小米用户称天冷前轮转向会发出「咯噔」声,官方称是正常现象,车企口中的「阿克曼角」现象到底是怎么回事?
本文动机是试图从更利于科普的角度解释一下这个问题:
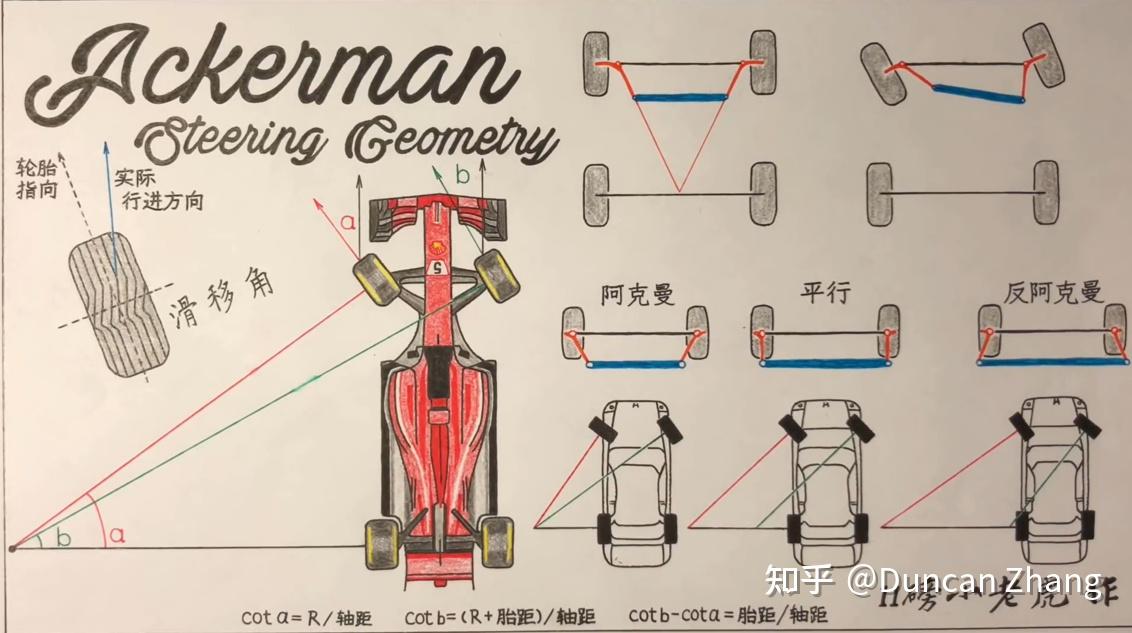
图表 1 来自“小老虎”关于Ackeman Steering Geometry的视频解读;
首先,推荐大家去B站或者Youtube找找“小老虎”的这集关于阿克曼转向几何的视频作品。他围绕着上图(就这一张手绘图,但细节足够)对于阿克曼转向几何和机构进行了非常全面的论述,只是没有特别针对本问题——冬日、低速、且大转角条件下的跳胎(所引发的震动和噪音)做特别针对性的解读。技术原理上非常有参考性,去看一遍原视频,基本上前前后后的相关问题就都明白了。高中物理知识打底足够,非常的科普。
然后,再从我个人的理解角度出发,针对题目具体问题,捋一下现象和本质给大家参考,共同进步。(请注意,以下所有未标注出处的图片资料的来源都是账号“11磅小老虎”的视频截图和再加工,版权归于小老虎)
1 为什么乘用车需要阿克曼转向几何设计?
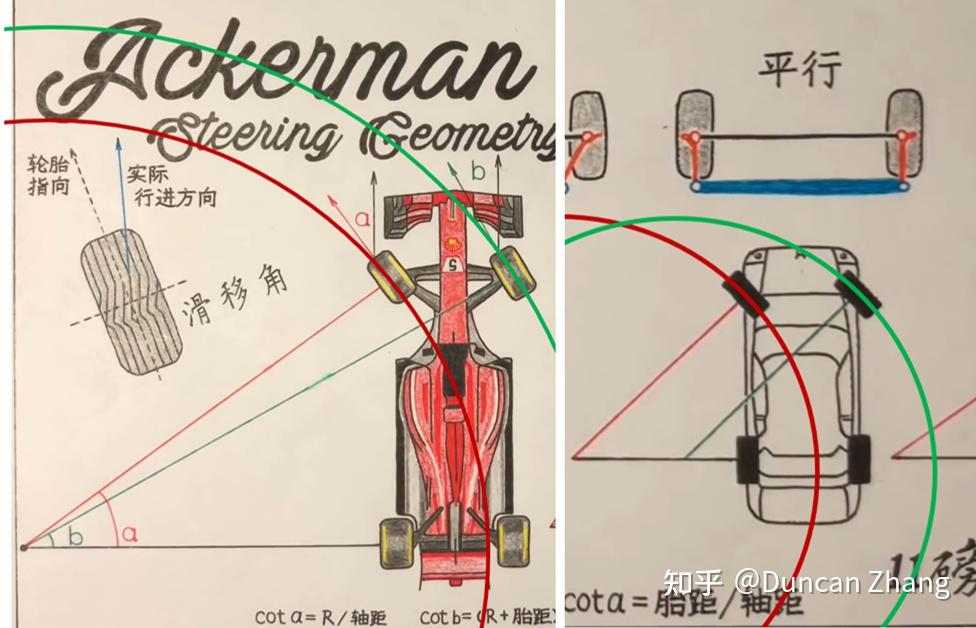
先看以下图。在本文中,将只针对前轮转向机构做描述,不包含新出现的商用四轮转向机构(其实原理一样,比如比亚迪在腾势品牌上全面推广的“易三方”系统就具备此功能)。下图左侧是符合阿克曼转向几何的车辆转弯机构的设计——即内侧轮子转过的角度大于外侧轮。而右侧是普通人在一般直觉上对于转向的理解——即转向时内外侧轮子转过相同的角度。
请关注两种情况下,转向左右前轮各自将在地面上行走的路线“趋势”(红绿色)。
图表 2
针对左侧图,当驾驶员打固定方向盘角度时,在阿克曼机构的协调下,内、外侧轮的转向角度实际不一样。内侧轮的a大于外侧轮的b,具体大多少,是经过具体车辆型号针对性标定的(和轮距和轴距相关),也和人类司机打方向盘的角度大小相关,常态下打方向盘的角度越大,a和b的数值差异越大(但此处我们固定一个角度讨论)。
这样设计的目标就是需要在几何上保证车辆在转向的过程中,作为一个刚体,始终是围绕同一个原点来转向的。轮子最好只有绕轴向的滚动状态,而尽量少地进入非轴向的“滑动”状态和各种混合状态。第一,这样利于对于车辆的操控;第二,车子是刚体,四个轮子和前后车架之间存在悬挂、驱动轴和转向拉杆的硬连接。整体上看它们是一体化的,是不可拆分的。
如果严格像在左侧阿克曼转向几何的协调下,只要司机打方向固定不变,车辆前侧两个转向轮子的相对运动趋势就一直不变、且恒定(这里不考虑离心力等因素),从而可以完整画出一个双圆构成的同心圆(红绿两色轨迹);
而针对右侧图,如果像在不满足阿克曼转向几何的条件下,车辆前侧两轮子进行等角度旋转,那么就会在地面“强行”画出两个不具备同一圆心的圆(红绿两色轨迹)。但实际在物理世界的行驶条件中,这又是不可能发生的。因为车辆和转向前双轮是刚体关联(如前述,大量的杆系和轮毂节状物的连接导致它们是一体的),左右双轮你走你的我走我的,就会产生互相挤压——内侧轮往外挤,外侧轮往里压。最终导致一个结果:谁的轮子的侧向滑动(静)摩擦力更大,谁就推动另一侧轮子被迫进入滑动状态,从而造成车辆难以控制,和轮胎磨损及大量噪音。
这是阿克曼转向几何被设计出来的根本原因。
大家都知道,两百年前在马车上就有这个问题了。阿克曼转向机构所限定的几何条件,确实可以在马车转向轮(四轮马车)处于纯粹滚动状态下,完美成立。但当年马车的整备重量和行驶速度毕竟是有限的,并没有很严重的行驶高速和质量高压力(压轮胎)所导致的滑移角问题(至少不明显),但对于今天的高速和高质量的汽车,阿克曼的设计必须得到针对更恶劣工况的拓展,才合适。
2 按照阿克曼转向几何设计的实体车辆转向机构,具体是个什么样子的?
暂时先不谈现代车辆工况的拓展如何影响转向机构,我们还是看这个原理图先,如下:
图表 3
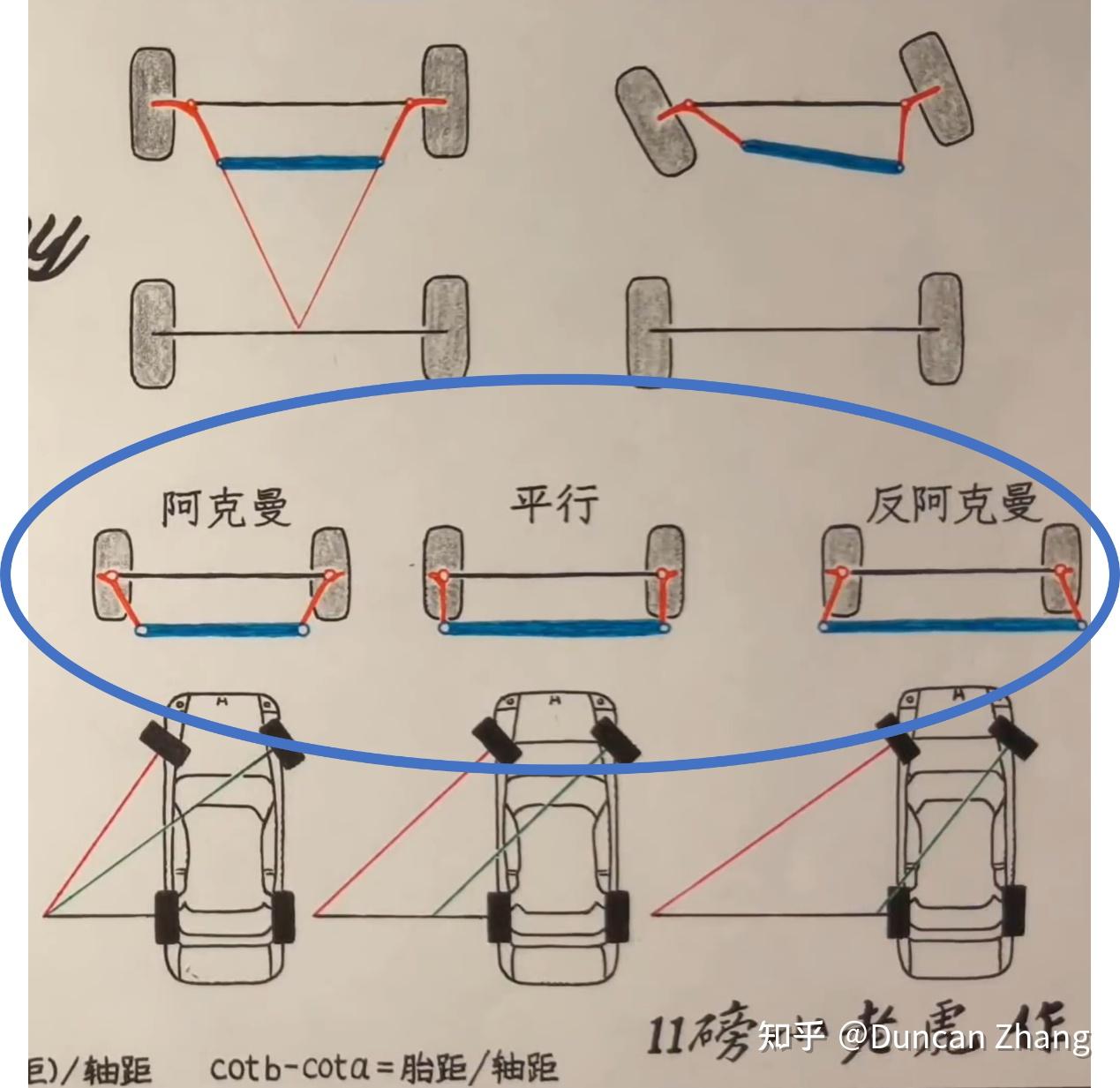
蓝色椭圆框图内是转向拉杆(蓝色代表)、轮毂上的转向节(橙色代表)的相互关系。所谓阿克曼转向百分比100%-0%,就是指从左“阿克曼”到中间的“平行”状态,这只是一种表述理论。我翻了翻,实际很难找到很好的理论对应实际物理机构的写实图片,大致的原理图参考如下:
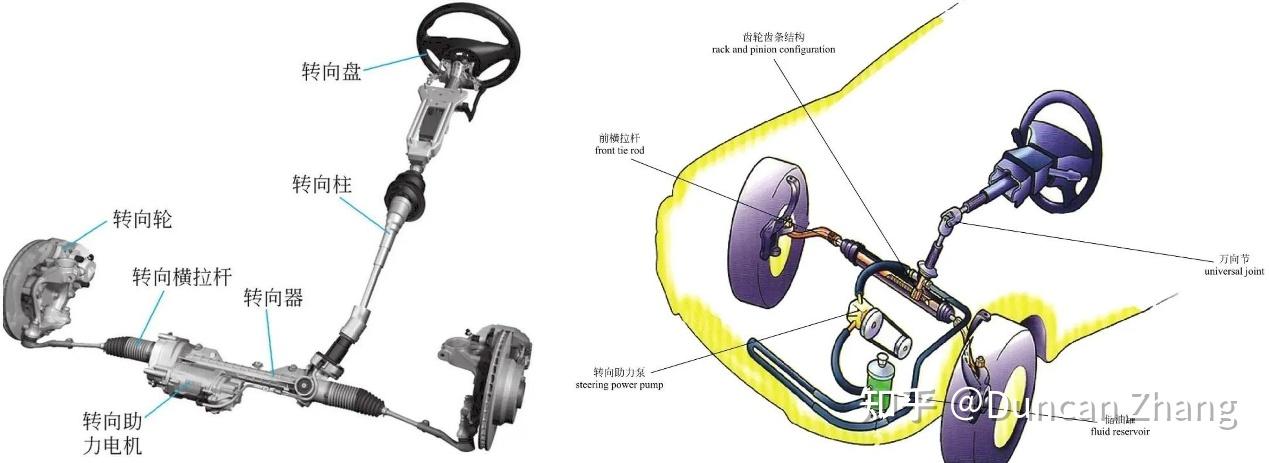
图表 4 左图来自https://www.yoojia.com/dongtai/3708525002?from_src=biji_tab ;右图来自https://www.yoojia.com/dongtai/2783474002?from_src=magic;
在上图中,基本可以看到实物化的转向横拉杆(对应理论图中的蓝色)、和转向轮毂上的转向节(即轮盘的向内凸起物,对应理论图中的橙色)。但实物图中没有给出通常位于双轮轴心的驱动轴,所以对应原理图上的那个中轴没有出现,希望不要歧义。当然,其实乘用车(前驱)的驱动轴也不是水平一根,而是有角度的两根分别从差速器中引出对接轮轴,在本文中属于讨论范围以外了。
仔细看上图中的右侧图,可以明显看出一般的机械转向拉杆设计下,横拉杆和转向节在对接后,确实形成了一个梯形的整体结构,很好地对应了理论图中的阿克曼转向几何的“梯形”限定。
这里大家可以自行脑补一下,人类司机打方向,方向盘上的旋转力和角度通过“转向柱”传递给“转向器”,再经过电机或者液压机构的助力,通过齿轮咬合,转化成“横拉杆”的横向运动,从而拉动转向节带动两轮的协调旋转。旋转的具体角度即为前述的讨论关系。
这就是当前的转向机构成熟思路落地,这种成熟的机械设计也被当前汽车工业所普遍接受。成本和可靠性平衡得很不错,是事实上的制造标准。但这里的机械限定,决定了机械转向结构的性能和适应性天花板——它没办法适应所有的精准转向需求,一旦固定制造和标定、下线,它就只能针对某些场景优化。
这个问题实际上存在于大多数车辆工程的机械结构里,比如经典的KC悬挂,弹簧和阻尼器的参数一旦固定,优化的性能区间就是固定的,而没有办法覆盖满足所有驾驶条件的需求。(但现代技术在悬挂系统的中的应用,可以根治这些问题,无非就是成本问题,需要时间)
当然,这几年逐渐浮出水面的更新电子转向/电传转向方案,当然是更好的转向方案——意味着如果在轮胎和车身本体上搭载完备的传感器,可以给每一个参与转动的轮子(两轮or四轮)安装独立的转动电机,电传转向可以完成针对每个轮子的状态测量和转向角度计算和执行,从而彻底根治我们当前在机械环境下所遇到的不可根治、只能平衡或者优化的问题——就比如问题中的小米和很多其他品牌车辆所共有被问到的问题。
没有更多的细节内容,在转向机构领域,比亚迪当前的“易三方”腾势,和“易四方”仰望,本质上就是这个思路。在悬挂上,仰望U-7现在所拥有的“云辇-Z”也是这个思路。转向节+转向横拉杆的纯粹机械方案,所天然具备的性能天花板和工况适应范围,打破他们的就是更灵活的电子化+电控方案。
3 阿克曼设计如果是完美的,那么它能覆盖所有的速度弯道条件并表现良好吗?
一切都需要在取舍上建立平衡。
在多发于掉头路段和停车场的低速度、大角度的弯道操作中,轮胎在这种相对温柔的工况下受到所谓“滑移角”的影响很小(滑移角的定义参见下图),甚至可以忽略不计,所以大体可以将其看作是轮胎在弯道中处于纯粹滚动状态。此时,如果乘用车的转向机构精准按照阿克曼转向几何进行设计和标定,就能精准实现参与转向的内外侧轮,在轴向上精准对准(延长并相交于)同一圆心,从而让前后四个轮子大致按照一个同心圆和四个半径去协调旋转…… 此处不用担心路程差,前轴和后轴上的差速器可以解决这个问题。
这种不考虑滑移角存在的阿克曼转弯操作的实际体验就是完美的,对于驾驶员和乘客都是如此。由于轮胎只有滚动没有滑动,也就没有磨损和噪声。老一代的家用车,我推测就是以满足这种低速工况为核心的准则,优先满足低速入弯和出弯的驾控体验——我的上一辆上海大众的途安Touran(2009款)就是如此,记忆里从未感觉到低速和大弯道状态下有“跳胎”引发的噪音和震动问题。
当然,主观上也很少有人开着这种娃娃车带着一家老小去尝试飙高速弯。所以尽量满足阿克曼几何限定,就是个局部最优解。这也是商业成熟产品所必需的选择。
但在当下,尤其针对电动车(高速下的高性能是一个重要卖点)的车辆设计中,就需要更多考虑高速转弯(鬼火少年们往往称为“劈弯”)条件下的弯道性能了:包含但不限于驾驶员主观的入弯和出弯精度(这里强调主观,是因为优秀的车手、司机一定对自己的车辆在高速度下的入弯和出弯时机选择和方向把握有一种特殊的主观感觉,你问他什么样的弯道多少速度下要打方向多少度?他可能难以精确描述,但他往往能精准做到。这就是因为高速弯道下,滑移角的存在是一个诱因很多、变数很大的变量)、客观的弯道中的抓地力和入弯、出弯的最大速度等等。所以这种车的转向机构设计就往往需要在传统低速区间和高速区间之间找一个新的性能平衡。
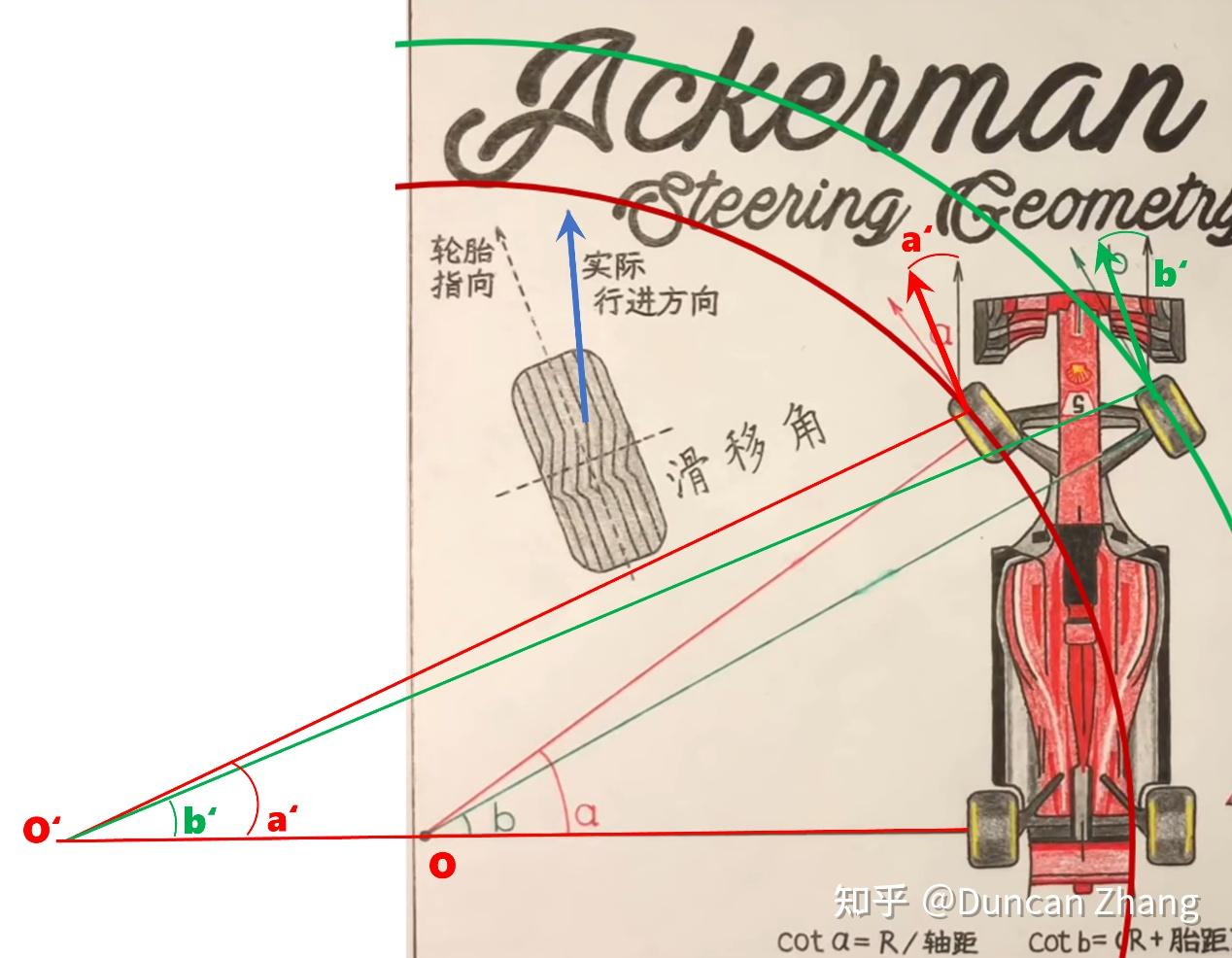
图表 5
参考上图,我们通过此图来解释在“滑移角”存在的条件下,车辆是否能找到合理的转弯中心,以及转弯中心在各种速度条件下不确定的变化。
在车辆拥有一定前进速度的前提下,庞大的车重(尤其电车)和高速度,会让车辆的转向前双轮,在司机打方向的时候,产生一种对抗转向、保持原有速度方向的“惯性”。这种惯性会导致轮胎在和路面的接触面积上,胎面的花纹在巨大的车重压力和速度惯性下,依然保持一定的前进趋势从而造成花纹的扭曲。由此,产生出这么一种滑移的效果——轮胎物理整体的指向是按照驾驶员意愿,由转向拉杆拽着转过来了,但接触面上的胎面花纹却还拧着劲儿,通过滑动的方式影响实际车辆/or轮胎的前进方向,从而和轮胎胎体指向之间产生一个滑移角度。
影响这个角度的因素很多,可以是车重、车辆入弯和出弯速度、路面纹理和摩擦状态,甚至车胎温度等等不一而足,而且瞬息万变。
在上图中由于滑移角的干扰所产生(新的轮胎运动趋势指向红绿粗箭头)的a’和b’,就是从原精准阿克曼转向角a和b中扣除滑移角后的角度,而这个角度决定这个速度下,车辆新的阿克曼转向中心不在原来的O位置,而是O’了(这是一种简化和凑巧)。从轮胎的角度讲,这是轮胎处于一种滚动+滑动的综合状态,这也是为什么高速弯道中的车辆轮胎会有尖叫噪音和大量冒烟现象的原因。
另可拓展考虑的是,在车辆高速转弯时,由于惯性会导致外侧轮胎承受更大的车身惯性压力(相对于内侧轮远大,极限情况下内侧轮甚至会被惯性抬起),所以通常外侧轮的滑移角度会远大于内侧轮。
需要注意的是,在滑移角高度不确定性的干扰下,寻找新的、且固定的统一转弯中心O’很多时候是很难做到甚至是不可能的。在上图描述的特定情况下我们做了简化处理让O’存在,但实际上,如果考虑带入滑移角干扰后的实际轮胎真实的运动速度方向(是决定转弯中心的决定因素),很多时候左右轮所具备的不同的运动趋势,会导致没有固定和统一的转弯中心存在。
例如F1赛车的极限转弯设计:
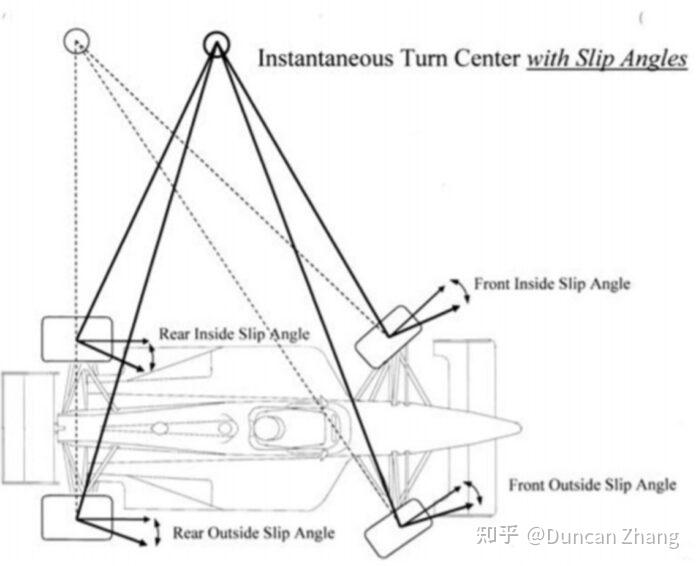
图表 6 侧滑角对于车辆转弯中心的影响,图片来自www.racing-car-technology.com.au ;
一方面它的机械转向机构甚至会考虑后轮的滑移角度的干扰因素,另一方面为了对抗高速弯道剧烈的离心力所导致的滑移角,它的机械转向机构会呈现出一种反向阿克曼机构的处理,如下图:
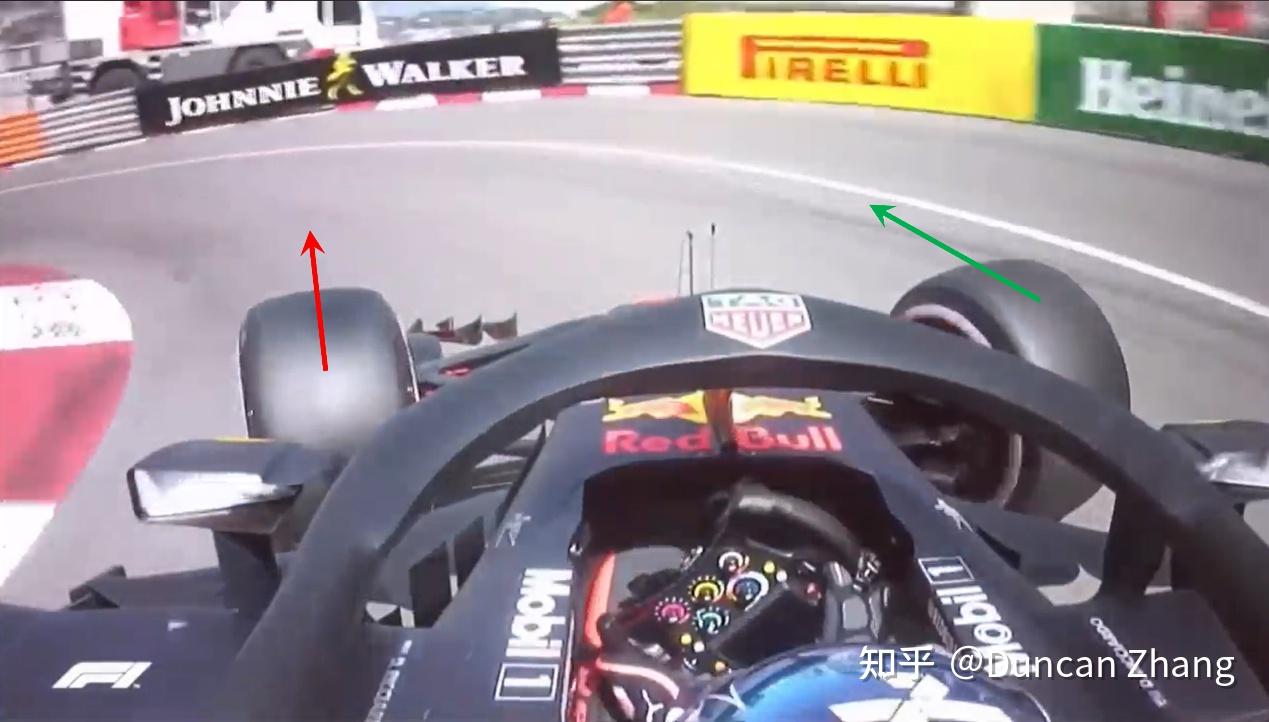
图表 7
在高速向左转的弯道中,视觉可以观察到的内侧轮的整体转弯角度(红色,也就是a),甚至比外侧轮的整体转弯角度(绿色,也就是b)还要小。这种现象就正好和阿克曼转向几何的限定相反了,体现出我们视觉观察不到的滑移角的存在——外侧轮由于惯性所导致的更大的滑移角会纠正这个内侧角效于外侧角的表面现象,而实际上依然保持a>b的客观规律。
因此,只要是符合阿克曼原理的机械转向结构,就不可能在一次性标定好后符合所有生命周期内所面临的速度和弯道工况。即便是F1也要在每站赛之前根据具体的赛道环境进行特定的标定调整(主要是在高速弯和低速弯中做取舍和平衡的机械调教),尽量覆盖大部分的弯道和速度场景,保证弯道中的抓地力和稳定性优先,而不是驾乘体验。
理论上,这只能是个非此即彼,只能平衡而无法彻底优化的问题,在现有的机械转向机构下。
4 那么,题目中问到的冬日、低速大转角的异响和抖动,到底是什么问题?
回到原始问题,答案其实已经差不多浮出水面了。
现在的车辆性能扩张,导致传统车辆上尽可能(或者倾向于)100%的机械阿克曼转向机构调教和标定已经不再流行了。我们把上图3在这里再贴一次:
图表 8
个人猜想,更多的现代车辆转向机构设计趋势,更应该位于(机械)阿克曼100%和0%之间,也就是上图中的“阿克曼”和“平行”两种转向机构之间的某个位置,既不追求极致的低速大弯道条件下的驾驶体验,也必须照顾到高速弯道条件引入“滑移角”之后的弯道稳定性,某种程度讲可能后者还更重要,毕竟安全大于体验。
如此,当车辆进入低速弯时,可能就不存在固定、统一的转弯中心了,内外侧轮各自按照自己的中心和半径转弯,从而产生彼此的对抗和干扰。当然是在一定程度内,特别是依赖轮胎的弹性、悬挂和各种杆系之间的柔性连接机构(比如球头衬套)能够消灭一部分的不同心转弯。担当所有的不利因素,比如冬季冷胎的因素一起出现叠加时,产生内外胎互相干涉的跳胎,噪音和震动通过通路进入驾驶舱,也就不奇怪了。
我自己的(电车)驾驶体验也是如此,而且不仅冬季,在夏天也有出现的概率。最开始我还以为是传动轴和轮毂链接的万向咬合机构的机械问题,一度想去4S店做个检查的……
全文完。