目前自动驾驶定位技术国内外研究现状是什么样的?
九大汽车定位技术深度横评,谁才是自动驾驶的“定海神针”?

在现代汽车技术领域,不论是一般驾驶者还是自动驾驶系统,都需要可靠的定位技术来保证车辆的精准定位和安全行驶。目前,主流的汽车定位技术主要包括全球导航卫星系统定位、惯性导航系统(INS)定位、地图匹配定位、无线通信定位、磁定位以及视觉定位等。
这些技术各有其优势和限制,涵盖了从全球性定位到更为局部的环境感知。选择适当的定位技术取决于特定的应用场景、定位精度需求以及成本考量。
1 全球导航卫星系统(GNSS)定位
全球导航卫星系统是一种基于卫星的无线电导航系统,如图1所示,用于提供高精度位置、速度等信息。现有卫星定位系统主要有美国的全球定位系统(GPS)、俄罗斯的全球导航卫星系统、中国的北斗卫星导航系统及欧盟的伽利略全球导航卫星系统等。
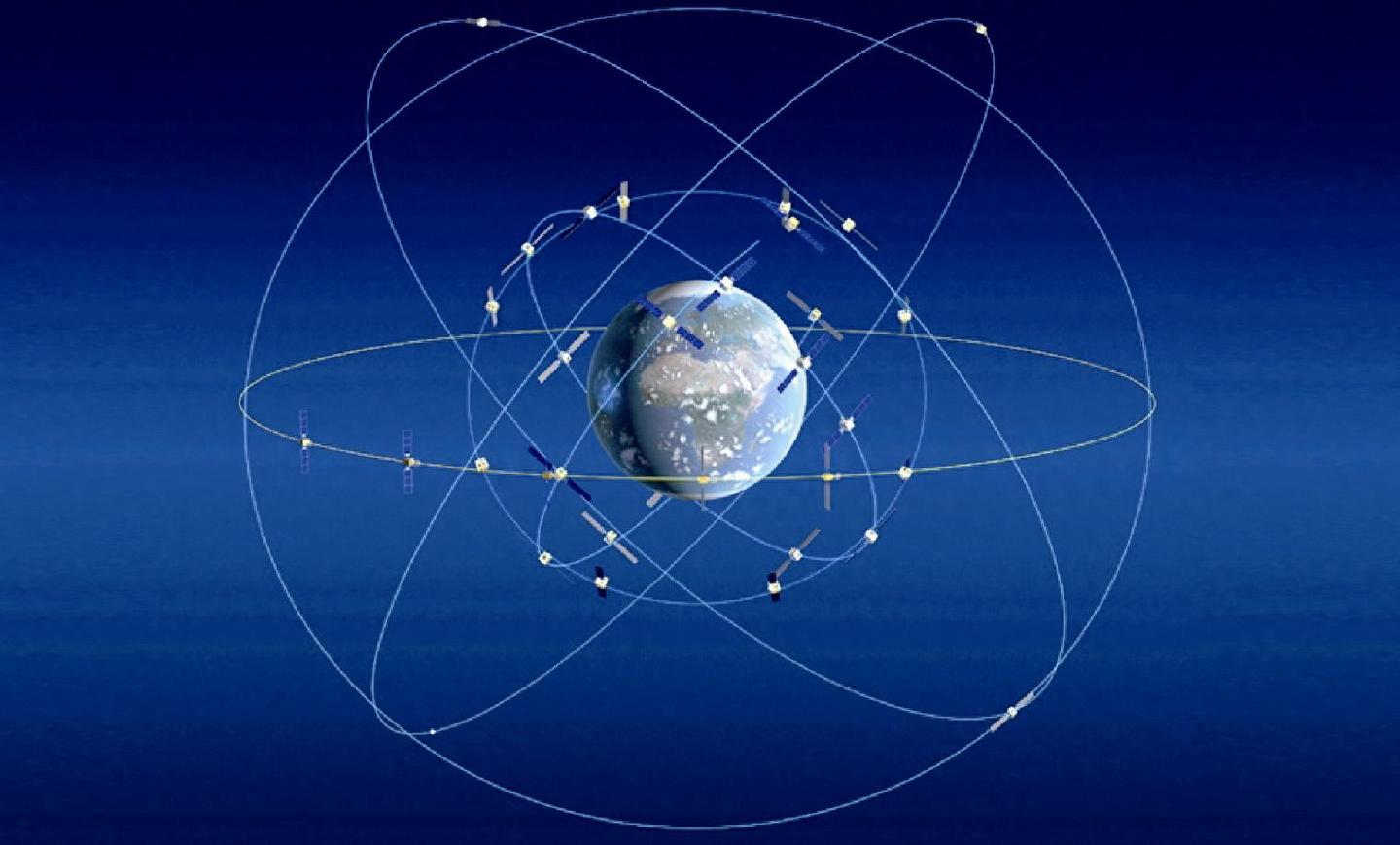
全球导航卫星系统能够提供实时、全天候、全时段的定位服务并且可以直接给出汽车在世界坐标系中的绝对位置信息。全球导航卫星系统定位设计为多卫星系统,即使部分卫星失效,系统仍可继续提供服务,保证了较高的服务连续性;可以依靠多国卫星系统的合作,如GPS和北斗,提供冗余保障,增强系统的全球覆盖和抗干扰能力,具有较高的可靠性。
目前全球导航卫星系统技术已广泛集成到手机、汽车和航空航天技术中,用户界面友好,易于获取和使用。但是,其定位精度只能达到米级,并且信号在高层建筑、隧道、立交桥、浓荫大道等区域会发生漂移,导致其定位精度变差甚至出现定位丢失等问题。
在极端气候条件下,如太阳风暴,全球导航卫星系统信号可能受到严重干扰,影响其性能和安全性;同时,全球导航卫星系统设备能够追踪到个人的具体位置和行为模式,可能会对个人隐私以及安全造成威胁;对于使用全球导航卫星系统进行精密导航的设备,如车辆自动驾驶及飞行设备,若信号受到干扰或欺骗极易造成严重事故。
2 激光雷达(LiDAR)测距定位技术
与全球导航卫星系统相比,激光雷达测距定位技术具有更高的精度以及更强的环境适应性,该技术基于激光脉冲的时间飞行原理,利用激光测量物体与发射源之间的距离,如图2所示。
具体来说,激光雷达设备的激光发射器会发射一系列定向激光脉冲,当这些脉冲击中目标物体后,会被反射回来并由设备内的接收器捕捉。接收器随后记录下激光脉冲从发射到返回的时间,并利用该时间乘以光速,从而准确计算出与目标物体的距离。
相比于传统的测距技术,激光雷达可以在各种光照条件下工作,不受日夜变化的影响,能达到厘米级的精度,非常适合进行高精度地图创建和环境建模,且强大的穿透力使其能够在恶劣天气条件下也可工作,保证定位结果的可靠性。
然而激光雷达系统通常价格昂贵且在定位过程中产生的数据量庞大,需要复杂的算法和强大的计算资源来处理和解析,在实际应用过程中可能产生较大的延迟。此外,由于激光脉冲可能会穿过或被完全反射,因此激光雷达在穿过透明或高反射表面时可能会失效,若将其应用在智能驾驶领域,可能会影响对这类障碍物的识别。
若能通过优化数据处理算法,减少激光雷达系统对硬件资源的依赖,将能提高此定位技术的实时性,也可将激光雷达与其他传感器技术相融合以提供更全面和可靠的环境感知能力。
3 惯性导航系统(INS)定位
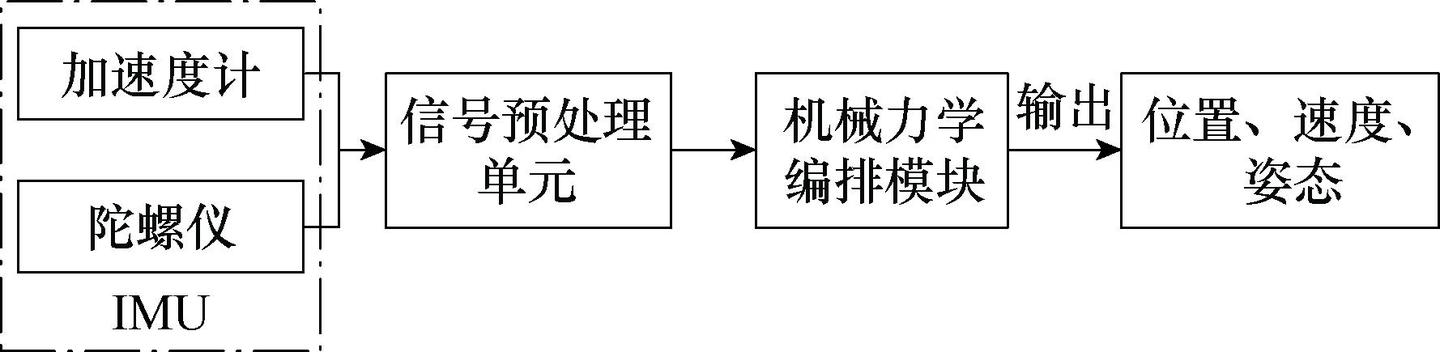
在一些激光雷达可能失效的环境中(如高反射表面),惯性导航系统依赖内部传感器,不需要外部信号,仍能维持定位能力。惯性导航系统主要由惯性测量单元(IMU)、信号预处理单元和机械力学编排模块组成,通常包含三轴加速度计和三轴陀螺仪,惯性导航系统组成如图3所示。
惯性导航系统依靠内置传感器实现自主定位,利用加速度计和陀螺仪的输出进行两次积分,从而获得三维位置信息和旋转信息。惯性导航系统广泛应用于航空航天(如飞行器导航)、海洋航行(如潜艇定位)、自动驾驶(如无人驾驶汽车)、消费电子(如智能手机导航)和地震监测(如地震活动追踪)等领域。
具体数据显示,当前市场上高精度惯性导航系统系统的定位精度可达0.1%~0.5%。惯性导航系统通过内置传感器实时计算位置和方向,无需等待信号传播,因此响应速度快,适合动态环境和高速运动的应用场景,在短期内惯性导航系统可以提供非常精确的位置信息。
然而,由于惯性导航系统的定位误差会随时间积累,在长时间定位中误差可能会达到数公里,这限制了惯性导航系统定位技术在长期应用中的有效性。而高精度的加速度计和陀螺仪价格高达数千美元,使得其无法广泛用于消费级产品,且其定位精度会受到温度振动以及其他环境因素的影响。
在一些应用中,如无人机即车辆导航,常常将惯性导航系统与GPS结合使用,以实现互补优势即GPS提供长期导航,而惯性导航系统用于在GPS信号丢失的短暂时段定位。
4 磁定位
与依靠机械传感器的INS不同,磁定位通过感知磁场的微小变化来确定位置,由于磁定位不受物理振动或温度变化的影响,它在一些特定环境中比INS更为稳定。
最基本的磁定位方法是基于地磁进行定位,但其在获取初始位置时存在一定的困难。为了提高定位精度,目前主流的磁定位技术采用在道路中埋设磁信号源的方法,常见的信号源包括磁带、信号电缆和磁钉,以及三者的组合使用,如图4所示。
这些信号源能够创建稳定的磁场,使得磁定位系统的精度通常可达10~20 cm。埋设磁信号源的磁定位方法虽然精确,但部署和维护成本高,需要对现有路面结构等基础设施进行较大的修改,虽然磁定位不受天气和光照影响,但它极易受到来自道路上的车辆、附近的建筑物或其他任何含有金属的物体的干扰。
磁定位可以用于辅助自动驾驶汽车和其他车辆的精确导航,特别是在GPS信号受限的环境中,如隧道或城市高楼之间的街道。

5 无线通信定位(UWB)
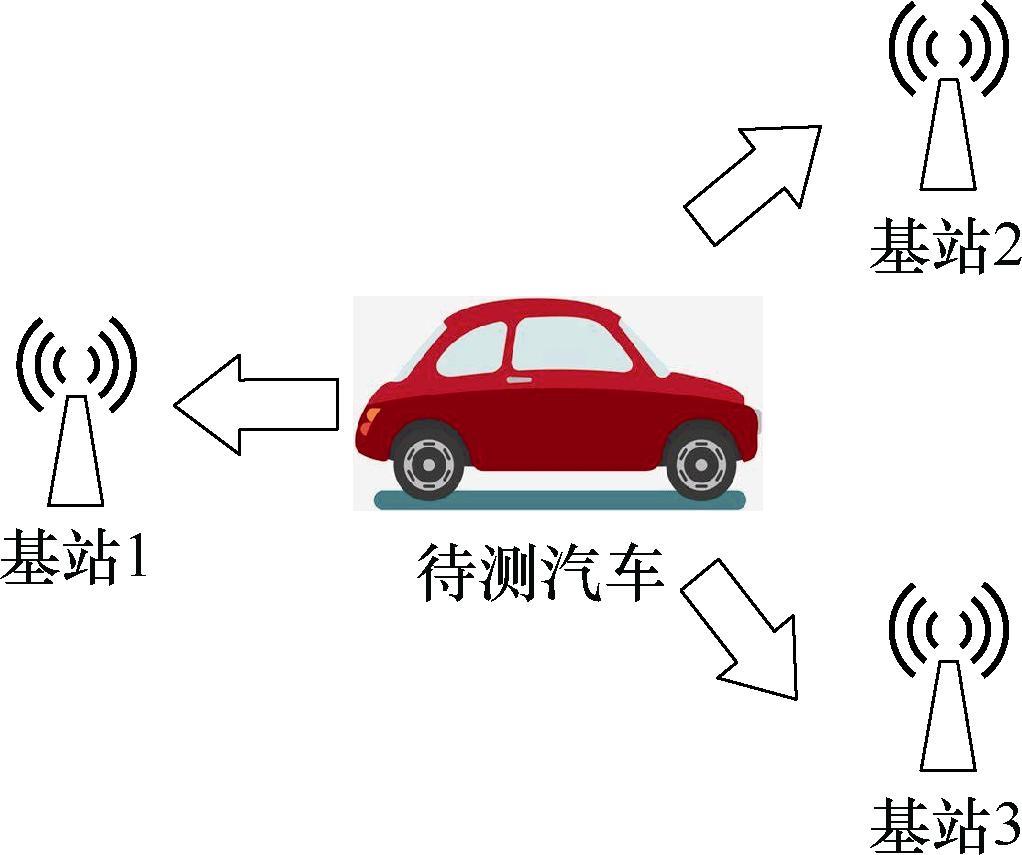
与磁定位相比,无线通信定位在室内或地磁较弱的环境中定位性能通常更优,它可以利用多个基站之间的信号差异来提高精度。其中,UWB定位技术尤为突出。UWB技术通过发射非常短的非正弦波形脉冲(通常在ns~ms级别),利用这些脉冲的到达时间或到达时间差来确定位置,其定位原理如图5所示。
UWB的定位精度可达10 cm以内,在复杂环境中,如有多个反射面的场所,UWB技术因其脉冲宽度短,能够有效区分直达信号和反射信号,从而可以减少多路径效应的影响但仍不能完全避免。由于UWB信号宽频带特性使得其具有较好的穿透能力,能够在一定程度上穿透墙壁和其他障碍物,在实际运行中UWB在发送短脉冲时消耗的能量较少,适合长时间运行的应用。
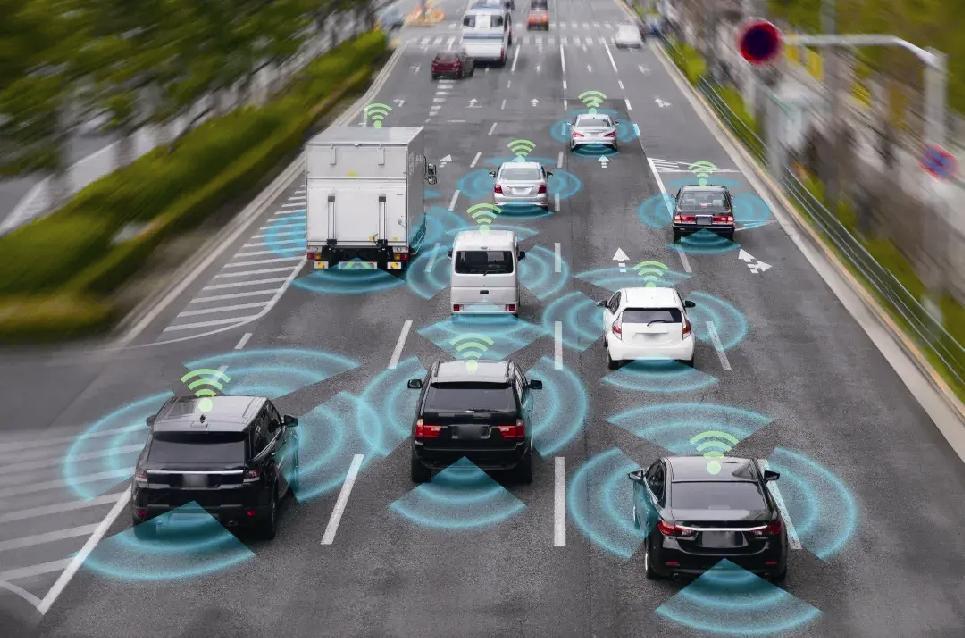
在车路协同系统中,UWB可以用于精确测量车辆之间的距离和位置,从而提高道路安全,特别是在复杂或拥挤的交通环境中。此外,UWB也可以在停车场中用于自动泊车系统,提供精确的车位定位。然而,UWB也面临一些挑战,如其硬件问题导致的晶振偏差和动态定位中的动态误差。此外,UWB基站的部署需要大量的人力、物力和财力,使其在室外大规模环境中的应用受到限制。
.6 地图匹配定位
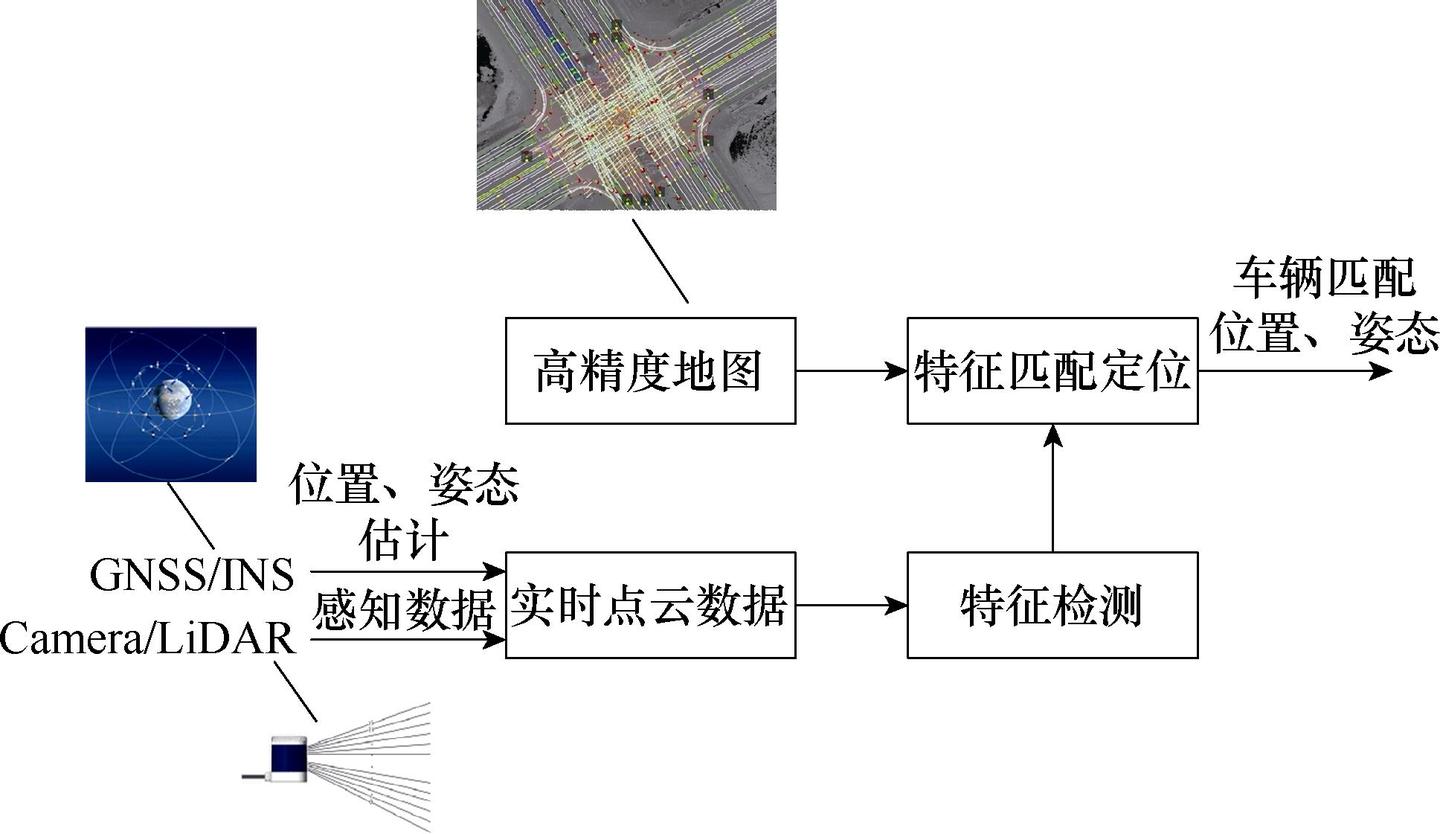
相对于基于信号的无线通信定位,地图匹配定位技术通过与预构建的高精度地图对比来确定位置,在视觉或激光雷达数据丰富的城市环境中精度更高。尤其是在复杂的道路网络中,地图匹配定位流程如图6所示。这种技术主要包括视觉地图匹配和激光雷达地图匹配两种方法。视觉地图匹配通过相机捕获周围环境的图像,并与地图中的图像特征进行匹配以估计车辆的实时位置。
这种方法成本相对较低,但对光照条件敏感,且在环境或视角变化大时可能出现匹配错误。视觉匹配的定位精度通常在10~30 cm范围内。激光雷达地图匹配利用点云信息与预先构建的地图进行匹配,这种方法不依赖光照,因此在多种天气和光照条件下均能稳定工作。
激光雷达能提供更高的定位精度,约为5~10 cm,非常适合需要精确导航的应用。然而,这种技术的设备和维护成本较高,数据处理也较为复杂。地图匹配技术有效地避免了误差累积,使定位精度可达cm级,广泛应用于自动驾驶和智能交通系统。
尽管如此,这种技术的制作和维护相当复杂且成本高昂。高精度地图的创建和定期更新需要大量的投资,激光雷达测绘每km的成本可达数万元,并且需要频繁更新以反映环境的变化,增加了长期运营的经济负担。
7 视觉定位系统
与地图匹配技术相比,视觉定位对环境的视觉特征依赖更大,而不是仅仅依靠地理位置数据。该系统通过摄像头捕获周围环境的图像,并利用计算机视觉技术分析这些图像来确定设备的位置和方向。这一过程包括识别图像中的特征点,如角点、边缘或其他显著特征,并将这些特征点与已知的地标或地图数据进行匹配。通过这种匹配,系统不仅能够计算出设备在空间中的精确位置,还能确定设备的姿态,即在空间中的方向。视觉定位系统如图7所示。
相比于激光雷达等高成本传感器,摄像头更为经济,易于大规模部署。视觉定位系统广泛应用于自动驾驶汽车、机器人导航和增强现实等领域,特别适用于GPS信号受限的室内环境。然而其精确性高度依赖环境光照条件,在光线不足或反射强烈的环境中可能会受到影响。视觉定位系统通常会与其他传感器技术结合使用,提高定位的准确性和鲁棒性[62]。

8 扫码定位技术
相比于视觉定位技术,扫码技术则提供了一种更直接且控制性强的定位方法,适用于指导用户到达特定位置。这项技术通过在特定位置放置标记的二维码或条形码实现,在定位过程中,二维码通常被打印并贴在各种物体或建筑物上,如图8所示。
当用户使用智能手机或专用扫描设备扫描这些二维码时,内置或第三方应用程序解析出编码的数据,并将其转换为具体的地理位置信息。扫码定位系统的核心是二维码的信息密度和安全性,二维码可以嵌入大量数据,包括网址、地理位置标识符和其他元数据。这使得二维码不仅可以存储位置信息,还可以包含有关该位置的具体详情,如访问时间、安全访问权限等。
然而,这也带来了安全挑战,因为二维码容易被复制或篡改。若未采取适当的安全措施(如加密、动态生成二维码等),可能导致信息泄露或误导用户到错误的位置。目前扫码定位技术可以与其他系统集成,如GPS定位以及增强现实(AR)技术,以提高用户体验和定位准确性。例如,扫描二维码后,系统可以激活手机的AR功能,显示覆盖在用户实际环境中的虚拟路径指示。此外,结合使用GPS可以在室外环境中验证二维码的物理位置,可以增加系统的鲁棒性[63]。

9 蜂窝网络定位技术
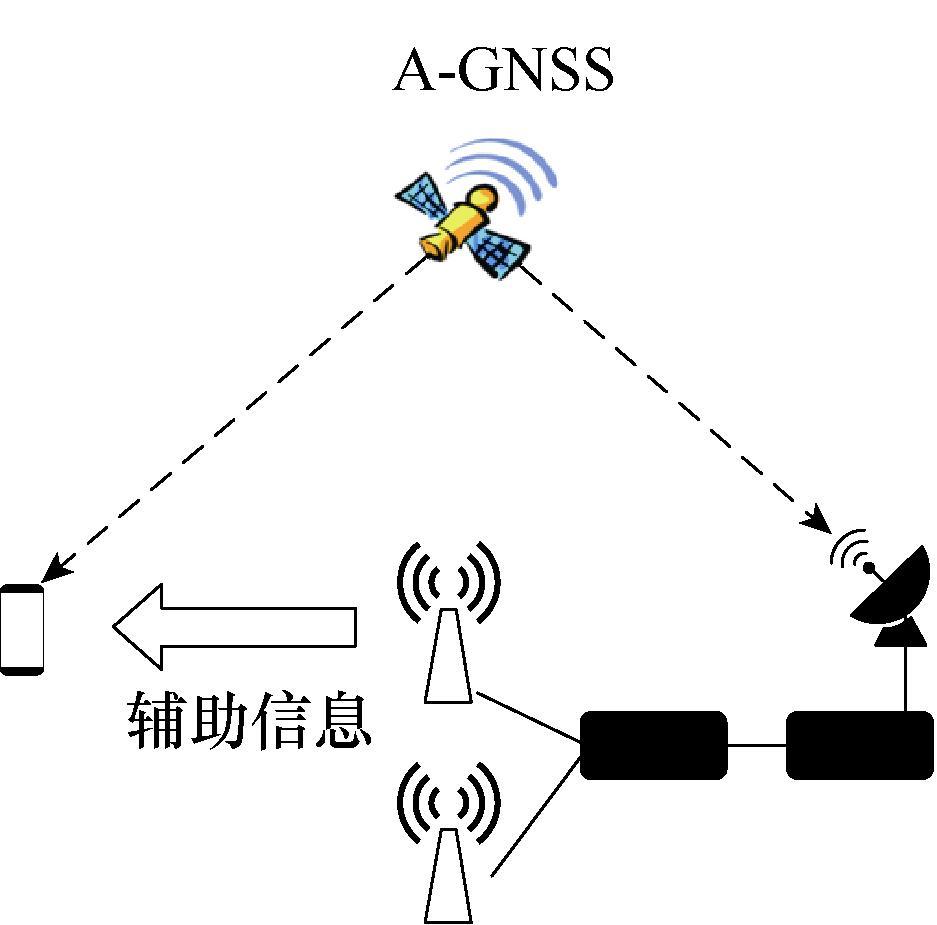
与扫码定位相比,蜂窝定位不受物理位置标记的限制,能够在更广泛的地区提供连续的定位服务。该技术通过分析移动设备与周围蜂窝基站之间的信号特性(如信号强度、到达时间差或角度)来确定设备的位置[64]。它无需额外硬件,依赖现有通信网络,能够在GPS信号弱或不可用的环境中提供位置服务。蜂窝网络定位系统如图9所示。
蜂窝定位方式包括基站定位、信号强度三角定位、到达时间差(TDOA)定位、到达角度(AoA)定位等,每种蜂窝定位技术具有不同的优点与局限性,适用于不同的应用场景。
基站定位因其成本低和操作简便而广受欢迎,尽管其精度受限于单一基站信号的范围,通常在几百米至几千米,适用于对精度要求不高的场景。信号强度三角定位则可以通过测量设备与多个基站之间的信号强度差异来提高位置精度,但其性能在建筑密集或地形复杂的地区可能会受到影响。
TDOA技术依靠精确测量信号到达不同基站的时间差来实现更高精度的定位,虽然这需要基站间有良好的时间同步,增加了技术复杂性和成本,但特别适合需要严格定位精度的工业和安全应用。AoA技术通过测量信号的到达角度来进行定位,尽管高级感知方向的硬件成本较高,但能够在基站密集的城市环境中提供极高的精度和丰富的方向信息,非常适合复杂的城市导航和密集的人流管理。
在基站密集的地区,如城市中心,蜂窝定位的精度可以显著提高,然而在基站稀疏的地区,如农村或偏远地区,定位精度和可靠性大幅下降。这项技术广泛应用于导航、紧急服务、物流管理和地理围栏等场景,具有覆盖范围广、能耗低的优势。
上述多种汽车定位技术的对比见表1。

在精度方面,激光雷达地图匹配定位以其高精度(5~10 cm)和稳定性强在技术中突出;而视觉定位虽具备高精度但易受环境光线及计算能力的影响;惯性导航系统在长期使用中误差累积显著;全球导航卫星系统在复杂环境如高楼或隧道中精度显著下降;蜂窝网络定位的精度则高度依赖于基站的分布密度;而扫码定位虽在小范围内具有高精度,但需要用户主动操作。
在实时性方面,激光雷达和视觉定位因反应迅速,特别适用于如动态避障和自动驾驶等需即时响应的场景;UWB和磁定位也显示出快速响应能力,但应用场景受限。
在成本方面,惯性导航系统和激光雷达较高,适用于不受成本限制的技术领域;相反,GNSS和扫码定位成本低廉,更适合成本敏感型应用。在环境适应性方面,磁定位在无金属干扰的环境下性能稳定;视觉定位在环境变化大时,尤其是恶劣天气下,性能可能受影响;而激光雷达在高反射表面则可能失效;GNSS在密集城市或室内环境中的表现也较差。
因此,选择合适的定位技术需要考虑具体的应用场景,以确保在不同环境中获得最佳的定位效果。
本工作成果发表在2025年第14期《电工技术学报》,论文标题为“电动汽车动态无线供电系统位置检测技术研究综述”,作者为哈尔滨工业大学的高鑫、司哲伦、朱春波。本课题得到国家自然科学基金面上项目和黑龙江省博士后面上基金项目的支持。