大概多少比例的用户能感受汽车底盘性能差异?
有两个细节是车评人非常爱提的,一个是方向盘线性不线性,二是一辆车能否给人以驾驶信心感,那么这俩概念的依据是什么?其实这个领域,车评人已经在向主观评价工程师看齐了,但作为普通观众,我们如何去区分车评人哪句话是真的,哪句话是充值?特别是本期,老王还会分享几个,在短时间内比如你在试车时,怎样用一些简单但专业的操作来对一辆车的转向安全感进行一个评价,点击收藏关注,咱们现在开始。
一、车辆的可操纵性
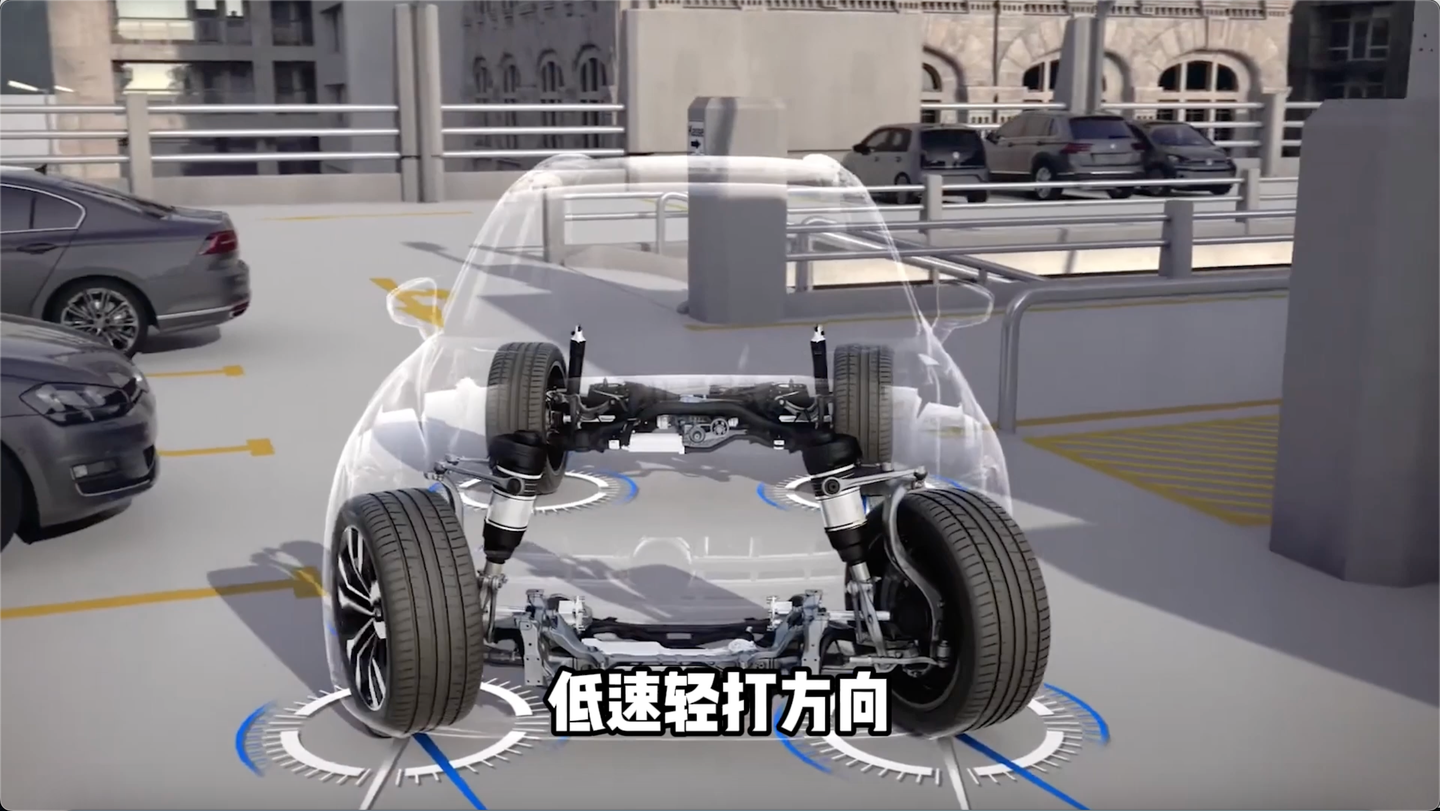
车辆的可操纵性,顾名思义,是一辆车可以被操纵来改变行驶方向或轨迹的能力。在试一辆车时,大家试着让自己进行一个车速的划分,小于20公里你打方向,从设计角度,都属于驻车行为,啥意思,就是这个时候的转向和悬架设计是为了方便你挪车和停车用的,不能拧好几圈方向盘,轮胎都不怎么动,也不能稍微拧一下,车辆就有横摆加速度,这些都是设计不成功的体现。一般来讲,低速轻打方向,车辆横 摆加速度都得小于人体最低感受范围,也就是0.2个g,而且还要给驾驶员一个不易察觉的轮胎滑移,方向盘手力和灵敏度也要有保证。
同理,20-50公里的低速工况,轻打方向变道也不应该有强烈的横向加速度感知,紧急避让情况,尤其是弯道的紧急避让,有时能达到0.4g左右的侧向加速度,这个时候是肯定有强烈感知的,但一辆车是否让人有信心的考量点,就变成了转向力度是否适中,以及是否满足对下一秒车子该往哪里走的这个期望了。其实如果你去看某个车评人,他只强调转向轻不轻,而忽略车速、路况和驾驶模式,大概率这人不太了解车辆构造,很可能还不如普通用户。
之前给大家推荐过吴旭亭教授的一本著作,来自机工社的《乘用车底盘系统开发》本期我再推荐一次,这应该是我这半年在悬架领域,看的最好的一本,书中第六章列了张表,作为用户,你自己本身也是一位主观评价者,做不到高速工况,你低速在变道和弯道情况下感受一下,只要脑子里带着这个简单的框架,就可以给出一个相对专业的评价。
| 侧向加速度 | 0-0.1g | 0.1-0.2g | 0.2-0.4g | 轮胎极限被突破前 |
| 50kph-极限车速 | 直线行驶 | 变道 | 弯道 | 紧急避让+极限驾驶 |
| 20-50kph | 小区低速路 | - | ||
| <20kph | 驻车 | - | - |
二、司机打转向时,车子在干什么?
那么更进一步,如果你能想象到司机打转向时,车子在干什么,就更厉害了。其实驾驶员在转向这个动作做出来后,转向系和车辆是有一个响应过程的。
方向盘背后的转向柱,引发扭杆弹簧变形,产生助力推动齿条位移,牵引转向拉杆拉动转向节,引发轮胎产生侧偏力,这些动作做完之后,车身才会产生质心转移和侧向力,进而通过侧向加速度反馈到人的大脑中。
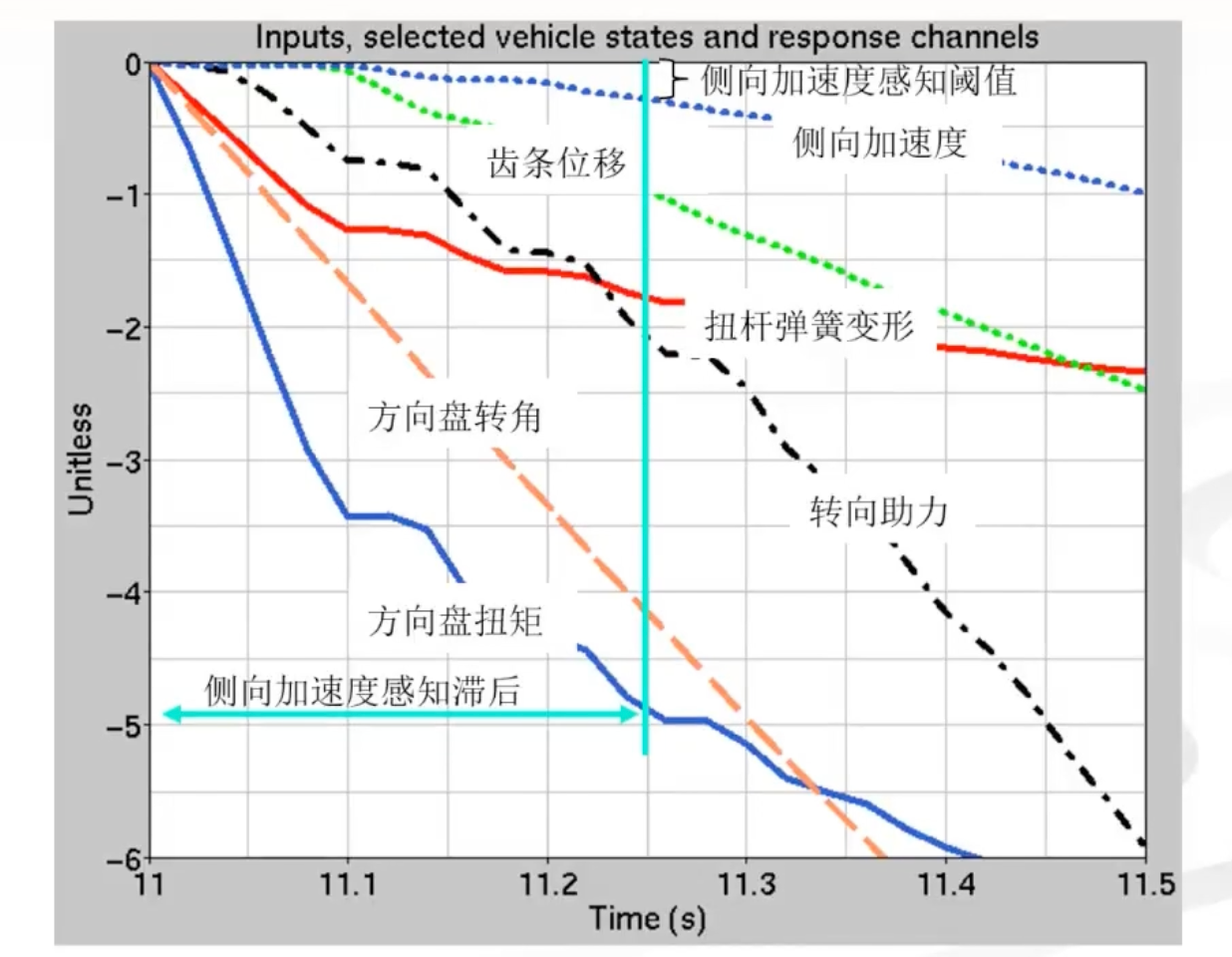
所以驾驶员开始有侧向加速感的时候,意味着转向系统早就做出动作了。转向意图和产生感受之间的这个滞后值,不同速度下需要有一个合理的变化,而且这个变化越线性,车子越好开。那么衡量和调整这些参数,就是一门学问了。
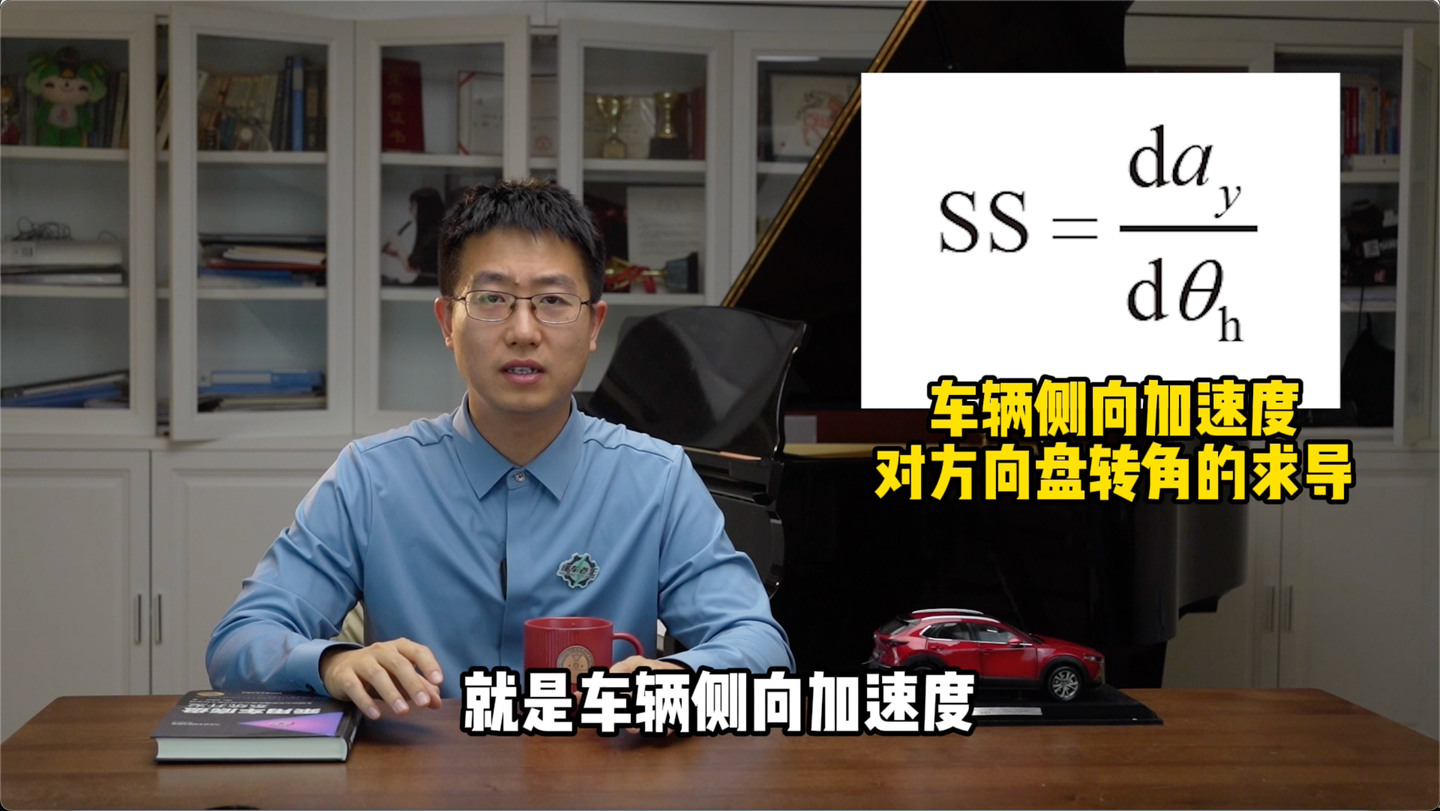
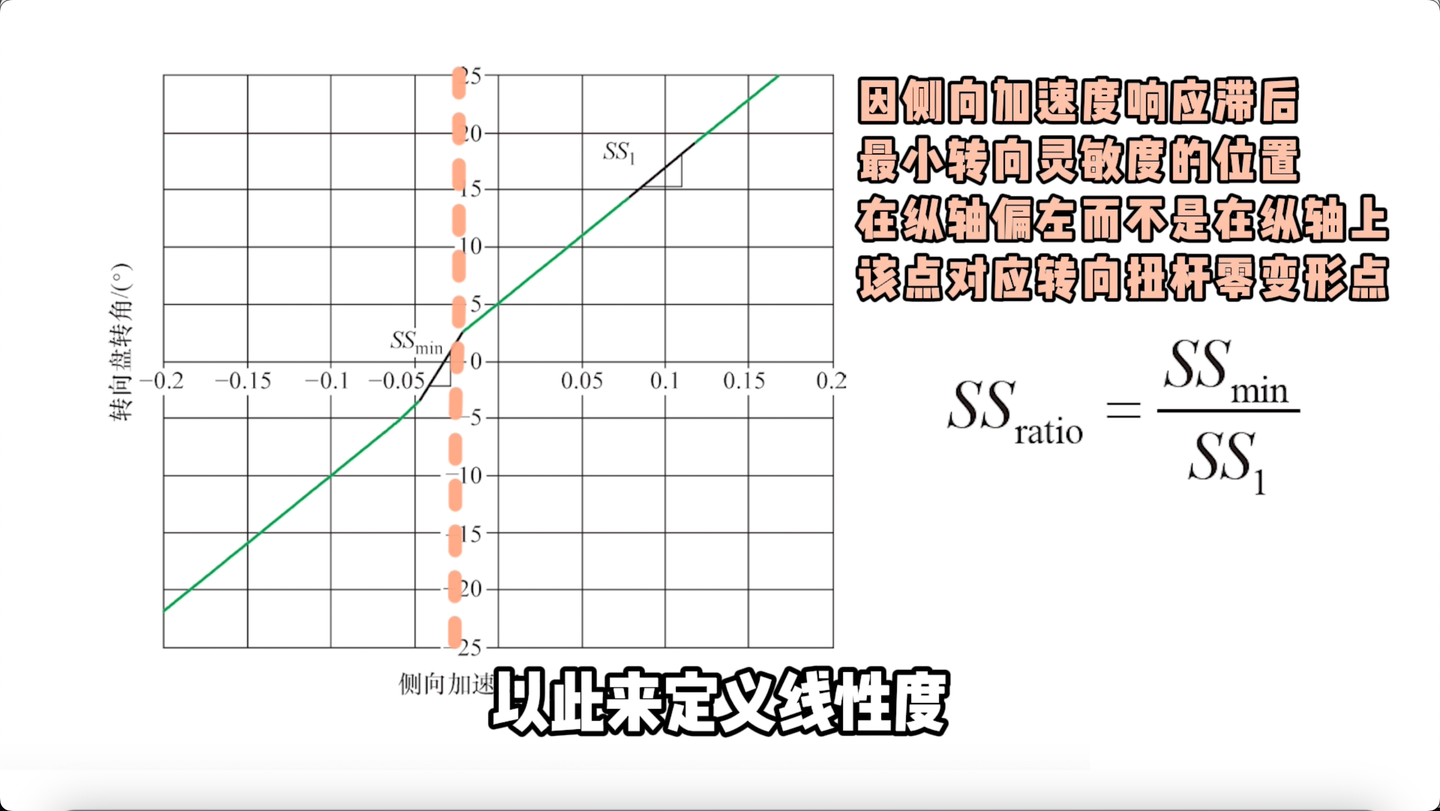
学术上定义一个叫转向灵敏度的东西,就是车辆侧向加速度对方向盘输入角的导数。刚才我说了,转向系统有个滞后,那么如果把侧向加速度和方向盘转角进行坐标系展开,就是这条曲线。
这张图非常有名,教科书里都有,根据公式来看,转向灵敏度就是这条曲线的斜率,最小转向灵敏度就是中间这一块,这块区域啥意思?
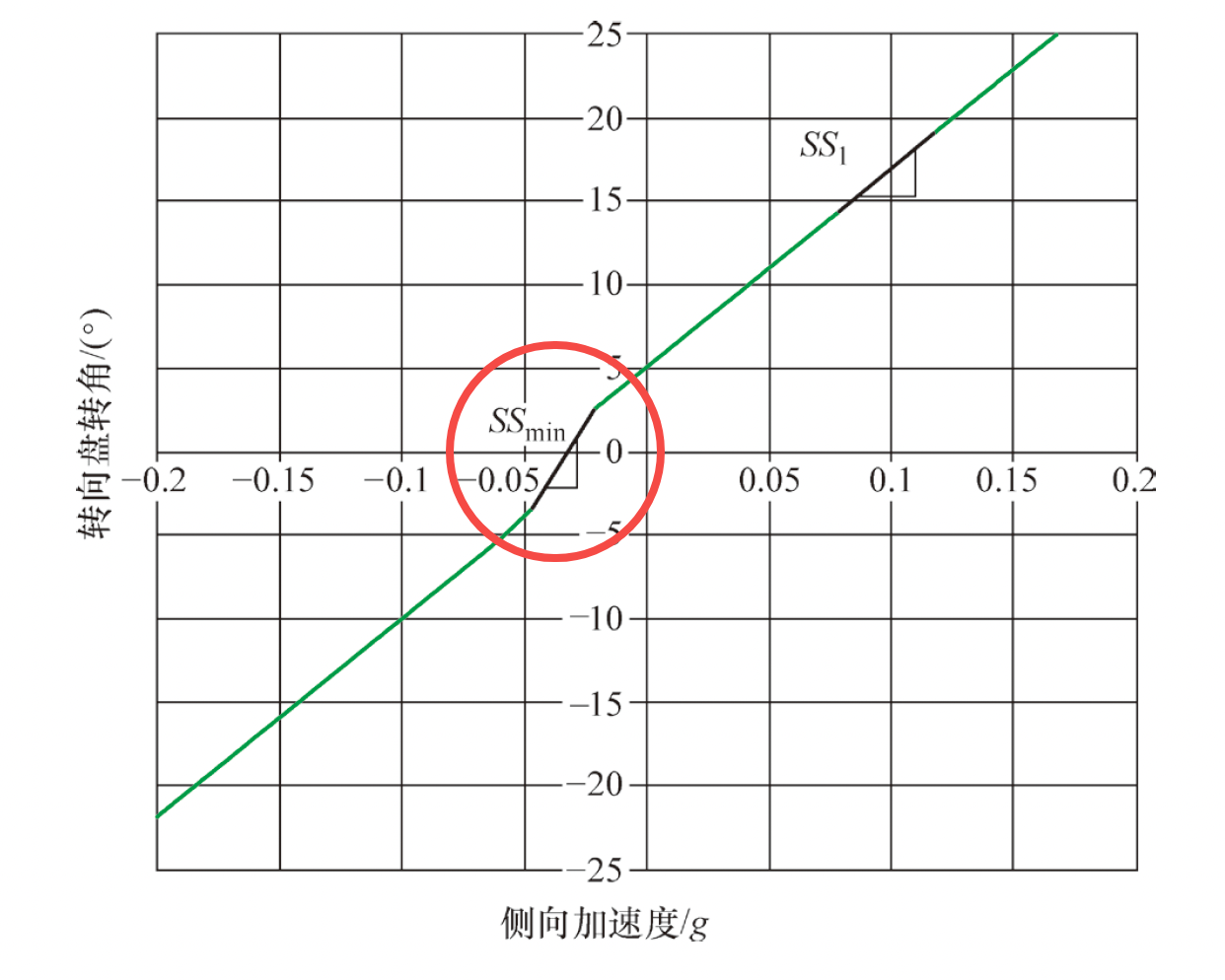
相当于,你方向盘在这个区域内打多少度,车辆转向是没有明显动作,这跟你用读数显微镜测量时,你的手柄螺丝回转产生的空程差类似,测量中强调避免这种误差,汽车工程反而强调的是利用它,怎么利用呢?
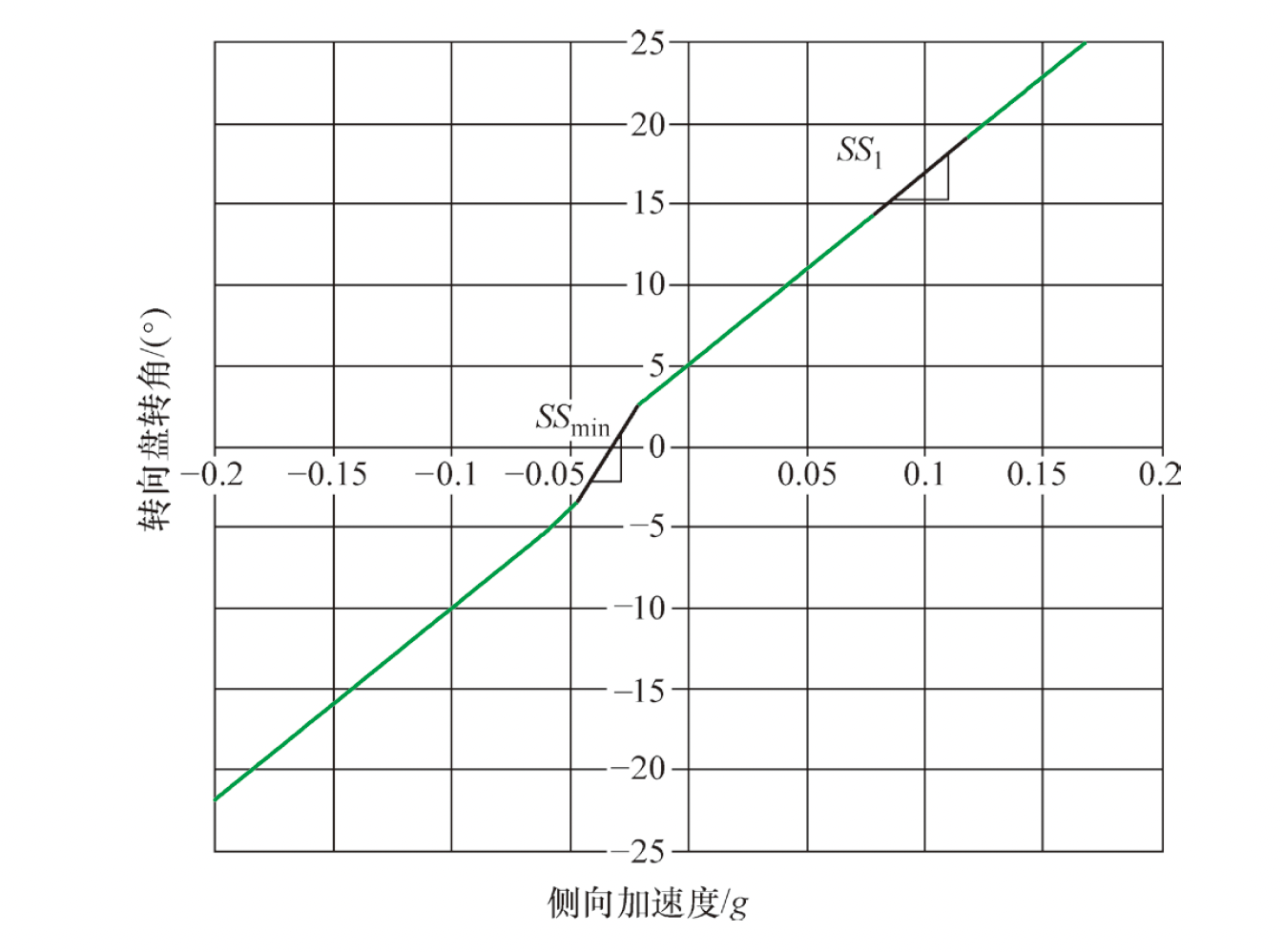
刚才我们讲过,所有的车,方向盘你稍微拧一点,你是感受不到侧向加速度变化的的,因为它低于人的最低感知阈值,俗称方向盘死区,这个区域内不代表车辆没加速度,为了更加细致地量化,工程师又有个新定义,就是死区内外不同的灵敏度,也就是这两段曲线他们各自的斜率做一个比值,以此来定义线性度,这个比值越接近1,车辆灵敏度的线性度越好,注意,是叫做转向灵敏度的线性度。
很多人不理解,翻译成白话就是一辆车,不是不灵敏,而是转向发贼,我记得早期的2013款Model S转向就是这毛病,但后续型号修正了。
三、转向力矩梯度和转向助力种类
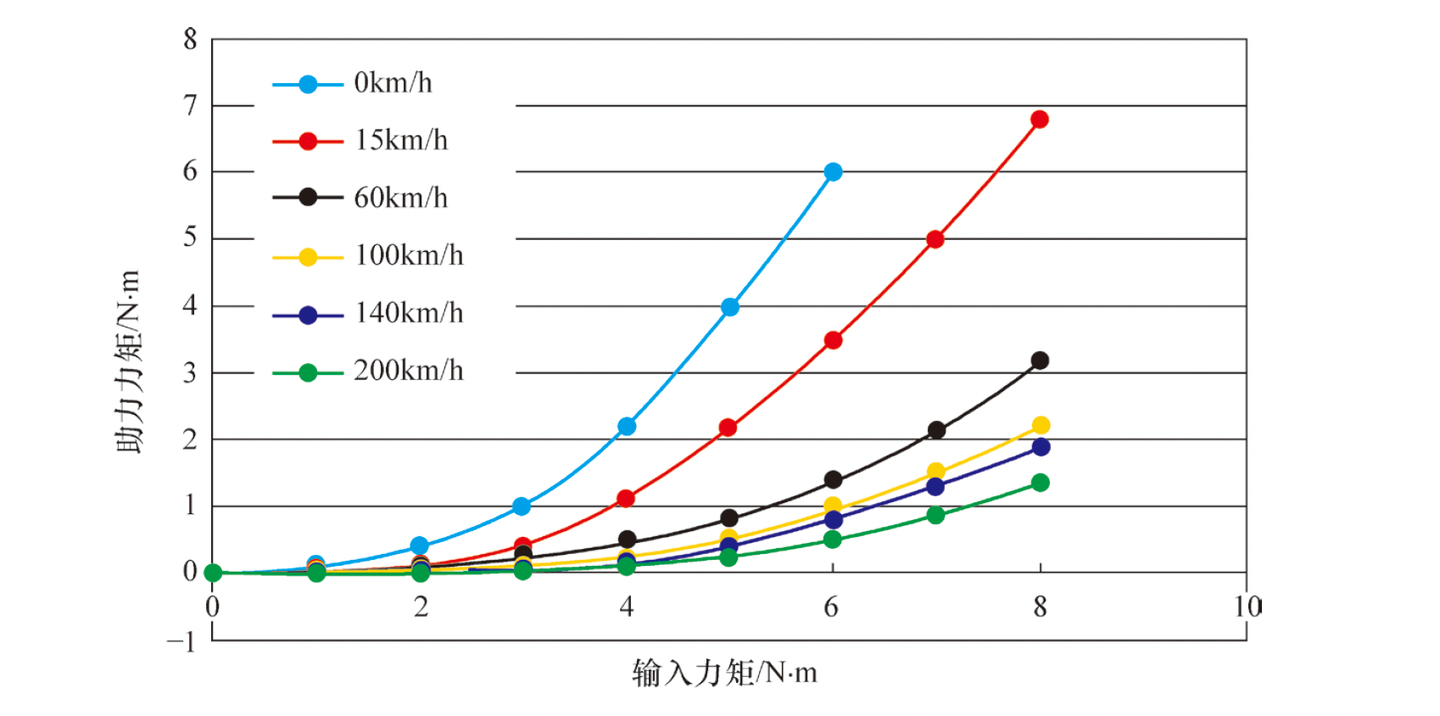
当然,说到这,就不得不提到驾驶员感受最多的东西,就是方向盘手力,手力这东西牵扯很广,包括但不限于你用多大劲去拧方向盘,以及方向盘给你多大劲来反馈你进一步的动作,这些细微的感知在评价车辆时极其重要!现在很多人的认知都是反的,只知道有助力,不知道有手力,实际上手力和助力互相作用才是作用到车辆转向和悬架上的力。现如今几乎所有车辆都安装了手力随速度可调的转向系统。
如果车辆行驶方向发生变化,驾驶员手力自然有反馈,一辆车变道或转向时,随着方向盘转角增加,侧向加速度逐渐被你感知到,此时你希望方向盘的力矩要起到提升安全感的作用,你想一下,如果过弯或者变道时,随着你侧向加速度提升,方向盘给你感受到一种断崖式下跌的感觉,那肯定会让你心里没底,一紧张没准就甩出去了,如果转向力矩越来越大,到一定程度驾驶员可能会掰不动,保持转向舵位的手力可能会变得越来越难以维持,这样肯定也不够舒适,所以很多时候,转向力矩随着侧向加速度是逐渐增加但趋于饱和的这么一个过程。表达在转向力矩曲线上,就是随着加速度逐渐增加,力矩也跟着增加,只不过增加的斜率是逐渐降低的,最后趋于平缓。
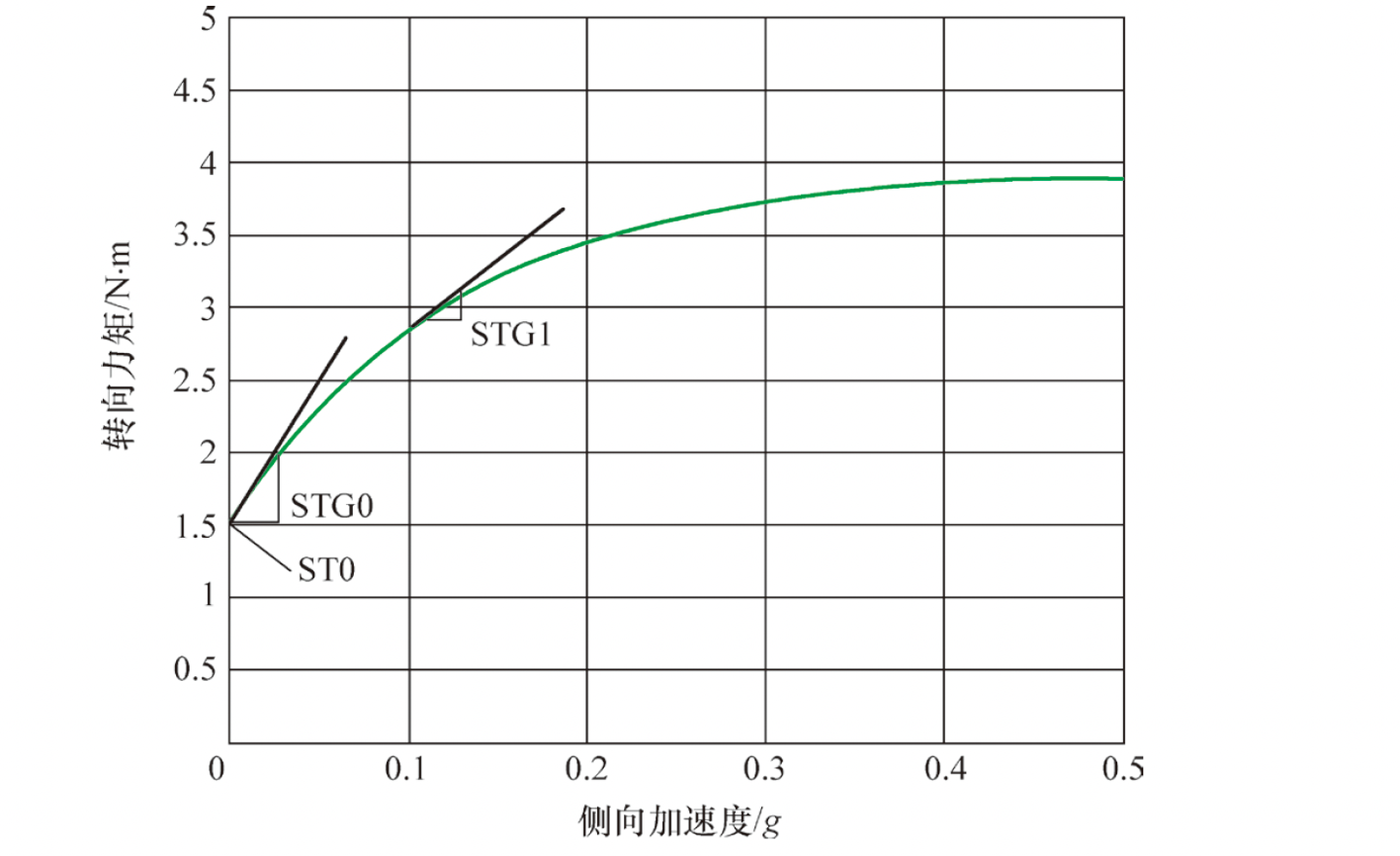
转向力矩在工程上用梯度来定义,不过如果你不是车辆开发者的话就不用去用这个公式,你可以片面理解,这是车辆状态变化反馈的一种合理铺垫,之所以老王说这里是片面理解,其原因就是转向力矩曲线还不完全是反馈到驾驶员这里的手力,他们之间随着不同速度和需求是有一个推导关系的,简单来说,转向力矩和灵敏度曲线是根基,转向助力系统的阻尼的反馈控制是锦上添花。
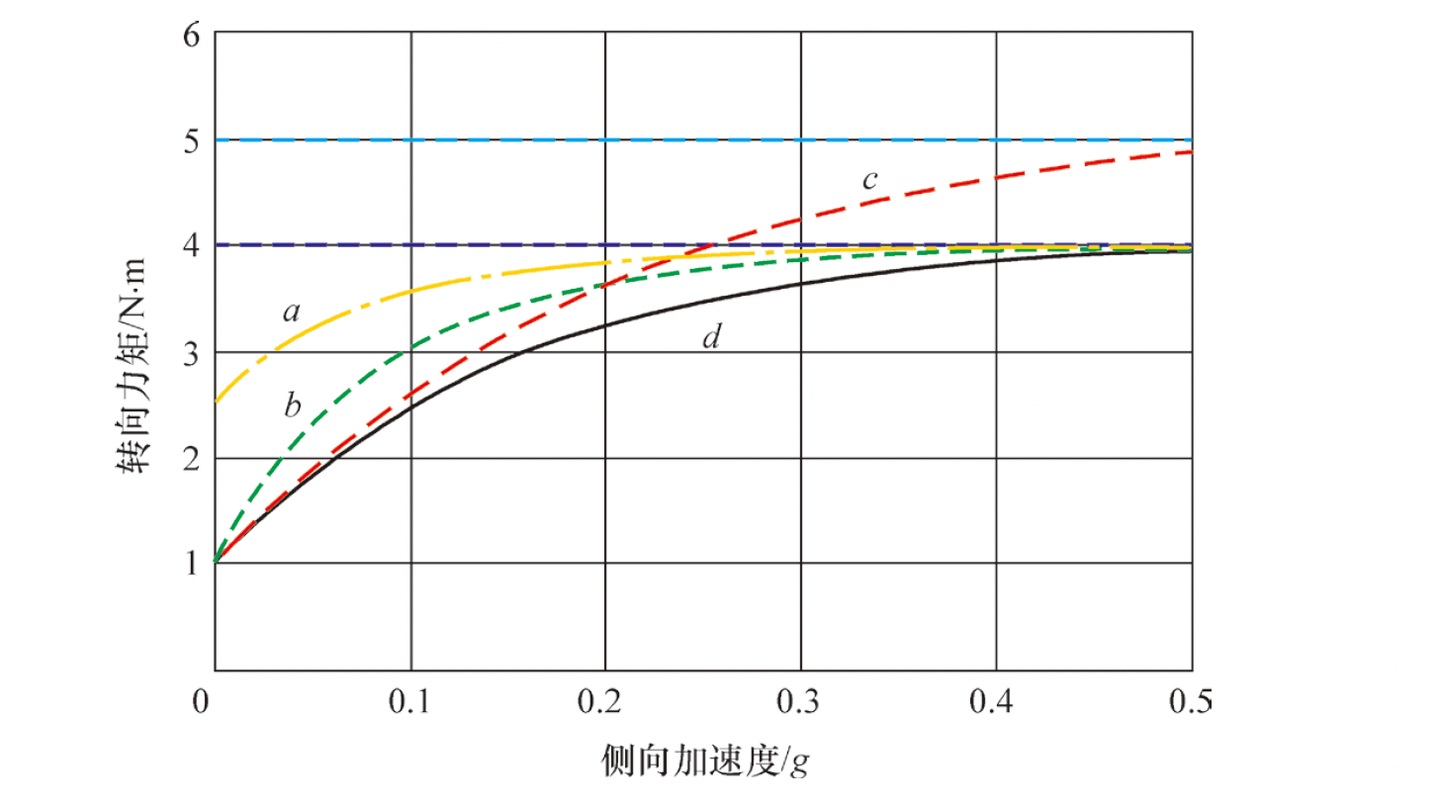
那么说到这,就不得不说随着时代不断进步,转向系统品种变得多样化起来了。比如在液压时代,这条曲线只与系统压力有关,我们很难多样化调整助力和转向手感。那么现如今发展到EPS转向,是系统与机械束缚逐渐脱开的这么一个过程,甚至可以根据不同车速和驾驶模式给出不同的转向力矩曲线。
四、转向机的种类-什么是EPS?
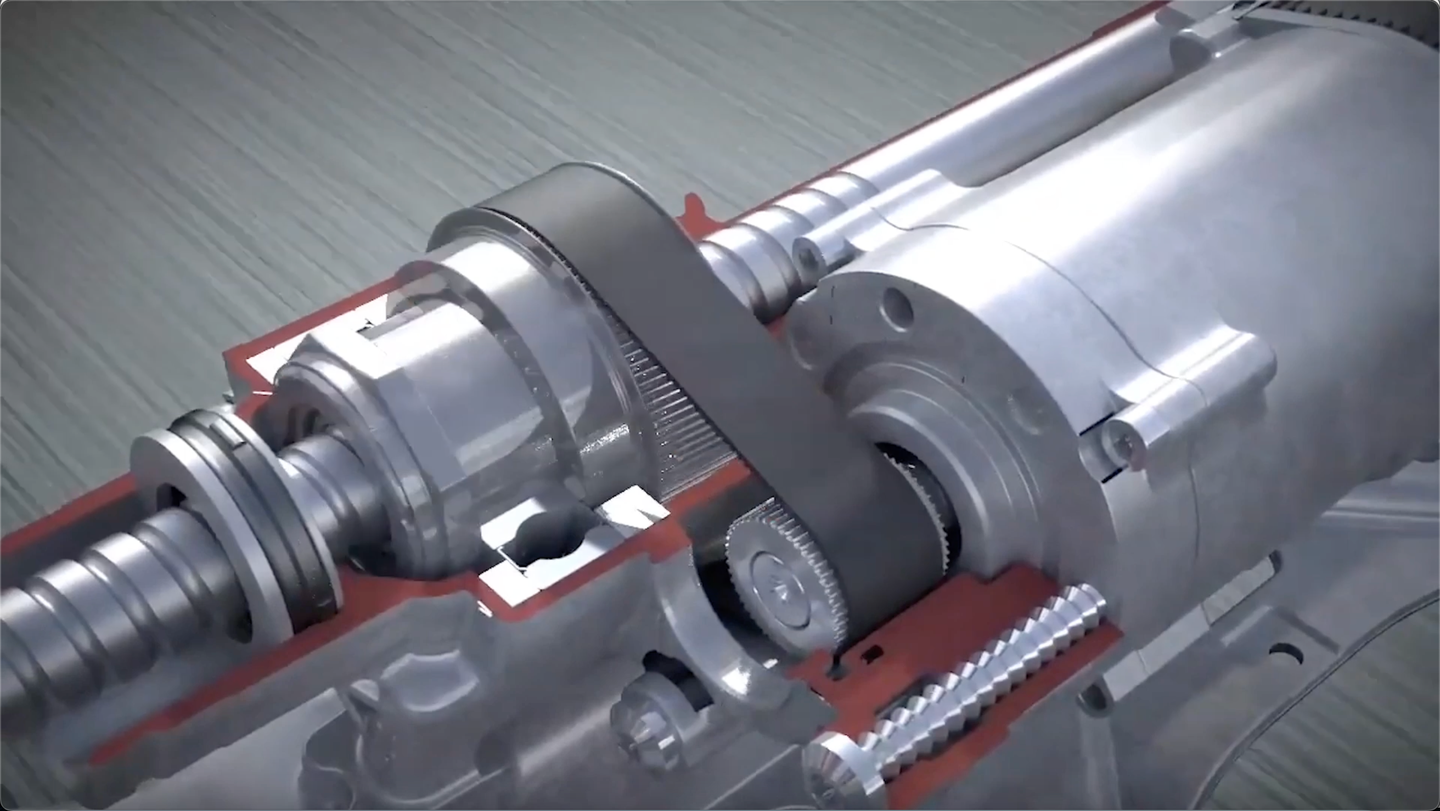
EPS还有不同细分类型,比如管柱助力C-EPS无论做的多好,对一辆车操控的贡献都不大,因为转向柱刚度会干扰灵敏度,唯一的好处是便宜。小齿轮助力式比转向柱助力好的地方在于电机的调节范围和能力更大,但这两种一般来讲都是没有顶级的齿条助力式R-EPS好,比如Model 3再被人喷,他也是R-EPS的,还有就是奥迪A7L卖的再差,它也是顶级转向,之前老王还拆过一些车的R-EPS,它电机和滚珠丝杠是通过皮带传导的,皮带两端不同半径的齿轮为一级减速,滚珠螺母是二级减速,除了这种形式,还有一种REPS是电机直接装在转向齿条上的,这两种都是目前比较好的转向系。
| 名称 | 英文 | 缩写 | 图例 |
| 管柱式电子助力 | Column drive-EPS | C-EPS | |
| 小齿轮式电子助力 | Pinion drive-EPS | P-EPS | |
| 双小齿轮电子助力 | Dual Pinion drive-EPS | DP-EPS | |
| 齿条平行式电子助力 | Parallel Axis EPS | PA- EPS | |
| 齿条同轴式电子助力 | Rack-Direct EPS | RD- PES |
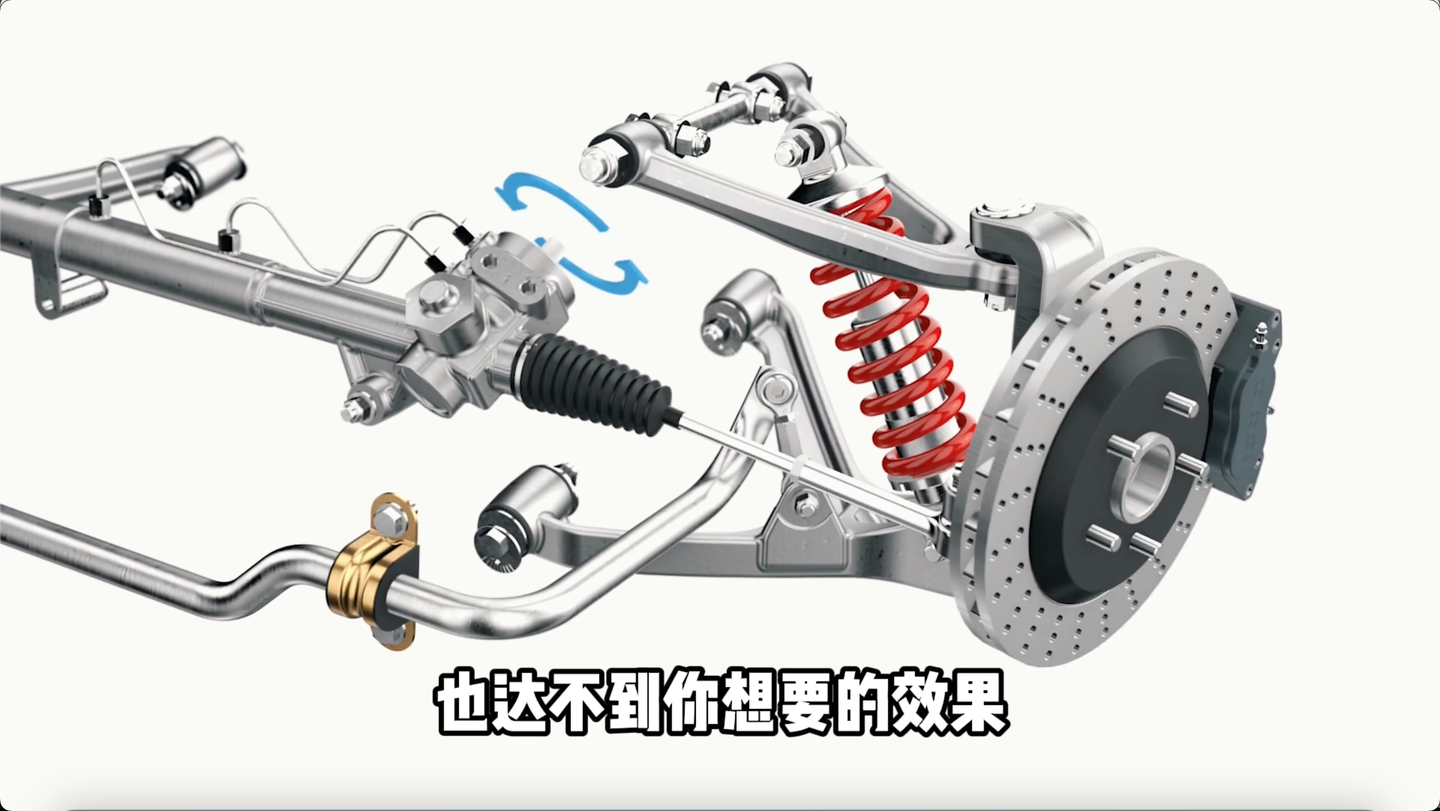
咱们汽车圈常用的谚语,叫做零部件体现整车下限,最终调校体现一辆车的上限。但在悬架和转向领域更多的是反过来看,零部件格局没到,调校再多也达不到想要的效果。理论测算再精密,也逃脱不了零部件格局受限。
五、转向中心感On center
另外有个技术名词这里可以记一下,叫做转向中心感On center feel。之前在皓影PHEV讲解中给大家分享过,简单来说你可以理解为一辆具有良好中心感的车,需要具备方向盘轻微偏转的回正能力,直线稳定性好的同时,中心感也要清晰,无响应区和超调量都要合理。
前面讲了,一辆车变道行驶时,从无响应区过渡到车主能感受到侧向加速度的过程要线性,转向手力也要适中,手力与变道响应之间递增关系比较好的车才叫好开。你可以试着在变道过程中,给车辆一个轻微加速或制动,如果一辆车不需要太多方向盘修正就能够维持原有的轨迹,出弯时方向盘还有不错的回正能力,就可以视为好开的车。
总结
本期老王带大家了解到了一些关于评价车辆操纵性的客观参数,比如什么叫转向灵敏度、灵敏度的线性度,什么是力矩梯度和手力反馈,还有转向中位感。
看完这些知识,很多人说了,我怎么能活学活用呢?其实之所以很多人觉得前面比较难理解是因为,咱们都是正着评价,一辆车到底怎么设计会更好,那如果需要在短时间评价一辆车,其实不妨利用逆向思维,把前面老王讲的定义反过来看,比如说下面这三个现象,如果出现了,基本上就可以对车辆操控性进行一票否决了。
第一,如果一辆车需要频繁较大幅度矫正方向盘才能维持变道这个过程,并且侧倾来临得很快,幅度又比较大,这说明横摆和侧倾响应有很大的超调量。这显然不是好开的车,很多改悬架没改好的越野车会出现类似情况。
第二,如果你发现方向盘的手力与转向响应不协调,在紧急避障时,该通过大角度转向时,速度起来了,但方向盘角速度跟不上,够不成线性关系。说白了就是你想变道的时候,感觉车子拖后腿不能帮你游刃有余地变道,这说明转向助力没有调好。
第三,如果转向助力拉垮的同时,后轴还有明显甩尾,让驾驶员感觉车辆迟钝、笨重和不安全,这可并不仅仅是转向系出了问题,说明这辆车很可能是悬架都没有调整好。

那么说到这里,一定有小伙伴提到,线控转向是不是今后的趋势,那么大家记得点赞关注,下一期我们讲一下现在 汽车行业的热词——线控转向。我是老王,下期见!