小米用户称天冷前轮转向会发出「咯噔」声,官方称是正常现象,车企口中的「阿克曼角」现象到底是怎么回事?
你是1900年的一名汽车设计师,有一天你的客户跟你抱怨:“妈的,我的车拐小弯的时候掉头半径好大,而且轮胎磨损程度不一致。”
你大手一挥,好办!
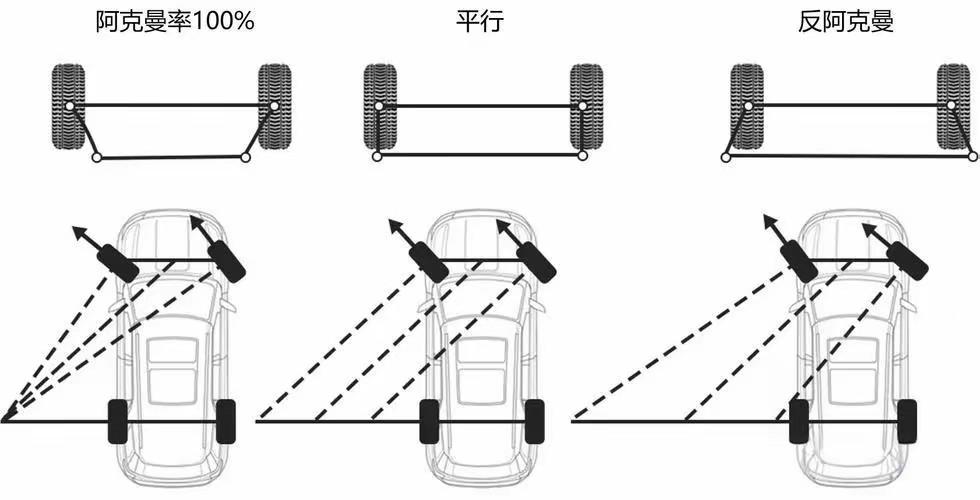
问题出在“转向几何”上。这车原厂设计不好,打方向的时候,左右两个前轮转的角度一样,过弯时两个轮胎并不指向同一个圆心,所以车辆磨损很厉害。
于是你伸手硬掰转向连杆,让车辆的内侧轮胎转向角度变大,让两个前轮都指向同一个圆心。
完美,你管这个叫阿克曼角。
他千恩万谢的走了,过了几天,他又跑来找你
“大师,我的车现在低速好开,但是高速不稳定呀,怎么办?”
你大手一挥,好办!
上次我们把内侧轮胎的转向角度变大,虽然低速下变得灵活了,但主要提供侧向力的外侧轮胎,在高速过弯时支撑力不足,开起来才会推头。
所以你直接把外侧车轮的转向角度变大,这样外侧轮胎在高速行驶时的侧向支撑力变好,高速过弯会更稳定。
完美,这就叫反阿克曼角。

过了几天,你的客户又来找你:“大师,能不能像汽车在高速行驶时用反阿克曼角,低速行驶时用阿克曼角?”
你大手一挥,好办!
你转身,一把拉开他的车门,拽下他的方向盘……后面连着的那根转向柱。在他目瞪口呆中装上了线控转向。
然后你抓起地上的沙子,双手摩擦生热,很快你摊开手掌,露出出一块硅片,你用别针在上面刻出细细的痕迹。是的,你是在手刻芯片。

你一记手刀,把转向拉杆从中间一劈两段,通过电机控制转向,让两个轮胎分别受控。
传统的机械转向装置,车轮和转向机构是硬连接,所以设定好的转向比例不能更改;而线控转向并不与车轮硬连接,是由电脑读取方向盘的旋转角度,再去匹配最佳的车轮转向角。
所以在电脑的帮助下,你可以实现随时调整车辆的阿克曼角,让车辆在高速上稳定,低速上灵活。
完美,这就是所谓的线控转向,是智能驾驶的基础。

客户半信半疑的把车开走了,过了几天他又高兴的回来:“大师,你改的车好好开,但是我在想,前轮能转,后轮能不能也……”
你大手一挥,好办!
不就是后轮转向嘛,你单手驾轻就熟地把车举起,将后轮转向拉杆拽了下来,加上了小巧的转向电机和拉杆,重新连接到线控转向系统,让电脑去匹配最佳的后轮转向角度。
这样车辆能够更加完美的响应你的意图,在你想起飘的时候就能起飘,你想稳定的时候就能稳定。
完美。
你看着客户面前面目全非的车,满意的拍了拍手,这辆车所有和转向系统相关的东西,你已经调整完毕了。
客户又从侧面迎了上来:“大师,我想要车能飞起来。”
你拽着他的领子,你是汽车设计师,又不是飞机设计师,况且这都改了多少版方案了?需求越提越离谱。
你手腕一发力,原地转了两圈,然后嗖地一声
你让客户飞了起来。

我是蓝光猫的模,关注看更多汽车赛车相关回答
维斯塔潘能不能称得上F1历史最强车手,没有之一?