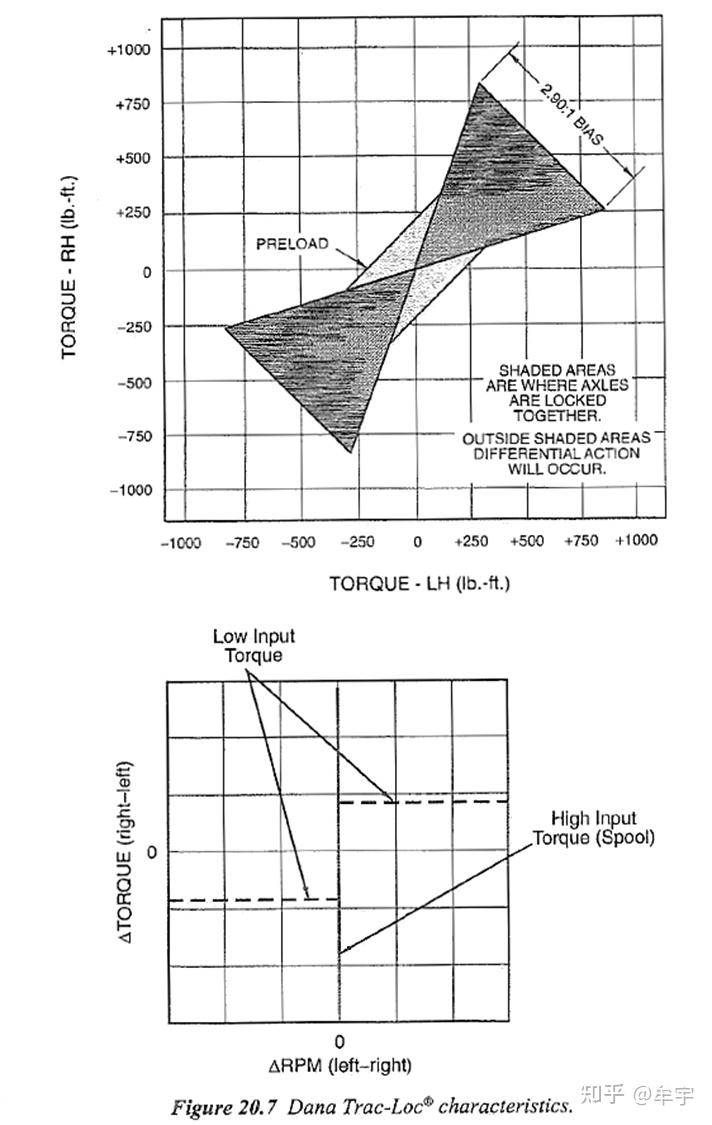
The operating characteristics of clutch pack limited-slip differentials are commonly shown in two types of plots, given in Figure 20.7. A good analysis of this general type (clutch pack), along with a discussion of lubrication requirements, is given in Ref. 56 from Oldsmobile.
离合器组式限滑差速器的工作特性通常用图20.7所示的两种曲线图来表示。奥兹莫比尔公司的参考文献56对这种通用类型(离合器组)进行了很好的分析,并讨论了润滑要求。
*Salisbury Axle
Another variant of limited slip, also originally designed by the Dana Corp., is the so-called Salisbury axle, shown in Figure 20.8. Like the Trac-Loc, clutch packs are used to progressively lock the two output shafts together. Here the spider gear axles rest against wedges which are spread by input torque. The wedges are numbered “5” in Figure 20.8 and the wedge angle is shown as α. With this design the bias ratio can be varied between driving and engine braking. Many other variants of this basic type have been used over the years with different types of springs used for preload and different configurations of clutch plates.
另一种限滑变体,同样最初由 Dana 公司设计,就是所谓的 Salisbury 车轴,如图20.8所示。与 Trac-Loc 类似,离合器组用于逐渐将两个输出轴锁止在一起。这里,行星齿轮轴靠在楔块上,楔块由输入扭矩撑开。楔块在图20.8中编号为“5”,楔角用 α 表示。通过这种设计,偏置比可以在驱动和发动机制动之间变化。多年来,这种基本类型的许多其他变体已被使用,它们采用不同类型的弹簧提供预紧力,以及不同配置的离合器片。
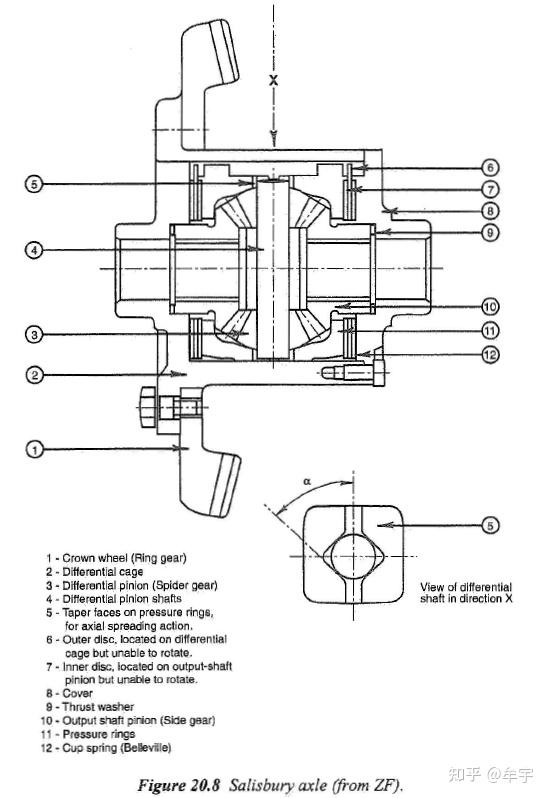
Tuning is perhaps easiest with this unit as preload is changed with spring changes and the bias ratio can be changed relatively easily by varying the wedge angles.
这种单元的调校可能是最简单的,因为预紧力通过更换弹簧来改变,而偏置比可以通过改变楔角相对容易地改变。
*Torsen® and Torsen II® Differentials
The original Torsen® differential (Figure 20.9) uses high-helix angle INVEX™ gears combined with spur gears to substitute for the side and spider gears in a conventional open differential. The configuration might better be compared with the spur gear differential shown in Figure 20.2, but with the spurs turned 90°.
最初的 Torsen® 差速器(图20.9)使用大螺旋角 INVEX™ 齿轮与直齿轮相结合,替代传统开放式差速器中的半轴齿轮和行星齿轮。这种配置或许更适合与图20.2所示的直齿轮差速器相比较,只是直齿轮旋转了90°。
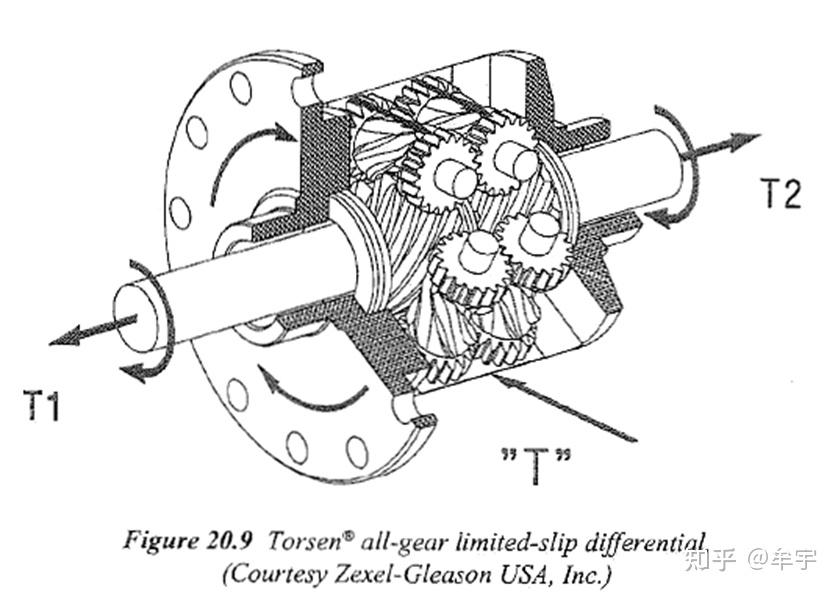
The name Torsen is derived from the words “torque sensing” which can be described as a change in the operating characteristics as a function of input torque. The Torsen offers a characteristic that is somewhat different from clutch pack units.
Torsen 这个名字源自“torque sensing”(扭矩感应),可以描述为工作特性随输入扭矩的变化。Torsen 提供了一种与离合器组单元 somewhat 不同的特性。
Under low input torque the differential gears are lightly loaded and, in fact, with the tires off the ground they spin freely like an open differential (in opposite directions, assuming the input shaft is locked). With increasing torque, the gear meshes are “loaded-up” and at some combination of differential speed and input torque the two output shafts are locked together like a spool. The major friction elements in the Torsen are the gear meshes.
在低输入扭矩下,差速器齿轮负载较轻,事实上,当轮胎离地时,它们可以像开放式差速器一样自由旋转(假设输入轴锁止,则两个输出轴反向旋转)。随着扭矩增加,齿轮啮合被“加载”,在某个差速转速和输入扭矩的组合下,两个输出轴像整体式车轴一样锁止在一起。Torsen 中的主要摩擦元件是齿轮啮合。
- The Torsen characteristic is similar to the other limited-slip types, but note that the bias ratio (torque on high-torque-wheel divided by torque on low-torque-wheel) can be controlled over a wide range. Bias ratio can vary from a high of 6:1 or 7:1 to a low of about 2.5:1. Tuning of the bias ratio is by selection of gear angles, gear surface treatments, and types of bearings (plain, roller, etc.) used in the unit and can be performed only by the manufacturer.
- Torsen 的特性与其他限滑类型相似,但请注意,偏置比(高扭矩车轮上的扭矩除以低扭矩车轮上的扭矩)可以在很宽的范围内控制。偏置比可以从高至 6:1 或 7:1 变化到低至约 2.5:1。偏置比的调校通过选择齿轮角度、齿轮表面处理以及单元中使用的轴承类型(滑动轴承、滚子轴承等)来实现,并且只能由制造商完成。
The high bias ratio and low friction at low load means that under power the original Torsen performs very much like a spool. At low input torque, such as on corner entry, it differentiates nearly freely like an open.
高偏置比和低负载下的低摩擦意味着在动力驱动下,最初的 Torsen 表现得很像一个整体式车轴。在低输入扭矩下,例如在入弯时,它几乎像开放式差速器一样自由地差速。
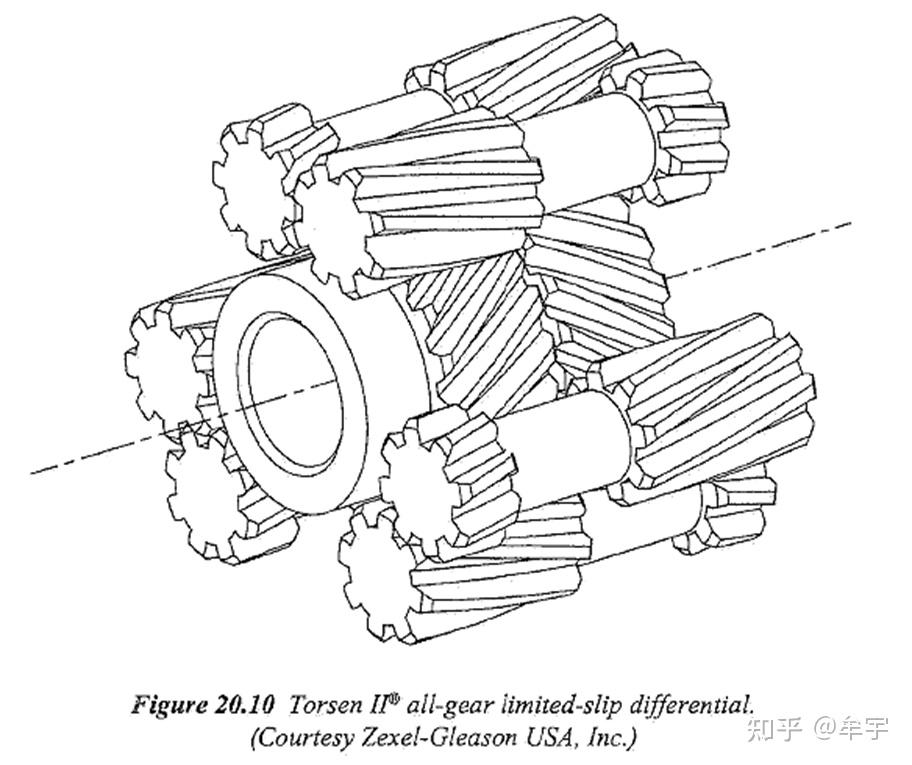
The newer Torsen II design (gear arrangement shown in Figure 20.10) reduces friction (and thus torque bias ratio) by placing all the gears on parallel shafts. This design operates like the original Torsen but the bias ratio can be tuned over a range of about 1.8:1 to 3:1.
较新的 Torsen II 设计(齿轮布置如图20.10所示)通过将所有齿轮置于平行轴上降低了摩擦(从而降低了扭矩偏置比)。这种设计的工作原理与最初的 Torsen 类似,但偏置比可以在约 1.8:1 到 3:1 的范围内调校。
Overrunning Clutch Types 超越离合器类型
In these units, such as the Weismann and the Detroit Locker, power is transmitted to the slower rotating axle (with drive torque applied) while the faster axle “overruns”; the reverse happens on overrun. Thus on corner exit, power is added to the lightly loaded in-side wheel until its rpm increases to that of the outside wheel. At this point the two wheels are locked together as with a spool.
在这种单元中,如 Weismann 和 Detroit Locker,动力被传递给转速较慢的车轴(在施加驱动扭矩的情况下),而转速较快的车轴“超越”;在惯性滑行时则相反。因此,在出弯时,动力被施加到轻载的内侧车轮上,直到其转速增加到与外侧车轮相同。此时,两个车轮像整体式车轴一样锁止在一起。
Depending on the power required mid-turn, the outside wheel may be unpowered and will generate maximum cornering force. With the car in “one-wheel drive” there will be no drag caused by this type of differential in cornering. Driving these types of differentials can be tricky as the characteristic changes quickly from free to locked. The relative speed of lockup in the Detroit Locker can be adjusted somewhat by changing a preload adjustment.
根据弯中所需的功率,外侧车轮可能没有动力,并将产生最大的侧向力。当汽车处于“单轮驱动”状态时,这种类型的差速器在转弯时不会产生阻力。驾驶这些类型的差速器可能很棘手,因为其特性会从自由状态迅速变为锁止状态。Detroit Locker 中的锁止相对速度可以通过改变预紧力调整来一定程度地调节。
Viscous Differential 粘性差速器
The viscous differential, shown in Figure 20.11, takes advantage of the characteristics of a special high-viscosity fluid. The two output shafts are connected to each other with a standard open differential and also through a multi-plate “clutch” with no mechanical contact (but very tight clearances). As can be seen on the top of Figure 20.12, the torque across the unit is a function of output shaft speed difference. As with all limited slips, the torque bias is toward the slow wheel.
粘性差速器(如图 20.11 所示)利用了特殊高粘度流体的特性。两个输出轴通过标准的开放式差速器以及一个无机械接触(但间隙非常小)的多片“离合器”相互连接。如图 20.12 顶部所示,该单元传递的扭矩是输出轴速度差的函数。与所有限滑差速器一样,扭矩偏向于转速较慢的车轮。
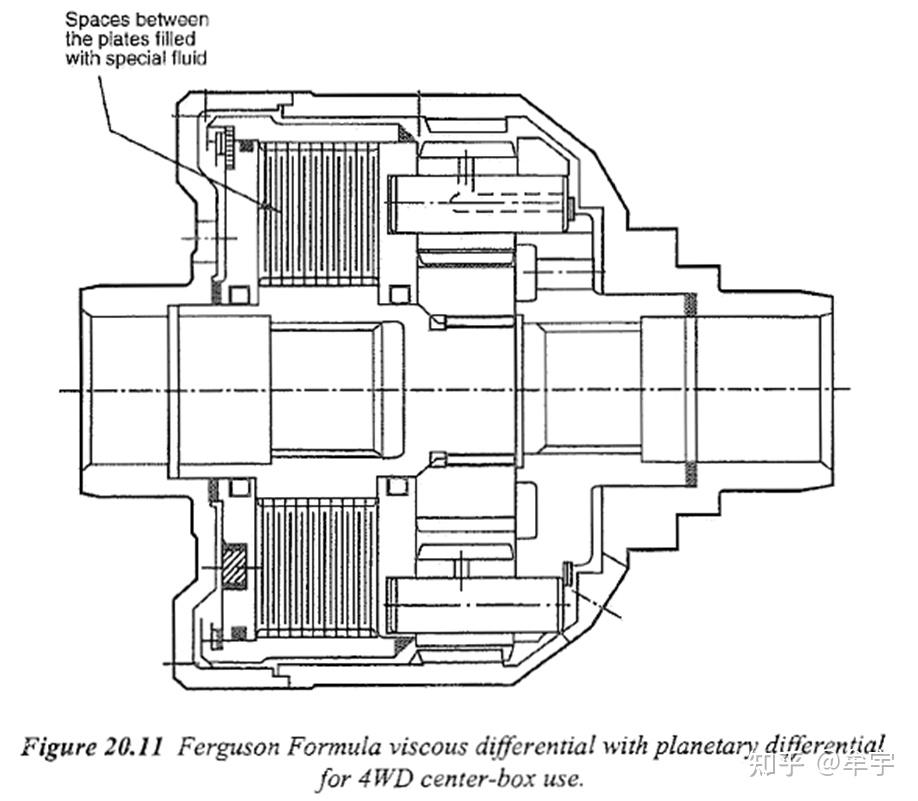
While typical lubricating oils thin out with increasing temperature, the special fluid used in viscous differentials increases viscosity above some temperature. As the “clutch” plates slide relative to each other, the special fluid heats up and the two output shafts are progressively locked together once the temperature exceeds approximately 100°C. This is plotted by the manufacturer on the bottom of Figure 20.12 and is called the “hump” curve.
典型的润滑油会随着温度升高而变稀,而粘性差速器中使用的特殊流体在超过某个温度后粘度会增加。当“离合器”片相对滑动时,特殊流体受热升温,一旦温度超过约 100°C,两个输出轴便逐渐锁止在一起。制造商在图 20.12 底部绘制了这条曲线,称为“驼峰”曲线。
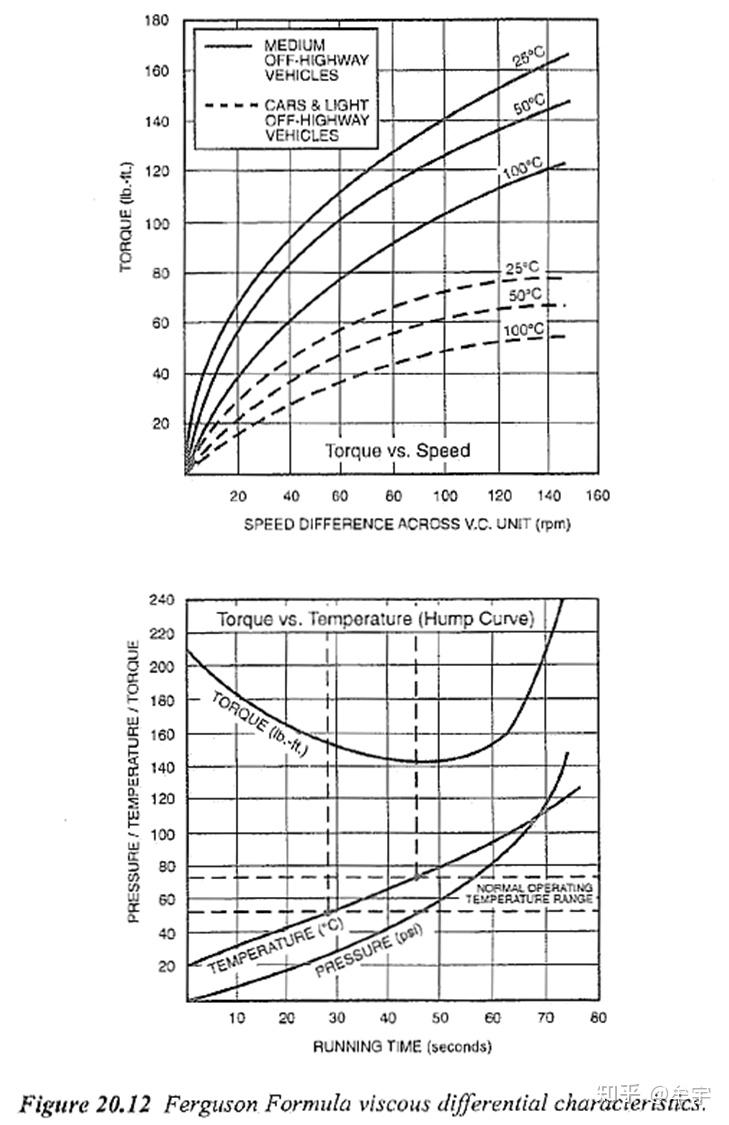
Small differences in speed, as in cornering, are not enough to lock the unit and it acts like a standard open differential. Only wheel spin generates enough heat to lock the unit up, and even this takes some time to occur.
像转弯时那样的微小速度差不足以锁止该单元,其作用类似于标准的开放式差速器。只有车轮空转才会产生足够的热量将其锁止,而即使这种情况也需要一些时间才能发生。
Viscous differentials have seen use as the center differential in some full-time four-wheel-drive systems and also have been used on front- and rear-wheel-drive cars.
粘性差速器已在一些全时四轮驱动系统中用作中央差速器,也已用于前轮驱动和后轮驱动汽车。
Application to racing is relatively new and little data are available. Because the viscous differential has a time lag in its response to wheel spin, it may not be appropriate for situations where wheel spin happens only briefly. Because it is basically an open differential (until it is heated), the viscous differential should have little effect on handling. The locking effect is gradual and this also indicates that the driver will not be surprised by the action of this unit.
在赛车上的应用相对较新,可用数据很少。由于粘性差速器对车轮空转的响应存在时间延迟,它可能不适用于车轮仅短暂空转的情况。由于它基本上是一个开放式差速器(在被加热之前),因此粘性差速器对操控性的影响应该很小。锁止效果是渐进的,这也表明驾驶员不会对该单元的动作感到意外。
Traction Control and Other Electronic Improvements 牵引力控制及其他电子改进
As noted above, mechanical and viscous limited-slip differentials can sense input torque and/or output shaft speed differences. With electronic (computer) control, it becomes possible to sense output shaft speed and react quickly to single (or both) wheel spin. As of this writing, traction control is beginning to be offered as a production option on higher-priced cars. On sensing wheel spin-up, typical control strategy is to first apply the vehicle brake to slow the spinning wheel and then to pull-off the throttle so as not to overheat the brake.
如上所述,机械式和粘性限滑差速器可以感知输入扭矩和/或输出轴速度差。通过电子(计算机)控制,可以感知输出轴速度并对单个(或两个)车轮的空转快速做出反应。在撰写本文时,牵引力控制开始作为高价量产车的选装配置提供。在感知到车轮空转加速时,典型的控制策略是首先施加车辆制动以减慢空转车轮,然后收回油门,以免制动器过热。
When added to an anti-lock brake system, traction control often requires only a small amount of additional hardware and some extra computer software. In production, on a car already fitted with anti-lock, traction control may be cheaper than a limited-slip differential and possibly more effective.
当添加到防抱死制动系统中时,牵引力控制通常只需要少量额外的硬件和一些额外的计算机软件。在生产中,对于已经配备防抱死系统的汽车,牵引力控制可能比限滑差速器更便宜,也可能更有效。
Other sensors may be added to increase the “smartness” of the algorithm. For example, steer angle, speed, and (possibly) yaw rate can be used to make a calculation of the differential wheel speeds expected at any given time. When compared to the measured wheel speeds, the computer can determine if a wheel is truly spinning or not.
可以添加其他传感器以增加算法的“智能”。例如,可以使用转向角、速度以及(可能)横摆角速度来计算在任何给定时间预期的差速轮速。通过与测量的轮速进行比较,计算机可以判断一个车轮是否真的在空转。
With a sophisticated system, traction control may offer the best solution yet to the differential problem, especially as related to handling. In normal cornering, the brakes are not in use and the open differential has its usual benign effects on handling. Under high power, wheel spin is stopped “as it happens” and in high-speed cornering there is no extra rolling resistance.
对于复杂的系统,牵引力控制可能为差速器问题提供了最佳解决方案,尤其是在与操控性相关方面。在正常转弯时,制动器未使用,开放式差速器对其操控性具有通常的良性影响。在高功率下,车轮空转被“即时”阻止,而在高速转弯时则没有额外的滚动阻力。
With appropriate sensing and control, the understeer moment created by a spool may even be partially simulated by traction control in response to the beginning of a spin.
通过适当的传感和控制,牵引力控制甚至可以根据甩尾的开始,部分模拟由整体式车轴产生的不足转向力矩。
20.3 Brake Systems 制动系统
The braking system is one of the main component systems on a vehicle and its proper operation is important to the safety and performance of competition cars. The brake system may be broken down into four basic areas:
制动系统是车辆的主要部件系统之一,其正确运行对赛车的安全性和性能至关重要。制动系统可分为四个基本方面:
- Suitable mechanical components—disk, caliper, pads, etc.
- 合适的机械部件——制动盘、卡钳、刹车片等。
- Hydraulic system
- 液压系统
- Adequate cooling
- 充分的冷却
- Brake distribution (adjustable)
- 制动力分配(可调)
Components 部件
The first decision is the choice of manual or power boost. The manual brake system is generally more responsive at the price of higher pedal effort. Chevrolet power boost units (and possibly other brands) may be modified by removal of the noise attenuator (filter) packing around the pushrod opening to improve the response time of the diaphragm during pedal application.
第一个决策是选择手动还是动力助力。手动制动系统通常响应更快,但代价是更高的踏板力。雪佛兰动力助力单元(可能还有其他品牌)可以通过移除推杆开口周围的噪声衰减器(过滤器)填料进行改装,以提高踩下踏板时膜片的响应时间。
The master cylinder reservoir must be located such that “g” forces cannot uncover the feed holes which would allow air into the master cylinder. The reservoir capacity must be adequate to fill all of the caliper pistons with the pads “worm-out” (bottomed). Check this whenever caliper or master cylinder type is changed.
制动主缸储液罐的位置必须确保“g”力不会暴露出进液孔,否则空气会进入主缸。储液罐容量必须足以在刹车片磨损到极限(触底)时填充所有卡钳活塞。每当更换卡钳或主缸类型时,都要检查这一点。
The master cylinder pushrod must be adjusted so that the piston fully returns when the pedal is released. This allows the master cylinder to refill from the reservoir between brake applications. Before the system is filled, the master cylinder also can be checked for full stroke without pedal bottoming. In dual master cylinder systems fitted with a balance bar, check that no binding occurs that would tend to vary the brake balance.
制动主缸推杆必须调整到当踏板松开时活塞能完全回位。这使主缸能在两次制动之间从储液罐重新充液。在加注系统之前,还应检查主缸在不触底的情况下是否能达到全行程。在装有平衡杆的双主缸系统中,检查是否存在可能导致制动力平衡发生变化的卡滞现象。
If possible, flexible brake lines should be replaced with metal braided hose to minimize volume change due to hose expansion. Hose expansion is one possible cause of a soft or low pedal. All rigid lines must be steel with properly double-flared ends. Brake line routing should avoid loops that will trap air and make bleeding difficult. Brake lines should be routed away from exhaust systems and other hot areas.
如果可能,应将柔性制动管路更换为金属编织软管,以尽量减少因软管膨胀引起的容积变化。软管膨胀是导致踏板发软或偏低的一个可能原因。所有硬管必须是带有适当双喇叭口端部的钢管。制动管路的走向应避免形成会困住空气并使排气困难的环路。制动管路应远离排气系统和其他高温区域。
Another cause of soft pedal is caliper flex which is visible on many of the newer, light-weight production calipers. While aluminum calipers will reduce unsprung weight, steel (or iron) calipers of the same design will be stiffer. To aid smooth brake modulation, check that the calipers work freely (especially if they are the single piston type). It is useful to polish the forward edge of the opening in the caliper housing and the leading edge of the brake shoes to a smooth finish and apply a minimum amount of a lubricant such as Molycote to reduce the friction between the pad and caliper housing during brake application (keep lubricant off of the disks).
踏板发软的另一个原因是卡钳变形,这在许多较新的轻型量产卡钳上可见。虽然铝制卡钳可以减少非簧载质量,但相同设计的钢(或铸铁)卡钳会更硬。为了有助于平稳的制动调节,应检查卡钳是否工作自如(尤其是如果它们是单活塞类型)。将卡钳壳体开口的前缘和刹车片的前缘打磨光滑,并涂抹极少量的润滑剂是有益的(例如 Molycote)以减少制动时刹车片与卡钳壳体之间的摩擦(保持润滑剂远离制动盘)。
Brake pads are available in many styles and materials. Probably some experimentation will be necessary to find the correct combination unless your racing class has already “standardized” on a particular type. New pads typically need to be bedded in. This involves bringing them up to operating temperature in the hopes of causing any gas components in the bonding agents to leave. In at least one case that the authors are aware of, gas (or liquid) that evolved from new brake pads adhered to the brake disks and interfered with proper braking until it was removed.
刹车片有多种样式和材料可供选择。除非您的赛车组别已经“标准化”了某种特定类型,否则可能需要进行一些试验才能找到正确的组合。新刹车片通常需要磨合。这涉及使它们达到工作温度,希望使粘合剂中的任何气体成分逸出。在作者已知的至少一个案例中,新刹车片释放出的气体(或液体)附着在制动盘上,干扰了正常制动,直到将其清除。
Brake disk rotors must be machined to run true on the wheel bearings. Any runout will knock the pads back and cause a low pedal, not to mention steering vibration (on front).
制动盘必须经过机加工,使其在轮毂轴承上运转平稳。任何跳动都会将刹车片推回并导致踏板偏低,更不用说(对于前轮)会引起转向振动了。
Hydraulics 液压系统
The second part of the brake system is the bleeding of the hydraulic system. It is essential that all of the air be removed from the system in order to maintain a firm pedal. First, use clean, new brake fluid. Brake fluid will absorb moisture from the air which will reduce the fluid boiling point. Due to the extreme braking temperatures encountered in competition, use DOT-approved 550° boiling point fluid. Regular fluid changes to avoid possible vapor lock under high temperature are recommended because of the above-mentioned affinity of glycol-based hydraulic fluid for water. Care should be taken when pouring the fluid into the master cylinder to prevent the formation of small bubbles which can become trapped in the system.
制动系统的第二部分是对液压系统进行排气。为了保持踏板坚实,必须将系统中的所有空气排出。首先,使用干净的新制动液。制动液会从空气中吸收水分,从而降低其沸点。由于比赛中会遇到极高的制动温度,请使用 DOT 批准的沸点为 550° 的制动液。由于上述乙二醇基液压油对水的亲和性,建议定期更换制动液以避免高温下可能的气阻。将制动液倒入主缸时应小心,防止形成可能滞留在系统中的小气泡。
Silicone fluid should be used only if the system in question has silicone-compatible seals, silicone-based fluid should not be mixed with glycol-based fluid.
硅基制动液仅应在系统具有兼容硅油的密封件时使用,且硅基制动液不应与乙二醇基制动液混合。
The bleed screws on the calipers must be at the extreme top of the caliper, otherwise the bleeding process will not remove all of the air. When calipers are changed for a new type it is very easy to overlook the location of the bleed screw. If the bleed screw is on the bottom of the caliper, often a switch from left to right will solve the problem, otherwise the caliper may need to be removed and rotated to raise the bleed screw to the top. In this case, the pads must be spaced apart by a shim of approximately the disk thickness during the bleeding process; the calipers can be reattached once they are bled.
卡钳上的放气螺钉必须位于卡钳的最顶端,否则排气过程无法移除所有空气。当更换新型卡钳时,很容易忽略放气螺钉的位置。如果放气螺钉位于卡钳底部,通常左右对调即可解决问题,否则可能需要拆下卡钳并旋转,使放气螺钉升至顶部。在这种情况下,在排气过程中,必须用大约与制动盘厚度相同的垫片将刹车片隔开;排气完成后可重新安装卡钳。
When bleeding, either by pressure bleed system or by manual stroking of the pedal, tap the caliper housings with a small rubber hammer to free any lodged air bubbles that may get caught in the calipers. Use sufficient fluid to purge the system and ensure complete elimination of air bubbles.
无论使用压力排气系统还是手动踩踏踏板进行排气,都应用小橡胶锤轻敲卡钳壳体,以释放可能卡在卡钳中的任何气泡。使用足够的制动液冲洗系统,确保完全消除气泡。
Ventilation 通风
Adequate ventilation for the rotors and calipers must be provided. Air must be ducted directly to the eye of the rotor and, optionally, air blast may be directed at the caliper if fluid boiling (spongy pedal) is a problem. As the front brakes do most of the work, cooling them is most important; rear cooling may also be necessary depending on the application.
必须为制动盘和卡钳提供充分的通风。空气必须直接引导到制动盘的通风口,并且如果存在制动液沸腾(踏板发软)问题,可选择将空气吹向卡钳。由于前制动承担大部分工作,冷却前制动最为重要;根据具体应用,后制动冷却也可能是必要的。
Brake cooling air should be taken from a high-pressure location, for example, the front of an air dam (chin spoiler). To be effective, ducting should use 3-in. minimum diameter hose unless the duct is very short.
制动冷却空气应从高压位置获取,例如气坝(前扰流板)的前部。为了有效,除非管道非常短,否则应使用最小直径为 3 英寸的软管。
Brake Distribution 制动力分配
Proper brake balance is extremely important. First, the vehicle will not achieve the maximum braking deceleration unless all four tires are brought to the friction peak simultaneously. Second, improper brake balance will cause one end or the other to lock up first and this end of the car will lose cornering traction on corner entry. Proper brake balance is a function of the loads on the wheels, which is in turn a function of the deceleration.
合适的制动力平衡极其重要。首先,除非所有四个轮胎同时达到摩擦峰值,否则车辆无法达到最大制动减速度。其次,不合适的制动力平衡会导致一端或另一端首先抱死,而车辆的这一端在入弯时会失去转弯牵引力。合适的制动力平衡是车轮载荷的函数,而车轮载荷又是减速度的函数。
There are two common ways to adjust the brake balance. The first type is most appropriate for systems that use a production-type dual piston master cylinder. This amounts to fitting a brake pressure regulator in line with whichever end of the car tends to lock up first. The other method is to use a dual master cylinder set-up with an adjustable balance beam splitting the pedal force between the two cylinders.
调整制动力平衡有两种常用方法。第一种最适用于使用量产型双活塞主缸的系统。这相当于在车辆容易先抱死的那一端串联一个制动压力调节器。另一种方法是使用双主缸设置,配有一个可调节的平衡杆,将踏板力分配到两个主缸之间。
In either case, the brakes should be initially adjusted to bias them toward front lockup. After the driver is familiar with this characteristic, the brakes can be progressively biased toward the rear until rear lockup (leading to a spin) is approached. Take note of the direction of adjustment for your particular system. A common mistake when making small adjustments is to adjust in the wrong direction!
在任何一种情况下,初始调整时都应将制动偏向前轮抱死。当驾驶员熟悉了这一特性后,可以逐渐将制动向后轮偏置,直到接近后轮抱死(导致甩尾)。请记下您特定系统的调整方向。进行微调时一个常见错误是调反了方向!
Estimates of proper brake balance can be made. First, a maximum deceleration must be assumed to calculate the approximate wheel loads during braking. For vehicles that will race on wet as well as dry surfaces, the calculations must be made twice to find the range of adjustment required.
可以估算合适的制动力平衡。首先,必须假设一个最大减速度,以计算制动期间近似的车轮载荷。对于将在干湿路面上比赛的车辆,必须进行两次计算,以确定所需的调整范围。
W_(1 braked)=W_1+W(a/g)(h/l)
where W_1 braked= weight on front axle during a stop of (a/g) deceleration
其中 W_1braked = 在 (a/g) 减速度下制动时前轴上的重量
W_1 = weight on front axle with no braking but with any aero effects (download, drag) at the speed of interest
W_1 = 无制动但在所关注速度下考虑任何空气动力效应(下压力、阻力)时前轴上的重量
W = gross weight of vehicle
W = 车辆总重
a/g = deceleration of the vehicle in “g” units; values can range from over 3.0g for high speed with aero download to about 0.1g for ice
a/g = 车辆减速度,以“g”为单位;取值可从高速时带空气动力下压力的 3.0g 以上到冰面上的约 0.1g
h = height of the vehicle center of gravity above ground
h = 车辆质心离地高度
l = wheelbase, measured in the same units as h
l = 轴距,与 h 采用相同单位
The load on the rear track is given by
后轴上的载荷由下式给出
W_(2 braked)=W_2−W(a/g)(h/l)
where W_2 braked = weight on rear axle during a stop of (a/g) deceleration.
其中 W_2 braked= 在 (a/g) 减速度下制动时后轴上的重量。
A quick look at these equations shows that at very low decelerations (when a/g is small) the weight on the wheels is nearly the same as the weight distribution. For high g decelerations the second term becomes significant. To minimize the second term effect, a low CG and long wheelbase are necessary.
快速浏览这些方程可以看出,在非常低的减速度下(当 a/g 很小时),车轮上的重量与重量分布几乎相同。对于高 g 减速度,第二项变得显著。为了最小化第二项的影响,需要低质心和长轴距。
Next, tire data for braking coefficient of friction is necessary. Tire braking coefficient (μ) decreases with increasing load (similar to cornering performance). Because of this “load sensitivity,” the maximum μ will likely be higher on the rear axle (lightly loaded). This will probably be true even if the same design tire is used front and rear. Tire data will usually be difficult to estimate unless manufacturers' data are available. Some idea can be had by looking at the tire data for cornering given in Chapter 2.
接下来,需要轮胎制动摩擦系数的数据。轮胎制动系数 (μ) 随载荷增加而减小(类似于转弯性能)。由于这种“载荷敏感性”,后轴(轻载)的最大 μ 可能更高。即使前后使用相同设计的轮胎,情况也可能如此。除非有制造商提供的数据,否则轮胎数据通常难以估算。可以通过查看第 2 章给出的转弯轮胎数据获得一些概念。
Once the available μ at the operating load is known (or estimated), the braking force, F=W_braked×μ_effective can be calculated. The braking force for straight-line braking will be split approximately evenly left and right so the weight and braking force on each tire will be half the total for its axle. To generate this force at the wheel, the following formula may be used to calculate the required brake line pressure:
一旦工作载荷下的可用 μ 已知(或估算出),制动力 F=W_braked×μ_effective 就可以计算出来。直线制动的制动力将大致均匀地左右分配,因此每个轮胎上的重量和制动力将是其车轴总量的一半。为了在车轮处产生这个力,可以使用以下公式计算所需的制动管路压力:

where
其中
p = Brake line pressure, lb./in.22
p = 制动管路压力,磅/平方英寸
F_x = Required longitudinal force from a wheel, lb.
F_x = 来自一个车轮所需的纵向力,磅
R_l/r = Loaded radius of the tire / brake caliper radius
R_l/r = 轮胎载荷半径 / 制动卡钳半径
A_c = Total caliper piston area, in.22 (sum of all the pistons’ areas)
A_c = 卡钳活塞总面积,平方英寸(所有活塞面积之和)
μ_pad = Coefficient of friction of brake pad (typical range = 0.3 to 0.45)
μ_pad= 刹车片摩擦系数(典型范围为 0.3 至 0.45)
To generate this pressure, the will be a certain pedal force applied to the area of the master cylinder piston. Assuming that the system is not boosted, a master cylinder is known, and there is a desired formula will allow calculation of the pedal ratio for single master cylinder systems. If a dual cylinder system is used, the balance bar ratio must also be taken into effect.
为了产生这个压力,需要一定的踏板力施加在主缸活塞的面积上。假设系统为无助力、已知主缸参数,并且有一个期望的公式,可以计算单主缸系统的踏板比。如果使用双缸系统,还必须考虑平衡杆的比值。

where
其中
R_pedal = Distance (in inches) from the master pivot to the pedal pivot; this number will be greater than 1
R_pedal = 从主缸枢轴到踏板枢轴的距离(英寸);该数值将大于 1
A_master = Area of the master cylinder, in.22
A_master = 主缸面积,平方英寸
F_foot = Pedal force, lb.; use a scale under your driver's foot to estimate the desired pedal force; a typical number for street cars is 40 lb. for a 1g stop
F_foot = 踏板力,磅;使用驾驶员脚下的秤来估算期望的踏板力;乘用车在 1g 制动时典型值为 40 磅
Once this calculation is made, check that the pedal ratio chosen will allow the master cylinder to travel through its full stroke. It may be necessary to cycle through the calculations several times for a new design to balance the various pistons and achieve a reasonable pedal force. In the above calculations, it was assumed that the master cylinder was located at the front of the vehicle. If the master cylinder is located at the rear, the pedal force will need to be increased accordingly.
完成此计算后,检查所选踏板比是否能允许主缸完成其全行程。对于新设计,可能需要反复进行多次计算,以平衡各种活塞并实现合理的踏板力。在上述计算中,假设主缸位于车辆前部。如果主缸位于后部,则踏板力需要相应增加。
Anti-lock Brakes 防抱死制动系统
The most recent advance in brake systems involves the addition of wheel speed sensors, a computer, and a mechanism for lowering brake line pressure. Current anti-lock brake systems (ABS) cycle the brakes between “near free-rolling” and “near lockup” while attempting to maintain the tire near the friction peak on a variety of surfaces.
制动系统的最新进展包括增加轮速传感器、计算机和降低制动管路压力的机构。当前的防抱死制动系统在“接近自由滚动”和“接近抱死”之间循环制动,同时试图在各种路面上将轮胎保持在摩擦峰值附近。
Current ABSs use the wheel speed signal for two purposes. First, with the wheel free-rolling, the wheel speed defines the vehicle speed. Second, with the brakes applied, the wheel speed determines the percent slip. The latter is maintained near the best slip ratio for the particular tire, often about 10%. Thus the brakes must cycle-off for a small time to update the computer as to the actual vehicle speed. As the computer algorithms are improved, the “off” time is reduced and performance is still further improved.
当前的防抱死制动系统使用轮速信号有两个目的。第一,在车轮自由滚动时,轮速定义了车速。第二,施加制动时,轮速决定了滑移百分比。后者保持在特定轮胎的最佳滑移率附近,通常约为10%。因此,制动必须短暂地循环关闭,以便计算机更新实际车速。随着计算机算法的改进,“关闭”时间缩短,性能得到进一步提高。
In the future, vehicles may be fitted with an additional road speed sensor independent of any wheel speed. With this extra information, the ABS computer can be programmed to hold the tire at the correct slip ratio for best braking whenever maximum braking is commanded.
未来,车辆可能会安装独立于任何轮速的附加车速传感器。有了这些额外信息,防抱死制动系统计算机可以被编程为,在命令最大制动时,将轮胎保持在正确的滑移率以获得最佳制动效果。
For paved circuit racing, a skilled driver with a well-balanced brake system is still the most common set-up. There are two reasons for this: Anti-lock does not increase the stopping power of the brakes for straight-line braking, and often the driver uses a slightly biased brake system to modify the handling during turn in. For any type of competition where the various wheels will be on different coefficients, or where braking must be done with one or more wheels off the ground, ABS may be an advantage. A four-wheel ABS system effectively adds an additional left-right brake balance to the standard front-rear balance and braking performance should be improved.
对于铺装路面赛道比赛,配备良好平衡制动系统的熟练驾驶员仍然是最常见的配置。原因有二:防抱死系统不会增加直线制动的制动力,并且驾驶员通常使用略微偏置的制动系统来改变入弯时的操控性。对于任何类型的比赛,如果各个车轮处于不同的附着系数下,或者必须在一个或多个车轮离地的情况下制动,防抱死制动系统可能是一个优势。四轮防抱死系统有效地在标准的前后平衡之外增加了左右制动平衡,制动性能应能得到改善。
【完】