部分新能源车主反馈,冷车启动后倒车影像加载慢,如何解决?
作为电子电器架构砖家,cao sir可以负责任的说这类系统架构设计问题绝不止华为一家独有!
首先我们首先要明白一个概念,车上的摄像头布置在车的前后左右,而控制器在车辆中控区域,这些视频数据是怎么传递给控制器的?
目前行业主流的是用SerDes(GMSL / FPD-Link)协议,也即:
- 摄像头端:Serializer(串行器)
- 车机 / 域控端:Deserializer(解串器)
- 介质:同轴电缆 / 屏蔽双绞线(STP)
这种传输协议通过菊花链方式进行扩展连接,也即是图像数据需要从一个设备,再传递给另一个设备,而无法从一个视频源同步传递给多个目标控制器.

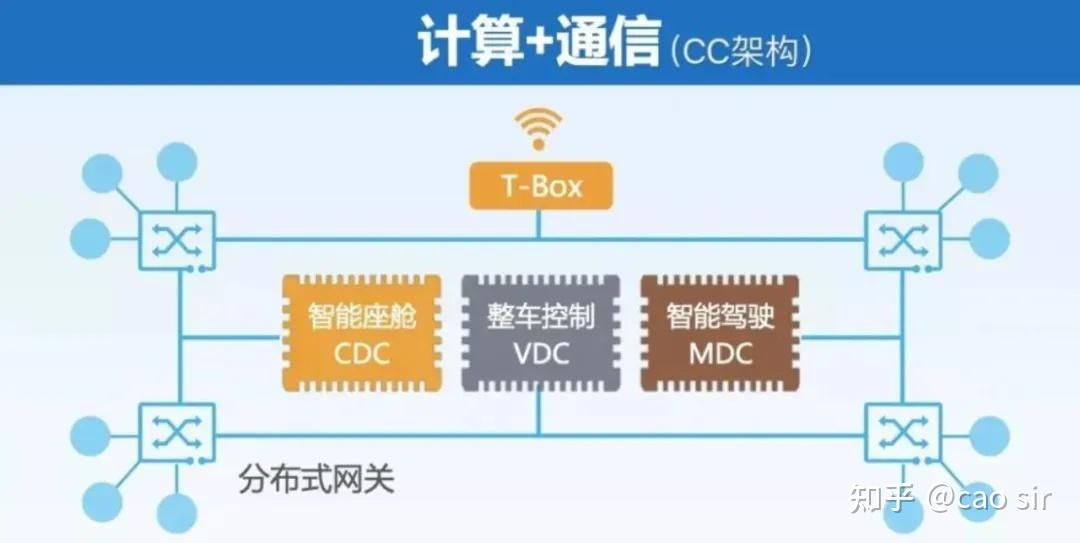
再具体看下华为的iDVP架构里面智舱和智驾控制器分开的(分别是智舱控制器CDC,智驾控制器MDC),在当前架构设计下,摄像头数据首先输入智驾控制器MDC支持智驾所需的信息.当需要显示360影像时,智驾控制器MDC会把裁剪拼图后的360视频流输出给智舱控制器CDC做显示.
这种做法智舱控制器CDC和智驾控制器MDC都正常工作状态下完全没有任何问题,但是整车下电休眠后,冷启动场景下,如果智舱控制器CDC比智驾控制器MDC更快从sleep转换到ready状态,那么就会出现CDC第一时间拿不到MDC传输过来的360影像,实际表现就是加载慢问题.
这种智驾和智舱两个控制器醒来不一致问题是必然会发生的,因为两个控制器运行的操作系统和加载的内存信息并不相同.
那要如何解决这个问题呢?
首先有一个简单粗暴的方案,聪明的你一定想到了,那就是保持智舱控制器CDC和智驾控制器MDC在保持下电后不会休眠,持续正常运行,这样客户在上车第一时间360影像都会展示出来,这样做带来的问题也很明显,就是能耗高,且控制器长期不休眠大大降低使用寿命.
第二种做法也是业内普遍做法,就是当车主锁车休眠后下次打开车门前提前把这两个控制器从休眠中提前唤醒,当车主坐进车里时候,两个控制器已经准备好了一切,主打一个早起晚睡.这个方案也不是万能的,如果客户快速坐进车里,或者下电后立马上电还是可能会碰到出现这种问题,因为毕竟两个控制器的冷启动时间很难做到完全一致.
要想彻底解决这个问题,就是要让智舱控制器CDC和智驾控制器MDC同时切换到正常工作状态,有一个终极方案:
使用STR(Suspend To RAM,挂起到内存)设计,也就是休眠后保持最小化的系统运行,当收到唤醒指令时候,能够在极短时间实现全系统正常加载,实现 “秒开”.
这个方案与让智舱控制器CDC和智驾控制器MDC持续保持工作相比会大大降低功耗,且提升了控制器的使用寿命,但是它最大的问题实施起来并不简单,需要当前电气系统从硬件、BSP、内核、系统框架、应用、电源策略、整车电气、测试全链路改造。
1. 硬件层(最底层、最贵)
- 电源管理 IC(PMIC)/ 板级电源
- 支持 RAM 保持供电(VDD_RAM) 与其他域下电分离
- 精确控制电压 / 时序、防浪涌、防过放
- 新增 唤醒源硬件通路(ACC、CAN、钥匙、门碰、蓝牙、RTC 等)
- SoC / MCU
- 支持 CPU 上下文保存 / 恢复、深度睡眠、快速唤醒
- 内存(DRAM)必须 自刷新(Self-refresh) 支持
- 外设(GPU / 显示 / 音频 / 以太网 / CAN)可控下电 / 上电、无漏电
- 整车电气 / 蓄电池
- STR 静态电流通常要求 < 1~3 mA(否则几天亏电)
- 增加 电量监测、低电自动切 STR → 深度休眠(Suspend to Disk)→ 关机 保护逻辑
- PCB / 散热 / EMC
- 电源分割、地分割、低功耗回路重新设计
- 休眠 / 唤醒瞬态不干扰其他 ECU(仪表、ADAS、车身)
2. 内核 & BSP 层(工作量极大)
- Linux 内核电源管理
- 适配
suspend/resume流程:sys/power/state、dev_pm_ops - 每个驱动(LCD、Touch、Audio、ETH、CAN、Sensor、MCU 等)必须实现 suspend/resume 回调:
- 休眠:保存寄存器、关闭时钟 / 电源、禁中断
- 唤醒:恢复寄存器、重新初始化、重同步、状态重建
- 唤醒源(Wakeup Source)管理:仅允许指定源唤醒,其余屏蔽
- 唤醒锁(Wake Lock)机制:防止应用 / 服务阻止进入 STR
- VHAL(Vehicle HAL)适配
- 车规级信号:ACC ON/OFF、IGN、12V 电压、车门、车速、休眠请求
- 与车身域(BCM)时序协同:谁先休眠、谁先唤醒、故障处理
- Bootloader / 安全启动
- STR 恢复路径绕过完整 Bootloader,但仍要做完整性校验
- 防止休眠 / 唤醒中数据损坏、攻击、异常复位
3. 系统框架层(Android Automotive / Linux / QNX)
- 电源管理服务
- Android:
CarPowerManager、PowerManagerService、WakeLock全量适配 - 定义整车电源策略:
- 熄火后多久进 STR(1s/5s/30s 可配置)
- 低电保护阈值(11.8V/11.5V 等)
- 深度休眠切换、超长停放关机
- 系统服务 & 进程管理
- 休眠前:冻结后台、保存状态、释放资源、有序退出
- 唤醒后:快速恢复、重连服务、重连网络、状态同步
- 防止:休眠卡住、唤醒黑屏、音频爆音、网络断连、应用崩溃
- 跨域协同(座舱 / 仪表 / ADAS / 车身)
- CAN/LIN/Ethernet 消息:休眠请求、休眠确认、唤醒通知、同步时序
- 多屏 / 多虚拟机:主从休眠、主从唤醒、状态一致
4. 应用 & 生态层
- 所有系统应用(主页、音乐、导航、蓝牙、语音、空调)必须支持休眠 / 唤醒:
- 保存播放进度、导航路线、用户设置
- 唤醒后无缝恢复、不闪退、不同步延迟
- 第三方应用权限与行为约束:禁止滥用 WakeLock、禁止唤醒后卡死
- 车机 - 手机互联(CarLife/HiCar/CarPlay):重连、重认证、状态同步
5. 功能安全 & 异常处理(车规核心)
- 异常场景全覆盖:
- 休眠中 12V 掉电、电压波动、碰撞、快充插入
- 唤醒中 ACC 瞬间断开、CAN 异常、应用死锁、内存泄漏
- STR 失败回退:自动降级冷启动、日志上云、故障码(DTC)
- 防亏电策略:
- 定时自检电量、连续多天低电强制关机
- 维修模式、运输模式禁用 STR
因此,这个STR技术目前在业内很少应用,cao sir知道业内有几家计划在下一代架构迭代中把这个方案带进去~
以上!