如何评价小米YU7 GT以10分29秒483创下全球首个纽北自动驾驶圈速记录?
有一说一,小米这个智驾跑得都比某些车的人驾都快。

10分29秒483,这是小米YU7 GT在德国纽博格林北环赛道用自动驾驶系统跑出的圈速,也是人类历史上第一次有车辆在纽北完成官方认证的自动驾驶圈速记录。没有人类干预,方向盘后面没有人,全是算法和传感器在绿色地狱里跑完整整一圈。

就在一个月前的5月,同一台YU7 GT,由小米签约专业车手文森特驾驶,以7分22秒755的成绩刷新了纽北SUV圈速纪录,比此前的纪录保持者奥迪RS Q8 Performance快了13秒多,比保时捷Cayenne Turbo GT快了16秒以上,而且弯道对决保时捷Cayenne Turbo GT取得32胜17负1平的压倒性优势,一举登顶纽北史上最速SUV。
而一个月后,小米把方向盘完全交给自动驾驶系统,同一台车给出的答卷是10分29秒483。


而且值得注意的是,这个成绩还是在路面潮湿+天上飘雨的情况下跑出来的,感应雨刮器全程都在刮雨,甚至急速也被限制在了210km/h。
虽说和专车手相比慢了3分07秒,但是10分29秒483这个成绩放在普通赛车爱好者里面已经是相当快的了。文心给出的解答是:一般人跑一圈下来圈速大概会在13-15分钟左右,不排除大胆一点加上技术过硬的话可以缩短到10-12分钟,但要跑进10分钟内对普通人来说难度极大。
但是不管怎么说,小米用自动驾驶跑纽北,这是全球第一次。
在此之前,全球范围内没有任何一家车企或科技公司,在纽北正式跑完过一个被官方认证的自动驾驶圈速。从智驾诞生到现在也有大约10年了,我觉得用智驾跑纽北这个idea不是没人想过,而是纽北这个地方真的太要命、挑战性太强了。
纽博格林北环赛道全长20.8公里,拥有177个弯道,垂直落差达到了304米。它的路面宽度变化剧烈,盲弯多到让人头皮发麻,有连续高速弯角比如“狐狸洞”、“旋转木马”,也有连续上下坡比如“飞机场”这些知名路段,还有几段在森林里穿梭时视线几乎为零的复杂路段。对于人类驾驶员来说,要在这条赛道上跑出一个体面的圈速,已经需要经过大量专业训练和赛道熟悉。在这种地方要求自动驾驶系统独立完成一整圈,对感知系统的极端工况识别能力、预测系统对动态环境的建模能力、规划系统在极限状态下的路径决策能力,都是地狱级别的压力测试。
这和平时在高速上用NOA跟车、或者在城区里自动变道超车,完全不是一个维度的事情。城区路段你面对的是红绿灯、行人、低速车辆,决策周期可以相对宽松;但到了纽北,对100几十公里的时速下入弯、出弯时机的把握,对重心转移时的轮胎附着力边界的管理,这些是人类顶级赛车手需要数年沉淀才能合理处理的工况。自动驾驶系统要在这里跑完一圈不出事、而且还有一个合理的圈速,说实话,放在三年前如果有人告诉我能做到,我是不信的。
现在我们有了第一个基准数字:10分29秒483。
这个数字的意义,不是说“自动驾驶已经很厉害了”,而是说“自动驾驶跑赛道已经可行了”,并且随着算法和硬件的迭代升级,这个成绩还会更快,迟早有一天能完全超过一个成熟的职业车手的圈速。
YU7 GT本身的硬件底子有多硬?
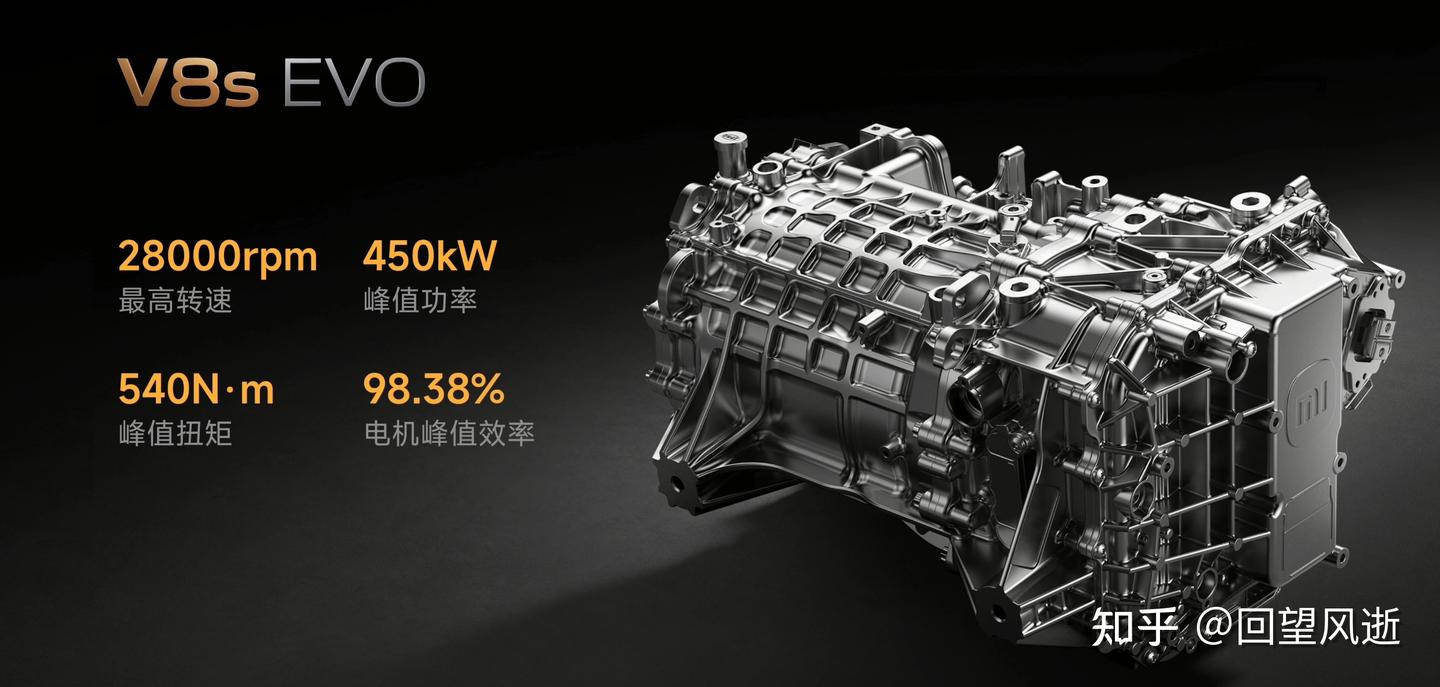
顺带聊聊这台车本身的素质。小米YU7 GT是一台定位"跑车级SUV"的产品,指导价38.99万元、大满配42.99万元。动力系统上,前轴放了一台288kW的V6s电机,后轴搭载了目前行业最强量产电机V8s EVO,单台峰值功率450kW,转子转速干到了28000转。两台电机协同工作,综合功率738kW,折合1003匹马力。一台两吨半的中大型SUV,零百加速2.92秒,极速300km/h。后电机通过上百万次仿真与拓扑优化,在完全不用碳纤维缠绕的前提下做到了这个转速——说人话就是,没上昂贵的碳纤维方案,靠工程手段硬把转子结构优化到了极限,既控制成本又保住了量产良率。
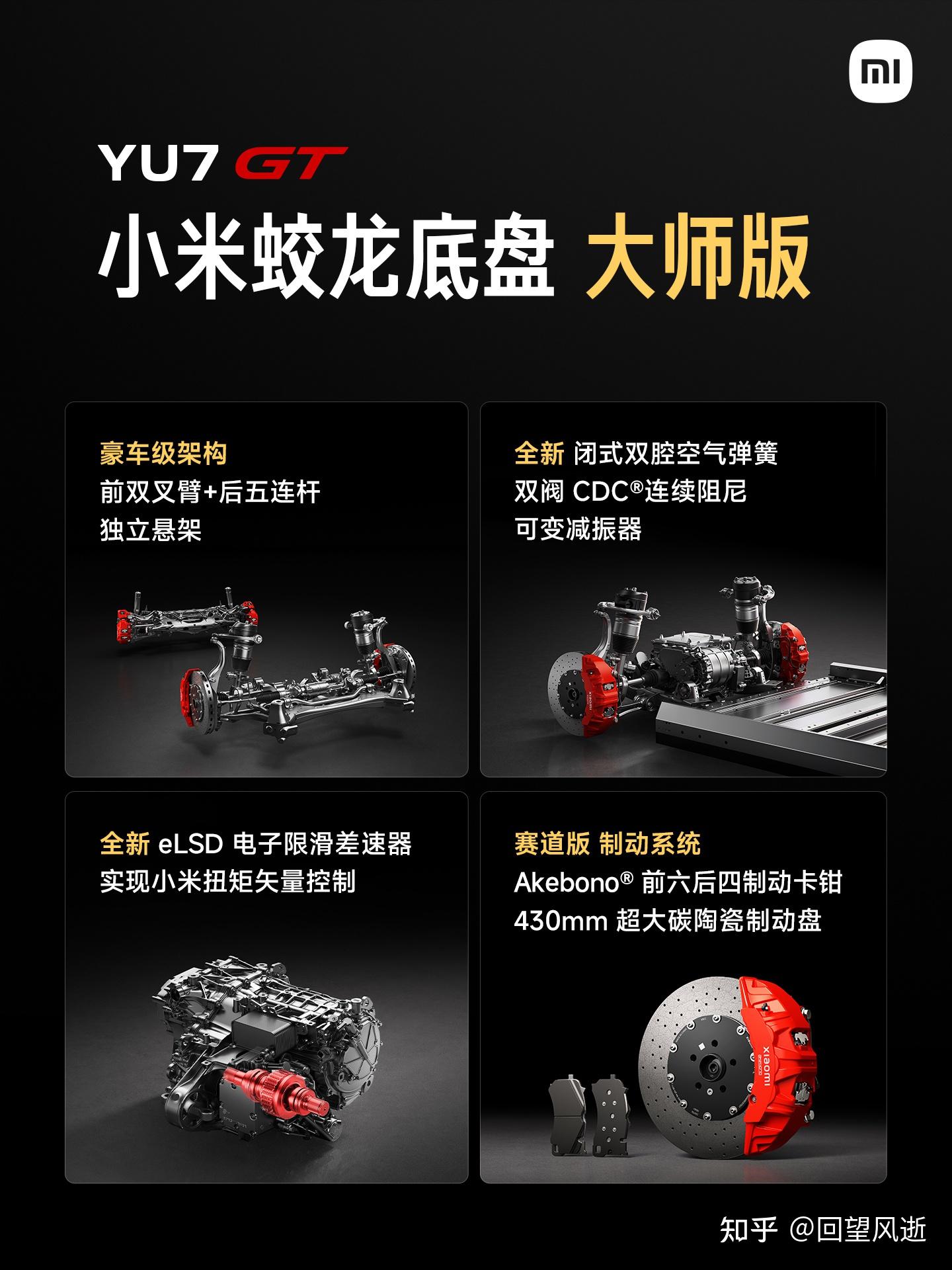
底盘层面,YU7 GT上了小米“蛟龙底盘大师版"”,闭式双腔空气悬架加双阀CDC减振器,空气悬架给到了75mm的调节范围,双阀CDC独立控制压缩和回弹阻尼。后轴标配了eLSD电子限滑差速器,在高速过弯出弯时可以毫秒级把动力分配给抓地力更好的外侧车轮。
刹车上了前六后四的阿基波罗固定卡钳,配四块碳陶制动盘,一共减了57kg簧下质量,耐温1300度,支持100km/h连续刹停50次、180km/h连续刹停10次、200km/h连续刹停8次不发生热衰减。三电方面,101.7kWh三元锂电池、897V全域碳化硅高压平台、5.2C充电倍率,CLTC续航705公里,12分钟10%充到80%。
说真的,这台车的硬件底子是实打实的,弯心速度对比保时捷Cayenne Turbo GT赢32个、平1个、输17个的数据真不是靠PPT跑出来的。
从“智驾能不能跑完”到“智驾能跑多快”

我觉得看待这件事的视角,必须换到一个工程师的逻辑上来,传统上我们评价纽北圈速,核心看的是“快”。
比如保时捷跑多少、奥迪跑多少、小米跑多少,数字越小越好。这是性能车世界的玩法。但当一辆车用自动驾驶跑纽北的时候,评价框架应该变了——第一个里程碑不是“10分29秒算快吗?”,而是“它真的能完整地、无人干预地跑完一圈吗?”。
它跑完了,而且跑出了一个合理的、有量级意义的圈速,这本身就是从0到1。
说实话,你可以想象一下这件事的工程难度。在纽北上,自动驾驶系统要面对的是连续的大G值变化、路面附着力的剧烈切换、弯道半径从几十米突然缩到几米的突变、还有上下坡对车辆动态的干扰。
人类赛车手跑纽北靠的是肌肉记忆、赛道熟悉度和千锤百炼的本能反应,而自动驾驶系统靠的是激光雷达、4D毫米波雷达、视觉感知和路径规划算法的实时运算。一个是生物神经网络,一个是硅基计算。在这条全世界最复杂的赛道上,两者第一次有了可量化的对比数据,这件事本身的工程价值就远超圈速数字本身。
而且别忘了,人类赛车手文森特是经过专业训练、对这条赛道了如指掌的驾驶者。7分22秒的速度来自于极限的走线选择、精确到毫秒的刹车点判断、还有过弯时对轮胎极限附着力的“人肉传感”。这些东西在自动驾驶系统里,现在靠的是算法在做近似。算法能做到“不失误”,但暂时还做不到人类赛车手那种“贴着极限走”的极致,这恰好解释了3分7秒的差距。
对行业意味着什么?
有一说一,这件事对整个智驾行业的影响可能比很多人想的要大。
目前行业里对自动驾驶的评价主要集中在安全性、接管率、城区覆盖率这些维度上,这些指标当然重要,但它们都是在日常公共道路场景下产生的,道路条件相对可控。纽北这种极端工况,对自动驾驶系统的考验是全方位的——不仅是感知能不能识别弯道,更是预测模型在高速工况下够不够稳、规划算法在极限状态下的边界管理合不合理、控制系统在连续大G值变化下的执行精度够不够。
说人话就是,如果在纽北上能跑出10分29秒,那么在日常高速和城区路况下,这套系统的能力下限已经有了非常可靠的保障。纽北就是智驾系统最严酷的试金石,能在绿色地狱里安全跑完20.8公里,回到公路上的信心就完全不同了。
这还没说到数据积累层面。纽北一圈下来,自动驾驶系统在极端工况下的感知数据、规控日志、各子系统的极端应力表现数据,这些是你在任何模拟环境里都拿不到的东西。这些真实的、极端的路测数据,对后续算法迭代的价值是不可估量的。算法优化100遍,远不如在纽北上实打实跑一圈来得立竿见影。
当然,这必然会有争议。肯定有人说“慢了3分多钟,一个赛车手跑出来的零头都不如,有什么值得庆祝的?”也有人会说“智驾能跑赛道,就一定代表城市/告诉NOA也好?”
我觉得这种质疑心情上完全可以理解,但逻辑是反的——你不能因为第一位登上珠峰的人没坐直升飞机上去,就说登山这件事没意义。意义从来不在于“第一次就打败了人类”,而在于“第一次完成了,从今往后就有了可以对比、可以迭代的基准”。
10分29秒483,就是自动驾驶在纽北的“第一条基线”,下一次跑出9分多钟、再下一次跑出8分多钟,每缩短一分钟,都是智驾系统在极端工况下能力的质变。
往后看

从我个人角度来看,这件事最值得期待的其实是未来。
如果小米汽车能把纽北自动驾驶圈速做成一个持续更新的项目:每个季度、或每半年去跑一次,追踪算法迭代后的圈速变化曲线,那将是一个极度难得的纵向对比数据集,这个进步曲线本身就具有碾压级的说服力,比任何白皮书写多少页技术指标都有用。
当然,3分7秒的差距也不是那么容易追上的。人类的直觉、经验、对轮胎极限附着力的“手感”,这些东西暂时还是算法无法复制的。但自动驾驶有一个人类赛车手永远没有的优势:它可以被无限复制、无限优化。文森特只有一个,但一套成熟的智驾软件可以部署到每一台车上。当算法足够成熟的时候,“人人都是文森特”就不是一句空话。当然,那一天还需要非常漫长的技术积累。


曾经保时捷说:“让我们在下一个‘赛道’再见!”
小米用YU7 GT再次在纽北打破保时捷留下的记录之后,今天又用智驾给了保时捷一点“小米震撼”。一家从零起步造车不到五年的中国企业,先是用SU7 Ultra打破了保时捷的记录,再用YU7 GT打败了奥迪的圈速,接着又用自动驾驶跑完纽北全圈。你可以说它还有很长的路要走,但你不能否认的是,它已经走在路上了,而且这条路全世界还没第二个人走过。
小米汽车官方说“这不是终点,是驶向更高边界的新起点”,让我们一起期待美好的事情继续发生!