汽车总线(二)为何需要多条CAN总线?
本篇汽车总线系列的第二篇,之前我们了解了几种基础的汽车总线:can、lin、车载以太网、mipi等,也从总线的物理特性知道为什么can和车载以太网可以承担主干网的职责。但不知道有没有注意到,其实车上有很多条CAN:ECAN、BCAN、DCAN、CCAN、LPCAN、BLCAN等等,那么这些can都有什么用,为什么车上要有那么多条CAN总线呢?
本文就从这个问题出发,从「ECAN、BCAN、DCAN、CCAN、LPCAN、BLCAN都有什么作用?–> 在一辆车上为什么要分这些CAN信号?提升总线实时性和删选有用信号,还有其它作用吗?–> 这些CAN彼此是相通的吗?一个控制器可以同时接入多个CAN总线吗? –>那整车EEA设计时,不同的ECU需要遵循什么样的原则挂在相应的总线上?」来总体介绍下各条CAN的作用以如何通过多条总线设计实现安全的冗余和实时性。
PS: 以下涉及到的CAN总线分类和ECU不涉及任何具体一款车,纯粹就是一种概念上的描述。
一、不同 CAN 网段的功能定位(纯粹OEM厂标,各有各的标准)
车载 CAN 总线的命名规则,本质是按功能域、信号实时性、安全等级进行划分,不同车企的命名可能略有差异,但核心功能域的划分高度一致。各类 CAN 网段的具体作用如下:
- ECAN(动力驱动 CAN / 增强型 CAN)整车的 “动力中枢”,主要承载新能源汽车高压系统或传统燃油车动力系统的核心控制信号,涵盖整车控制器(VCU)、电机控制器(MCU)、电池管理系统(BMS)、高压配电盒(PDU)等关键部件。其传输速率达 500Kbps~1Mbps,信号优先级最高,直接影响车辆动力输出与行驶安全,需满足 ISO 26262 ASIL-D 最高安全等级要求。
- BCAN(车身控制 CAN)定位为 “车身舒适系统神经”,负责车身电气与舒适性设备的信号传输,涉及车身控制模块(BCM)、空调控制器、座椅调节模块、灯光控制器、中控屏等部件。该网段数据量大但实时性要求适中,速率多为 125Kbps~500Kbps,安全等级为 ASIL-B,是连接车身舒适性设备的核心网段。
- DCAN(诊断 CAN)承担 “车辆健康监测通道” 的角色,核心功能是故障诊断、ECU 程序刷写与数据标定,连接 OBD 诊断接口、远程信息处理终端(T-BOX)与各域控制器,支持 ISO 15765 诊断协议。其速率固定为 500Kbps,通过网关与其他网段物理隔离,避免外部诊断设备的操作干扰整车动力与底盘控制,安全等级为 ASIL-B。
- CCAN(底盘控制 CAN)整车的 “安全防线”,聚焦底盘行驶安全系统,涵盖防抱死制动系统(ABS)、电子稳定程序(ESP)、电动助力转向(EPS)、电子驻车(EPB)、空气悬架控制器等部件。该网段对实时性要求极致,传输延迟需控制在毫秒级,速率达 1Mbps,安全等级为 ASIL-D,是保障车辆行驶稳定性的关键网段。
- LPCAN(低速 CAN)车载网络的 “辅助通道”,全称Low-Speed CAN,遵循 ISO 11898-3 标准,速率通常在 125Kbps 以下,专门连接实时性要求极低的辅助执行设备,比如车窗升降电机、后视镜调节模块、雨刮控制器、车内氛围灯等。该网段硬件成本最低,可使用普通非屏蔽双绞线,安全等级为 ASIL-QM(质量管理等级),常作为 BCAN 的补充网段分担低优先级信号。
- BLCAN(蓝牙系统 CAN)车载 “智能互联接口”,专门承载蓝牙主机、NFC 钥匙模块、无线充电控制器的通信,负责蓝牙配对、钥匙身份认证、无线充电状态反馈等信号传输。其速率与 LPCAN 一致(125Kbps),属于低速 CAN 范畴,安全等级为 ASIL-QM,部分车型会将其直接并入 LPCAN 或 BCAN,以简化网络架构。
二、为什么需要这么多条CAN?——远不止”提升实时性”
1. 功能安全隔离:ASIL等级的刚性约束(ISO 26262核心)
- ASIL-D系统必须物理隔离:
- 制动(CCAN)、转向(CCAN)、气囊(CCAN)等ASIL-D系统必须独立总线,避免与低安全等级系统(如空调)共享总线导致故障扩散。
- 案例:若BCAN(车身CAN)因车窗电机故障拥塞,ECAN(动力CAN)仍能保障发动机控制的1ms响应。
2. 实时性保障:避免总线拥塞的工程铁律
Vector CAN总线测试报告表示:CAN总线负载率每增加5%,平均延迟上升20%
| 总线类型 | 负载率阈值 | 临界延迟 | 影响系统 |
| ECAN/CCAN | < 50% | < 1ms | 发动机控制、制动系统 |
| BCAN/LPCAN | < 70% | < 10ms | 车窗/灯光/空调 |
| 超过阈值 | > 70% | > 100ms | 系统失效(如制动延迟) |
3. 冗余设计:安全冗余的物理基础
- 双CAN冗余架构(如CCAN双通道)。
- 避免”单点失效”:若所有系统共用一条CAN,总线故障将导致整车瘫痪。
4.降低硬件与布线成本
不同速率的 CAN 网段对硬件的要求差异极大:高速 CAN(ECAN/CCAN)需使用屏蔽双绞线与高抗干扰收发器(如 TJA1050),成本较高;而低速 CAN(LPCAN/BLCAN)可使用普通非屏蔽双绞线,硬件成本降低 30% 以上。按速率需求划分网段,可实现 “按需配置”,避免为低速设备配备高速硬件,大幅降低整车网络的硬件与布线成本。
三、互联互通:CAN 网段的通信桥梁与多接口 ECU
多条 CAN 网段并非孤立运行,整车的正常工作需要各网段间的数据交互;同时,部分核心 ECU 需要接入多个网段,以实现跨域控制功能。
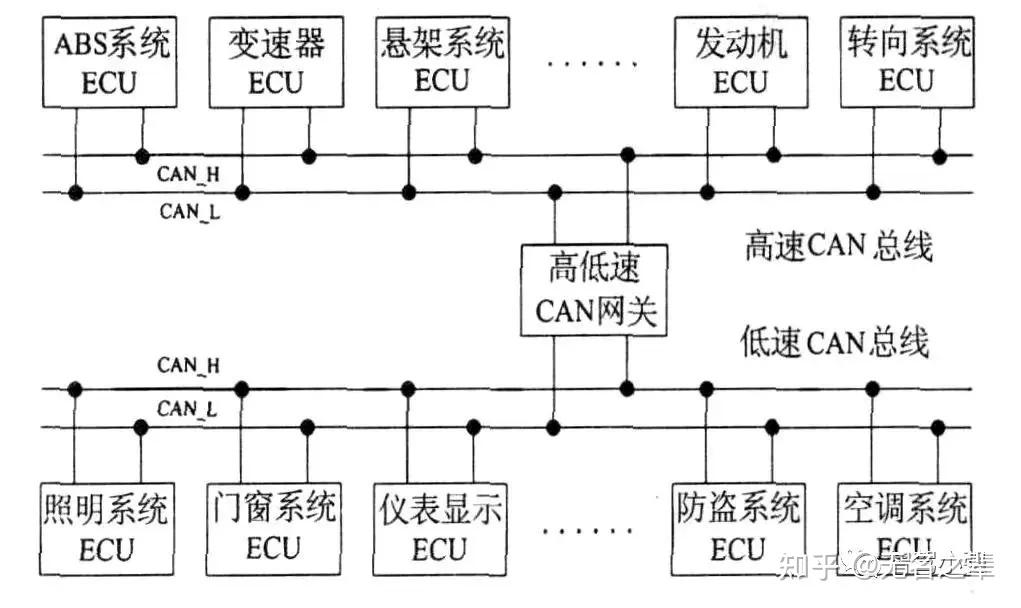
1. 网段互联的核心:网关或域控制器(当下各域控制器也充当不同网段数据转发的职责)
不同 CAN 网段之间无法直接通信,需通过网关实现数据转发与协议转换。网关是车载网络的 “路由器”,具备多通道 CAN 接口,可连接动力、底盘、车身、诊断、低速等多个网段,其核心作用有三点:
- 数据转发:将某一网段的关键信号转发至其他网段,例如将 ECAN 的电池 SOC 信号转发至 BCAN,用于仪表显示;将 CCAN 的车速信号转发至 DCAN,用于故障诊断。
- 协议过滤:根据预设规则筛选信号,仅转发必要数据,避免无效信号占用总线带宽。
- 故障隔离:当某一网段出现故障时,自动切断该网段与其他网段的连接,防止故障扩散。
2. 支持多 CAN 接口的核心 ECU
部分关键 ECU 需要同时接入多个 CAN 网段,以实现跨域控制功能,这类 ECU 通常集成双 CAN 或多 CAN 控制器接口。
典型案例 1:整车控制器(VCU) —— 同时接入 ECAN(接收 BMS、MCU 的动力信号)、CCAN(发送动力控制指令至 ESP)、DCAN(接收诊断指令并反馈故障码),是整车的 “中央控制单元”。
典型案例 2:车身控制模块(BCM) —— 同时接入 BCAN(接收空调、座椅的控制信号)、LPCAN(发送控制指令至车窗、雨刮电机),实现车身舒适系统的统一管理。
四、EEA 设计核心:ECU 挂接 CAN 总线的五大原则
在整车电子电气架构(EEA)设计中,不同 ECU 挂接至对应 CAN 总线并非随机分配,而是需遵循五大核心原则,确保网络的实时性、安全性与成本最优。
1. 功能域归属原则
这是 ECU 挂接的首要原则:同一功能域的 ECU 必须挂接至同一 CAN 网段,减少跨网段数据交互,降低网关转发压力。
- 动力域 ECU(VCU、MCU、BMS)→ 挂接 ECAN;
- 底盘域 ECU(ABS、ESP、EPS)→ 挂接 CCAN;
- 车身舒适域 ECU(空调、座椅、灯光)→ 挂接 BCAN;
- 低速辅助 ECU(车窗、雨刮、后视镜)→ 挂接 LPCAN;
- 智能互联 ECU(蓝牙主机、NFC 模块)→ 挂接 BLCAN。
2. 实时性与速率匹配原则
ECU 的信号实时性要求需与总线速率严格匹配,避免 “大马拉小车” 或 “小马拉大车” 的资源浪费。
- 实时性要求极高的 ECU(如 ESP、VCU)→ 挂接 1Mbps 的高速 CAN(ECAN/CCAN);
- 实时性要求中等的 ECU(如空调、仪表)→ 挂接 500Kbps 的中速 CAN(BCAN);
- 实时性要求极低的 ECU(如车窗、氛围灯)→ 挂接 125Kbps 以下的低速 CAN(LPCAN/BLCAN)。
3. 安全等级同源原则
安全等级相同的 ECU 需挂接至同一网段,避免高安全等级网段被低安全等级设备拖累,同时简化功能安全认证流程。
- ASIL-D 等级的 ECU(VCU、ESP、ABS)→ 只能挂接 ECAN/CCAN;
- ASIL-B 等级的 ECU(BCM、T-BOX)→ 挂接 BCAN/DCAN;
- ASIL-QM 等级的 ECU(车窗电机、蓝牙模块)→ 挂接 LPCAN/BLCAN。特别注意:高安全等级网段严禁接入低安全等级 ECU,防止低安全等级设备的故障引发高安全等级网段的信号异常。
4. 带宽负载可控原则
某一网段挂接的 ECU 数量,需以总线负载率不超过 50% 为上限,预留足够的带宽冗余,应对后期功能升级。例如:一条 1Mbps 的 ECAN 网段,若单个 ECU 的平均数据传输量为 10Kbps,则最多可挂接 50 个 ECU(50×10Kbps=500Kbps,负载率 50%);若超过此数量,需拆分网段或升级为 CAN FD(带宽最高 8Mbps)。
5. 成本最优原则
在满足性能要求的前提下,优先将 ECU 挂接至低成本的低速网段,或复用现有网段,避免新增网段带来的硬件与布线成本增加。例如:蓝牙模块的实时性要求极低,可直接挂接 LPCAN,无需单独部署 BLCAN;雨刮控制器、后视镜调节模块可共用 LPCAN 网段,减少总线数量与网关接口数量。
结语:多CAN不是”冗余”,而是”安全架构的基石”
在整车EEA设计中,ECU挂载总线的原则是安全与效率的平衡:
- ASIL等级是最高准则(ASIL-D必须独立总线)
- 功能域划分是落地路径(动力→ECAN,车身→BCAN)
- 负载约束是工程保障(避免总线拥塞)