
理想Livis Day完整图文与视频
视频版:
https://www.zhihu.com/video/2050032269373485702图文版
李想
各位朋友,大家下午好,我是李想。欢迎来到 Livis Day 理想汽车软件与具身智能的发布会。
我想你们心里一定有一个问题,为什么要开这样的一场发布会?我们想借这个机会正式向大家发布我们在软件和具身智能方面的全面升级。当然还有另外一个问题,我知道大家更想听到答案。
李想又在聊具身智能,具身智能跟造车到底有什么关系。在我正式回答这些问题之前,我想先请大家看一看我们在车内交互和软件体验上,今天已经进化到了什么程度。有请我们的产品经理曹煜为大家带来全新一代的理想空间交互体验。
曹煜
大家好,我是曹煜,理想座舱的产品经理。今天我想和大家聊聊交互。在我们看来,交互从来不是屏幕上堆了多少界面,排了多少图形,做了多少动效。
交互是在这个空间里陪你度过每一天的那个人,每一次触摸、每一次唤醒、每一刻时光,这是我们对交互的理解。我想给大家看一张图,我想在座的很多人从来没有见过它。

这是十年前我们的 SEV,它从未真正走向市场,但它是我们一切交互的起点。从 SEV 到理想 ONE 的四屏体验。

再到 L9、L8、L7、L6 的 五屏空间。

再到今天全新一代 L9 Livis。

十年里车里多了越来越多的应用与服务技术,从网联化到智能化,再到今天更主动的智能。而我们一直在做一件事,在越来越多中找到越来越懂。
我们想创造一种平衡,它是克制的产品理解和直白的美学表达。克制是回到第一性原理,不加一个多余的东西。直白是不刻意渲染,不渲染,不管您是什么年龄,看一眼就懂,点一下就有,简单直接。
我们想要带给你的是松弛,是信任,是像你的朋友一样在你的身边的存在。很多人会问,我们这块屏幕为什么设计成这个样子?去掉了一条黑色的分割线,它看起来很简单,但背后没有那么容易。我们试过主流的 16 比 9,但是有点局,也试过中等的宽幅,但对副驾不太友好。试过更高一点的尺寸,但你的驾驶视线会被侵占。
最终我们就确定了这个全景宽幅尺寸。我们又试了无数种布局,如何在丰富的内容和稳定的驾驶之间找到平衡点,最终形成了现在的直观的体验。如果你问我什么是座舱应该有的样子,我的回答是你眼前的就是答案。
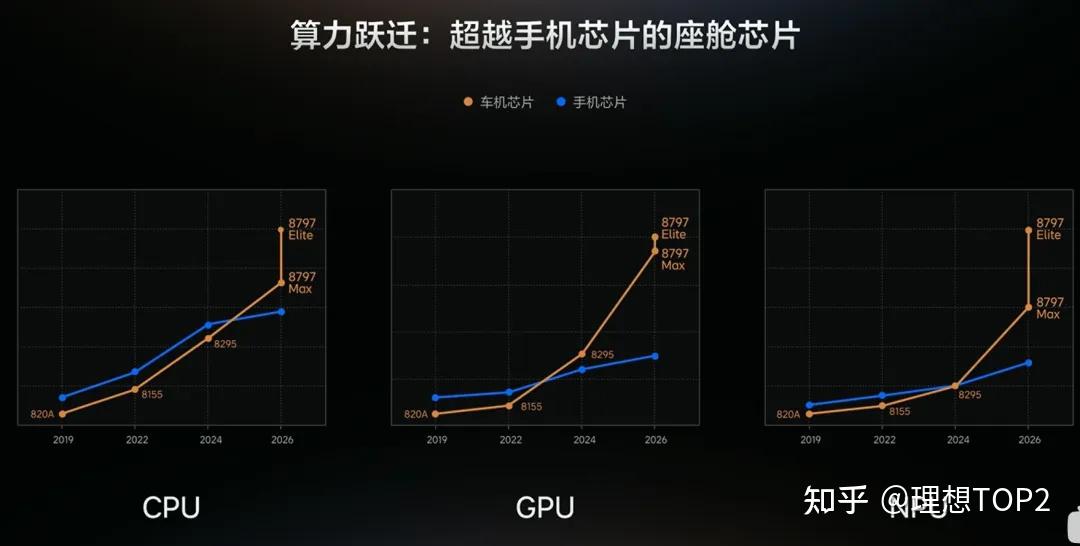
这十年里,不只是屏幕在变大,我们一直在和芯片,在和系统性能赛跑。在理想 ONE 的时代,车规芯片 820A 落后主流手机整整两年了。后来在 8155 和 8295 的时代,我们追平了手机的主流水平,流畅性大幅提升。
大家一定在小红书,在抖音上见过很多用户的花式测评,他们说这是车里的苹果。而今天在这里我想告诉大家一个事实,理想座舱硬件系统的性能已经超越了主流手机。

这一代我们使用的是全球首发的高通 8797 平台,8797 的 Elite 旗舰芯片,它有 550K 的 CPU 任务处理能力,8.1T 的 GPU 高精渲染,320 TOPS 的 NPU 端侧实时 AI 模型。
它不只是一个芯片,它是一代机皇,而且这是行业里第一个90赫兹高刷新率配合180赫兹触控采样率,再加上我们自研的底层系统,实现极致的触控响应。在如此大面积的触控屏上做高刷,其实难度远远超过您的手机和 Pad 这种小屏,为什么?
因为芯片背后连接了若干块屏幕,对带宽的要求极高。您的 iPhone 17 Air 它的带宽是 7G,而 L9 Livis 的前排显示带宽是 23.5G,信号链路也要长得多,从 SoC、MCU 多屏到各种外设,消费电子根本没法比。但最终的效果像热刀切黄油一样丝滑。我们来看一下。
怎么样,大家喜欢这种流畅丝滑的体验吗?我相信没有人能拒绝行业里第一个在全景屏上实现的 90 赫兹高刷体验。

接下来我还想聊聊软件交互。第一个关键词是更广阔。
当你打开地图的时候,35.5 厘米宽,20 厘米高,实现 16 寸的全景地图带给驾驶员前所未有的广阔视野。

EID 的环境感知也同样舒展,当你进入复杂的路况时,你不用再被局限在狭窄的空间里,这种宽阔带来的是什么?是安全感。而今天当你播放视频时,影院巨幕的感觉又会扑面而来。
那第二个关键词是细腻。我们重构了页面里的每一个细节。每一次页面的打开、每一个按钮的开闭、每个菜单的滑动、每一次控件的回弹都连贯流畅。还有实时动态渲染的高斯模糊。
还有一个我特别喜欢的细节,光的处理、光的质感,背景光会随着你的唤醒位置变化和氛围灯联动,这种感觉非常细腻。今天有在座的不少同学都是理想的车主,我想和大家说的是只卷参数、只堆配置,永远做不出一个充满人文关怀的座舱。而这些才是我们永远在为大家坚持深耕的事。
接下来我还想带大家看看在日常使用中的体验。为了能让大家有更真实的感觉,此刻就在现场我请我的两位产品同事思杰和振宇来给大家现场演示一下一个人和两个人分别怎么使用这块屏幕。
思杰,你准备好了吗?当驾驶员上车之后,首先看到的是非常熟悉的卡片。轻轻一滑,刚需信息触手可得,但显示面积更宽了。驾驶员的显示宽度是之前双连屏的 1.5 倍,但每个高频操作又尽在手边,车速显示、续航显示、车辆控制、媒体控制都在离你最近的位置。
更重要的是动态响应,它时刻在感知你的注意力。当今天你进入泊车的时候,EID 会自动放大,给你充分的环境感知信息。其他应用会自适应的缩小,所有应用都做了自适应,不需要你操作,根据场景理所应当自动响应。
而当今天你开在一个熟悉的路段,不需要桌面上那么多繁杂的信息,你可以三指轻轻一滑进入放空空间,在这里只会留下空旷的、跟随驾驶缓缓流动的光感,你最爱的歌词也尽在手边。
而当今天您的爱人坐上了副驾,我们又回到了那个为两个人设计的空间,它灵活且自由。首先副驾的娱乐信息和控制面板会自然的出现,行车时主驾会更宽一点,副驾稍微小一点。
但今天副驾想真正消费内容时,比方说看个视频的时候,又可以一键撑大,主副驾 1 比 1 分屏,两个人平权。停下车来,两个人想一块儿看的电影,主驾内容会消失,视频沉浸式的铺开,对宽画幅的院线电影非常友好,视频的显示宽度是之前双连屏的 1.7 倍。
那这个时候最适合开启前排零重力好好的放松一下。大家觉得我们的配合好吗?让我们把掌声送给思杰和振宇,谢谢他们。交互它不仅仅是更自然更灵活了。我们还相信全景屏的设计品味和质感本身就是内饰的一部分。

如您所见,如黑胶唱片一般的全景封面流,如星云环绕自在呼吸的放空桌面,如山野潮汐日出一般的小憩氛围,它们都会成为你生活的一部分。除了一个人和两个人,还有我们的每一天。
想跟大家分享一个数据。它代表着我们的用户在 78% 的旅程里都是有音乐陪伴的。所以在这一代我们打造了全新的 9.3.6 的音响系统,峰值功率达到了 5440 瓦。

它不仅仅是硬件强,还有最重要的是全新的声场设计。九组水平环绕声道,三个矩阵式的低音炮,六组天空环绕声道,前两排第三排每个座位都是演唱会包厢,还有我们行业首创的前排 5.2.2,后排 7.1.4 的双音区布局,前后排可以同时播放全景声。搭配全新自研的音效算法,让硬件的潜能完全释放出来,再加上我们的调音大师,声音质感达到前所未有的高度。同时我们系统级的支持了 96K 的高采样、录音棚级别的高品质音乐。你的 QQ 音乐、网易云音乐的高级会员不会白花钱。
今年下半年,我们和合作伙伴还会有更多关于声音质感上的升级,敬请期待。在这里我还想特别讲一个东西,就是我们的头枕音响,我们叫它 Livis Sound。
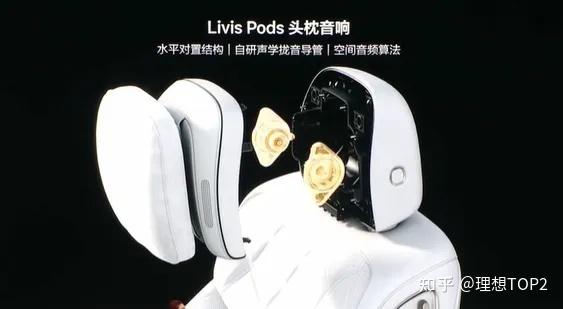
头枕音响不仅仅提供的是物理上的声音隔离,它提供了一个伴随在你身边的空间音频的质感。我们采用背靠背的扬声器设计,叠加自研的空间音频算法,声场更宽阔了,没有那种声音在脑后的压迫感,同时抵消了头枕震动。
搭配我们口碑极好的软枕,你可以舒服的把头靠上去,享受一个独立的音频空间。这是我们展厅必打卡的体验之一。你必须亲自坐在车里才能感受到我用语言描述不出的这种震撼,稍后大家一定要去好好体验一下。
除了声音外,还有你每天都会用的手机,把手边最熟悉的感觉带到车里来。这次我们支持了 CarPlay,而且是同级里最大最流畅的 CarPlay。

还充分融合了我们的车机硬件,我们的 HUD 上会联动显示地图、方向盘控制。而今天如果你是 Apple Music 用户,我强烈建议你用这种方式试一试。支持杜比全景声的空间音频,搭配我们的星环剧院音响,沉浸式的高保真的听音享受。不止 CarPlay,所有主流旗舰手机互联全都支持。
十年时间,理想始终坚持不用安卓公版应用,每一个应用的上限都经过系统级的适配,坚持不为了堆砌应用数量牺牲任何一代系统的超流畅体验,坚持照顾到车里的每一个人,照顾副驾让它具备了独立不妥协的娱乐体验,照顾二排让它具备了亲朋共享随时随心的美妙旅程。
还有我们创造出来的真正好用的第三排,让汽车从驾驶员的工具变成全家人出行空间。理想系统的设计从来不是为了一时一地的竞争,而是为了你和你的家人在未来每一段旅程里的品质体验。每一刻用心都希望你能感受得到,谢谢大家。
画外音
最好的视野。不是看到。更多复杂和闪烁的信息,而是让世界退后一点,安静一点,慢一点。于是你会看见走过的路。和更远的方向。也会看见转身的鸟群。被风拖曳的落叶,映在屏幕的夕阳。当科技融入生活。生活里,那些不动声色的生长的,重回视野。
李想
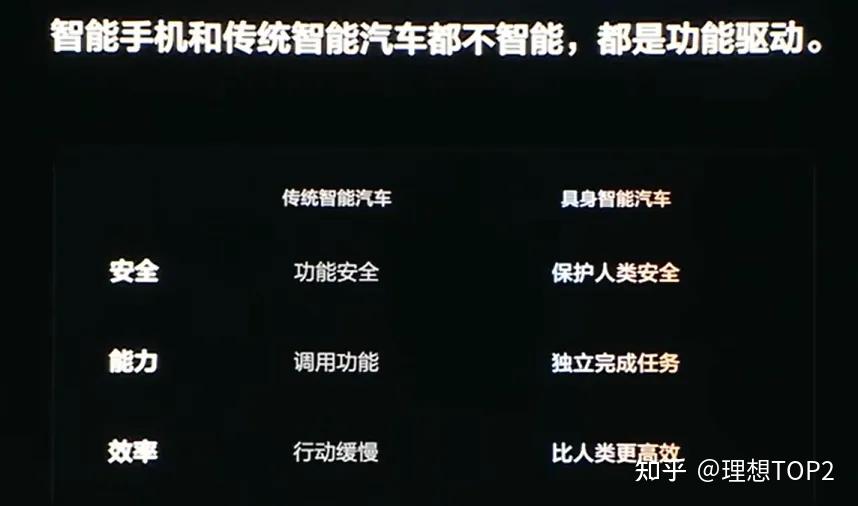
大家感觉怎么样?够智能吗?太假了,我觉得远远不够。今天我想分享一个我们的判断。我们认为今天的智能手机和智能汽车其实都不智能,以及我们为什么一定要坚持要做具身智能。
要想讲清楚这件事情,我们得先回到一个原点,就智能手机这个概念是什么时候提出来的?是 1992 年 IBM 提出的,而第一款我们认可的智能手机是 2007 年 iPhone 的发布。智能汽车已经是十几年前的2012 年,特斯拉发布了 Model S。那么到底什么是智能手机?
什么是智能汽车?行业公认的核心的定义,最重要的是三条。第一条是由软件来定义硬件。第二条必须能够联网且实时在线。第三系统可以持续的升级。
这是过去十几年大家普遍接受的规则。但今天我要说一个不太一样的判断,虽然名字上挂着智能,但今天的智能手机和智能汽车都不是真正的智能,它们本质上还是功能驱动的,而不是一个有生命力的智能体。
为什么这么说呢?我们拿智能汽车最重要的三个维度来看一看:安全、能力和效率。
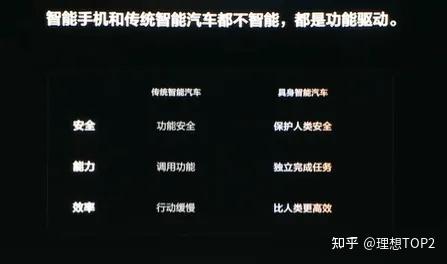
第一是安全,传统智能汽车对于安全的定义核心就是功能安全。大家有没有遇到这样的状况,我们的驾驶环境非常简单、容易的时候,智驾的表现特别好。但是一旦遇到特别复杂或者从来没有见过的场景,以及极端天气的时候,他会怎么做?他会直接退出,把方向盘丢给你。现场有没有朋友自己开车的时候遇到过这样的经历?谢谢。
在这件事上,从法规上讲完全合规,充分的满足了功能安全的要求。但是对于人类而言,恰恰是最不安全的。有接近一半的智驾事故都是发生在接管的一瞬间,驾驶员毫无防备就要去迎接即将发生的危险。而真正的具身智能在安全上必须改变逻辑和观念,必须以保护人为核心,这是一切设计的必要的改变和根源。
第二是能力。智能汽车的工作方式就是调用功能,调用各种应用的功能,调用车上的功能。我们所有的产品经理都是围绕着提供什么样的功能,服务于什么样的场景。我再拿智驾举一个例子。其实本质上今天所有的智驾从功能上讲只会向前开,向左转向右转。今天的智驾既掌握不了人在各种场景下的倒车的能力,也完全没有人类那样遇到危险以后靠边停车的技能。
我想问一问大家,你们都在用智驾,请问你们对自己的智驾的倒车能力,有一款车是满意的吗?没事儿,哪怕你是理想的车主,也大胆的面对这真实的问题。对,如果不满意就对了,因为进步的速度实在太慢了。十多年过去了,如果还是这样的能力,智能驾驶怎么可能在各种场合下独立去完成任务。而真正的具身智能要全面学习人类的技能,更重要的是必须能够独立去完成任务。
第三个是效率,我这里还是拿智驾来举例子,我不是想问大家在什么场景下使用智驾,我想问一问大家最普遍的在什么样的场景下不使用智驾。赶时间,要迟到了。窄的道路。对,无论是我自己还是身边的朋友,有急事的时候,赶时间的时候,在类似胡同这样的复杂场景的时候,都不会使用智能驾驶。
原因很简单,智驾的效率和反应速度都远远低于我们自己开车。而真正的具身智能,必须要做到比人类的效率更高。保护人的安全,独立完成任务,比人效率更高。我想这是所有人真正想要的智能。
这就是我们认为传统智能汽车和具身智能汽车根本的差别。要从设计的目的和源头上就要发生改变。我认为这样的判断同样适用于通用的人形机器人,也适用于以后可能会出现的任何的具身智能的产品。所以回到最开始那个问题,具身智能跟造车到底有什么关系?关系太大了,我们一定要用具身智能来给你造一辆能够保护人类安全,独立完成任务,比人类更高效的具身智能汽车。
这三个关键要素的升维是行业巨大的挑战,它比从大语言模型到今天我们使用的 Agent 要难得多,所以光靠修修补补是不够的,我们必须重构整个系统。怎么围绕具身智能来定义模型所需要具备的能力?芯片和安全系统应该如何设计?围绕具身智能应该如何定义产品和体验?接下来我们就从三个维度给大家汇报理想汽车的答案。首先能力的主角是模型,也是具身智能的大脑。我们有请我们基座模型的负责人詹锟。
詹锟
大家好,我是詹锟。一直以来我们都在用大脑小脑粗暴的拆解了决策和执行,用快慢思考切割了常规场景和复杂场景。但是人脑从来不是从单一的中枢统筹管理,而是依赖四个独立的分区并行运行,各司其职,缺一不可。
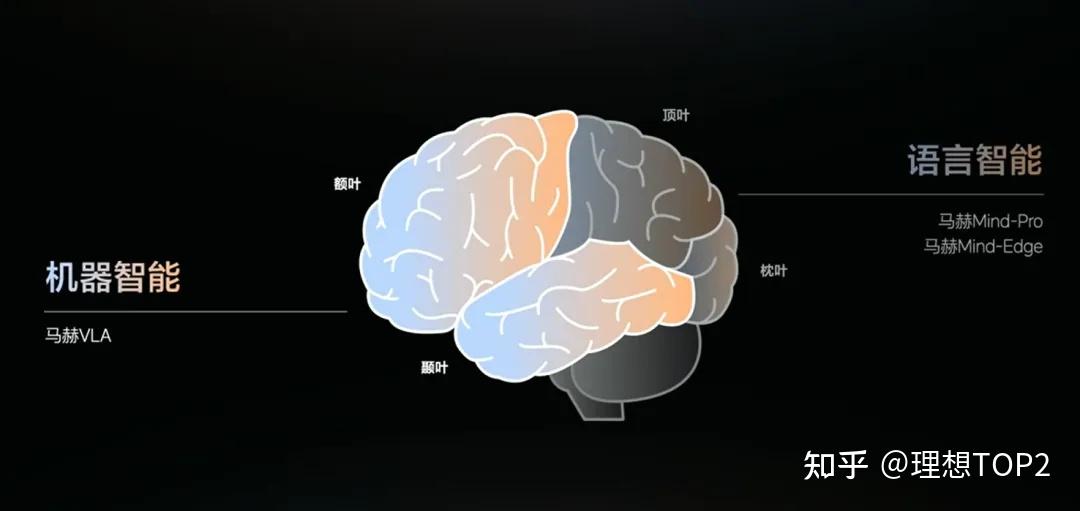
枕叶和顶叶承载着语言逻辑思考,听懂指令,推演行动方案,这个叫语言智能。颞叶和额叶承载着三维视觉感知和躯体的动作控制,它能看清物理世界,精准执行操作,这个叫机器智能。
另外,画面中还有一个没有呈现的岛叶,大家能猜出它是管什么的吗?它是主管恐惧和情绪。那为什么我们没有在这个图上显示出来呢?因为我们希望智能不能出现这样的情绪。
分开来看,语言智能、机器智能分别独立使用都是毫无意义的。只有把两者彻底的焊死融合,才能形成完整可用的具身智能大脑。
好,我们来先说说语言智能。大家一定熟悉我们的理想同学的MindGPT,它只是我们一个热身试水。经过多轮的底层的重构迭代,我们淘汰了之前的模型,进化出两个能力猛兽:马赫 Mind Pro 和马赫 Mind Edge。
首先跟大家介绍一下我们的马赫 Mind Pro,马赫 Mind Pro 在通用基准能力方面,在 IFEval 指令跟随、LongBench v2 超长文本理解、GSM8K 高阶数学推理、BFCL v4 工具调用这些行业公认的评测最苛刻、零水分的权威基准里面,我们的马赫MindPro 稳居行业第一梯队。

放在 Agent 的专项领域,CLIP 系列的榜单,PinchBench v2 的实景测试,我们的综合性能超越了大多数的主流 Agent 模型。但实验室的跑分终究只是纸面数据,没有任何的实战价值。
我们的真正的优势是将真实的场景落地的碾压级表现。依托 Livis Agent 全场景的体系的能力,我们覆盖了车辆控制、智慧出行、办公、问答、娱乐等等全部的车载场景。
我们从 Token 的生成速度、任务的完成质量,Token 的使用成本,端到端的响应时延这四大商业核心的维度实现了全面领先。这是真正可量化、可落地、高性价比的实战型智能体模型。
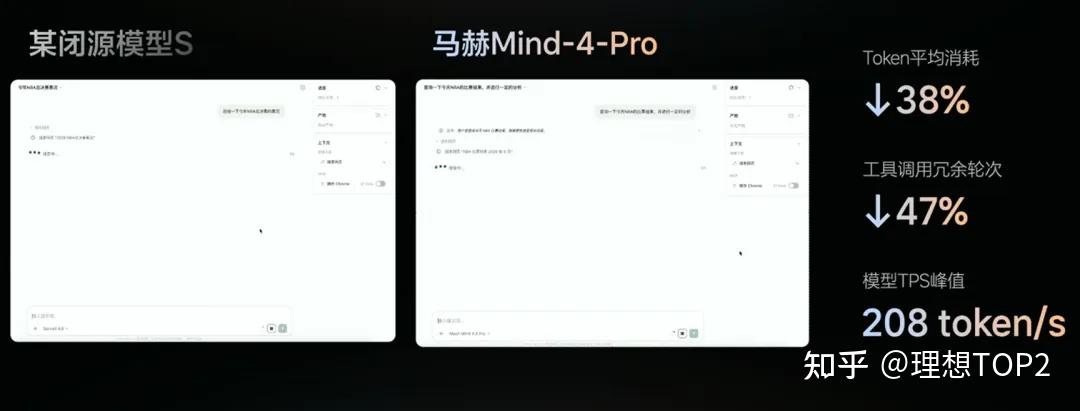
在效率和成本方面,我们的马赫 Mind Pro 完成了跨越式的突破。我们采用了 Token 压缩技术,在任务完成率零衰减的前提下,整体的 Token 平均消耗降低 38%,工具调用的冗余轮次直接降低了 47%。
这套优化同步通过了标准的基准测试和 Livis 的业务实践的双重考验,模型的 TPS 峰值更是高达 208 Token 每秒,推理效率是主流 Agent 模型的两倍以上,打破了行业高性能必然高成本的悖论。

欢迎大家后续在体验区体验我们的模型。马赫 Mind Pro 强到离谱的性能是原生 Agent 的智能体模型的能力,目前已经全面落地赋能 L9 Livis 的车载智能。
首先我们为了提升模型 Agent 的能力,我们搭建了数百套真实的业务沙箱环境,高精度的模拟了工具调用环境,让模型在 Agent 环境中不断锤炼。
我们的核心突破来源于独创的混合I/O训练体系,我们搭建了三套差异化的训练环境,进行了并行的混合训练,全方位的覆盖了不同难度、不同场景 Agent 的决策需求。
包含关键的单步强化学习,长链路的多步强化学习以及在线环境的强化学习。通过精细化的数据配比,彻底解决复杂场景决策不准、落地适配性差的行业难题。
针对性的强化了 Livis Agent 环境下的通用能力、业务专项能力、工具调用精准性,同时大幅优化了工具调用的 Token 使用效率。这是一套全方位、多层次的专属 Agent 的训练体系,让我们在模型的各类全维度榜单评测中稳稳拿下了顶尖成绩,实现全方位的领跑。
好,接下来我再给大家介绍一个我们的新模型,马赫 Mind Edge,它是一个端侧的智能体模型。让我们先看一段视频。
画外音
Hi Livis, sorry, 我的耳机找不到了,你能帮我找一下吗?
好的,我找一下。你的耳机在扶手箱上。
詹锟
就像视频里的这样,马赫 Mind Edge 就像一个实时在车里的私人助理,帮你照看你的家人。
我们采用了多模态流式的持续建模,让模型能够连续的理解动态的物理世界,同时具备因果推理和自主决策的能力。在此基础上我们做了大量的车载的专用的行为策划训练,让模型彻底摆脱传统 AI 只回答不行动的模式。
它可以输出动作,实时调用车辆的硬件,always on 的全天候主动感知,人车交互、自主控车,多模态的问答全部都在车端的本地实现,低时延高可靠,而且数据完全不上传。最关键的是这不是云端模型的阉割版本,而是从底层就为车载场景原生打造的模型,它是行业领先的端侧原生智能体模型。
接下来让我谈谈真正让我睡不着觉的这一部分 —— 机器智能。前段时间不少从美国回来的朋友给我和李想都发了一模一样的消息:除了特斯拉国内没有智驾第一梯队。上个月我也亲自杀到了硅谷,把最新的 FSD V14.3 连着开了整整两个星期。
回国之后我脑子里只剩了两句话,第一特斯拉真的太强大了。第二压力也真的太大了。第一个是我们可以公开对外说的。第二个我回国以后紧急召集了核心算法团队拉通复盘。但是我就热爱这种压力。真正感受到压力才证明我们是在平视这个星球上最强大的对手,而不是在国内的内卷中自我麻痹。只有真正把目标对准最高的那个人才有机会超越特斯拉。

接下来我来说明一下我们关于机器智能的完整升级路线。今年 5 月全新的 L9 正式发布,理想全面迈入了马赫 VOA 时代。

我们给用户直观的感知有三点,更安全、更高效、更强大。这不是零散的功能补丁,是整车智驾全栈架构的彻底重构。
先说安全。有人能猜一下屏幕上这个数字是什么意思吗?这也太难了,这是截止到昨天 6 月 14 号,理想全系智能驾驶主动避险的总次数 1727 万次。其中重大避险 5.5 万次。1727 从来不是一个冰冷的后台日志,是 1727 万次的平安回家。

从 2022年至今 1400 余天,我们平均主动避险每日 1.2 万次。直白来说,用户出行每遇到 100 次道路险情,就有一次会直接酿造成车祸,我们硬生生的把灾祸从命运边缘拉了回来,其中重大避险全部都是毫秒之差就会车毁人亡的生死瞬间。

2022 年至今,我们所有的迭代都在做一个事情,一步一步拼命的拓宽人类行驶的安全边界。2022 年激光雷达首次落地主动安全,2023 年 AEB 完成了全速度段的覆盖,2024 年行业首发了 AES,同时实现了 360 度的低速全方位的防御。到了 2025 年,AES 进一步升级,支持多车的连续避让和防御躲避碰撞。2026 年我们新增了悬空障碍物的识别,夜间的刹停上限更是提升到了 130 公里每小时。这每一次的迭代都不是参数的内卷,是拓宽人类生命的保护边界。请看 AEB 和 AES 的混剪视频。
在通过收费站的时候,突然出现的工作人员一定会把大家吓一跳。AEB 帮我们紧急刹停了。高速上前车的突然切入,然后紧急刹车。这个不是测试场,是每天都会遇到的真实场景。
在国道上突然横穿了违章的行人。在黑夜里,高速公路上一个货车静止的侧翻在地上,只留了一束光束。在城市道路的盲区,一个横穿出来的 VRU 骑行人,如果没有我们的 AEB,后果可想而知。在漆黑的道路上,一个事故车后面还有三四个乘客,这样的紧急避险一定心惊肉跳。在城市的施工道路上,面对异形围栏,我们依然可以守护大家安全。高速的夜晚突然出现的异形洒落物,我们的 AEB、AES 迅速生效,帮大家躲避威胁,大家觉得怎么样?
第二我们来讲讲更高效。接下来我想再问各位一个问题,大家认为普通人从发现危险到踩刹车的平均反应时间大概是多少?

2 秒有点太长了。根据权威的论文显示,普通人平均的反应耗时是在 0.45 秒。如果你在查看导航正在回复消息,你的反应速度更是达到了秒级,这是人类无法克服的生理短板。而地表最强的 F1 车手,他的极限反应耗时是 0.25 秒。我们全新一代马赫VLA系统反应耗时是 0.28 秒,无限逼近了人类的生理极限。

而多出来的这 0.17 秒,相当于你在 120 公里行驶过程下,能提前 6 米的完成刹停。
6 米是一台幻影劳斯莱斯的整车长度,而 6 米就是刹停到相撞,生存到毁灭的全部距离。我们从来不是在和同行比纸面参数,我们是在和人类的生理短板和流逝的时间抢夺生存空间,这就是属于我们的工程执着。
请大家来看下一个视频。这是一个我们标准的鬼探头测试场景。下面是我们的 L9 Livis,大家可以看到全新的 L9 Livis 更早的发现了障碍物,更早的做出了反应,给鬼探头的行人留足了更多的空间。同时随着全主动悬架的加持,我们的姿态也更优雅。

我们来看一下这背后实现的技术原理。这是一次从光子到车轮的全链路的深度重构。视觉输入时延直接降低了 47%,图像从曝光一开始就瞬间被处理,模型推理链路缩短了 43%。
我们可以以更高的频率理解这个世界,然后瞬间决策。线控底盘的响应降低了 38%,所有的决策被更快更准的变成了车身的姿态。操作系统的调度编排时延降低了 28%,全栈自研的 OS 让关键任务像火箭一样精准执行。
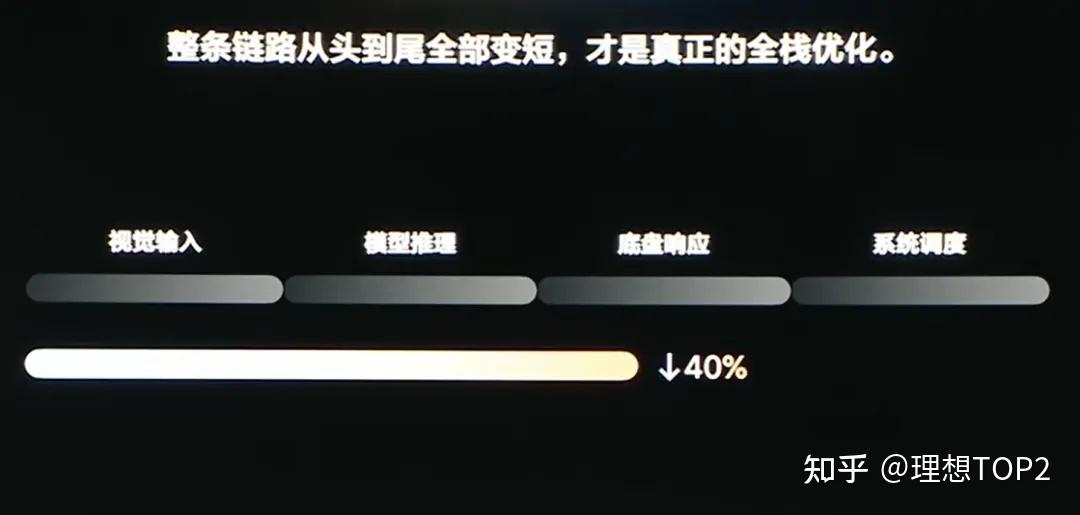
总体的端到端时延降低了 40%。这个不是哪个模块变快了,而是整个链路从头到尾都变短了,这才是真正的全栈优化。
最后我们来说说第三点更强大。先说几个真实的不能再真实的事儿。大家想想今天的智能驾驶,有几辆车会真正的倒车,能不能像人一样随时的自主倒车,腾挪通行礼让。再想想有几辆车会真正的靠边停车,不是停在规定区域,而是根据路况找到合适的位置自然靠边,像老司机一样停下。
传统智驾的世界就是这样,有些东西写在了规则表里,有些压根不在。挖掘机的爪臂什么时候该收,它看不出。穿黄马甲的保安打的手势是走还是停,他也不懂。传统的智能车只能完成有限的特定任务,而具身智能要做的就是学会人类真正的能力,而且要比绝大多数人做的更好。
我们来看一组视频。这是一个标准的施工区域场景,地面的车道线并不清晰,在这样的施工区注意一下前方布满了锥桶和水马。我们的 L9 Livis 在这样的施工区域内左右腾挪,它没有简单的停下,而是连续的不断的寻找可行空间,最终持续完成了绕行。
这个场景非常有意思,当发现前方出现了一个卡车,而且卡车开走后,我们看到了一个挖掘机的爪臂,它伸出来的时候,我们从容优雅的进行了减速,当爪臂收起,我们迅速通行,它是真正理解了这个场景。
下面这个场景也非常好。当我们左转的时候,突然遇到了一个对向的来车,当前的空间并不充足,我们并没有简单的卡死等待,而是迅速切换了倒挡礼让,等对方通行以后,我们迅速切回前进挡快速通行。
这个场景很有意思,前方不是一个标准的交通标识,而是一个穿了黄马甲的保安,他在用手势指挥着车辆,车辆看到停止手势的时候,迅速进行了减速,指挥前方车辆行驶后,他的手势变成前进,我们迅速理解快速通行,它是真正理解了人的手势。
还有一类场景相信大家也见过,在园区行驶时常见的就是这种异形低矮的和地面混为一体的物体。传统感知很难识别,而我们的 VOA 模型理解了这类环境,也了解这类物体,做出了合理的绕行动作。
下面我们再来看一个长视频,这是广州傍晚的雨夜,城中村的小路,路宽不到 3 米,没有车道线,也没有任何的交通标识。路边有打伞的行人,随时乱穿的外卖骑手,还有占道摆摊的小贩,这种路很多广州的老司机开起来都头皮发麻。而马赫 VOA 开得极其从容,它没有刹停也没有硬挤,而是根据对向来车、行人、电动车的位置主动的辗转腾挪,给每一个参与者都留足了空间。大家觉得这个表现还可以吗?
这些能力到底从哪里来的?答案其实有三个核心的变量。

第一算力,马赫 M100 车端算力直接干到了 2560 TOPS,行业顶尖。
第二数据规模,我们模仿学习的数据规模再次提升 50%,强化学习的数据量更是暴增了 15 倍。
第三,模型规模,模型彻底统一,参数量提升了十倍,同时每秒的 Token 计算量也提升了 15 倍。这不是单纯的堆算力堆参数,而是数据、算力、模型规模同时暴增下 Scaling Law 带来的真正的能力涌现。所有的能力都来自于我们这次整体的架构升级。
大家有没有见过这样一个场景,一个智能车,它的感知没有问题,识别没问题,但是决策却很离谱。
前方明明能走,他却卡在那儿。前方明明该刹车,才开始加速,感知和决策对不上,这是传统的模块化的模型结构的致命缺陷,感知、预测、规划三个模块各玩各的。就像一家公司,市场部说这事能干,研发说我压根没收到消息,财务说我还不知道有这个项目,功能都没错,但整体意图完全不一致。

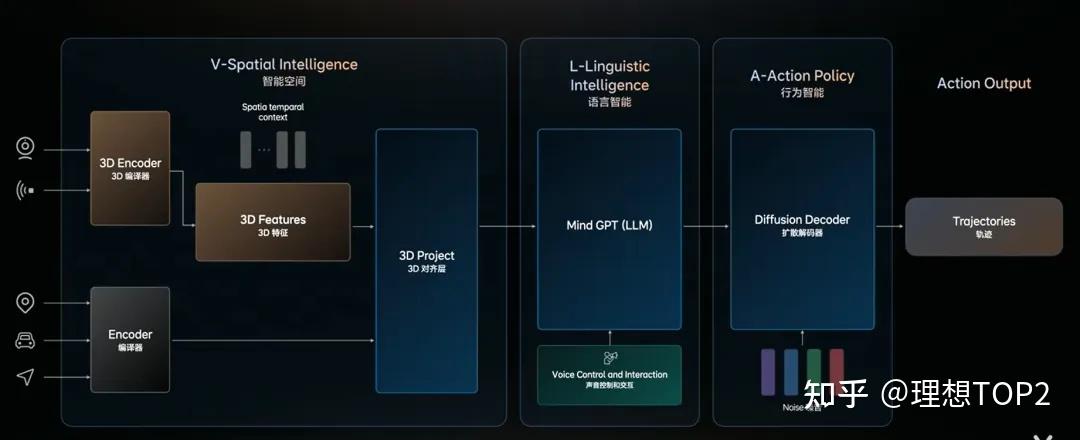
这一代我们直接把所有模块统一成了一个原生多模态的 MoE 大模型。不是先看见再思考再执行,而是让看见、理解、思考、行动从一开始就在同一个框架里彻底对齐。
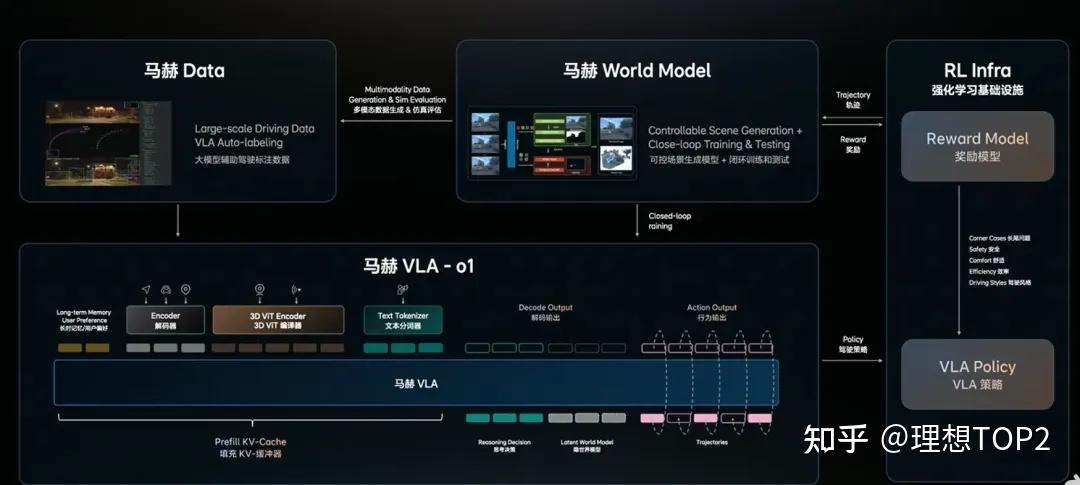
从马赫 VLA 到马赫 World Model,再到 RL Infra,三位一体整体架构彻底重构。而且我们从第一天起就是为了具身智能而生。
说到视觉能力,现在全行业都在疯狂卷一个激光雷达的线数,128 线、256 线、512 线,越卷越离谱。
但我想问一个很现实的问题,激光雷达的线数再高,它能告诉你红绿灯现在是什么颜色吗?
它能读懂路牌上前方施工禁止通行的几个字吗?
它能看懂穿黄马甲的保安手势是让你停还是让你走吗?
都不可能,激光雷达只能理解世界的几何轮廓,它只能告诉你这有东西,它根本不能理解这个世界。我们全新的 3D ViT 直接让系统从看见到看懂。

好,让我们把镜头切换到现场画面,现场观众朋友把手举起来给 Livis 打个招呼。这是 Livis 眼中的世界。
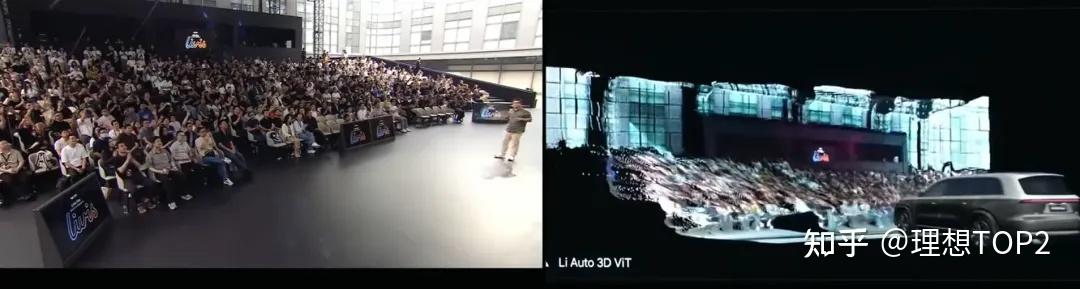
它不是一个简单的 2D 平面,而是瞬间重建了整个三维世界。它瞬间将观众的各种姿态、位置全部记录下来,同时能看到整个场馆,包括后面的文字。有了它,我们的机器智能第一次真正理解了世界,有了它我们才真正拥有了大脑的前额叶。
最后我们来说一下训练范式的同步升级。大家可以这么理解,学开车其实有两种学习方式。第一,坐在副驾驶看老司机开 1 万公里,你可能还不会开,但这叫模仿学习。第二种,你自己上路走错了,教练立马告诉你不对,你调整,再错再反馈,这叫强化学习。
光靠模仿,你只能学到大概是这么开的,只有真实的错误砸在你脸上,你才能真正学会这样开是对的。

这一代我们把强化学习数据规模直接拉伸了 15 倍,强化学习的训练算力增长了五倍。
从被动的看世界变成在真实世界中反馈,狠狠的练出了真本事。下半年我们的马赫 VLA 能力会持续进化,但有两件最重要的事情。第三季度我们会为 Orin 和 Thor 平台的老车主推送全新的马赫 VLA 裁剪版模型。
第二,第四季度理想智能驾驶模型对齐 FSD V14,这是我们对自己的要求,更是我们对用户的承诺。
语言智能即机器智能,这是具身智能的大脑。但具身的大脑需要稳定的跑在端侧有一个前提,需要一个专属的 AI 芯片。接下来让我们进入芯片的部分,掌声有请谢炎。
谢炎
大家好,我是谢炎。今天我要跟大家聊一个问题,一个困扰整个计算机行业将近 20 年的问题。然后我要向你们展示我们的答案,这个答案叫做马赫M100。
我首先带你们回到过去,回到上世纪八九十年代,那是一个让所有计算机工程师魂牵梦萦的时代。
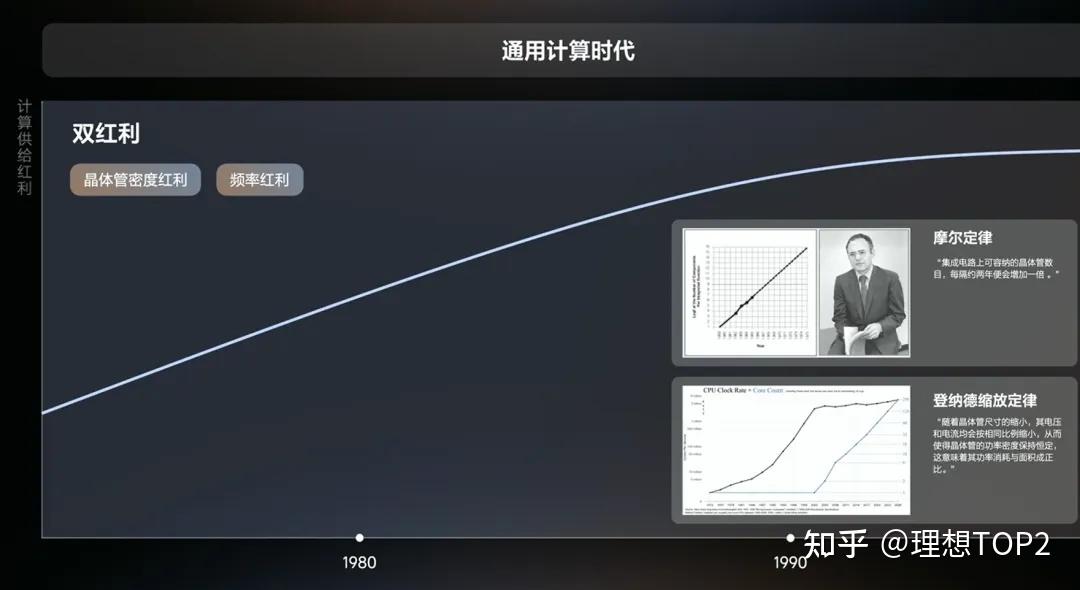
那个时代,计算机业享受着一种近乎奇迹的礼物。这个礼物包括两条规律,一条规律叫摩尔定律,每隔两年晶体管数量翻番,性能也随之提升,这是密度红利。还有一条规律叫登纳德缩放定律,尽管尺寸缩小,但电压、电流同步下降,功耗不增反减。
于是主频从 100 兆赫兹涨到 500 兆赫兹,又从 1G 赫兹涨到 2G 赫兹,全程很轻松。这是频率红利,双重红利叠加意味着什么?意味着一个程序员写完代码一行都不用改,等两年性能自动翻倍。这是人类科技史上从未有过的奢侈。
然后这一切结束了。2004 年前后,当晶体管继续缩小到 65 纳米节点,可怕的事情发生,芯片的晶体管开始漏电,电压无法继续下降,热量开始爆发,有人真的测试过芯片热到可以煎鸡蛋。登纳德缩放定律失效,频率红利消失了。
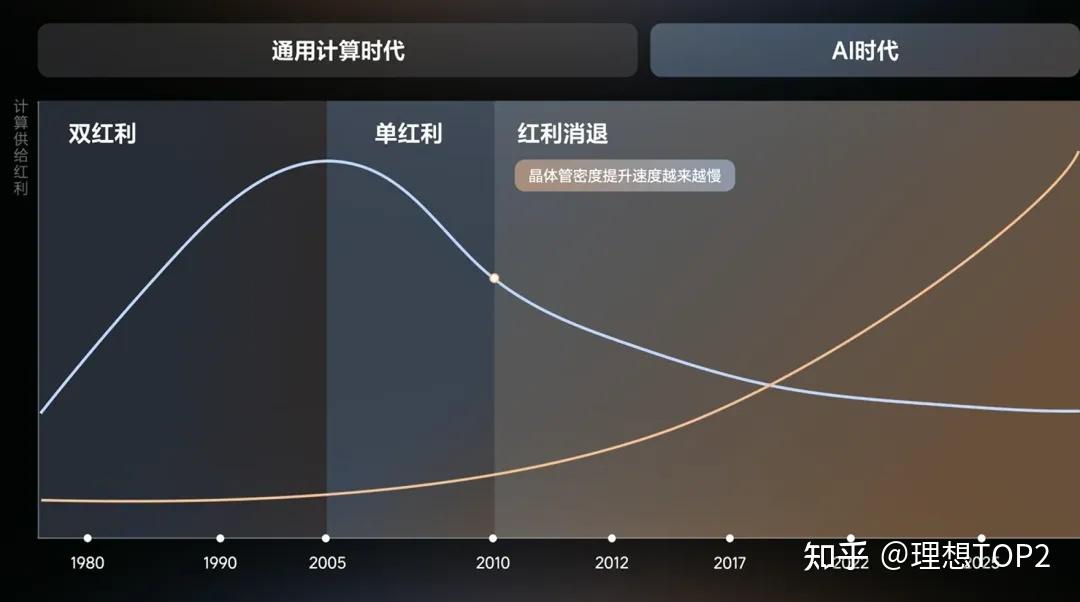
2010 年之后,就连摩尔定律也开始走向疲软,每一代的制程带来的性能提升从以往的翻倍变成 30%、20%、10%。曾经驱动计算机行业的两条腿一条断了,另外一条也开始瘸了。
而与此同时 AI 出现了,2012 年 AlexNet 点燃了深度学习的革命。2022 年 ChatGPT 让全世界意识到 AI 的边界在哪里,它没有边界。
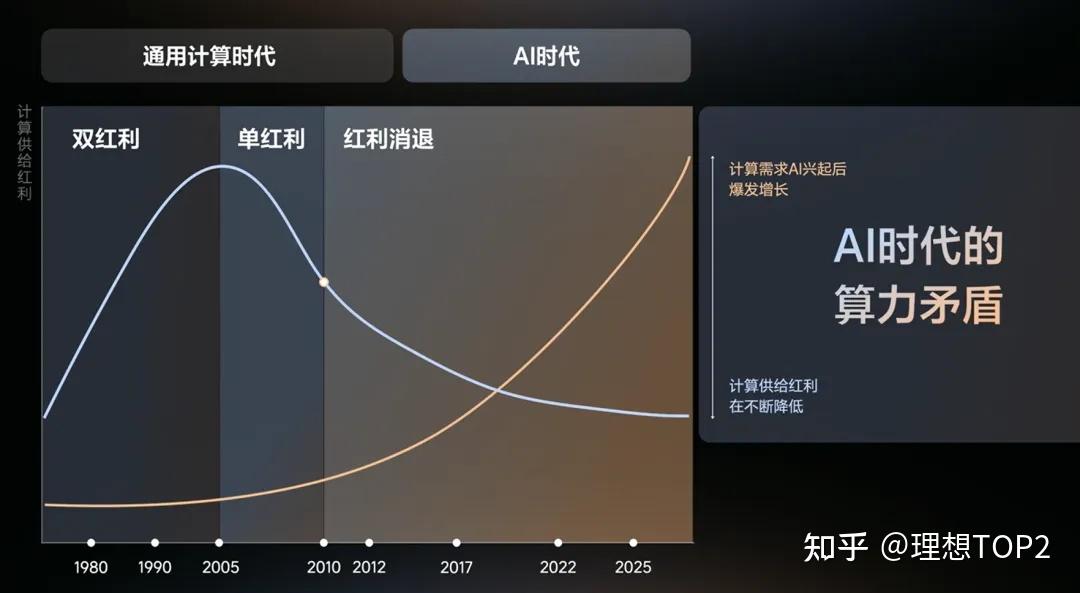
2025 年 Agent 的时代爆发,推理算力需求开始增长,已经完全超出了任何人最疯狂的预测。所以我们面对的现实是什么?算力的供给在放缓,算力的需求在增长。这个矛盾是整个行业的矛盾,也是我们必须回答的问题。
所以在 2022 年我们启动芯片设计的时候,我们就在思考一个问题,当砖头的质量和数量都无法大幅提升时,我们能不能重新发明盖楼的方式?答案是可以。
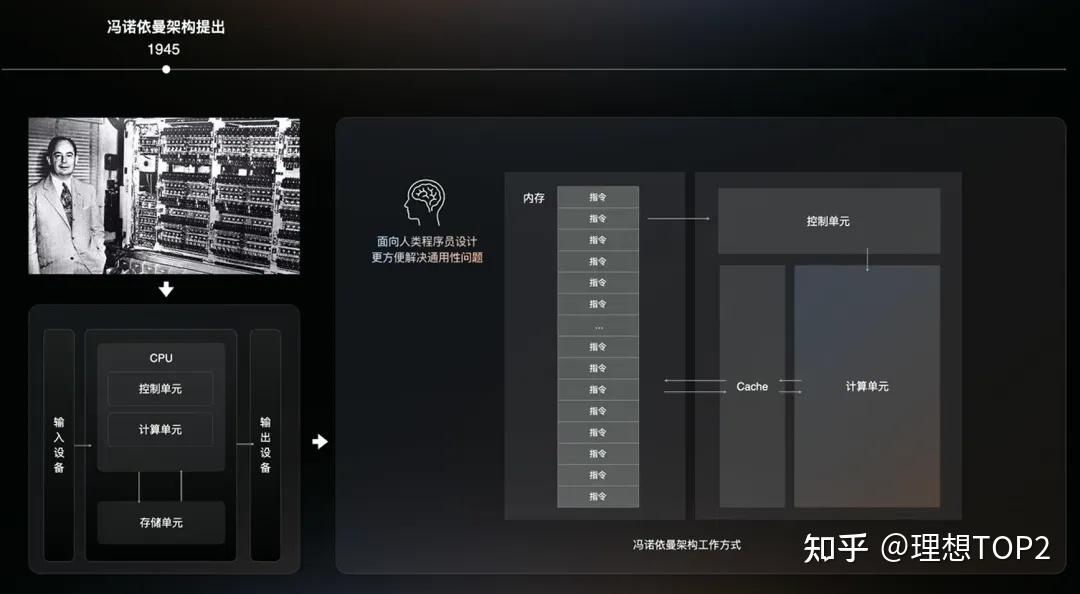
1945 年冯・诺依曼提出了一套架构,控制器、运算器、存储器、输入输出。
计算被抽象成一条顺序执行的指令,一条指令完成再执行下一条。这套架构为什么成功?因为它极其符合人类大脑的推理思维习惯,一步一步清晰可循。
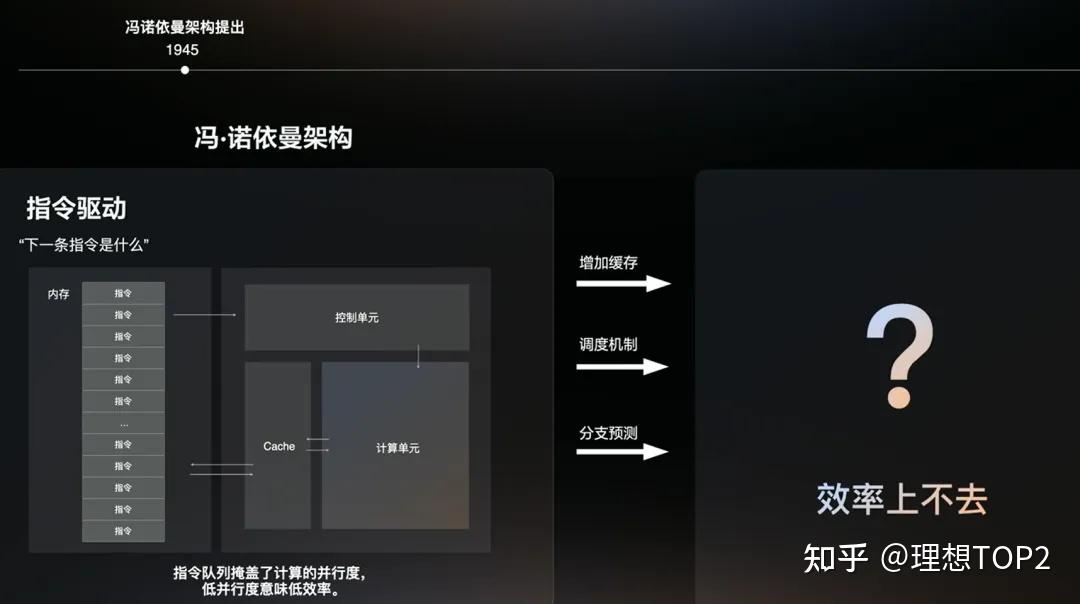
它统治了计算机行业整整 70 年,但它有一个根本性的代价,指令队列掩盖了计算本有的并行度,低的并行度意味着低效率。
为了弥补架构的局限,冯・诺依曼架构需要使用海量的晶体管来做执行计算以外的管理开销。所以我们引入了缓存调度机制、分支预测等等等等。当我们遇到 AI 计算这种海量规模的计算的时候,这些开销也会同步增长,所以效率永远上不去。
我们的结论是我们不能只造比过去更快的芯片,而是必须造一种完全不同的芯片。

我们发现 AI 的计算天然是并行的,数据是张量的,关系是确定的,数据流动路径是清晰的。
这是一张数据流图,这是一张数据依赖图,不是一条指令队列。
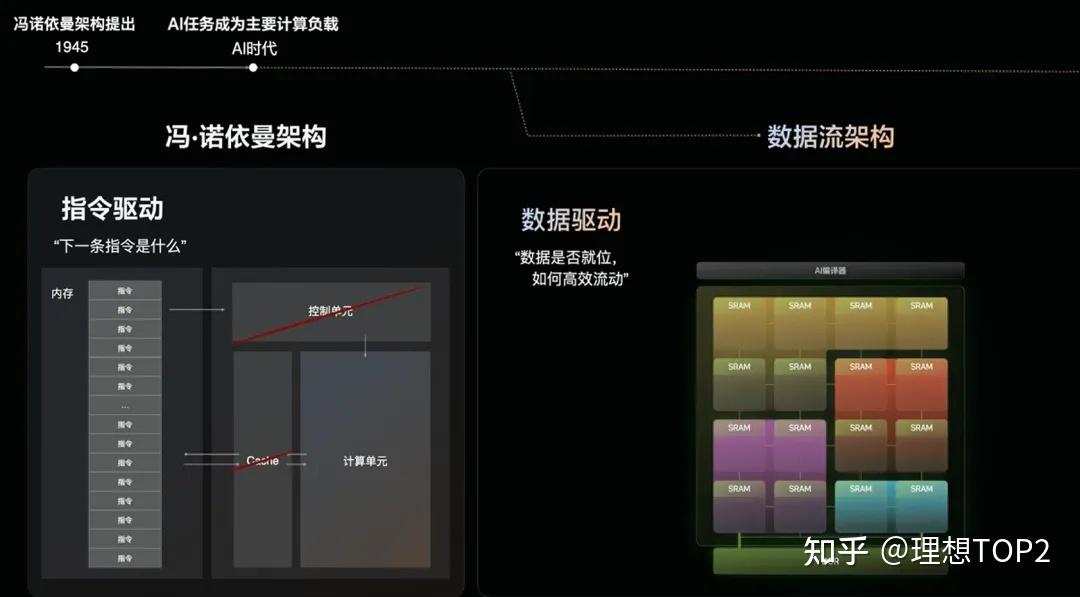
所以我们想到我们可以拆掉中央式的指令队列和伴随其左右大量的管理开销,让数据的流动来驱动计算的发生,让架构本身围绕 AI 的计算特性来原生设计,这就是数据流架构,这就是 AI 时代盖楼新的方式。

今天我非常自豪的向你们介绍马赫 M100。这是全球首款数据流 AI 芯片,它不只是一颗更快的芯片,它是用完全不同的思路造出来一栋完全不同的房子。
冯・诺依曼架构用 70 年推动了通用计算的辉煌。今天我们以马赫 M100 为起点,希望用数据流架构接过历史这一棒,继续推动 AI 计算再辉煌 70 年。
接下来我会给大家介绍这颗芯片有多强。马赫 M100 采用 5 纳米的车规级工艺的单芯片,算力 1280 TOPS,这是目前全世界量产最强大的车规级算力芯片。

但算力只是一个数字,真正重要的是效率。因为数据流架构的设计,马赫 M100 的实际运行效率超过 82%,而主流基于 SIMT 架构的 GPGPU 做到这个数字是非常困难的。
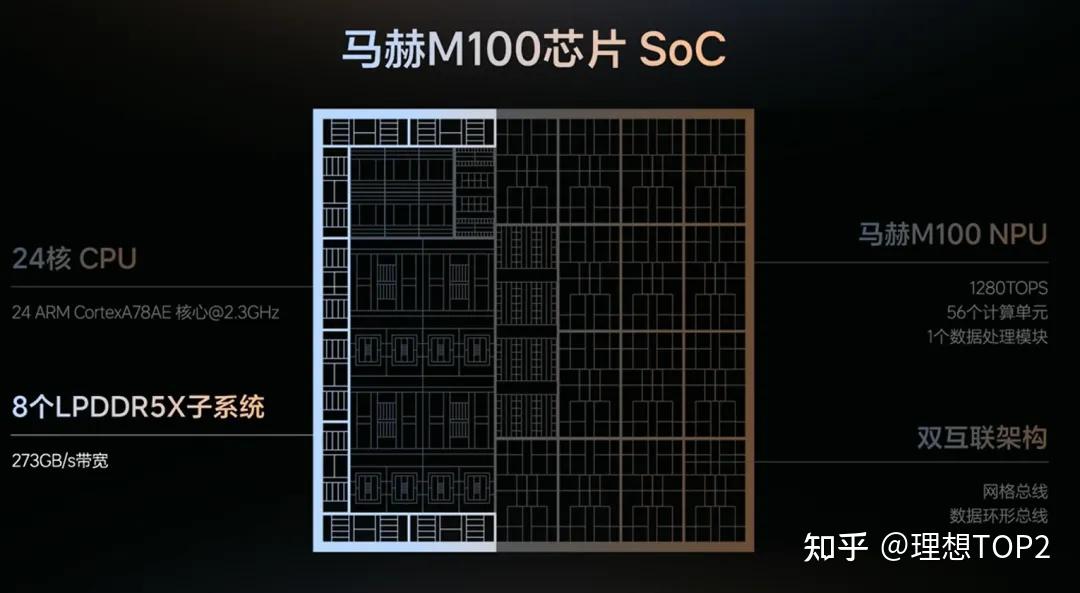
让我带你们深入看一下这个芯片的内部。我们把超过一半的芯片面积给了神经网络处理器,1280 TOPS 全在这里。它有 56 个计算单元和一个数据处理模块构成,采用网格总线加数据环形总线双互联架构。网格总线支持高带宽的点对点通路,数据环形总线提供确定性的广播通路。
这样数据在这个阵列里流动,数据流到哪里就在哪里触发计算,这就是数据流,数据即计算。CPU 部分由 24 核 Arm A78AE 构成,主频 2.3G 赫兹,这是车载旗舰级的大核,负责安全和系统控制。此外还有 8 路 LPDDR5X 子系统,273GB 每秒的超高带宽,提供片外大容量内存的高速通道。

我们拿它和全球公认智驾领域最主流的芯片英伟达Thor直接对比,基于 UniAD 的骨干网络和理想马赫 VLA 核心模型,每一个测试马赫 M100 全部超越,而且不是略微领先,是数倍的性能差距。
有人可能会问,这个芯片专为智能驾驶设计,跑别的行不行?
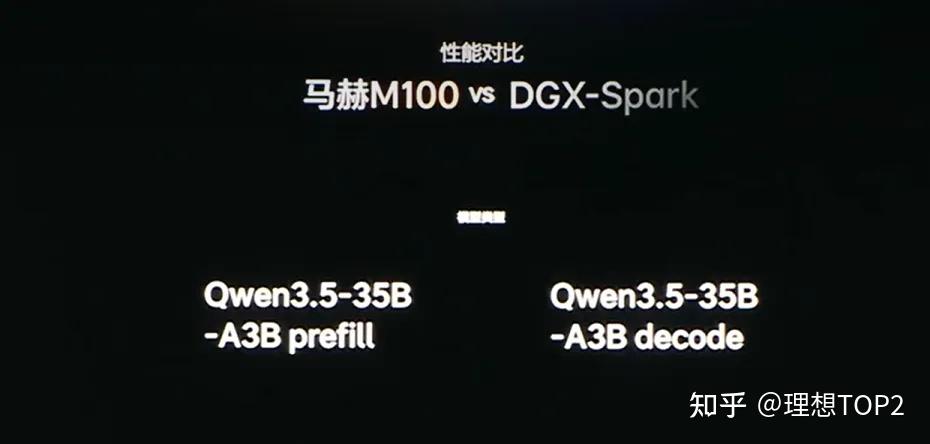
我们在马赫 M100 上部署了Qwen3.5-35B 参数的通用大模型,然后拿它和一台桌面超算做对比。

NVIDIA 的 DGX Spark 售价 4 万元,结果是 Prefill 的速度马赫 M100 是 DGX Spark 的 2.7 倍,Decode 的速度马赫 M100 是 DGX Spark 的 1.5 倍。这是一个装在车里的芯片,比 1 台 4 万块的桌面超算跑得更快。

还有一个好消息和大家分享,今年马赫 M100 架构的论文被 ISCA 2026 收录,这是国际计算机体系结构最具影响力的顶级会议。
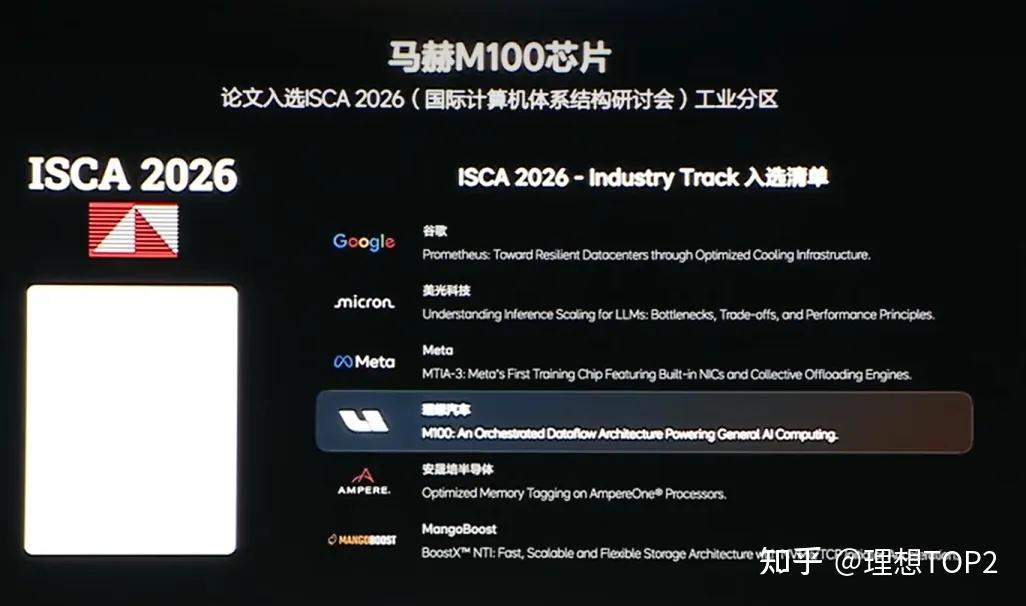
与我们同期入选的是谷歌、美光、Meta等企业。理想汽车是汽车行业中历史上第一家在 ISCA 工业赛道获得论文录取的企业。
能进ISCA 从来不是因为造了一颗芯片,是因为提出并实践了一种创新的架构思路。马赫 M100 架构团队将于 6 月 30 号在 ISCA 2026 会议现场进行主题分享,欢迎大家关注。
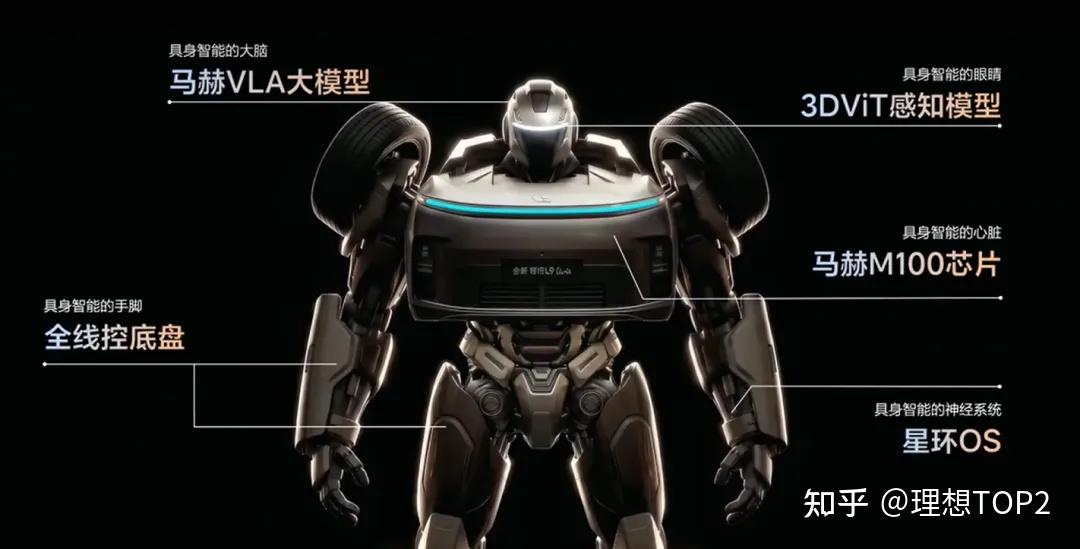
但最好的芯片还不够,我们在马赫 M100 的基础上构建了一套完整的具身智能系统。最强的心脏、眼睛、大脑、手脚、神经系统这些模块协同工作,形成一个完整的整体。

我要特别讲一讲星环 OS,星环 OS 是我们为具身智能专门设计的神经系统,从设计的第一天起,它就是为 AI 原生而生。它实现感知、决策、执行全链路深度融合,结合全线控底盘的极速响应,我们把端到端的时延压缩到了 0.28 秒,反应速度比人类快 40%。
这就是系统协同的力量。它不是芯片快,也不是软件快,是整个系统一起快。
我还想问在场的各位一个问题,苹果和安卓哪一个更安全?对,很多人回答苹果,为什么?因为苹果把芯片和操作系统放在一起设计。
安全它不是系统启动之后才开始安全,是从芯片上电那一刻就已经开始了。手机芯片被攻击泄露的是隐私,车的芯片被攻击威胁的是生命。
所以对我们来说安全不是功能,安全是底线。
这是我们自研马赫 M100 最重要的价值之一。

我们把密钥保护、设备身份、可信启动链、关键的权限管控全部前置到芯片设计中,再通过全栈自研的软件实现统一调度。
让芯片、编译器、操作系统、AI 算法在同一套可信的基础上协同运行,这是覆盖全链路的纵深防御体系。随着马赫 M100 量产部署,理想汽车已经实现了芯片、编译器、操作系统、AI 算法及域控制器的全栈自研。
系统的每一行代码、每一处硬件设计、每一套运行逻辑全部由我们自己掌控。自研马赫芯片和星环 OS 就是我们安全的底线。
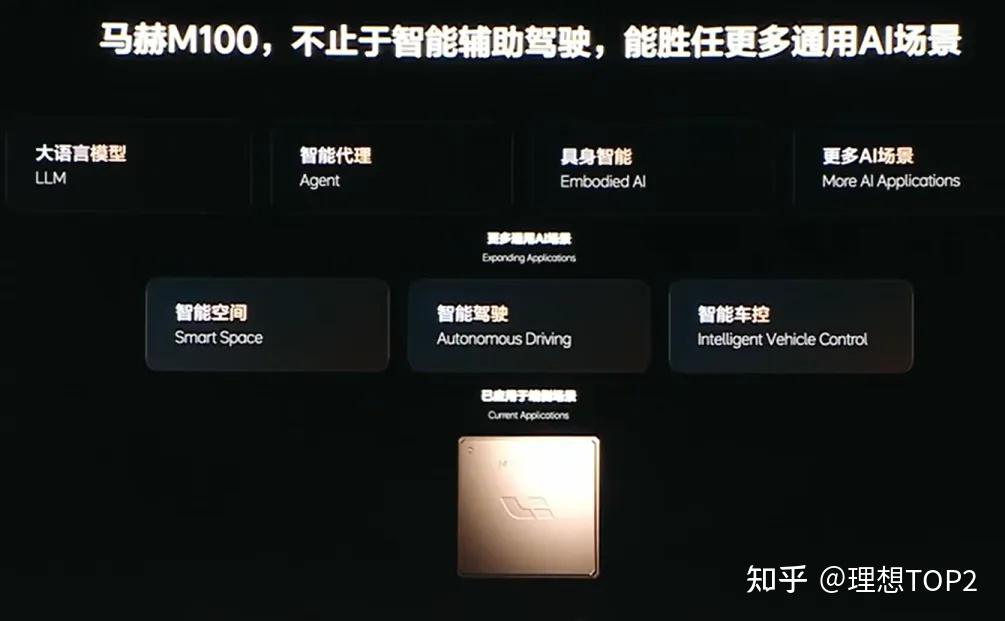
马赫 M100 的能力远不止于智能驾驶,它今天已经跑通了车上所有的智能化场景。它能运行语言大模型,它能支撑 Agent,它将驱动具身智能,它还会支持更多我们今天还没有想到的 AI 场景。
马赫 M100 会持续进化,更强、更快、更智能。这就是我们造这个芯片的原因,不是为了今天,是为了接下来 70 年。下面有请我们的产品经理李想为大家介绍具身的产品和体验。
李想
给我拍张照片,要不网上留下的都是我举桌子的。这个芯片最好旁边标上全世界性能最强的 AI 芯片。

模型有了,芯片有了,接下来要有什么?
很多人问我,你们天天都折腾什么?为什么要搞?为什么非要搞具身智能?在行业里有人说具身智能就是机器人,有人说是人工智能,有人说是智能驾驶,还有人说无非就是车机更聪明一点,辅助驾驶更强一点。
但我觉着他们全搞错了,这些都只是能力,不是产品,要有真正的产品才是最重要的。今天我们不是在把已经存在的功能再打磨一下,再卷一遍。
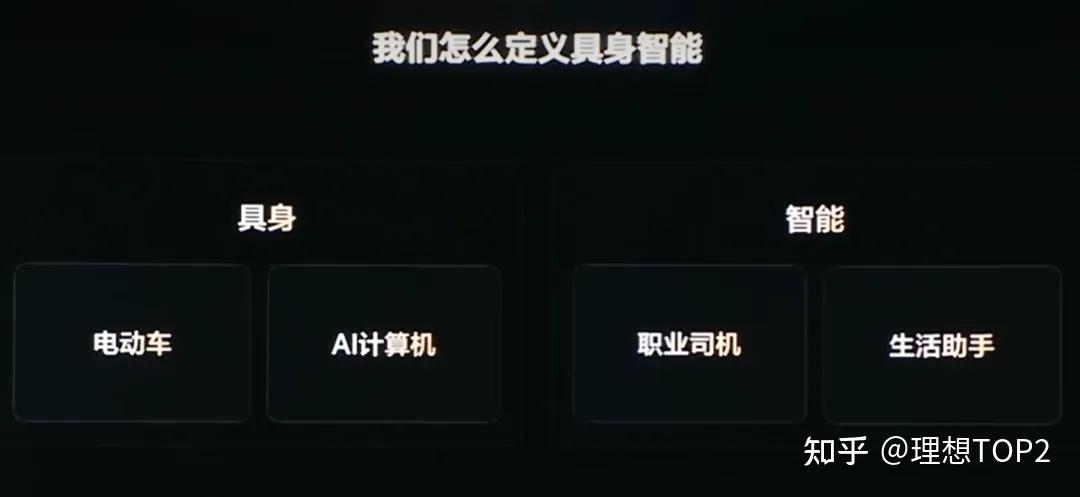
今天我们要回答一个更根本的问题,一辆车还可以是什么?我要给你们介绍四样东西。
第一,你们最熟悉它是一辆电动车,具身智能最终要服务于真实的世界,它需要有身体能移动,能到达目的地,真正参与我们的生活。
第二,它是一位职业司机,不只是辅助驾驶,是职业司机,它理解道路,理解风险,理解交通规则。它不仅能帮你从 A 点到 B 点,还能做更多,完全可靠地完成出行以及各种各样生活中的任务。
第三,它是一台 AI 计算机,它有比旗舰智能手机和电脑更强的 AI 算力,还有更大的内存。而且它的内存和显存是一体的,是专门为大模型设计的一体化内存。
第四,它是一个生活助手,你不需要研究怎么操作各种软件和各种新增的功能,只需要把你想要的任务告诉它,它来帮你完成。
它了解你的习惯,理解你的需求,帮你管理信息,处理你生活中各种各样的任务,成为你真正可以信任的伙伴。
四个产品大家明白了吗?这不是四个产品,这应该是一个产品。这就是理想汽车对于具身智能汽车的定义。
在 iPhone 出现以前,没有人知道自己需要触摸屏幕,在特斯拉 Model S 出现之前,没有人想到电动车可以这么让人心动。
所有没有被展示出来的可能性,往往会被误以为是不存在的需求。
今天我们带来的具身智能电动车和 AI 计算机是载体,职业司机和生活助手就是智能体现。我们先来看一看作为一台 AI 计算机和生活助手,它到底能做什么。我们有请我们两位产品经理来为大家做现场的展示。请相信我,这些展示都是真正运行在模型上的 Agent,绝不是提前写好的程序,胡含伊然(音)开始。

胡含
好,感谢想哥。下面就由我们来介绍一下。我们先做个自我介绍吧,我叫胡含,我看看理想同学能不能行。我们一开始先用一个最简单的任务切入,因为很多人还不太了解我们的理想同学。
依然(音)
理想同学,傍晚好,关闭全部车窗,氛围灯调成橙色,温度调到 18 度,把风量调为两档,外循环不要对人吹,打开阅读灯,再把理想演示厅打开。
理想同学
全都搞定了。
胡含
怎么样?非常的快,光速执行,这还只是一个开胃菜。因为这些都还是传统的规则式指令,还不是 Agent。我们今天会给大家介绍一下 Livis Agent。

我们首先进第一个演示,看一下屏幕上面会出现三个信息:航班号、餐饮习惯和洗尘宴的地址。大家想一想这是什么?这当然是生活中非常常用的一个助手场景。我们的朋友要坐飞机来北京,我们要去接他,然后给他安排一个符合他餐饮习惯的洗尘宴。
第一个场景,我想邀请现场的各位朋友们和我们的理想同学来做一个互动。大家可以根据这三个信息,用您手机上任何的 APP 来安排一条驾车的路线,好吗?大家可以掏出手机来进行相关的操作了,一会儿伊然也会让 Levis 来完成这样一个操作,我们比一比看谁快。好,我看到现场大家已经掏出手机在开始操作了。伊然,我们也让理想同学开始。
依然(音)
没问题,理想同学,我有个朋友要来北京,他的航班号是 CA1314。然后他是一个素食主义者,你先去接他,然后去望京找个餐厅吃洗尘宴,规划一下路线。
胡含
好,我看到现场大家已经在手机上操作了。理想同学也收到了这个指令,它目前已经听到了相关的内容,正在进行思考和推理。我们看到它现在已经开始思考,并且开始导航了,导航路线已经出来。
理想同学
规划好接机路线。朋友乘坐的 CA1314 航班,预计 19 点 05 分降落。
胡含
现场有没有还没完成这个任务的朋友?可以举手给我们看一下,目前还没有,看来还是理想同学更快一步,我们给理想同学先鼓个掌,好不好?其实这个指令,我想让大家感受一下简单的任务和简单的指令之间的区别。
这个任务其实很简单,我们日常生活中都会遇到,就是接机安排吃饭,非常简单。但是大家刚才用手机操作的时候就会有一个感受,它其实在操作上并不容易,并不是一个指令就能够完成的。我们需要通过航班 APP 找到他到底在北京的 T1、T2 还是 T3 航站楼,再用出行或者餐饮 APP,找到餐厅的位置。而这些我们的 Levis 都能够理解,都能够完成。
第一个场景看样子好像还不是那么复杂,对吧?我们再给他上一点难度好不好?我们还是看一下大屏幕。

上面出现了八个地址,这八个地址是北京著名的燕京八景,都是北京非常好的旅游景点,路线非常不错。我们让理想同学来看一看,接到了朋友之后,能不能胜任一个导游的角色,帮助朋友完成这样一个导游路线好吗?看看它知不知道燕京八景是什么,能不能够完成。好,伊然开始。
依然(音)
我觉得这个问题有点难,要让我自己来的话,至少得半小时,我来挑战一下。好,理想同学。
把北京的燕京八景全都玩一遍,先去金台夕照,最后去居庸叠翠,你帮我规划一条出游路线。
胡含
现场也是有点紧张,我们来看一下这个理想同学 Agent 是怎么来完成工作的。大家看到左边收到了指令之后,它会在这里进行相关的思考。它识别到这是一个复杂的出行任务,于是开始去搜索燕京八景具体的地址,在右面的地图上,大家看到它已经开始在工作了。每一个地方,比如居庸叠翠等等,它会找到之后再去编排路线,找到一条最顺路的路线。好。
理想同学
路线已规划好。从金台夕照出发,依次游览琼岛春阴、蓟门烟树、卢沟晓月、西山晴雪,最后到居庸叠翠,全程约 120 公里。
胡含
它还刚才贴心地提醒我们其中有一个景点,晚上八点就停止入园了。大家也看到,燕京八景为什么我们只规划了六个?伊然你给大家解释一下。
依然(音)
这里实际是因为玉泉趵突,还有太液秋风已经不对外开放了。而且刚才它判断有一个景点快到结束时间了,就没有放在路线里,我觉得我们 Livis 实在是太聪明了。
胡含
也就是说它不是非常生硬地像指令式导航一样帮你规划,而是它真的能够知道相关的实时信息,完成一个真正的出游任务。其实大家知道在开发的过程中,我们第一次跑通这个 case 的时候,我们产品和研发的同学都特别激动。现在想起来都是那种溢于言表的激动感。我们觉得这好像还不够,我们再上一个更高难度的,让大家来体验一下厂长的生活。大家来看厂长的生活,等大屏幕切一张照片。屏幕上面这张照片就是厂长的一家,厂长的夫人,还有四个孩子,因为厂长孩子多,生活就是这样。
厂长他一旦有时间的时候,都会自己开车接送自己的家人。那我们屏幕上面把题目放出来,这个题目是什么呢?厂长今天要自己开车扮演司机,把所有的家人按顺序都接到位,最后再陪老四去过生日,我们来看一看这样一个超级复杂的任务,理想同学到底能不能行。

依然(音)
理想同学,我老婆在蓝色港湾购物,老大在赵全营学美术,老二在望京学芭蕾,老三在中关村学乐高,老四在马泉营打羽毛球。先去接老大,然后去接老四,再去接老三,最后接上老二去接我老婆,晚上要给老四在三里屯过生日,帮我规划一条导航路线。
胡含
我们先给伊然鼓一个掌,这么复杂的任务一口气说下来了。我们看看理想同学听到这些指令之后,到底能不能搞定。目前来看三里屯找到了,好。这里面有一个可能是识别的问题,它识别到了三元。
胡含
好,找到了。
胡含
它可能有一点识别的小问题,我们让它自己先运行一会儿,然后我们再给伊然一个机会,好不好?好,我们把它停止,我们一会儿再来一次。
李想
重来一次才真实。
胡含
因为这样的指令真的说一遍,还是挺困难的。好,我们再来一次。
依然(音)
那我再来一遍,理想同学,我老婆在蓝色港湾购物,老大在赵全营学美术,老二在望京学芭蕾,老三在中关村学乐高,老四在马泉营打羽毛球。先去接老大,然后去接老四,再去接老三,最后接上老二去接我老婆,晚上要给老四在三里屯过生日,帮我规划一条导航路线。
胡含
这一次应该是没有问题了。看了一下上面的文本识别都是完全正确的。我们看看理想同学又开始工作了。这个问题难的地方在于,我们刚才介绍老大、老二、老三、老四地点的时候,和实际去接的顺序是完全不一样的。它能不能记住所有的地址,记住这样的顺序,并规划好过生日的完整路线。
理想同学
已规划好,从当前位置出发依次前往:一、赵全营接老大。二、马泉营接老四。三、中关村接老三,四、望京接老二,五、蓝色港湾接老婆,六、三里屯太古里给老四过生日,全程约 86.5 公里。
胡含
这太酷了对吧?所有的地址和所有的顺序一个没错,全部都完成了。所以我想问想哥你还满意吗?
李想
满意,但是强调一下,虽然孩子很多,但是老婆只有一个,大家不要乱猜。
胡含
所以我想如果厂长这样丰富多彩的生活都能够满足,咱们日常的出行需求,应该都不在话下。我们再来最后一个,刚才几个场景我们看到的都是理想同学对车机的控制,对吧?那么一个具身智能的 Levis Agent 不光能够控制车机,我们来看看它能怎么去控制整车。我们先来模拟一个场景,这个场景有一个切换。一开始我跟伊然会营造一个类似派对的氛围,我们会听一些欢快的歌曲,我们的朋友带了孩子,孩子可能要睡觉,会借用我们的车哄孩子睡觉。我们看一下这样极致的场景切换,理想同学能不能搞定。好,我们可以先准备一下这个派对氛围。
依然(音)
我们先听一首比较欢快的歌,我想大家可能都很熟悉这首歌了。
理想同学。二排小朋友困了,帮我哄他睡觉。
理想同学
摇篮曲响起,遮阳帘拉上,灯光调暗,音量轻柔,空调不对人吹,悬挂已调整为哄娃睡觉模式,宝宝的专属助眠环境已就绪。
胡含
好,理想同学已经完成了这一切,秒变婴儿车。我们车内的感受是什么呢?所有的声音瞬间降低了,播放了一首摇篮曲,空调调到了最轻柔的风量。我们也看到这辆车已经变成了一个摇篮,哄宝宝睡觉,这都是理想同学帮我们搞定的。
胡含
以上就是我们现场的演示环节,告一段落了。我有些东西想跟大家聊一聊,因为我们今天演示的都是一些超高难度的场景。可能有些人会说,这些我们生活中用不到。我想说AI 的演示,是希望让大家感受到它整个能力的边界。当这样复杂的能力都能满足的时候,我们日常更简单的生活需求都能够被满足。
我来给大家一些启发。比如说我们以后想安排大学同学聚会,可以把宿舍里同学现在居住的地址都告诉它,理想同学会帮你找到一个中心点。比如说有些孩子看视频喜欢反复看某一些片段,但孩子不知道片段是几分钟,他可以描述片段内容,用这样的方式来点播放。比如说有的时候我们需要安静的、温馨的、浪漫的空间氛围,我们都可以让理想同学来试一试,它会为您一键营造这样的氛围。
今天就是我们介绍的全部内容。我们在现场为大家准备了车辆,刚才演示的所有功能,现场的各位老师都可以去实车体验。另外线上的朋友们也不用着急,可以去就近的理想门店实际体验我们刚才的这些功能。好吧?我们大家一起多去尝试理想同学,挑战理想同学能力的边界,帮助它变得更快、更强、更好,好不好?
李想
这样的体验只有具身智能的架构才可以实现,而具身智能的上限取决于用户和产品经理的想象力,千万不要以人的能力作为上限。
这一切你看到的其实只是开始,只有你想不到的,没有 Livis 做不到的。光靠我们自己的能力成长,还是不能满足用户的广泛需求的。我们也需要各种合作伙伴的赋能。今天我想特别跟大家介绍一下我们的生态合作伙伴,他们都来到了现场。

因为有你们,Livis Agent 才可以变得更强。接下来我们再来看一看,当电动车和职业司机组合在一起会发生什么。
理想同学
检测到激光雷达被遮挡。我现在靠边停车。需要我帮您处理一下吗?
女士
好的,可以。
理想同学
问题解决了,谢谢。
李想
当我们的车辆遇到可能存在的危险,它能够自己安全停下来,并且告诉你到底发生了什么,和你一起解决,最后继续完成任务。这里很重要的是,它优先关注的是车主是否安全并做出决策,而不是只关注雷达如何工作。接下来我们继续看。
女士
帮我去新国展充电。
理想同学
新国展超充站四分钟后就没有空位了,我帮你查看了附近其他两个超充站,充电速度都比这里慢。
李想
有没有注意到,在这么一个复杂的任务里,车主全程只说了一句话,没有做任何操作。我们的角色就变成了一个乘客。Livis 能自主地完成复杂的充电任务,你什么都不需要做,节省下来的时间可以去喝咖啡、忙自己的事情,比你自己盯着充电效率高得多。接下来我们再继续。
女士
你怎么过来了?
理想同学
这里太窄了。我要出去掉个头再回来。
女士
你走吧。
理想同学
请您先行,谢谢。
李想
面对这种最难的停车位,它也能够自己去寻找更高效率的解决方式,同时处理路面上触发的各种突发状况,能够友好地沟通,独立完成任务,跟以往乱停车告别了。继续。
理想同学
我正在泊车,麻烦让一下。
男士
谢谢。对面施工,这里不让停车。
理想同学
好吧,那我换个车位。
理想同学
我们那边去,你那边还有空位吗?感谢,我现在就过去。
李想
有没有一种感觉,虽然它长得还像一辆汽车,但似乎它已经慢慢地拥有了生命,充满了人味,有没有这样的感觉?上面展示的能力其实只是具身智能的开始。我相信这一代产品未来还有十倍甚至一百倍的成长空间。
接下来我们来讲讲 OTA 的计划,今年我们依然会有丰富的 OTA 版本。但最重要的是七月、九月、十二月三个节点。
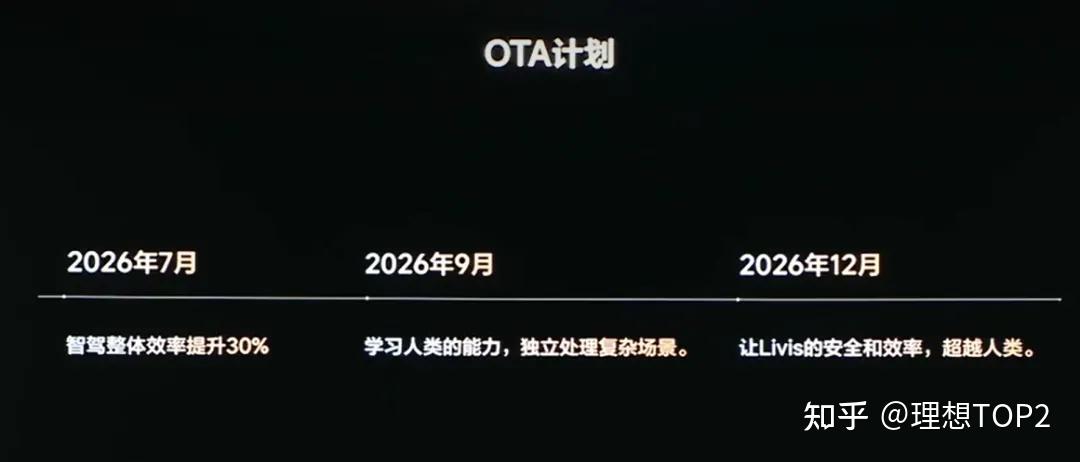
七月的主题是智驾效率整体提升 30%。

限宽墩、限高杆,哪怕你是纯新手也不用怕,Livis 替你安全通过。另外刚才现场展示的出行导游相关的 Agent 技能,也都将在七月的 OTA 中上线。
还有大家期待已久的、方便组队出游的车友对讲机功能也在七月提供。出门不用再带额外的对讲机,也不用考虑充电问题,比用微信还要方便得多。
另外到了七月份,两天一度电的哨兵模式也能够上线,还有利用主动悬架实现的便捷换胎能力,也都将在七月和大家见面。
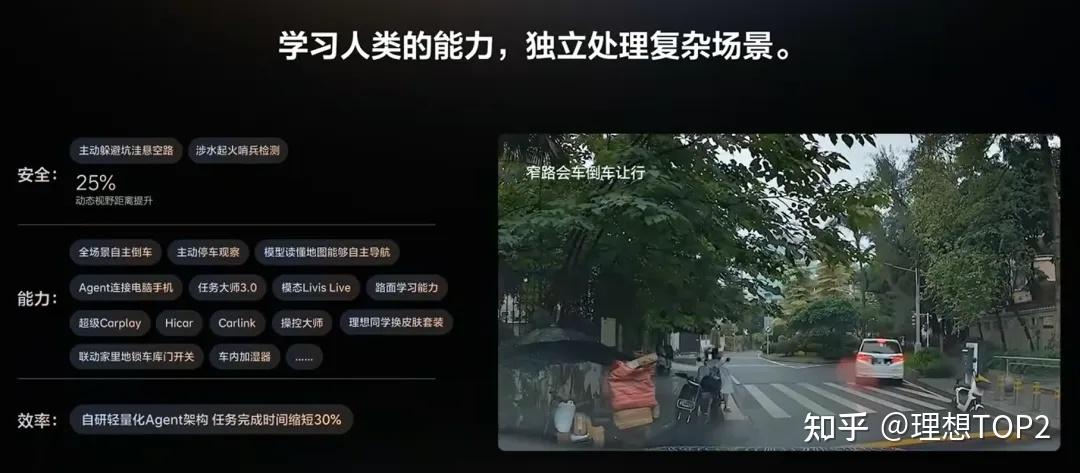
九月,Livis 就会学会像人一样全面的倒车技能,窄路会车、倒车让行,Livis 都能解决。它还会用主动悬架去处理各种复杂的路面,同时还能操控家里的智能地锁和开车库门。
九月份,Agent 还可以连接你的电脑和手机,调用上面的飞书、微信信息。同时最重要的是,九月份我们为大家准备了超级 CarPlay,以及所有音乐爱好者期盼已久的无损音质 Apple Music。

十二月,我们让 Livis 的安全和效率超越人类。我们有很多真实的案例,在智驾的过程中,用户去捡东西,不小心触碰到方向盘,退出了智能驾驶,发生了事故。
现在遇到相同的问题,Livis 会帮你解决,而不是只满足功能安全。哪怕是车主自己的误操作,它都可以主动保护你的安全。遇到紧急情况,当你打了方向,但打的角度不足以躲开危险,这时候 Livis 也会帮你修正。它会像专业的赛车手一样,找到最安全正确的轨迹,确保你的安全,同样不只是满足基础的功能安全标准。
在遇到交警疏导交通的时候,Livis 同样可以应对,它能够听从指挥有序通行,不用再尴尬地手动退出智驾。Livis 不仅能识别交警,还可以在你走近车辆的过程中,通过Face ID进行账号切换。
当你坐到驾驶位的时候,驾驶设置就全部同步完成。家里多人交替开车,再也不用切来切去了。并且我们将继续释放马赫 M100 芯片的全部潜力,十二月 Livis 的反应速度会继续提升,达到 0.2 秒,比人类快 56%,超过 F1 赛车手。
更高的效率不但能够提升使用体验,强大的性能,更重要的是安全也可以全面超越人类。
最后我们来整体回顾一下,什么是我们眼中的具身智能汽车。它是一辆电动车,是一位职业司机,是一台 AI 计算机,是一位生活助手。
它能够从功能安全进化到保护人类的安全,它能从调用功能进化到独立完成各种各样的任务,它能从运行缓慢进化到比人类更高的效率。
我知道这件事情非常难,但是如果我们真的做到了,想象一下人类的交通安全会有多大的提升,人类的出行效率会有多大的改变,人类的生活品质会不会进入到一个全新的时代。
过去十年我们创造了一个移动的家,在第二个十年我们会给车和家赋予生命,这就是我们这家公司存在的意义。我们也希望可以和我们的车主、在场的朋友、屏幕前的观众一起见证这个全新的时代。
最后我想再说一句,理想汽车坚持做最好的自己,不要期望我们变成别人。这也是我想讲给每一位朋友的,谢谢大家。