
开了20年车,你可能从未真正"看清"侧后方
驾龄越长,你对后视镜的信任越深——变道前扫一眼,动作行云流水,从没出过事。但你有没有想过:你看到的"一眼",真的就是侧后方的全貌吗?
"我开了20年车,侧后方有没有车,余光一扫就知道了。"这是很多老司机的自信。但统计数据却给出了残酷的答案:超过70%的侧方事故发生在变道过程中,而责任方往往是这些"经验丰富"的老司机。
一、20年驾龄的"视觉自信"——你信任的可能不是后视镜,是运气
老司机对后视镜的依赖刻进了肌肉记忆。变道、超车、汇流,0.5秒完成判断,20年下来你对这面镜子的信任已经不需要思考。
但这份信任建立在一个从未被验证的前提上:你假设镜面里看到的,就是侧后方的真实情况。 凸面镜的变形、低放大倍数的距离压缩、固定视角的盲区——这些从未消失,只是你的大脑习惯了用经验去"补偿"。20年的驾驶经验,补偿的不是后视镜的缺陷,而是你对缺陷的感知。
【引用来源】
●行业共识:驾驶经验可补偿对后视镜缺陷的认知,但无法弥补物理局限
二、法规替你算过这笔账——放大倍数0.29和0.19,你的镜面缩水了多少
UN R46对M1/N1类乘用车外后视镜的放大倍数有底线:驾驶员侧≥0.29,乘客侧≥0.19。
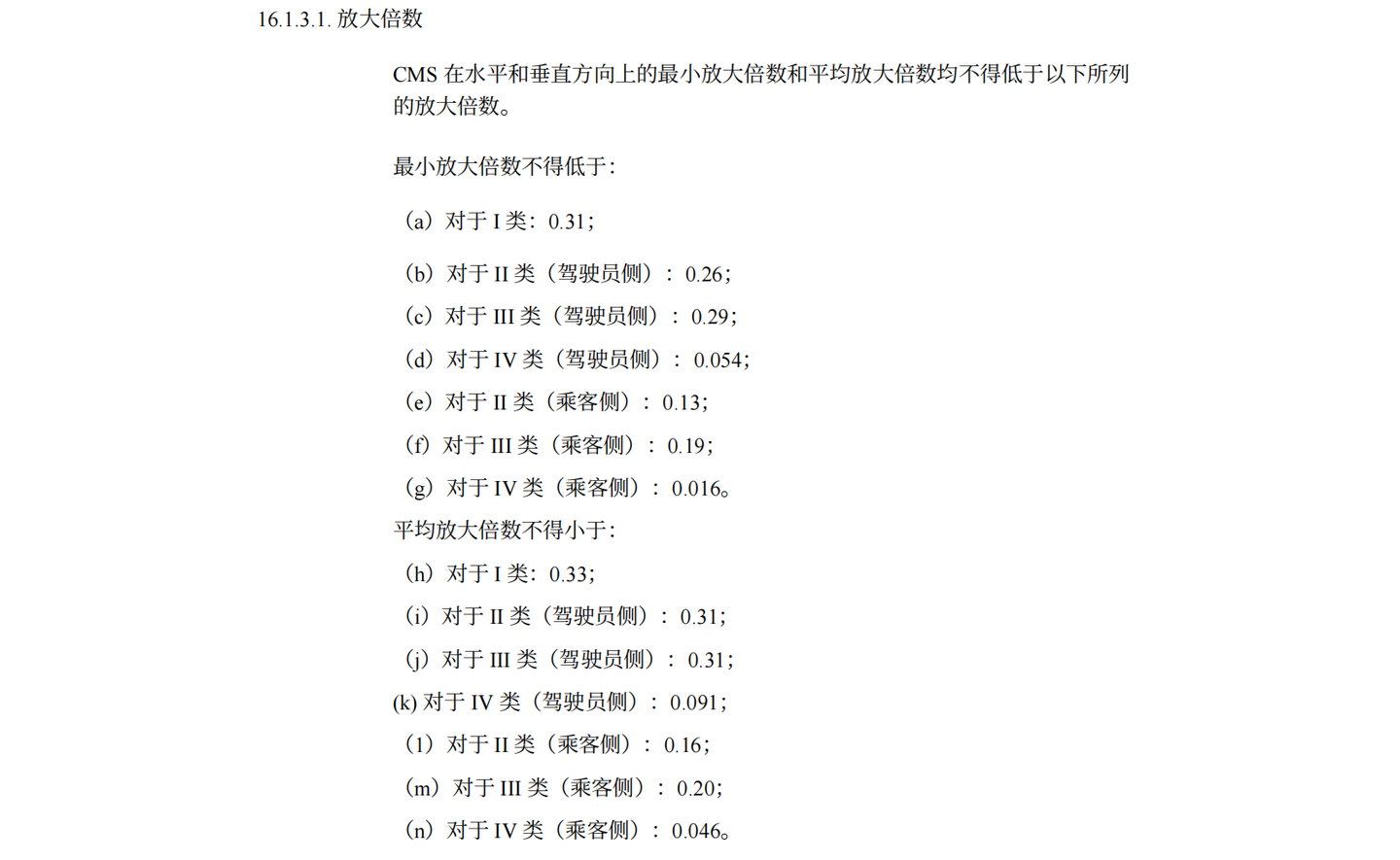
图片来源:UN R46 - 16.1.3.1
翻译成直觉:乘客侧后视镜里的物体,可能只有实际的五分之一大小。一辆距你20米的车,镜中看起来在100米开外;一个距你2米的行人,只是远处一个影子。
这不是镜面质量问题,而是凸面镜扩大视野的物理代价——看得宽,就必须缩得小。 0.29和0.19不是"够用"的意思,而是"不能再低了"的底线。
GB 15084-2022同时要求几何畸变≤20%。但低放大倍数带来的距离误判依然存在:畸变控制画面形状,放大倍数控制画面大小——两道关,传统凸面镜只能过一道。
【引用来源】
●UN R46第16.1.3.1条:驾驶员侧放大倍数≥0.29,乘客侧≥0.19
●GB 15084-2022第4.3.2.12条:几何畸变≤20%
三、为什么开了20年也没"看清"?三个被经验掩盖的物理事实
1. 凸面镜的距离缩水是持续的——你的大脑已经"校准"了失真
老司机凭经验能从凸面镜中大致判断距离——不是镜面给了你准确信息,而是你的大脑通过20年反复验证,建立了"心理校准表"。但校准表只在常规场景有效:窄路会车时墙面的5厘米余量、高速变道时旁车的真实距离——"极限场景"里,经验校准精度不够用。

2. 固定视角的盲区是永恒的——B柱后方的"看不见"从未消失
无论你驾龄多长,传统后视镜的视角是固定的。B柱到C柱之间的侧后方盲区,你看或不看,它都在那里。20年安全驾驶,不是你看清了盲区,而是运气好——盲区里恰好没有车。BSD盲区监测存在的意义,就是填补你"看不见"的那个固定缺口。

【引用来源】
●UN R46第15.2.4.3.1段:III类视野"4米宽、20米远"具体规定
●ISO 16505:2019引言:CMS作为安全相关系统的功能安全要求
四、从"经验补偿"到"画面确认"——CMS如何让你真正"看清"
侧方CMS对"看清"的定义,不是让你看得更舒服,而是让判断不再依赖经验校准。
●畸变≤20%+数字校正——CMS通过算法对画面做几何校正,将变形控制在20%以内。距离判断不再需要"心里换算"。
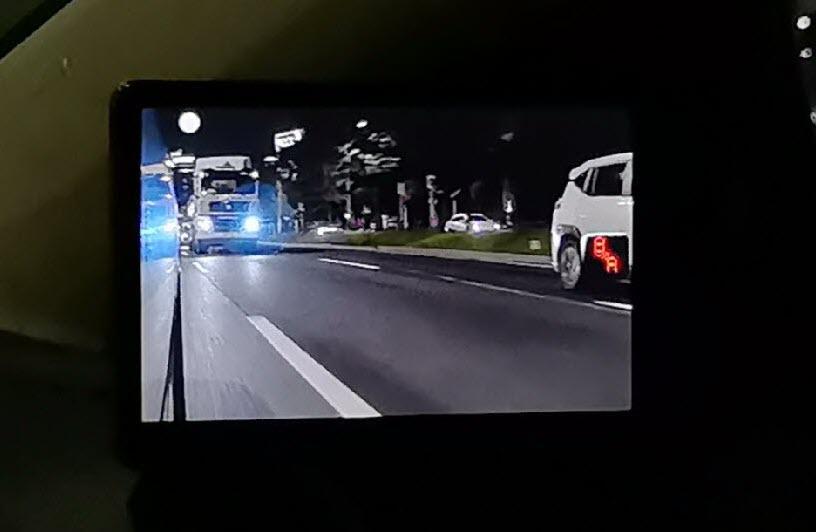
●宽动态120dB——暗光和强光下,CMS画面的明暗层次始终可辨。你不需要等眼睛适应,画面已经替你呈现了。

●集成BSD盲区监测——B柱盲区,BSD主动替你盯着。从"被动看"到"主动防",CMS补上了经验永远补不上的缺口。
系统延迟低于60毫秒——远优于法规200毫秒上限。变道那0.5秒,你扫一眼看到的就是此刻的真实状态,不是残影。

【引用来源】
●GB 15084-2022第4.3.2.12条:几何畸变≤20%
●ISO 16505:2019第6.7.2.1条:系统延
迟<200ms
五、20年驾龄配得上一面真正"看清"的镜子
在III类视野场景中,深圳市昂星科技旗下的MATEGO®美特高系列产品通过畸变校正、120dB宽动态、BSD盲区监测、低于60毫秒延迟,让侧后方画面不再依赖经验补偿。

你开了20年车,积累的是判断力——但判断力的前提,是你看到的画面值得信任。
从"经验补偿"到"画面确认",侧方电子后视镜让你真正"看清"侧后方——这和驾龄无关,和镜子的物理上限有关。