如何评价智驾状态下的问界汽车追尾前方正在往旁边变道的小米汽车,导致自身右前轮脱落?
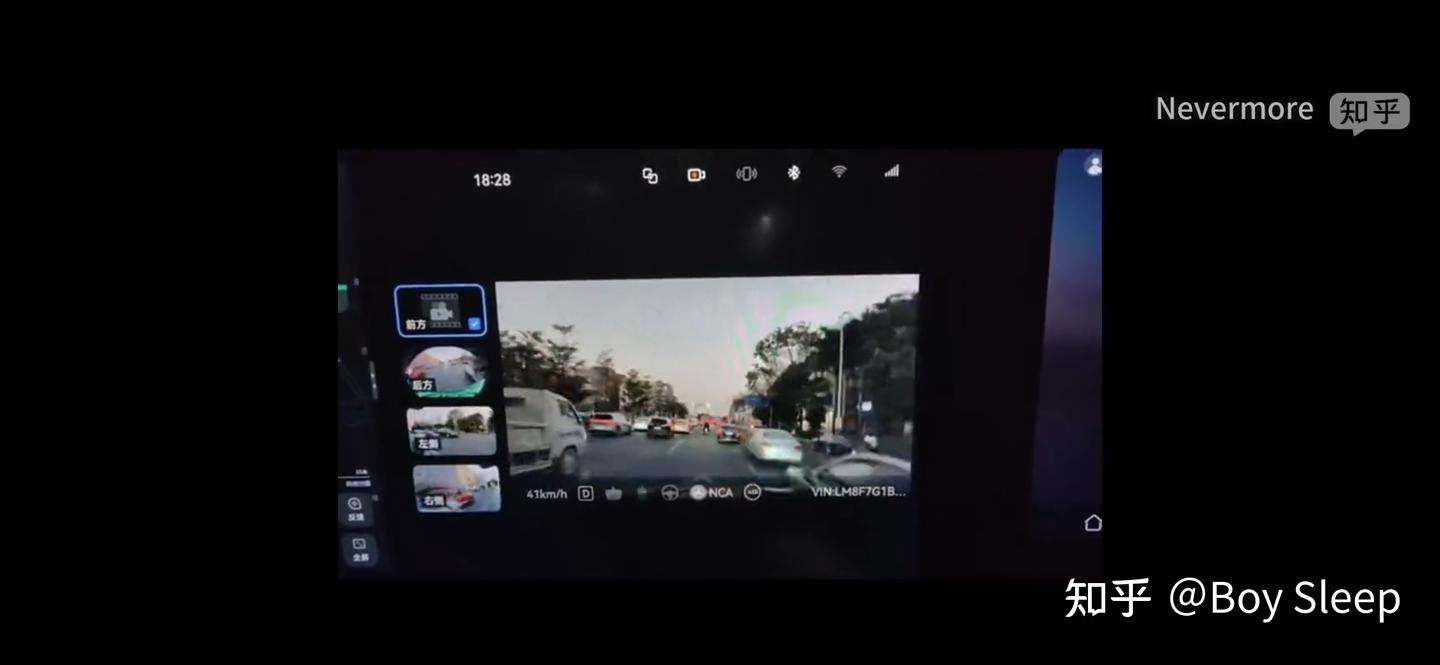
这是碰撞一瞬间得截图。从图中可以看出。NCA是开启状态。碰撞瞬间触发了AEB。过程中似乎油门踏板还在踩下的状态。当然,NCA本身就会踩油门。而且没有Override的提示。所以大概率是NCA自己还处在一个加速的状态。
所以说,大致的状况应该是在碰撞前,这辆问界处在智驾的状态。追尾了正要变道离开的小米。AEB触发的时机极晚。而且在这种交通状况下,问界还在加速。驾驶员全程没有干涉。
个人猜测造成这个问题的原因可能是两个方面。一个呢,是问界对于小米离开车道的速度判断有问题。可能它预计以其速度前进,小米已经应该离开车道,所以不会发生碰撞。或者呢,是它对自身的车辆宽度的判断是有问题的。它认为留出的宽度已经足够,但实际上不够。
当然也可能是两个问题都存在。
之前在高速撞扛着树的老人的时候。这有可能是因为,在自身速度向快的情况下,对横向的低速移动物体的速度判断不准确。
而懂车帝夜间大卡车占道叠加,旁边施工的情况下。问界呈现出来的问题就是,对自身距离和旁边卡车的距离判断有问题。所以出现了侧边小幅叠加的碰撞。
只能说懂车帝那次的测试其实含金量蛮高的。侧后方来车,高速穿插狭窄通道。这些在懂车帝发生碰撞的场景,后面慢慢的一个一个被在现实中复刻。
核心问题可能还是问界的智驾的策略过于激进。为了业绩,导致在安全性方面的出现了一些薄弱性的问题。想当初23年的时候有自媒体就在宣传110码过限宽桩。这种极限场景对于传播智驾能力来说,是效果非常好。但是作为真正上车的智驾策略,一定是有问题的。保守一点的策略呢?只要会让你在开车的时候觉得这个智驾非常犹豫。你觉得需要摆一下方向盘,一脚油门就能绕过去的障碍。保守的智驾就可能会先减速、打方向盘、打灯,然后慢慢绕过去。你就会觉得这个智驾很难用。
而激进的智驾呢?这时可以更极限的解决问题。但是问题来了,太过于极限,一旦这个问题没解决。那就是事故。
尤其在脱离了规则控制的时候。端到端的方式,车的行为都是训练出来的。没有一个精确的边界。这个时候可能以前设定了一些非常精确的边界,非常极限场景下的规则控制的策略,可以做到一些极限的动作。然后你拿这些以前的素材。再来训练新的智驾的什么?没有人工设定的这种精确的边界。AI的不稳定性就有可能在这种极限状态导致意外事故的发生。
至于为什么会踩油门加速?可能是问界的跟车策略,在城市里会让自己贴得比较紧,防止其他车辆加塞。前方出现空当以后,它就会立刻加速跟上。
以正规来说,不管你的车智驾在什么水平,预期到有高风险的状况发生,自己提前接管是最安全的。不要让智驾去应付一些高风险的场景。因为万一智驾出问题,程序出bug也好,AI的不稳定性也好,传感器可能的脏污啊之类的问题也罢。一旦导致,可能发生问题。你可能会连接管的时间都没。
人驾产生的很多事故,AEB,智驾能帮你避免。比如说什么进隧道看不清前面车啦,比如说什么鬼探头啦。比如说疲劳驾驶啊。而如果你看一下各种智驾出问题的视频,会发现,其实智驾出的很多问题,如果你人及时介入,也能够避免。
对吧?像这一次,如果问界车主提前踩一脚刹车,没事了。不管L2还是L3。人和车目前还是互补的,而不是一方能够完全覆盖另一方能力的。
不要把问题全部丢给智驾去解决,用智驾就会更安全一些。