关于城市道路开快车性价比不高的数学分析以及扯闲篇
一、先说结论
在城市道路上驾驶,开快车,总是伺机超车,性价比不高。
性价比最高的是:“按部就班”跟着车流走,反而是最聪明、最舒适、最安全也最省油的方式。
二、再说原因
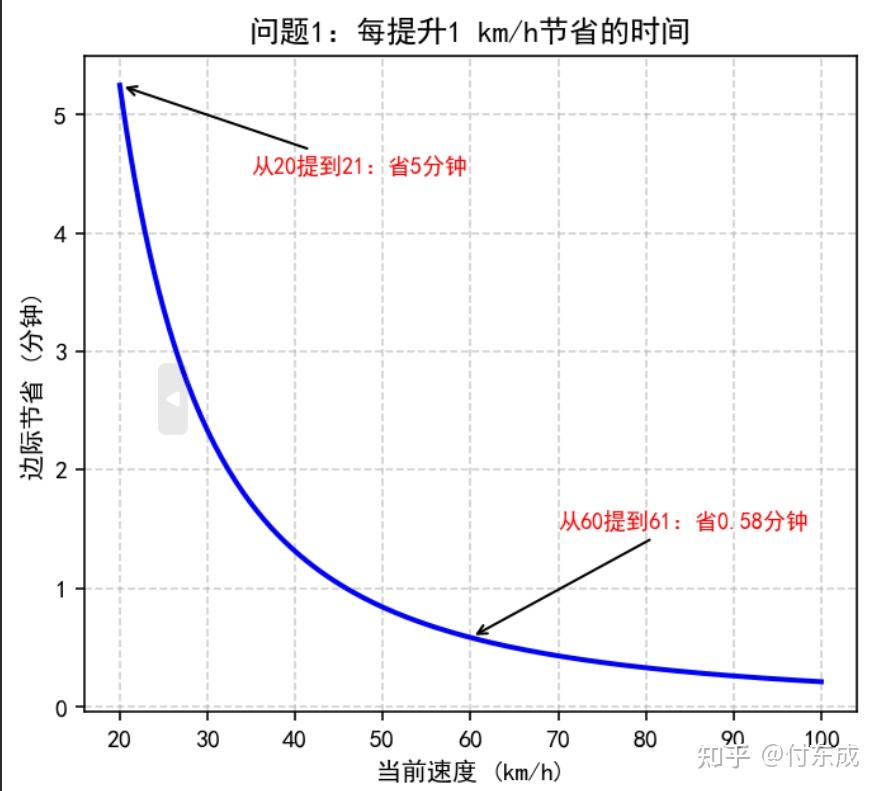
1.速度越高,节省时间的“性价比”越低。从低速提升到稍高的速度能显著缩短时间,而高速下再加速的收益微乎其微,即边际效益递减。
2.城市道路通行,真正决定你几点到公司的,是红绿灯的个数、红绿灯的时长以及它们与路程的配比,以及你能不能踩准绿波带的节奏。“猛踩油门”和“跟大部队走”到公司时间差不多——因为我们被同一组红绿灯控制着,形成了一种“动态平衡”。个人快速驾驶能获得的局部收益,会被下一个瓶颈(红灯)强制清零。
或者说换个视角——不是“你能开多快”,而是“你将被怎么卡”。
三、数学分析
基本参数:
真实参数:通勤路程35公里; 10个红绿灯。
假设参数:
10 个灯等距分布,间距 3.5 km;
信号周期 120 秒,每周期绿灯 40 秒(平均等红灯 40 秒);
这些灯实施了一根绿波带,设计速度 52.5 km/h(这正是常见城市干道绿波速度);
1.速度越高,节省时间的“性价比”越低。
上表格~
固定距离:35km
| 速度 (km/h) | 时间 (小时) | 节省的时间 (相比前一个速度) |
| 10 → 20 | 3.5000 → 1.7500 | 1.7500 小时 (105 分钟) |
| 20 → 30 | 1.7500 → 1.1667 | 0.5833 小时 (35 分钟) |
| 30 → 40 | 1.1667 → 0.8750 | 0.2917 小时 (17.5 分钟) |
| 40 → 50 | 0.8750 → 0.7000 | 0.1750 小时 (10.5 分钟) |
| 50 → 60 | 0.7000 → 0.5833 | 0.1167 小时 (7 分钟) |
| 60 → 70 | 0.5833 → 0.5000 | 0.0833 小时 (5 分钟) |
| 70 → 80 | 0.5000 → 0.4375 | 0.0625 小时 (3.75 分钟) |
| 80 → 90 | 0.4375 → 0.3889 | 0.0486 小时 (约 2.92 分钟) |
| 90 → 100 | 0.3889 → 0.3500 | 0.0389 小时 (约 2.33 分钟) |
从 10→20 km/h 每提升 1 km/h 可省 10.5 分钟(总省 105 分钟)。
从 90→100 km/h 每提升 1 km/h 只省 约 14 秒(总省 2.33 分钟)。
可以看出,速度到60~70km/h之后,再往上,省时间的效果就变小了。
上曲线~
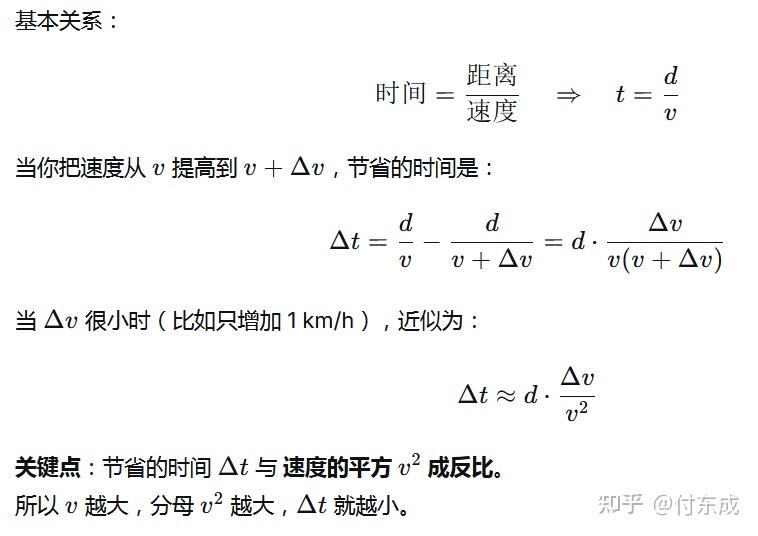
上公式~
2.“猛踩油门”和“跟大部队走”到公司时间差不多。
上曲线~
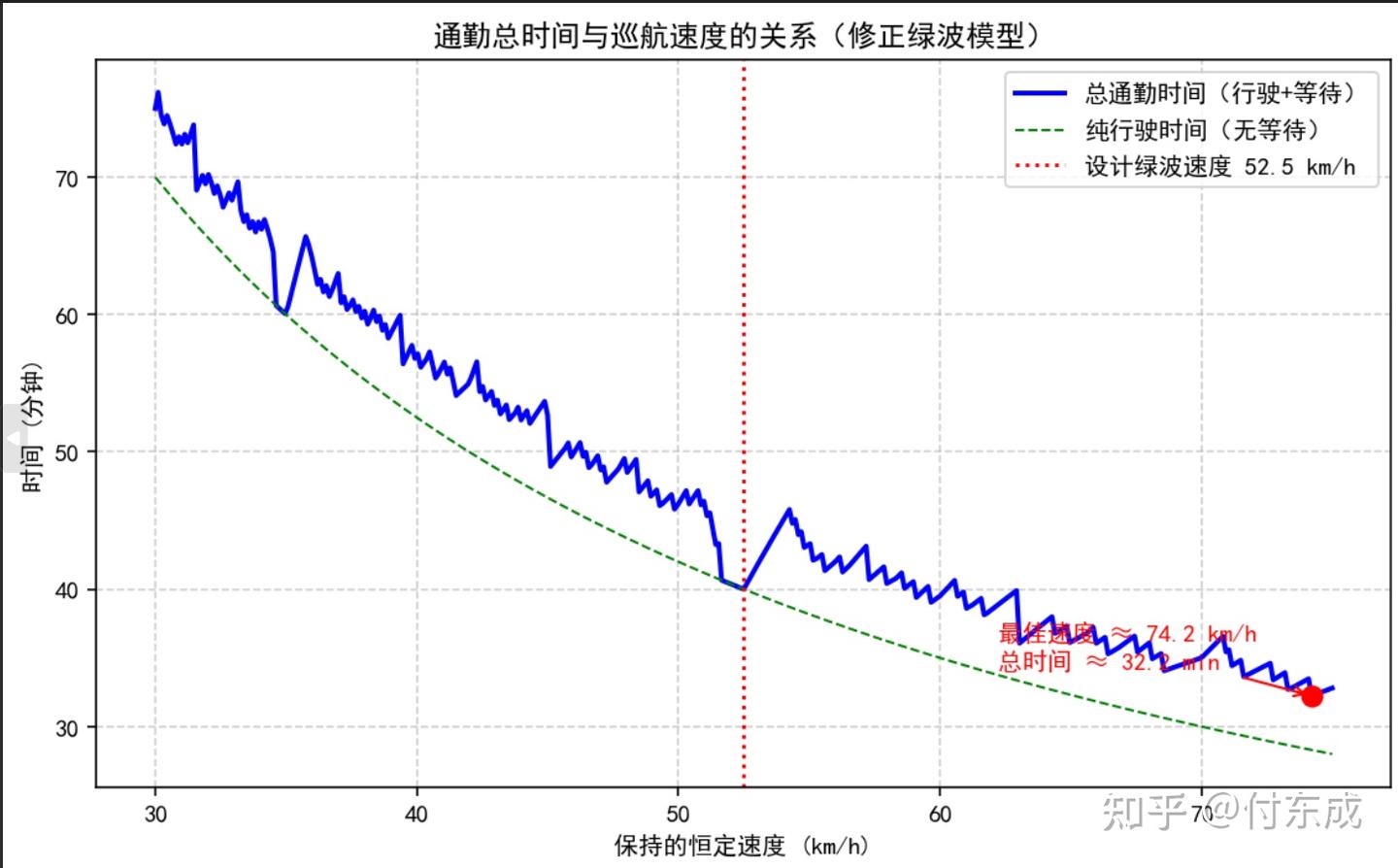
可以看出,一般情况下的总时间在平均速度 52.5 km/h 附近达到最小值(这是我经过实际体验,测出的这段路的绿波速度)。
实操实测层面,在这段路上,只要保证平稳行驶时,车速表大致都在70km/h左右即可,没必要太快。35km路程基本上40分钟就能到公司。
不断超车,省时间的效果不大;但哪怕不超车,有几次恰好踩上绿波的节奏,35分钟就到了。
四、相关的人生哲学思考(给焦虑的人)
哎呀,老反思人了。大脑像是穿上了永不停歇的红舞鞋。
1.为什么“先做起来”如此重要?
“边际效益递减”原理在人生决策中的美丽镜像。
| 阶段 | 数学特征 | 人生寓意 |
| 从0到1(起步) | vv 很小 → 边际收益极高 | 任何微小的行动都能带来巨大进步 |
| 从90到100(完善) | vv 很大 → 边际收益极低 | 拼命追求最后10%的完美,付出极大但收获甚微 |
只有起步后才能看到真实问题,而不是在脑海里反复预演完美方案。
早期哪怕不完美的行动,只要方向正确,积累的效果会远超预期。
完美主义常常以“不是最好就不开始”的面目出现,它的代价是 零进度。
而数学告诉我们:
从0到1,收益是无穷大(因为从无到有)。
从1到1.1,收益已经比前一步小得多。
从0.9到1,甚至可能不如从0到0.1。
所以,任何一个不完美的开始,都比完美的空想更接近成功。
边际效益最高的时刻,永远是你从静止迈出第一步的那个瞬间。
2.按规则一步步去做
“按部就班”跟着车流走,反而是最聪明、最舒适、最安全也最省油的方式。影响你的不是前车,而是那双由交通信号控制节奏的“看不见的手”。
五、成文方式
在开车上班的路上反复思考→
列出问题以及公式→
和AI反复探讨,结合实际体验,摸索出上班路上的绿波速度为52km/h左右,并生成 Python 代码→
复制进Spyder软件生成曲线→在等孩子打球的体育馆组稿