小鹏汽车 CEO 称 2024 年将量产飞行汽车,售价 100 万内,可能性有多大?技术上有哪些难点?
了解一下电动汽车飞机电机方面的技术研究进展,有点长,建议收藏。
沈阳工业大学研究者发表电动飞行汽车用推进电机技术的学术综述
相比于地面电动车辆,电动垂直起降飞机(eVTOL)(也称电动飞行汽车)具有可垂直起降、避免交通拥堵、绿色环保的优点,在不远的未来具有较大的应用潜力。推进电机是eVTOL的核心,然而,目前对eVTOL推进电机的研究仍处在起步阶段,还未有系统性的归纳和总结,同时eVTOL推进电机的关键设计问题和方法尚不清晰。
为此该文首先对eVTOL推进电机发展现状和研究动态进行综述;其次与现有车用驱动电机进行对比,并结合其典型工况需求和关键设计问题进行分析和探讨;最后,对eVTOL推进电机的高密度、高可靠和低噪声设计技术进行总结和展望,指出未来的发展方向和先进技术趋势。
电动垂直起降飞机(electric Vertical Take-Off and Landing aircraft, eVTOL),也称电动飞行汽车,继陆地行驶电动汽车(Electric Vehicle, EV)之后,近年来成为绿色能源交通领域的研究热点,有望助力“双碳”目标的早日实现。
2014年,美国国家航空航天局(National Aeronautics and Space Administration, NASA)联合美国垂直飞行学会(Vertical Flight Society, VFS)、美国航空航天学会(American Institute of Aeronautics and Astronautics, AIAA)和汽车工程师学会(Society of Automobile Engineers, SAE),发布的《电动垂直起降飞机(eVTOL)公共服务技术白皮书》指出,到2037年航空运输旅客每年将达到82亿人次,比现在翻一番,航空业的碳排放将达到全球碳排放总量的25%。如果要实现2050年将碳排放量减少到2005年水平一半的目标,绿色航空成为必然选择。
与传统航空飞机相比,eVTOL具有清洁、安静等优点,可以垂直起降,且不需要航空跑道,运营成本较低,成为航空领域的新模式,有望成为现有交通技术的重要补充。这种技术也被称为城市空中交通(Urban Air Mobility, UAM),这个概念是Uber公司于2016年提出的,此后NASA、美国空军等均对此进行研究,它有望成为支持大规模开发和利用清洁能源的标志性技术,同时有望缓解日益严重的交通拥堵问题。未来,采用全电动或混合动力电驱动系统的eVTOL可能为航空运输带来新的技术变革。
近几年来,欧美各国已经开始全面实施eVTOL发展战略,各国政府都颁布了相关政策法案。如2020年4月,美国空军启动AFWERX“敏捷至上”计划,旨在加速先进空中机动飞机的商业市场,探索高机动性空中作战飞行模式。2023年10月,日本经济产业省宣布将支持Skydrive用于下一代空中交通领域。2024年3月,英国政府交通运输部发布《未来飞行行动规划》,制定了详细的无人机和eVTOL航空器发展路线图。2024年5月,欧盟执委会批准了针对eVTOL的总体政策规定(EU2024/ 1111),由欧洲航空安全局(European union Aviation Safety Agency, EASA)具体实施。
我国2022年1月由交通运输部和科学技术部联合发布的《交通领域科技创新中长期发展规划纲要(2021—2035年)》指出部署飞行汽车研发,突破飞行器与汽车融合、飞行与地面行驶自由切换等技术。2024年11月,中央空管委宣布即将在合肥、杭州、深圳、苏州、成都和重庆等城市开展eVTOL试点,多地将发展低空经济写入政府工作报告中,一场eVTOL的技术和产业革命已经拉开序幕。
从资本方面看,企业界纷纷涌入,波音Boeing、空车Airbus等传统航空巨头,大众、吉利、小鹏等汽车企业,还有新兴eVTOL公司,其中包括美国的Joby Aviation、Archer Aviation、BETA Technologies等,英国的Vertical Aerospace,德国的Lilium和Volocopter,日本的SkyDrive,我国的亿航、沃飞、小鹏等,都已经相继研发生产了各自的机型,一些已经取得适航许可,图1所示为小鹏的飞行概念汽车HT Aero X3。

eVTOL推进系统在eVTOL产业链中成本占比将高达40%。以分布式推进eVTOL为例,推进电机通常分布在机翼或者机身上的多个螺旋桨上,构成推进系统为飞机提供推力。这种电机不仅要具有较高的功率密度和转矩密度(以下简称高密度),而且还要满足航空级电机的高安全性、高环境适应性和长寿命要求。
一般而言,EV只需要配备两个电机驱动系统(前驱和后驱),但在eVTOL上,根据其不同构型,如多旋翼、倾转旋翼、复合翼、涵道式等,至少需要8个推进电机,加之eVTOL为了满足高可靠性和长期运行安全性,其所选用的推进电机需要定期更换,这就使得eVTOL在全生命周期内,需要更多推进电机。可以预见,eVTOL推进电机有巨大的市场空间。
然而,作为eVTOL动力核心的电推进系统在特殊的工况需求下更加追求高密度、高效率、高可靠性,设计要求也更加苛刻,推进电机的性能指标是决定eVTOL性能的关键。如何设计适合eVTOL更加严苛的性能指标要求的推进电机,是进一步提升eVTOL性能并推进其全面普及化的关键。
为了满足高效和高密度需求,目前EV用驱动电机通常采用内置式永磁同步电机(Permanent Magnet Synchronous Machine, PMSM),如Lucid Air、Tesla、BYD等均选用了该种电机方案,转速甚至高达20000 r/min以上,同时配备具有耐高压耐高温特性的SiC控制器,绕组则选用扁线绕组。
但是与EV驱动电机运行工况不同,为了满足eVTOL爬升和巡航需求,电机运行工作点主要集中在低速大转矩区域,这就使得其不需要像EV驱动电机那样,具有较大的弱磁扩速区域。因此,目前可见的eVTOL推进电机方案多为表贴式永磁转子结构。此外,不同于EV驱动电机常采用的液冷方案,eVTOL推进电机更多采用集成式螺旋桨风冷结构,如Joby S4。
根据有限的eVTOL推进电机公开资料,目前其设计技术路线尚不明确,最终拓扑如何选取、电机新材料和新工艺如何应用、可靠性如何保证均有待进一步研究。
针对以上问题,国内外学者从eVTOL构型和应用场景出发,对eVTOL推进电机类型和结构进行初步探讨和分析,提出了适用于eVTOL的高密度电机拓扑、设计方法、集成螺旋桨一体式风冷结构、槽内直冷热管技术、高密度不等截面绕组。开发了基于高可靠设计的多相不对称绕组结构、模块化集成电机控制器结构(Integrated Modular Motor Drive, IMMD)以及多电机协同控制系统等。此外,还提出应用金属3D打印工艺、高频驱动SiC技术等,这些新材料新工艺都将助力eVTOL驱动电机性能的进一步提升。
总体而言,eVTOL推进电机的研究集合了诸多关键设计问题,如eVTOL推进电机新型拓扑结构研究、eVTOL推进电机高可靠设计方法研究、eVTOL推进电机新材料应用与损耗产生机理研究、eVTOL推进电机增材制造技术与先进制造工艺研究等。目前,对于该类电机的关键问题整体发展还未有全面的总结归纳,研究内容多与EV驱动和航空推进电机混淆,不能对eVTOL推进电机设计和研发工作者进行有效的指导和借鉴。
为此,本文将从eVTOL应用场景和构型出发,对比该类电机和EV电机的不同之处,并总结现有eVTOL推进电机相关技术和发展动态,结合目前eVTOL推进电机的关键设计问题,梳理该类电机的设计方法,并展望其未来发展方向。
1 EVTOL研究和发展现状
1.1 eVTOL构型分类
eVTOL按构型可分为多旋翼、复合翼、倾转旋翼和涵道式,四种方式各有优缺点。据民航新型智库及美国垂直飞行协会(VFS)发布的统计,全球目前有超过700个eVTOL设计研发项目,从构型分布上看,升力与巡航复合型有124款,多旋翼型有195款,倾转旋翼和倾转涵道等矢量推进型共有235款,部分典型eVTOL机型如图2所示。
其中多旋翼型通常采用三个以上的分布式驱动螺旋桨,推进装置仅提供垂直升力,水平力通过推力差实现,具有自重较轻、成本低、设计简单等优势,但能效较低、载荷少、航程有限、速度较低,如亿航EH216、小鹏X2、VoloCity和Skydrive SD-03均采用了该种结构。复合翼型在分布式推进基础上,增加向前推进的螺旋桨,航程和效率得以提升,但垂直升力系统在水平巡航阶段增加阻力,如BETA Alia250、City AirBus NextGen、Eve V3、亿航VT30。
倾转旋翼通过可变方向旋翼设计满足在起飞和巡航阶段不同驱动力需求,具有推力大的突出优势,但是由于增加了倾转装置,系统复杂度提升,总体能效降低,成本高、试飞难度大,如Vertical Aerospace VX4、Archer Midnight、Joby S4、沃飞AE200。涵道式由于增加了一道物理屏障,推力大,并有效降低气旋损耗和噪声,具有高能效和低噪声的优点,但是技术难度较大,如Lilium Jet,由于起飞功率大,对电池需求功率较大,易引起电池故障。

1.2 eVTOL载运参数
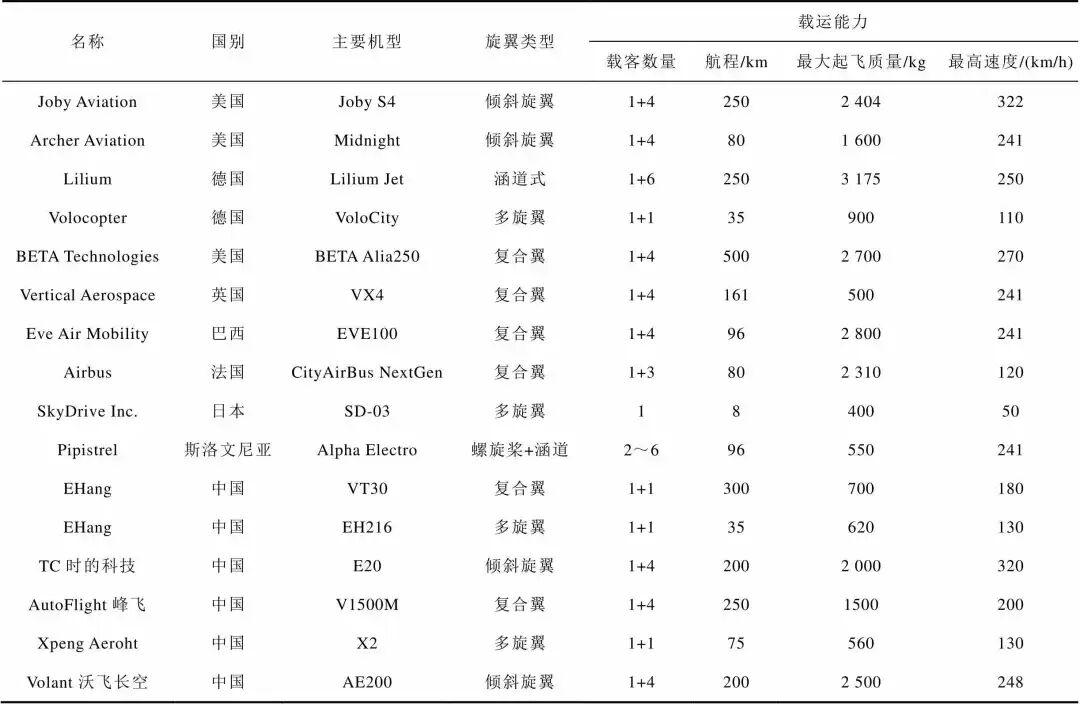
与EV相比,eVTOL通常采用分布式推进技术,以增加驱动系统可靠性,表1总结了目前国内外几款eVTOL的载运能力情况,可以发现,目前eVTOL载客能力多为1位飞行员和4位乘客这种乘载模式,类似于地面载客出租车构型。根据eVTOL类型可以看出复合翼、倾转旋翼和涵道式的eVTOL飞行速度更快、载客能力更强、续航里程更远。
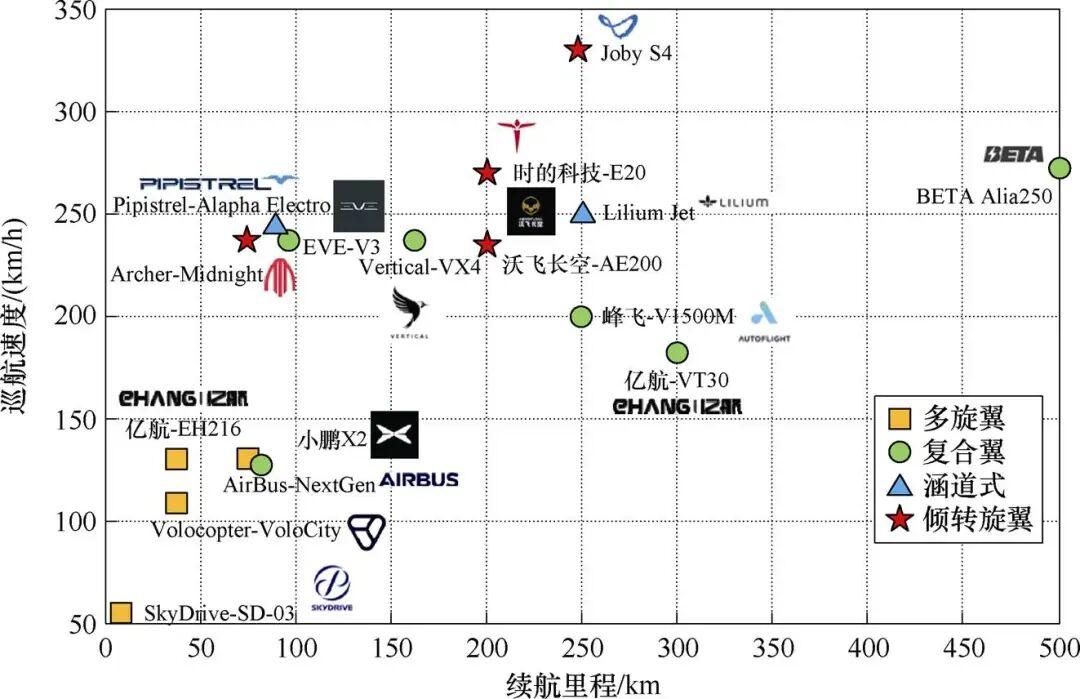
而多旋翼式的续航里程和巡航速度以及载客能力均相对较弱。不同型号eVTOL续航里程和巡航速度情况如图3所示,可以发现,现有eVTOL机型巡航速度和航程差别较大。其中性能参数更优的有美国Joby S4和BETA Alia250技术方案,我国目前eVTOL研发参数处在中上游水平,还有较大进步空间。
综合来看,eVTOL构型并未实现统一的技术路线,但如果采用大载重、高航速和长续航构型,则更加倾向于选择复合翼和倾转旋翼式构型,此外,涵道式和部分涵道式构型应用较少,只有德国Lilium Jet和斯洛文尼亚Alpha Electro采用该种构型,技术成熟度有待进一步验证。
1.3 eVTOL典型工况
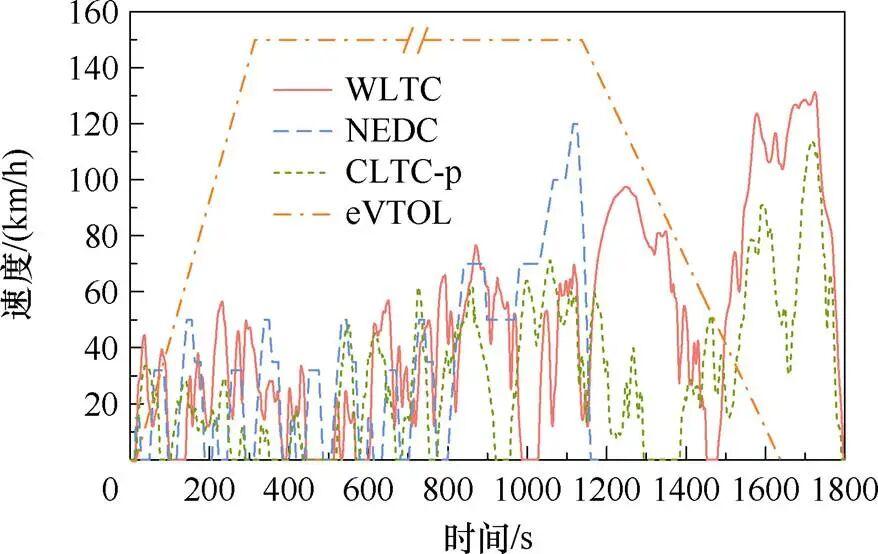
从工况角度看,EV的主要工作状态分为:爬坡、高速超车、怠速等,追求更加宽的调速和变矩范围,不同于EV典型工况,如新欧洲工况(New European Driving Cycle, NEDC)、全球统一轻型车辆工况(Worldwide harmonized Light vehicles Test Cycle, WLTC)、中国城市道路交通工况(China Light-duty vehicle Test Cycle, CLTC)等,如图4所示。eVTOL运行工况根据工作状态分为:垂直起降、爬升和巡航三种状态,据此绘制eVTOL的典型工况如图4中虚线所示。
根据文献描述,EV和eVTOL的典型工况工作点分布情况如图5a和图5b所示,可以看出,EV驱动电机工作点广泛分布在低速大转矩、中低速小转矩和高速小转矩三个典型区域内,如图5a所示,转矩和转速变化范围较大,这也是为了满足EV的爬坡、城市反复起停以及高速超车等工况需求。
而eVTOL推进电机的工作点则主要分布在低速大转矩区域,如图5b所示,这主要是为了满足在eVTOL垂直起降阶段会有突发电力需求,因此推进电机需要满足一定的过载能力,当然短时过载也可能导致电池瞬时承受较大过载,引起电驱动系统可靠性问题,美国能源部橡树岭国家实验室对此进行了评估研究,这一方面在涵道式eVTOL中体现更加明显。
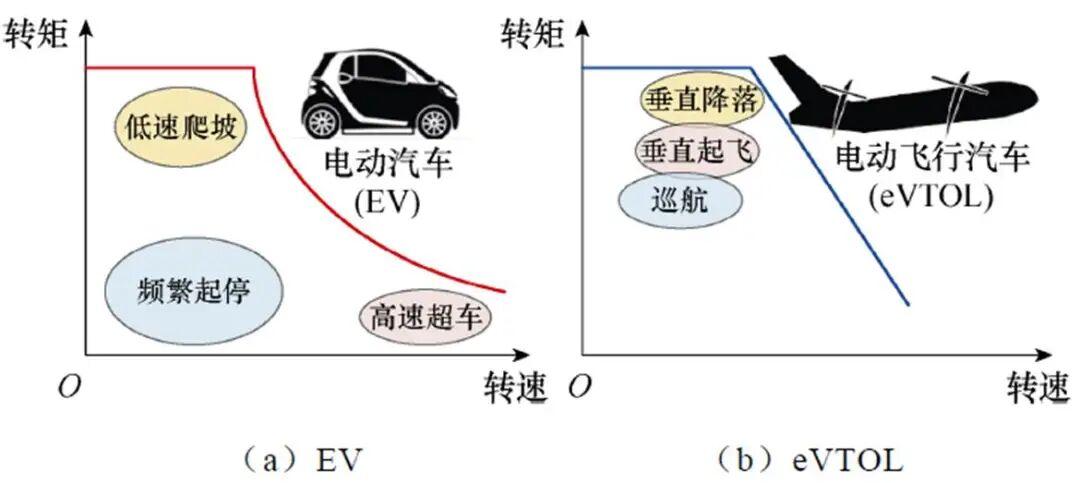
综上所述,从电机设计角度看,eVTOL推进电机追求低速大转矩和一定的过载性能,通常为3倍以上的额定转矩,具体取决于设计需求。而EV驱动电机则需同时满足全工况综合性能最优,过载倍数通常为2~3。总体看来,eVTOL推进电机的工作范围变化并不大,不像EV驱动电机那样追求宽广的弱磁调速范围,转速也更低,因此,可以采用结构上更加简单的表贴式永磁转子结构。
此外,从冷却方式上看,日本DENSO公司指出EV驱动电机通常采用液冷方案,如目前一些高端车上所采用的Hairpin绕组油冷技术,而eVTOL推进电机多采用散热翅片冷却方式进行冷却,结合螺旋桨流体动力学特点设计电机集成式风冷结构。eVTOL推进电机的主要拓扑结构和设计特点将在第2节和第3节进行详细综述。
2 EVTOL推进电机应用现状与结构特点
推进电机作为eVTOL推进系统的核心动力单元,其性能直接决定eVTOL性能,相比于EV驱动电机,eVTOL推进电机在安全性、轻量化、高效率和高密度设计方面具有更高要求。因此,如何提升推进电机的功率/转矩密度和可靠性成为eVTOL推进电机的关键设计问题。下面将围绕目前产业界和学术界出现的主要型号eVTOL的推进电机结构特点进行分析和综述。
2.1 现有eVTOL推进电机的研究和应用现状
德国Lilium Jet涵道式eVTOL由36台电动机提供动力,其中两个前鸭翼各有6个电动机,每个后翼有12个电动机。由DENSO公司和Honeywell公司共同开发,推进电机为一台24槽永磁同步电机,如图6所示,质量约4 kg,输出功率为100 kW,连续功率密度可达25 kW/kg。由图6中可以看出,定子绕组端部采用了灌封工艺,可有效增强散热。

美国H3X公司推出了电动机、逆变器和齿轮集成设计的HPDM-250高功率密度电动机,如图7所示。可用于高功率密度驱动场合,其峰值转矩可达802 N·m,峰值功率为250 kW,质量仅为18.7 kg,系统效率达95.4%,可以在13 kW/kg功率密度下连续工作,在多个领域实现创新性设计,包括电磁优化、3D打印冷却系统和绕组、容错设计、SiC控制技术等。

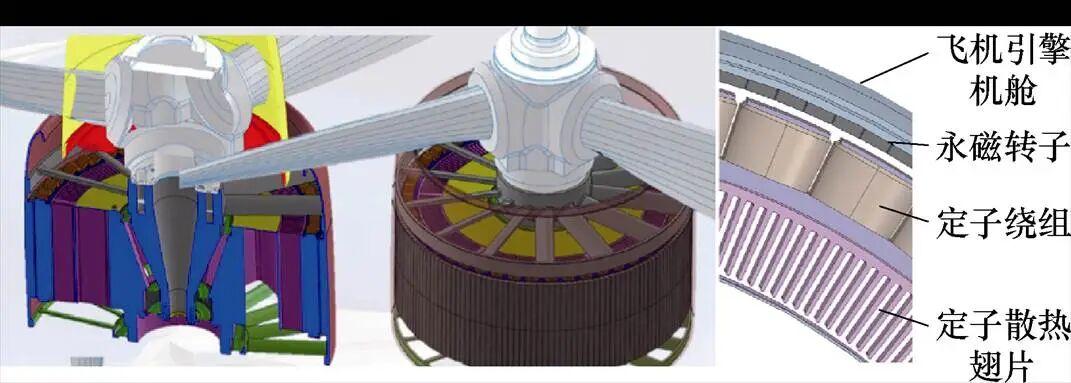
法国Airbus公司研发了City Airbus NextGen,采用MAGicALL的电机],如图8所示。推进电机功率接近200 kW,采用大直径、内转子、直驱式PMSM方案,悬停时的电机转速小于1 000 r/min,为了能够输出100 kW甚至更高功率,对应的转矩不低于950 N·m,定子外机壳上增加了散热翅片,增强了电机的散热能力。通过集成电机和控制器设计,电驱动系统转矩密度高达50 N·m/kg,效率大于95%。

英国Vertical Aerospace公司研发了一款单人eVTOL,并成功试飞,其采用的推进电机EMRAX268为一款径向外转子PMSM电机,如图9所示。峰值功率可达117 kW,功率密度为5.24 kW/kg。2023年7月,又研发了下一代eVTOL原型机VX4,整个电驱动单元(Electric Propulsion Unit, EPU)全部由英国Equipmake公司自主设计、研发和生产,包含高功率密度电机、高性能逆变器。其电机仍旧为内转子结构,采用Halbach永磁结构以提升电机转矩密度。

由NASA主导研制X-57 Maxwell,根据设计需求,采用分布式电力推进技术,如图10所示为该款机型所用的推进电机结构示意图。电机为一台最大功率60 kW的外转子PMSM,用于代替发动机,内部定子铁心嵌入散热翅片增强电机散热,巡航功率可达42~45 kW。
美国Joby S4电推进系统采用直驱方案,螺旋桨工作转速要求非常低。因此,Joby S4螺旋桨的悬停转速仅为800 r/min左右,巡航时的转速更是只有250 r/min,起飞质量可达2400 kg,电机的峰值功率为236 kW,峰值转矩高达1800 N·m,转矩密度为49 N·m/kg,其推进电机为一台外转子PMSM,电机直径约为400 mm,如图11所示,Joby S4的推进电机定子铁心采用了1J22软磁合金,集中式绕组间预留风冷通道,转子采用Halbach结构。Joby S4的电机峰值功率密度可达8.4 kW/kg,为了提高电驱动系统的可靠性,还采用了双逆变器结构。
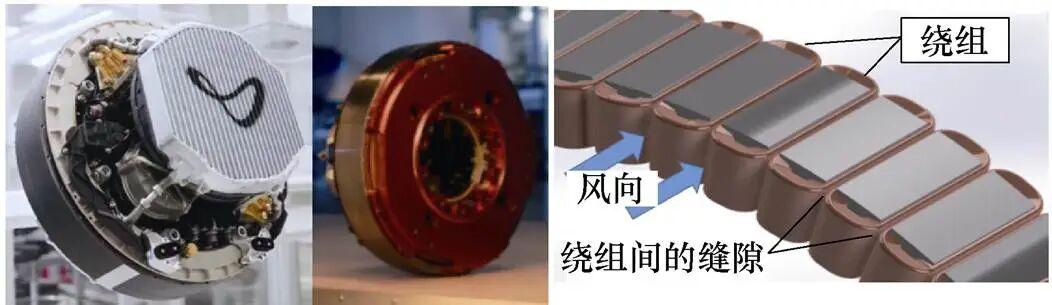
此外,Joby公司还申请了带有通风道的3D打印转子结构相关专利,如图12所示。电机的外转子以及电机内部设计有多路风道,电机下方有一个轴流式散热风扇。在风扇和来流空气的作用下,可以实现对电机的散热,控制器、散热片等其他附属部件内嵌在转子内空腔位置。
直驱型eVTOL推进电机转速低、转矩大,但电机体积也较大,电机成本较高。不同于Joby公司采用的直驱式技术路线,另外一家eVTOL公司美国Archer则采用了电机+减速器的半直驱技术路线,来获得低转速大转矩的动力输出,2022年,Archer公司宣布为美国联合航空生产空中出租车Midnight。所设计的推进电机峰值功率125 kW,采用了扁线定子绕组、Halbach内转子PMSM半直驱设计方案,总质量为25 kg。
由于整机采用倾转旋翼结构,倾转电机和升力电机采用两种不同的规格型号,可以复用95%的部件。如图13所示为Archer的eVTOL推进电机与Tesla的EV驱动电机对比情况,根据Archer公布的数据,其电机峰值功率密度为5 kW/kg,但缺点是机械结构相对复杂,系统效率降低。
此外,为了增加电推进系统可靠性,防止电机失效引起事故,Archer还采用多绕组和多逆变器设计方案。相比于Tesla Model3的EV驱动电机,该款eVTOL推进电机实现了较大的性能提升。

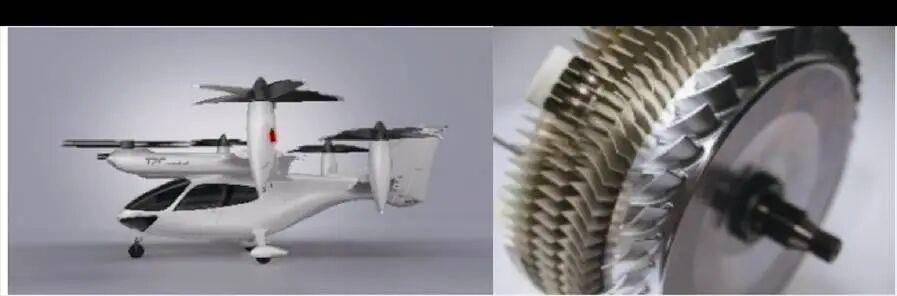
中国时的科技(TCab Tech)研发的E20载人eVTOL及其推进电机如图14所示,该款型号为ENGINeUS 100的推进电机,集成了控制器和空冷系统,在起飞阶段可以提供超过100 kW的输出功率。E20采用6轴4倾转布局,构型以及最大起飞质量均和Joby S4接近。其电推进系统包括电机和冷却系统在内的功率密度高于10 kW/kg,转矩密度大于15 N·m/kg(仅电机有效质量),电机转速为2 500 r/min,采用DC 540 V电压等级供电。
国内另一家eVTOL公司沃飞长空,设计研发的AE200倾转旋翼式eVTOL已经完成了全流程转换飞行。预计2026年完成型号合格证取证,加速产品落地。AE200采用4倾转旋翼设计,如图15所示,AE200倾转动力推进电机采用外转子PMSM直驱电机方案。

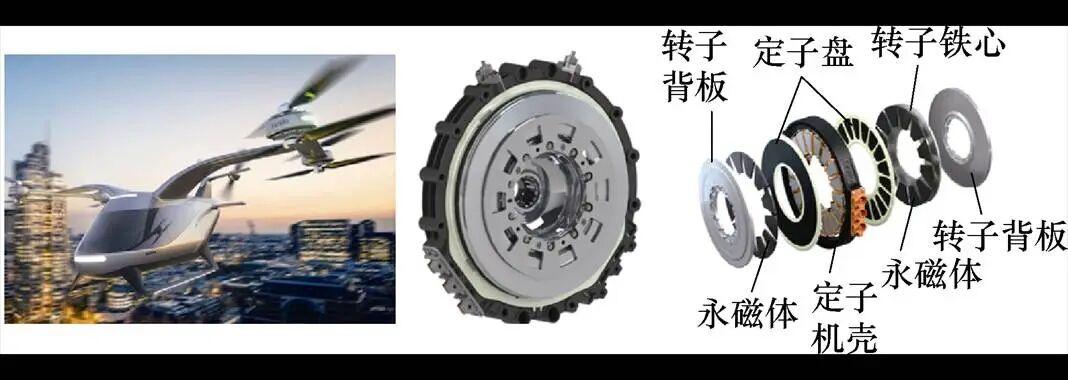
英国Evolito公司提出如图16所示的eVTOL构型,采用双转子轴向磁通PMSM推进电机,该电机定子为无轭、槽内直冷结构设计。Evolito电机涵盖从峰值功率密度为28 kW/kg的低转矩型号D250和峰值功率密度为12 kW/kg的中转矩型号D500,以及轴向级联的Evolito D1500,可增加至高达1 MW的输出功率,并经过了超过1000 h的飞行测试。这个概念与H3X提出的HPDM 1500方案类似,只是H3X公司采用的是径向磁通电机方案。
值得注意的是,以上公开可见的eVTOL推进电机普遍采用了PMSM,然而,英国Magnomatics公司设计了一款轻型风冷磁齿轮(Magnetic Gear, MG)推进电机,如图17所示,最大功率可达86 kW,最大转矩为465 N·m,最大转矩密度可达31.8 N·m/kg,连续工作转矩密度也能达到19.2 N·m/kg。其优异的性能指标使得NASA已确定磁性齿轮是电动飞机的一项潜在技术,并认为磁齿轮和永磁电机的同心组合将是eVTOL的理想选择。华中科技大学研究也发现该类磁场调制电机可有效提高电机转矩密度。因此,MG电机应用于eVTOL场合具有一定的可行性,但有待进一步验证和深入研究。
2.2 eVTOL推进电机结构特点总结与对比分析
eVTOL用推进电机参数情况见表2,将其与EV驱动电机参数进行对比,可以发现eVTOL推进电机转速大多为几千转每分钟,远小于EV驱动电机的最高转速,根据不同的工况需求,目前eVTOL推进电机功率等级相差较大,而EV驱动电机在纯电动场合功率均达到了100 kW以上,甚至200 kW以上,只有一些混动场合中驱动电机功率等级较小,如Prius2017驱动电机峰值功率仅为53 kW。
从结构上来看,目前对于eVTOL推进电机来说,现阶段很难统一技术路线,既有外转子也有内转子、有直驱也有半直驱、有径向磁通也有轴向磁通、有永磁同步电机也有磁齿轮电机,拓扑结构技术路线更趋多样化。
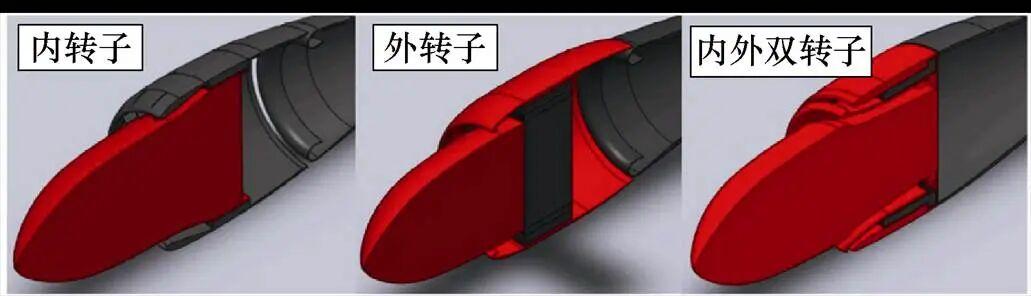
从电机定转子结构上看,主要分为内转子、外转子和内外双转子三种结构,如图18所示。其中,外转子电机具有更大的转动惯量,同样外径大小的电机,气隙直径也更大,所以相比于内转子电机而言,更能产生较大转矩。而内转子电机高速时效率较高,通常与减速器配合用于半直驱场合。
此外,对于转速较低的直驱式电机,由于电机内腔空间较大,可以再增加一套定转子,形成双气隙结构,进一步增加电机输出转矩,这种拓扑在其他领域已有应用,如船舶推进、电动汽车、风力发电等。
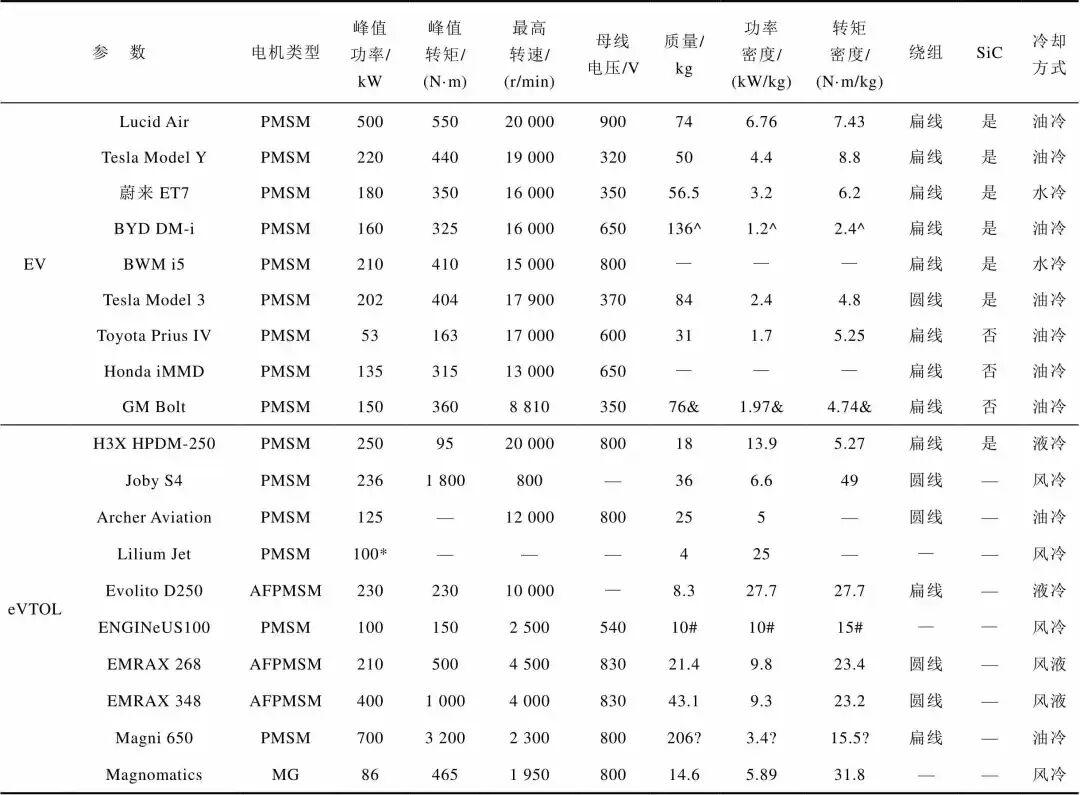
注:PMSM代表永磁同步电机,AFPMSM代表轴向磁通永磁同步电机,MG代表磁齿轮电机,*代表额定值,^代表电机+控制器,&代表电机+齿轮箱,#代表电机+冷却系统,?代表电机+控制器+电缆。
从冷却方式上看,EV驱动电机通常采用液冷,如油冷和水冷,而eVTOL推进电机则较多采用空冷。这与电机的工作环境密切相关,如部分高端车型采用变速器润滑油为电机绕组(尤其是扁线绕组)进行端部冷却,或者转子冷却,而eVTOL巡航过程中,由于螺旋桨产生的尾翼气流会在电机表面形成流体通道,电机恰好可以利用这样的空气进行冷却。因此,eVTOL推进电机更多采用定子散热翅片结构。
如2.1节所述的NASA主导研制的X-57 Maxwell、Joby S4和City Airbus NextGen等。但目前随着电机功率/转矩密度需求越来越高,槽内直接冷却技术也被提出和应用,它具有更高的冷却效率,将在第3节详细介绍。
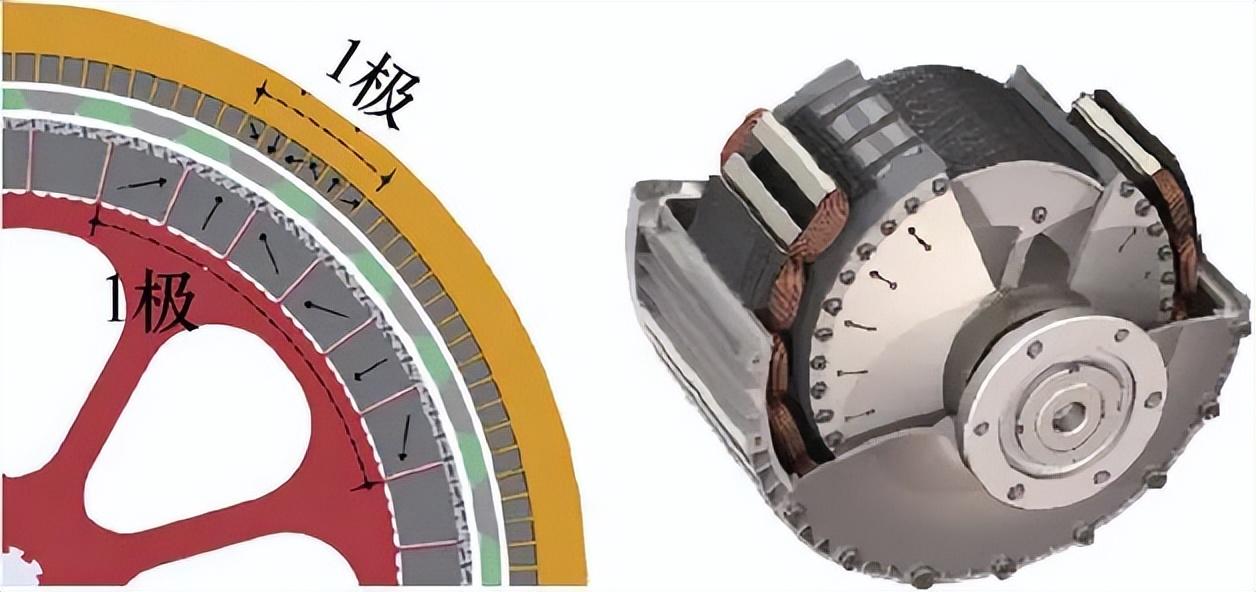
目前,EV驱动电机技术方案已经趋向统一,主流技术方案是扁线绕组永磁电机,为了抑制谐波降低振动噪声,极槽方案多选择8极48槽或6极54槽等分布式绕组结构。而eVTOL推进电机多采用多极少槽的分数槽集中绕组结构,两者的差距根本原因在于EV驱动电机需要满足高速设计目标,而eVTOL推进电机转速较低,通常选择低速大转矩直驱方案,电机极数较多。受限于电机外径尺寸,定子采用少槽的集中式绕组结构,端部可以更短。
综上所述,eVTOL推进电机的设计目前并不能完全照搬其他领域电机,如电动汽车驱动电机的设计方案,如何根据eVTOL的工况特点,设计该类推进电机的电磁拓扑、提升效率和功率/转矩密度、提高可靠性已成为eVTOL推进电机的关键设计问题。下面将重点围绕eVTOL推进电机的新拓扑、新方法、新材料和新工艺进行综述。
3 EVTOL推进电机的关键设计问题
2022年IEEE交通电气化期刊特别围绕航空电气化eVTOL电推进系统设计主题开设专刊,重点针对eVTOL推进电机的高效率、高密度和高可靠设计需求,探讨提高eVTOL推进电机性能和可靠性的方法。不同于EV驱动电机设计,eVTOL推进电机的负载为螺旋桨,因此需要从不同负载角度分析eVTOL推进电机的设计方法。
3.1 eVTOL推进电机设计参数确定
不同于EV驱动电机的轮式负载,eVTOL推进电机的负载是螺旋桨,电机驱动螺旋桨的转速n并不等于eVTOL的行进速度V0,两者之间满足式(1)关系,称为螺旋桨的进速比Jp。
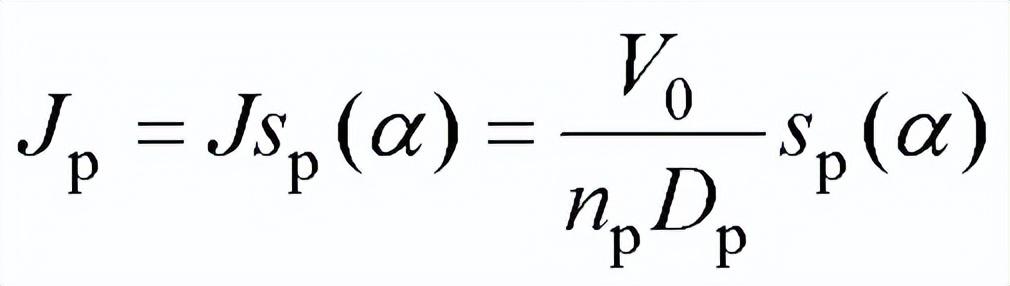
式中,J为α=0时的螺旋桨的进速比;V0为飞机的行进速度;np为螺旋桨转速;Dp为螺旋桨的直径;sp(α)为螺旋桨的角灵敏度,与螺旋桨的结构和叶面与风速夹角α有关。
eVTOL向前飞行过程中,螺旋桨在空气的作用下产生升力L和阻力D,升力垂直叶片向上,阻力与升力正交超前升力90°,如图19所示,图中ω为螺旋桨旋转角速度,最后升力阻力分别沿水平和垂直方向投影,即可得到eVTOL螺旋桨叶片的推力和扭转力,扭转力产生的转矩与驱动电机转矩相平衡,从而实现eVTOL向前推进。
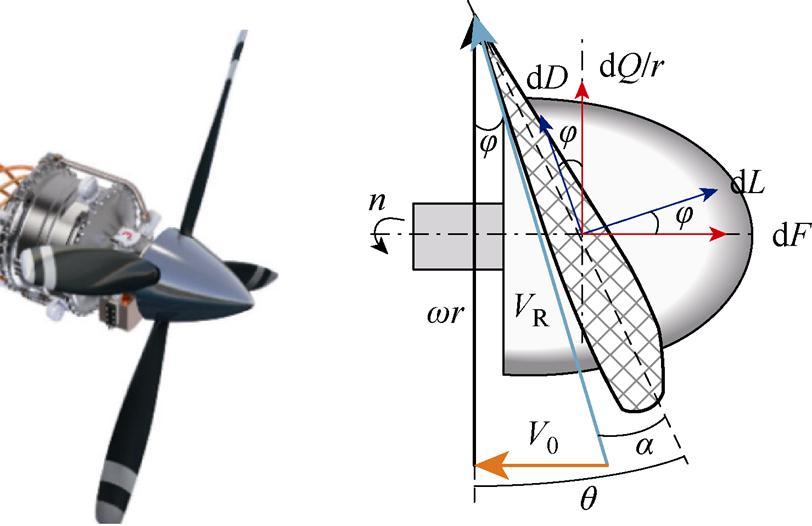
其中,叶片单元的推力微分dF和扭转力微分dQ/r分别可通过受力分析获得,有

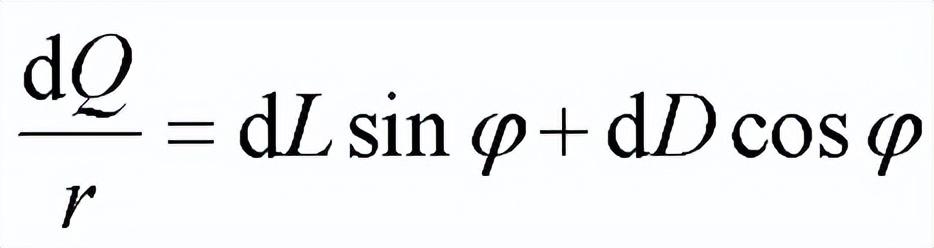
式中,φ为合成空气流速与叶片旋转切面夹角;r为叶片单元旋转半径;dL和dD分别为升力微分和阻力微分,有
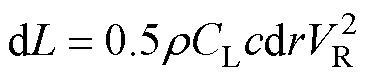

式中,ρ为空气密度;VR为合成空气流速;c为叶片单元弦长;CL和CD分别为升力系数和阻力系数。
通过对螺旋桨叶片受力积分可得叶片推力和转矩为
式中,CF和CQ分别为螺旋桨的推力系数和转矩系数,与Jp有关。
此时,电机输出转矩和螺旋桨负载转矩之间的关系为

式中,Jω为螺旋桨的转动惯量;Bω为电机黏度系数;Tc为电机摩擦转矩。
由此,根据eVTOL的工况参数即可得到推进电机的需求转矩和转速工作点。
3.2 高功率/转矩密度设计
eVTOL推进电机追求高功率密度和转矩密度,从电机设计角度看,功率密度与转矩密度和电机设计参数的关系为
式中,Pmotor为电机功率;Di为气隙直径;Lef为电机轴向长度;n为电机转速;A和Bδ分别为电机电负荷和磁负荷。
通过式(9)、式(10)可以看出,提高电机功率/转矩密度的主要方法包括:提升增加转速n、提高电、磁负荷A和Bδ,但是n增加意味着电机电流和磁场交变频率增加。而A增加代表电机绕组电流增加,绕组铜耗增加。Bδ增加代表电机磁场增强,磁通密度值增加,铁心损耗增加,这些都会导致电机温升增加,因此,必须加强冷却,保证电机温升在容许范围内。目前,针对eVTOL推进电机的功率/转矩密度提升已有相关共性研究开展,主要围绕高密度绕组设计、聚磁结构转子设计、新型冷却结构设计等方面。
(1)从增加电负荷A方面,目前在EV驱动电机场合,多采用槽满率更高的扁线绕组,相比于传统圆线绕组,其直流电阻更低、散热更好,同时可以实现自动化下线,易保证批量化产品的一致性。
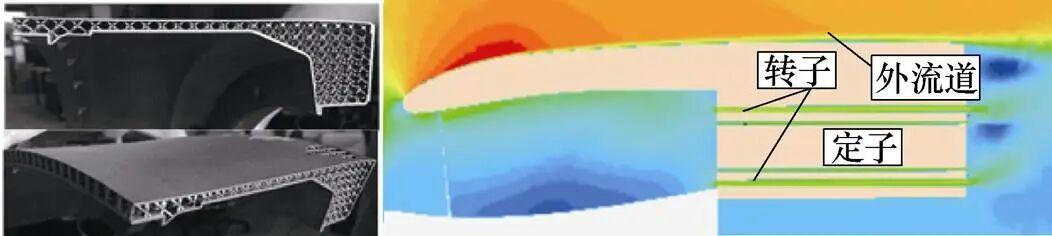
近年来,也出现了基于3D打印技术的高槽满率绕组技术,如图20所示为美国Kentucky大学研制的3D打印绕组。该类绕组采用不等截面结构,充分将铜导体填满槽内空间,同时抑制了绕组高频交流损耗。此外,采用超导技术和超级铜线等新导电材料,也可以降低绕组损耗,提升电机效率和功率密度。但目前超导技术需要附加制冷设备,占用额外空间,所以暂不适用于eVTOL推进电机场合。超级铜线虽然理论上可以实现100倍现有铜绕组的电导率,但目前仅在样机测试阶段,实际绕组导线远未达到这样的指标。

(2)从增加磁负荷Bδ方面,有研究提出采用新型聚磁转子结构,如Halbach转子,如图21所示。
有文献提出非对称聚磁转子提高电机磁阻转矩,可有效增加电机的转矩密度。目前,eVTOL推进电机的运行工况主要集中在低速大转矩区域,不必追求较大的弱磁调速范围,因此多数都采用表贴式转子结构,磁阻转矩分量很小。但是对于半直驱式eVTOL可能采用的内置式永磁同步电机,其转子拓扑可以参考此类聚磁式结构,从而提高磁阻转矩占比,增加转矩密度。
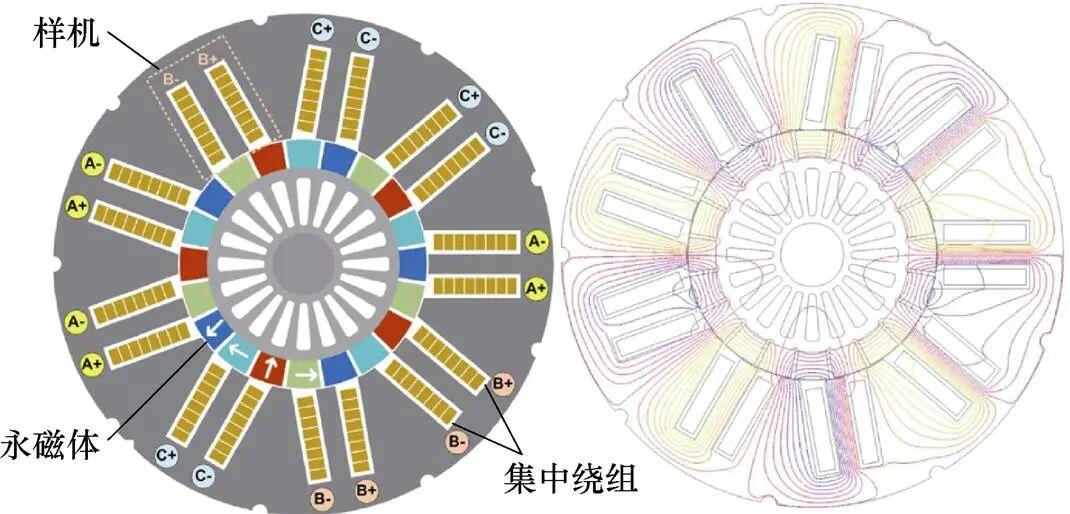
此外,从定转子铁心材料方面,目前出现了一些新型高饱和磁通密度铁心材料,如日本Kustcore Technologies量产的可冲压的高饱和磁通密度、低铁损铁心软磁材料HLMET®,用于轴向电机定子的晶粒取向钢和软磁复合材料。软磁复合材料的生产工艺简单,较适用于轴向磁通电机,磁导率更高,饱和磁通密度可达1.9 T,甚至更高,如图22所示为Motres电机的有取向硅钢材料制造的定子和转子铁心及它们的磁通密度分布情况。该电机转子采用聚磁结构,有效提高了电机内磁负荷。

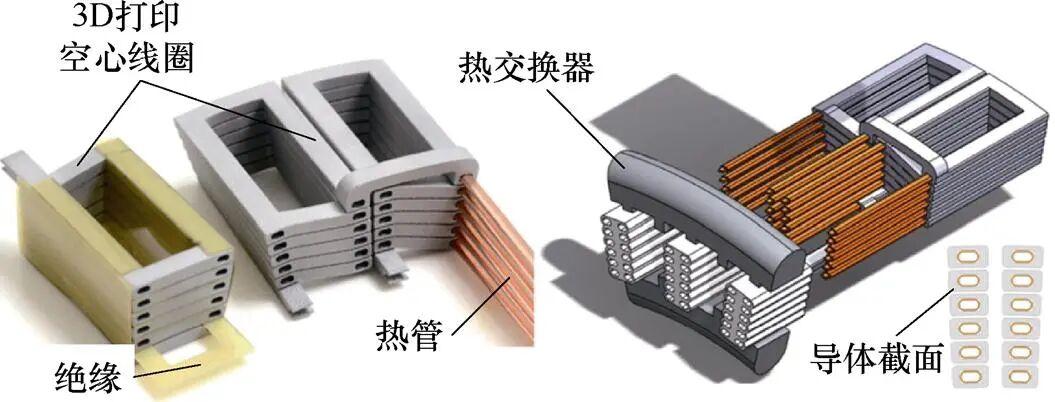
(3)从加强冷却设计角度看,目前eVTOL多数采用散热翅片冷却,这也是大多数装机应用的eVTOL推进电机所采用的主要冷却方案。但为了进一步提高功率/转矩密度,有学者提出绕组直冷结构,如美国Marquette大学提出一种基于增材制造技术的槽内绕组直接冷却技术,采用中空导体内置热管技术实现绕组的高效冷却,如图23所示,电机最高功率密度可达20 kW/kg以上,证明了这种绕组直冷方案的优越性。
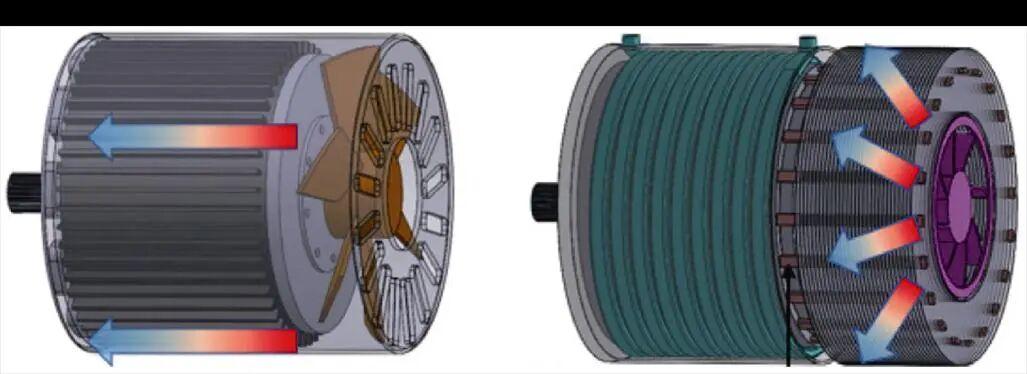
此外,由于引入液冷势必会增加电机结构的复杂性,增加系统质量和体积的同时,还容易引起可靠性问题,不利于eVTOL电推进系统的安全设计,有学者提出基于冷却热管技术的外转子永磁同步电机用于电动飞机推进电机中,如图24所示为美国Clemson大学提出的基于槽内热管和机壳水冷的复合式冷却结构。
目前,高密度推进电机涉及散热翅片风冷、槽内液冷和热管冷却技术等,随着3D打印技术不断成熟,绕组一体式冷却结构制造成为可能。如何结合先进冷却技术提高电机电磁负荷是eVTOL推进电机进行高功率/转矩密度设计需要考虑的问题之一,此外,在eVTOL推进电机的设计过程中,需要充分考虑eVTOL电驱动系统构型及其运行工况。
3.3 高可靠设计
除了满足高效和高密度设计指标外,eVTOL推进电机更加关注的另一个技术指标就是高可靠性,eVTOL要求其推进系统的灾难性故障率低于每飞行小时10-9次。电机和驱动系统已被确定为限制推进系统可靠性提升的主要因素,因为其故障率范围为10-6~10-5次/h。而电机中约30%以上的故障都是由于绝缘损坏引起的。
一方面,eVTOL推进电机通过变频器供电,电机绝缘会受到高频PWM脉冲电压的反复冲击作用,匝间绝缘电压应力水平增加。而且随着电机功率/转矩密度需求不断提高,电机电磁负荷增大,造成槽内易出现局部热点,电-热应力耦合作用下,绕组绝缘可靠性面临挑战。
针对该问题,关键在于准确预测绕组中局部最大电热应力发生位置并进行有效的靶向抑制。为此,有学者提出了电机绕组匝间电压应力计算模型、高精度电机热网络计算模型等,可以实现对于匝间电压应力和局部热点的准确预测。有文献通过优化绕组换位结构实现对匝间电压应力的抑制,可以在几乎不增加成本的情况下提高电机可靠性,具有较高性价比。
另一方面,在更高海拔空域或极端天气环境下,如高空低气压、高湿度等,eVTOL推进电机的绕组匝间绝缘初始放电电压(Partial Discharge Inception Voltage, PDIV)会随着工作环境的气压、温度和湿度的增加而下降,从而导致绝缘发生早期局部放电,引起绝缘损坏甚至失效。对此,有文献等从建模和实验角度提出了考虑环境因素的绕组初始放电计算模型和初始放电检测方法,为进一步开展电机可靠性研究提供了借鉴,图25所示为基于电-热应力耦合作用下的绕组初始放电判定方法,为在电机设计阶段实现绕组可靠性评估和设计提供了有效手段。
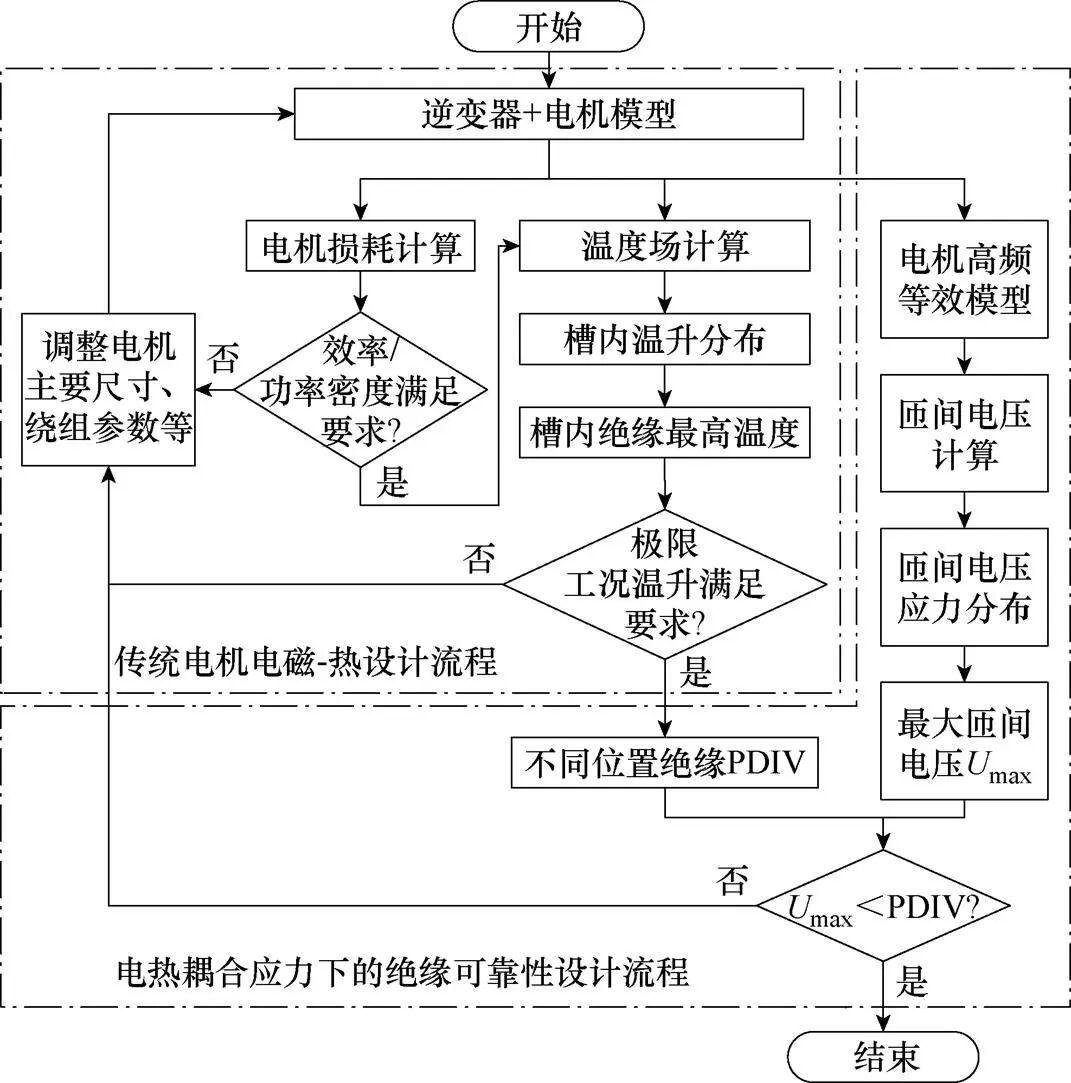
综合来看,从eVTOL推进电机电-热应力抑制和提升PDIV角度提高绕组绝缘可靠性的措施主要有:①绕组换位实现匝间电压应力抑制;②增强槽内散热,如槽内直冷、热管等;③采用更好性能的绝缘材料,如PEEK绝缘、复合绝缘等。eVTOL在高空低气压、恶劣环境及复杂电-热应力下运行时,其绝缘系统面临多重挑战,需从材料、设计、测试等多维度进行可靠性优化。
此外,如何实现电机的高冗余设计,避免电机系统发生故障造成安全事故是其面临的又一关键设计问题。从产业界来看,Joby S4和Archer Midnight均采用了双驱动系统或多逆变器方案,使得在一个系统故障时,启动另一套系统保障动力持续平稳输出。
从学术界看,韩国汉阳大学提出一种eVTOL用双定子双三相绕组永磁电机,如图26所示,通过独立控制双三相绕组,增加了电机运行的可靠性。当一套绕组发生短路故障时,可以切换到单套绕组运行模型,保证电机仍然具有转矩输出能力。

美国Wisconsin-Madison大学提出一种用于四旋翼飞行器上的集成式模块化驱动设计IMMD的电驱动系统方案,如图27所示。定子采用模块化设计概念,消除模块间的电、磁和热耦合作用,增强容错能力,控制器驱动模块与绕组端部紧密结合,结构上十分紧凑,转子采用Halbach磁极结构,使得电机进一步实现轻量化设计。

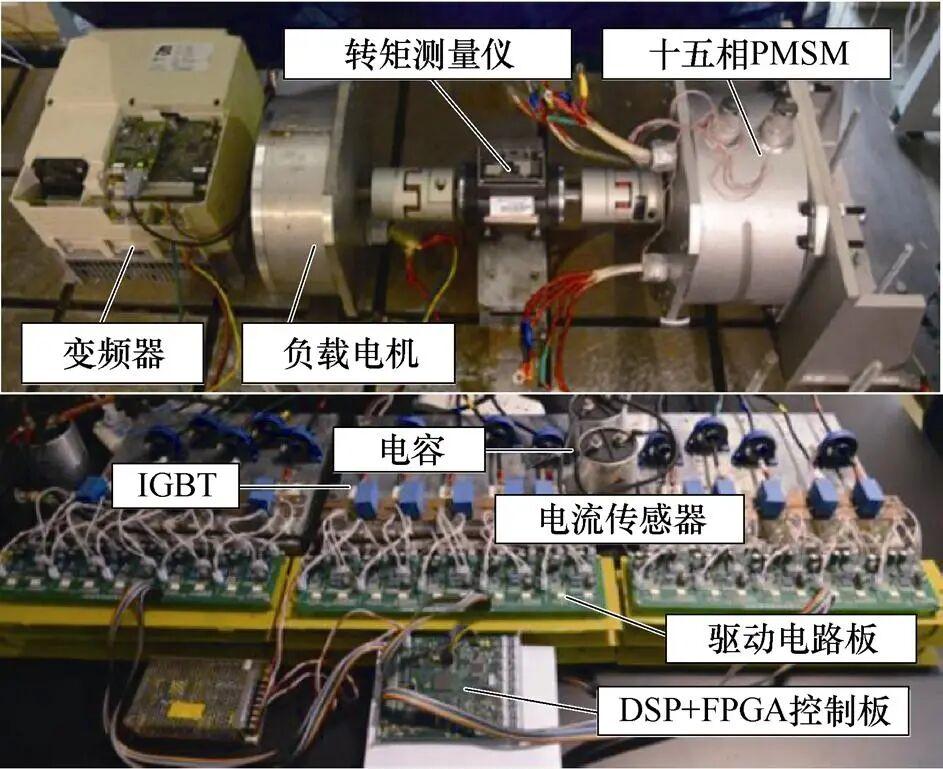
哈尔滨工业大学提出了用于全电飞机用十五相不对称绕组模块化永磁同步电机及其控制系统,如图28所示,可等效为3个五相或5个三相电机,这样即使有某相绕组发生短路或断路故障,仍然可以通过容错控制保证电机输出稳定转矩。
此外,由于eVTOL通常由多台推进电机驱动螺旋桨,其动力输出是由多台电机输出转矩共同作用产生。因此,多电机协同控制技术也是保证eVTOL电推进系统安全平稳运行的关键,当一台或多台电机发生故障时,如何保证所有推进电机协同输出转矩,保证电机螺旋桨依然可以为eVTOL提供有效动力输出。对此,有学者提出了电动飞机螺旋桨多电机协同控制方法和螺旋桨推进电机抗扰控制技术。
综上所述,从提高eVTOL推进系统可靠性的角度看,可以从电机本体设计出发,如增加绕组相数、模块化设计等方法实现绕组短路或断路故障容错,但同时也需要在控制硬件方面配合电机本体结构的改变。此外,通过推进电机分布式协同控制以及螺旋桨的抗扰控制等,也可以在控制策略和方法层面提高eVTOL运行的可靠性。
3.4 低振噪设计
在追求更高性能和保证可靠性的同时,eVTOL推进电机和EV驱动电机一样,还要满足更好的NVH性能,以提高乘客的乘坐舒适度,避免城市交通的噪声污染,这也是推进eVTOL市场化普及的重要一环。因此,如何进行低振噪设计是eVTOL推进电机的又一关键设计问题。
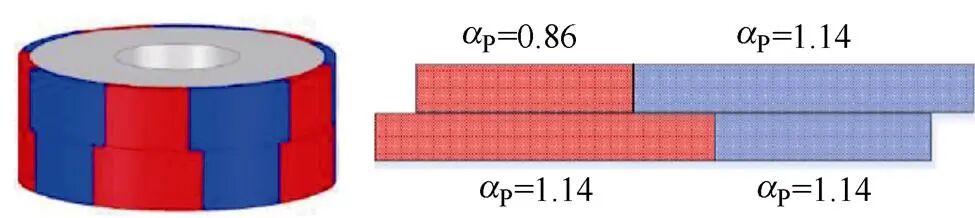
目前,针对EV驱动电机的低振噪设计方法有很多,如转子磁桥优化设计、斜槽或斜极设计等。eVTOL推进电机可借鉴已有EV驱动电机低振噪设计方案,如从磁极结构优化角度使得气隙磁通密度波形更加正弦,或通过绕组或磁极设计削弱空间谐波也可以降低振噪水平。如有文献提出一种分段错开不等宽永磁磁极结构,如图29所示,在保持电机转矩密度不变的情况下,显著降低了电磁振动。图中,αP为极弧系数。
此外,EV驱动电机通常选择整数槽分布绕组,并通过短距形式,抑制绕组空间磁动势谐波。然而,eVTOL推进电机,尤其是直驱式方案,电机通常采用多极少槽的分数槽集中绕组,该类电机中具有丰富的电枢绕组磁动势谐波,因此如何选择极槽方案,对该类电机的影响较大。
一般而言,以三相绕组电机为例,每极每相槽数为0.4时的绕组极槽配合方案,当采用集中式绕组方案时,绕组节距为1(等于5/6倍极距),因此,可以有效抑制5次和7次空间谐波,如12槽10极、24槽20极等。此外,研究证明,相比于圆线绕组电机,扁线绕组电机因为可以提高电机振动模态,具有低振噪特点。除了从本体方面进行降低振噪设计外,目前还有很多控制方法可以实现电推进系统的低振噪设计,包括谐波注入方法、扩频调制技术等抑制高频开关频率和倍频处噪声,有效降低电推进系统噪声水平。
4 总结与展望
本文详细综述了eVTOL推进电机的发展现状和相关研究进展,从eVTOL构型分类、载运参数和典型工况出发,围绕eVTOL推进电机的现有产品技术特点展开分析和讨论,进一步从eVTOL推进电机参数确定和设计方法、高功率/转矩密度、高可靠和低振噪四方面关键设计问题综述现有研究进展,总体来看主要包含以下几点:
1)eVTOL构型并未形成统一技术路线,但如果要求大载重、高航速和长续航,则更加倾向于选择复合翼和倾转旋翼式eVTOL,从电机设计角度看,EV驱动电机负载为轮式负载,eVTOL推进电机负载为螺旋桨负载。eVTOL推进电机更追求低速大转矩性能和过载性能。定子多采用分数槽集中绕组结构,转子较多采用表贴式或Halbach聚磁式永磁转子结构。但目前随着推进电机高功率/转矩密度和轻量化设计需求不断加剧,eVTOL推进电机新型拓扑结构有待进一步研究,此外,结合eVTOL螺旋桨负载工况条件的推进电机设计方法亟待明确。
2)eVTOL推进电机电磁负荷较大,采用高导磁率新型铁心材料,高密度3D打印绕组新工艺等有望助力eVTOL推进电机功率/转矩密度的进一步提升。此外,受工作环境限制,不同于EV驱动电机的液冷方式,eVTOL推进电机通常配合机壳散热翅片风冷和槽内热管冷却技术进行冷却。因此,eVTOL推进电机在新材料新工艺应用与损耗产生机理方面有待进一步研究,设计具有更高散热效率的冷却方案也是进一步提高eVTOL推进电机功率/转矩密度的重要途径,有待深入研究。
3)eVTOL推进电机可靠性和舒适性要求更高,从本体设计角度看,多相绕组技术、模块化和分布式驱动技术可以提高电机运行可靠性。然而,随着电压等级提高,SiC等高频高压器件的应用,电机绕组可能受到更大电压应力作用。加之槽内局部热点的存在,电机绕组局部存在高电-热应力耦合作用,容易在早期发生局部放电。如何通过绕组绝缘加强设计、电机多绕组设计等方式避免故障发生是eVTOL推进电机的设计关键。通过采用扁线绕组、斜极斜槽、转子优化设计和谐波注入技术等有望降低电推进系统振噪水平。此外,多电机分布式协同控制、螺旋桨推进电机系统抗扰控制等也是保证eVTOL电推进系统可靠运行需要研究的重点。
4)eVTOL概念目前还停留在飞机阶段,如何实现空地切换需要设计同时满足地面和空中工况的驱动和推进电机。如何解决地面车辆和航空飞机在设计上的完全对立性,因为汽车设计需要下压力,并具有使其推向地面的空气动力学,但飞机的设计正好相反,汽车需要将质量平均分配在各个轮子上,而飞机90%质量集中在后轮上。如何进一步结合飞行汽车和地面汽车的行驶工况无缝切换,甚至跨介质(地面、水下、空中)工况运行,设计统一电推进/驱动系统是未来需要解决的问题。
作者简介
- 鞠孝伟(通信作者) ,博士,讲师,硕士生导师,研究方向为电气化载运装备用电驱动系统的设计、分析和优化。
- 龙佳兴,硕士研究生,研究方向为电动飞行汽车用推进电机设计与优化。
本工作成果发表在2025年第17期《电工技术学报》,论文标题为“ 电动飞行汽车用推进电机发展现状和研究综述 “。本课题得到国家自然科学基金项目、辽宁省科技计划联合计划(博士启动)和辽宁省教育厅高等学校基本科研项目资助。