什么是纯粹的线控制动系统?
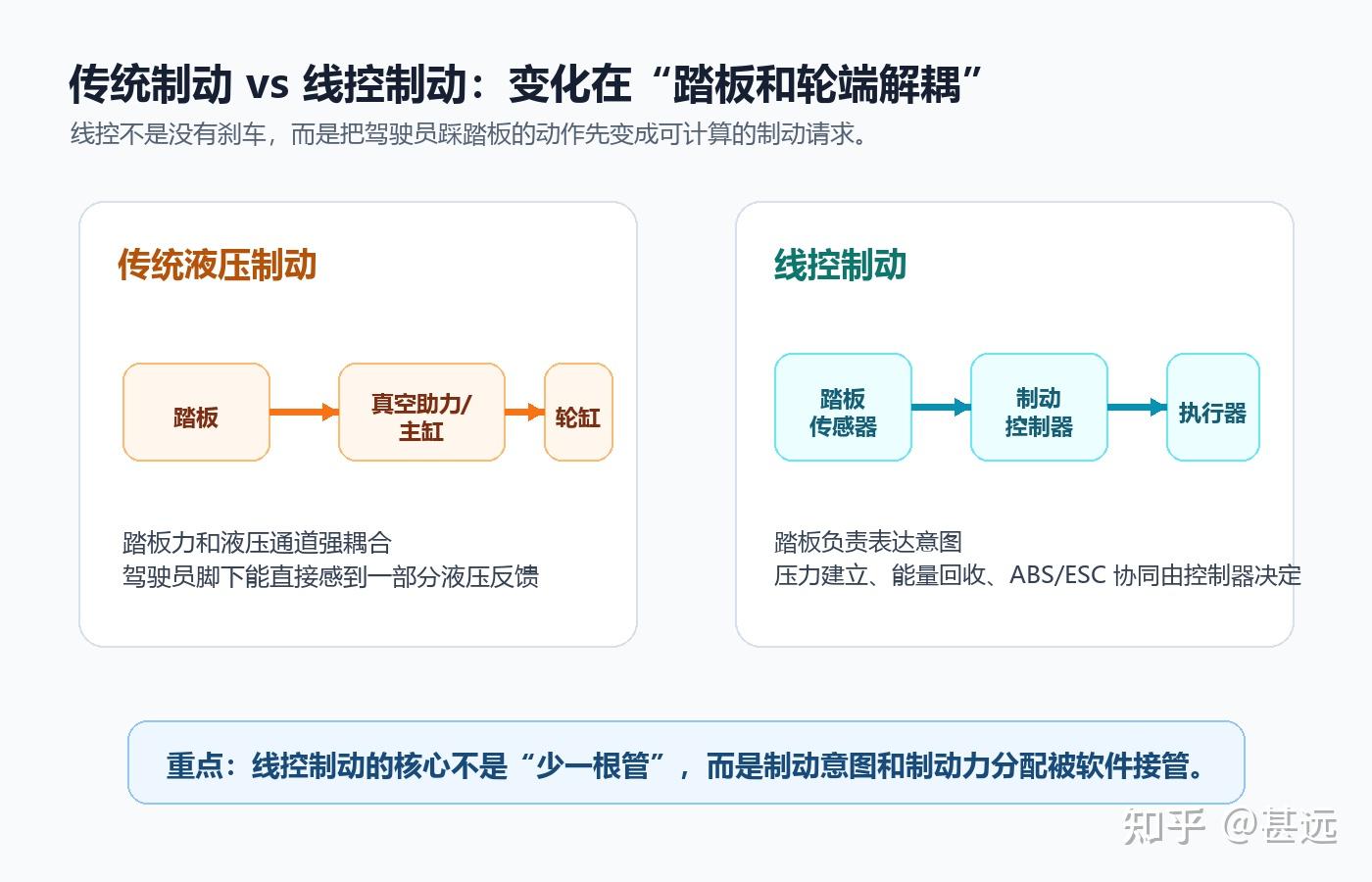
如果只用一句话解释,线控制动就是把驾驶员“踩刹车”的动作,从传统的液压机械链路里解耦出来,先变成电子信号,再由控制器决定如何建立制动力。
但“纯粹的线控制动”不能简单理解成把一根液压管换成一根电线。它真正改变的是制动系统的权力结构:过去踏板、助力器、主缸、液压管路和轮缸强耦合,驾驶员踩多少,液压系统就按机械关系建立多少压力;线控制动里,踏板更多是在表达驾驶员意图,轮端到底给多少制动力、多少来自电机回收、多少来自液压摩擦制动,则由控制器综合判断。
成熟的线控制动一定要谈冗余。比如踏板传感器通常不会只放一路信号,而是双路甚至多路互相校验;控制器要有监控逻辑和故障诊断;供电要考虑 12V 或 48V 掉电后的基本制动能力;执行层要有液压备份、蓄压单元或独立执行器;一旦检测到异常,要能降级,并给驾驶员明确提示,让车可控地停下来。
因此我判断一套线控制动系统成熟不成熟,不会只看宣传里“响应多少毫秒”。更应该看它的踏板模拟是否自然,能量回收和液压制动切换是否线性,低附着路面 ABS/ESC 介入是否干净,以及故障诊断、降级策略和法规验证是否扎实。
所谓纯粹的线控制动,最终不是为了炫技,而是让制动从机械部件的被动响应,变成可计算、可协调、可验证的整车控制能力。它听起来像底盘技术,实际上已经是智能电动车的基础执行层。

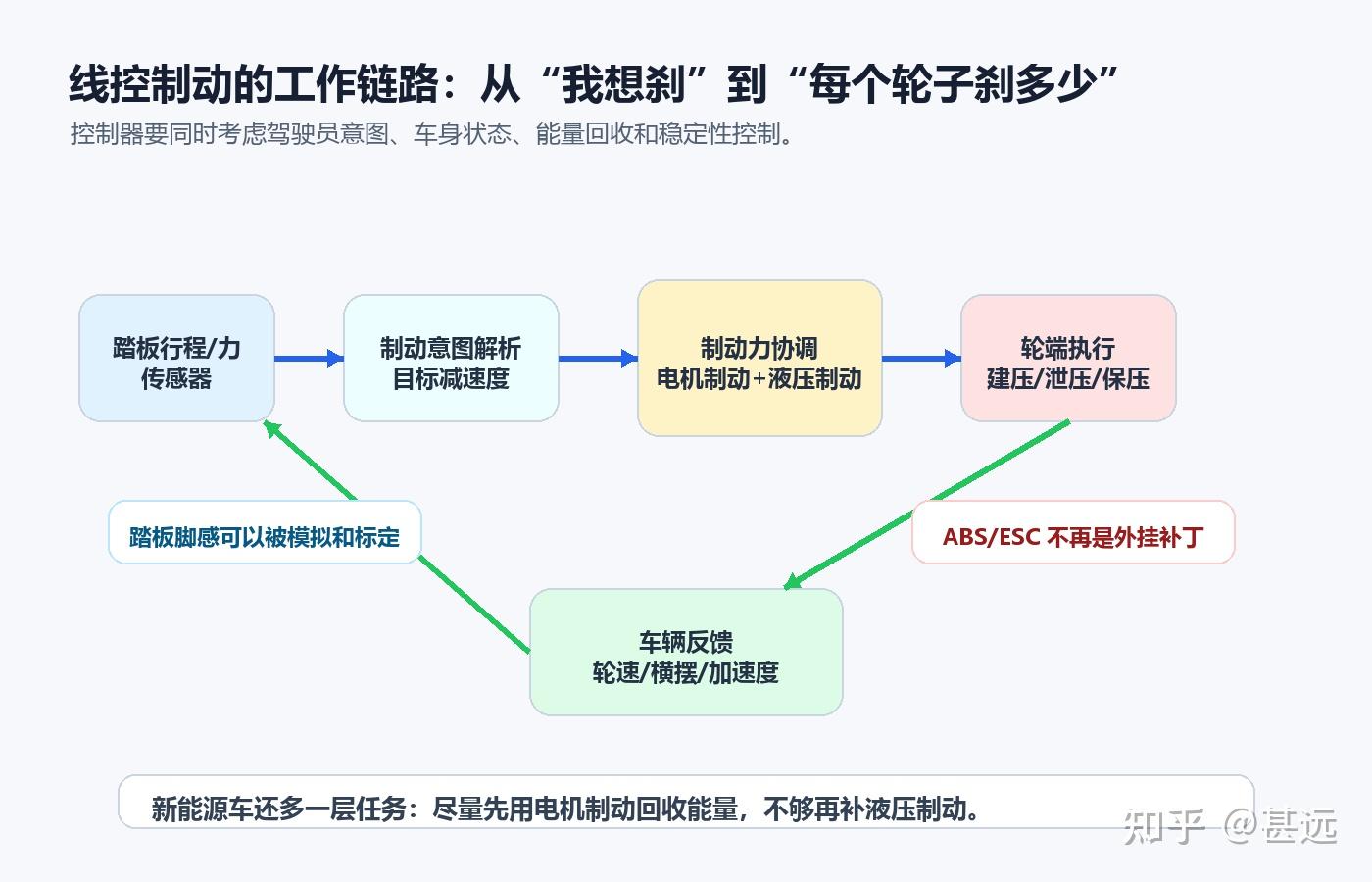
这也是为什么新能源车特别适合发展线控制动。电动车本来就有电机制动,松电门或踩刹车时可以回收一部分动能。如果仍然完全沿用传统制动逻辑,电机制动和液压制动就很难做到平顺协调:轻踩时到底先回收还是先夹刹车片,回收不够时怎么补液压,ABS 介入时怎么快速切断回收,这些都需要控制器统一调度。
线控制动的工作链路大致是:踏板传感器读取行程、速度和力;控制器把它解释成目标减速度;再结合轮速、横摆率、纵向加速度、路面附着、SOC 和电机回收能力,分配电机制动和液压制动;最后由执行机构在轮端建压、保压或泄压。
所以它带来的好处不只是“响应快”。更重要的是,制动踏板脚感可以被模拟和标定,能量回收可以做得更自然,ABS/ESC 和自适应巡航、自动紧急制动也能更紧密地接在同一条控制链路上。对自动驾驶来说,这一点尤其关键,因为系统必须能稳定、可重复地给出减速度,而不是依赖一个人脚踩出来的液压压力。
但线控制动最敏感的地方也在这里:制动变成电子控制后,大家最担心的不是正常情况下能不能刹住,而是传感器异常、控制器异常、供电异常、通信异常时系统怎么兜底。
成熟的线控制动一定要谈冗余。比如踏板传感器通常不会只放一路信号,而是双路甚至多路互相校验;控制器要有监控逻辑和故障诊断;供电要考虑 12V 或 48V 掉电后的基本制动能力;执行层要有液压备份、蓄压单元或独立执行器;一旦检测到异常,要能降级,并给驾驶员明确提示,让车可控地停下来。
因此我判断一套线控制动系统成熟不成熟,不会只看宣传里“响应多少毫秒”。更应该看它的踏板模拟是否自然,能量回收和液压制动切换是否线性,低附着路面 ABS/ESC 介入是否干净,以及故障诊断、降级策略和法规验证是否扎实。
所谓纯粹的线控制动,最终不是为了炫技,而是让制动从机械部件的被动响应,变成可计算、可协调、可验证的整车控制能力。它听起来像底盘技术,实际上已经是智能电动车的基础执行层。