穿越机 BF 地面站调参
一、设置
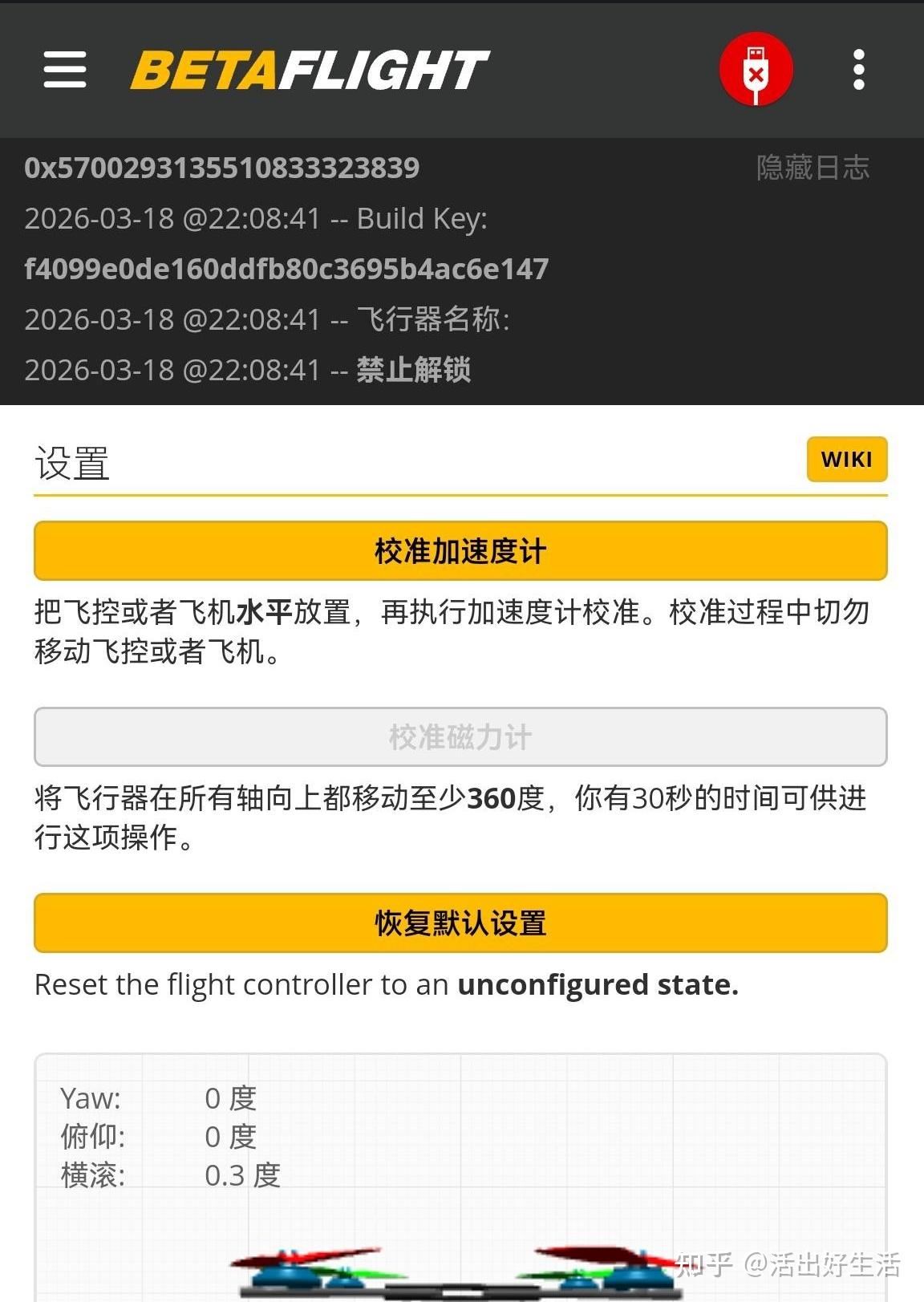
1.手机飞控用双type-C线连接,连接成功后如图:
1)校准加速度计
二、端口
2.打开“端口”界面


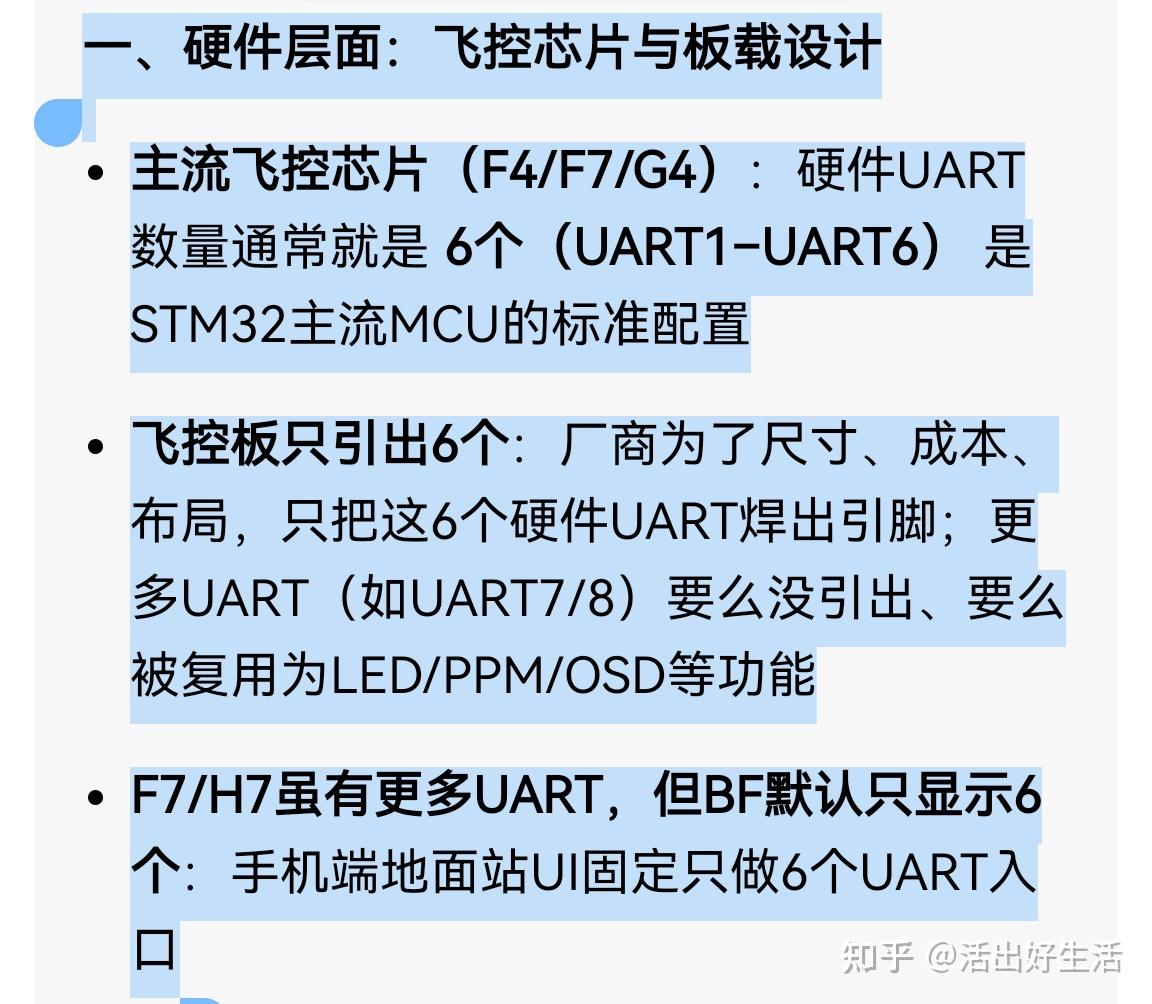
从UART1~UART6,共六个端口,对应硬件的T1、R1,T2、R2,直到T6、R6
如何设置呢?
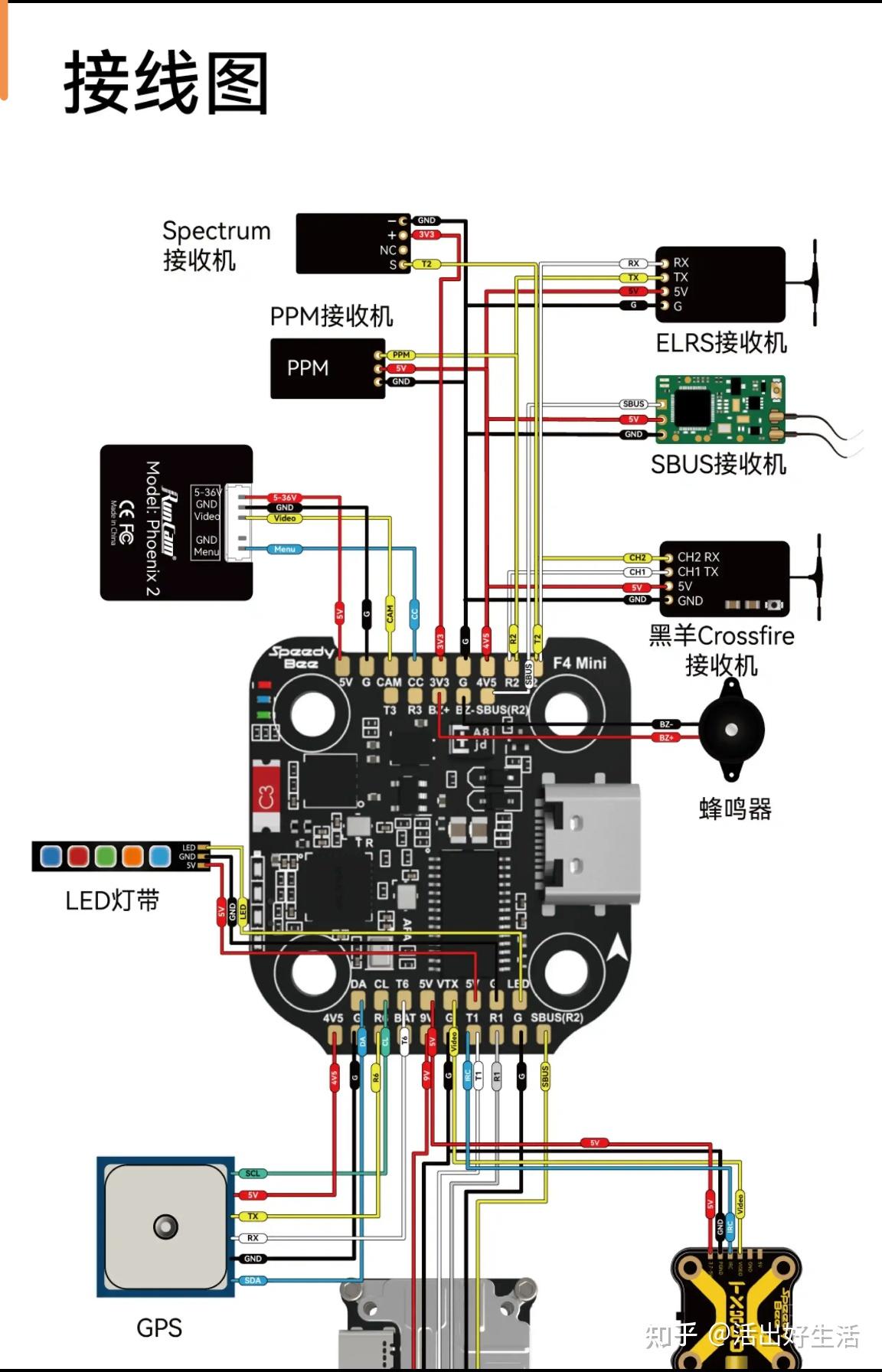
你的接收机,图传,GPS,等外设接在那个硬件接口上(T1~T6),就要打开对应的UART,并启用相应功能,才能使该外设正常工作。
最常用的接收机:打开“串行数字接收机”

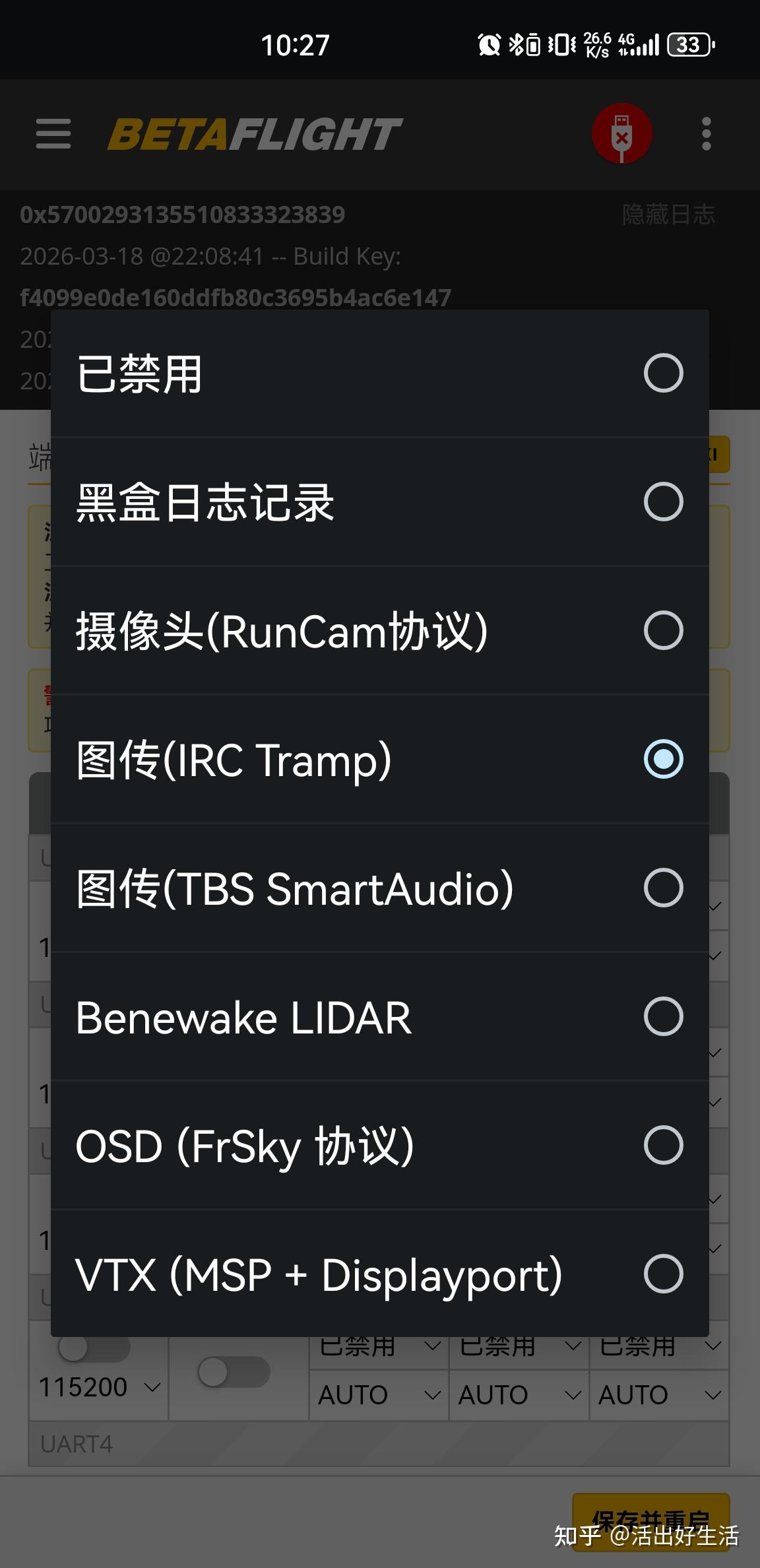
图传:打开“设置/MSP”,在“外设”中选择“图传”,根据你用的图传类型选择对应协议,TBS是黑羊的图传协议,IRC是一种开源图传协议

遥测输出:
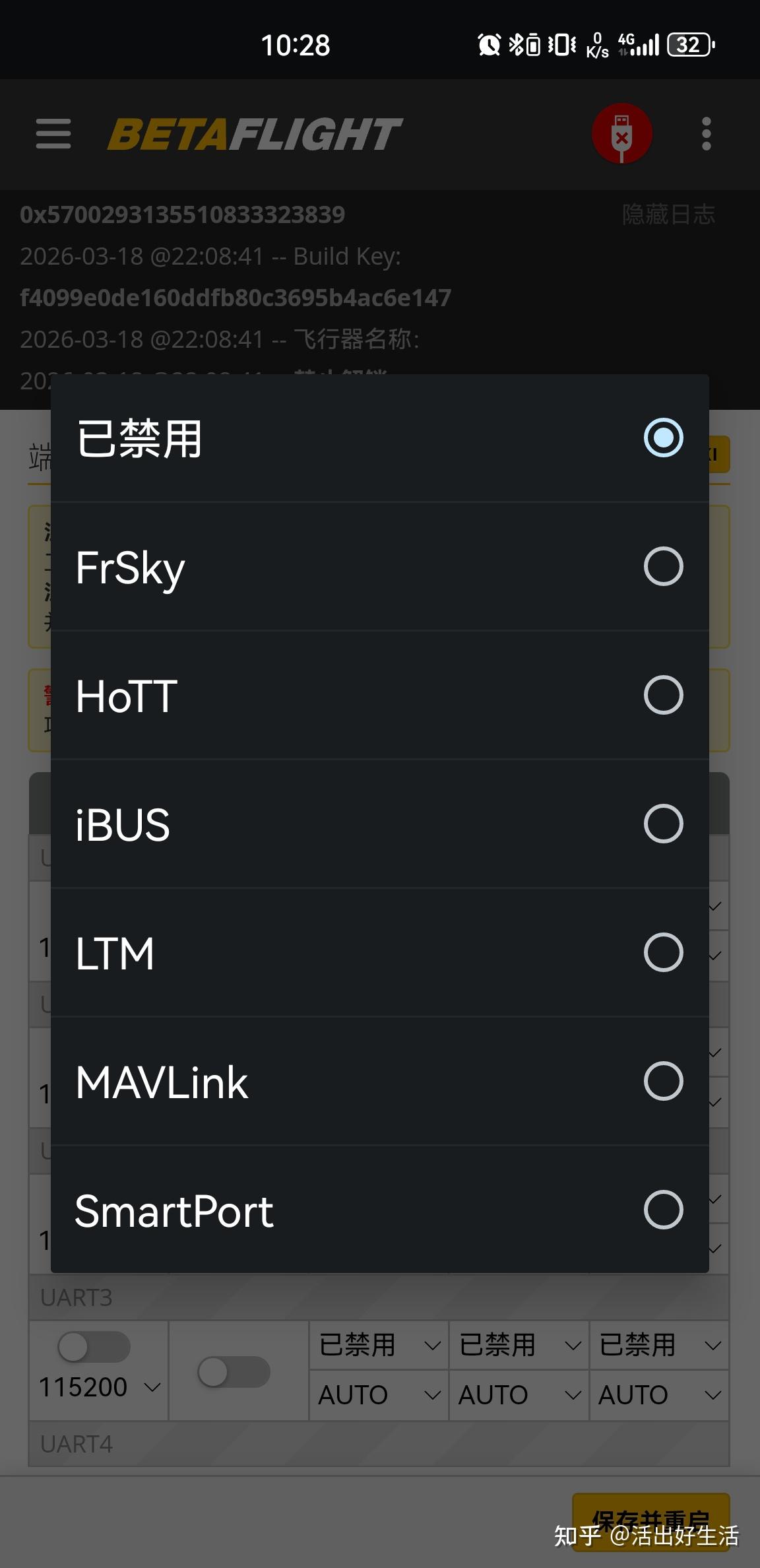
| 遥测输出(Telemetry output)协议 | 适用范围 | 波特率 | ||
|---|---|---|---|---|
| FrSky | ||||
| HoTT | Graupner HOTT遥控 + 接收机 | |||
| iBUS | FlySky 富斯遥控 + 带IBUS遥测的接收机(iA6B、iA10、X6B等) | 115200(固定,必须硬件UART,不支持SoftSerial) | ||
| LTM | ||||
| MAVlink | ||||
| SmartPort | FrSky 睿思凯遥控(X9D/QX7等)+ X系列接收机(X8R、R‑XSR、XSR等) | 57600(默认) |
三、配置
四、动力&电池
五、失控保护
六、预设

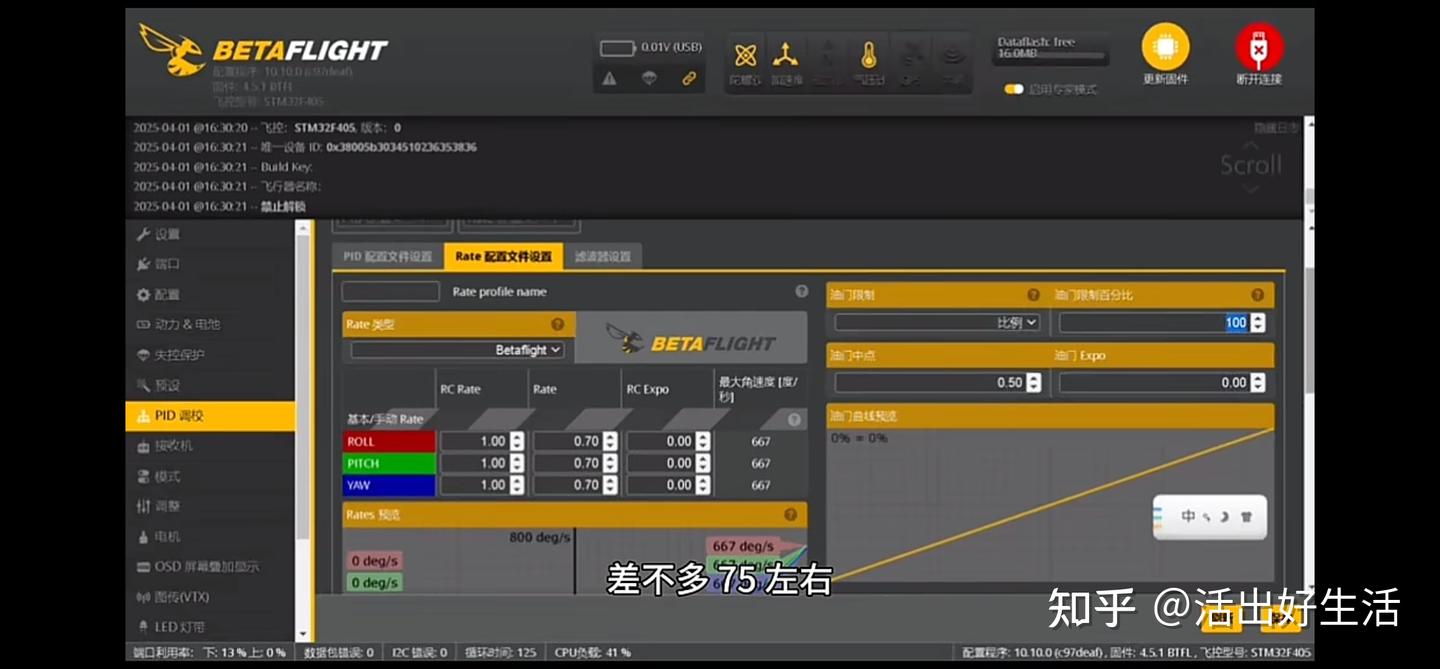
七、PID调校

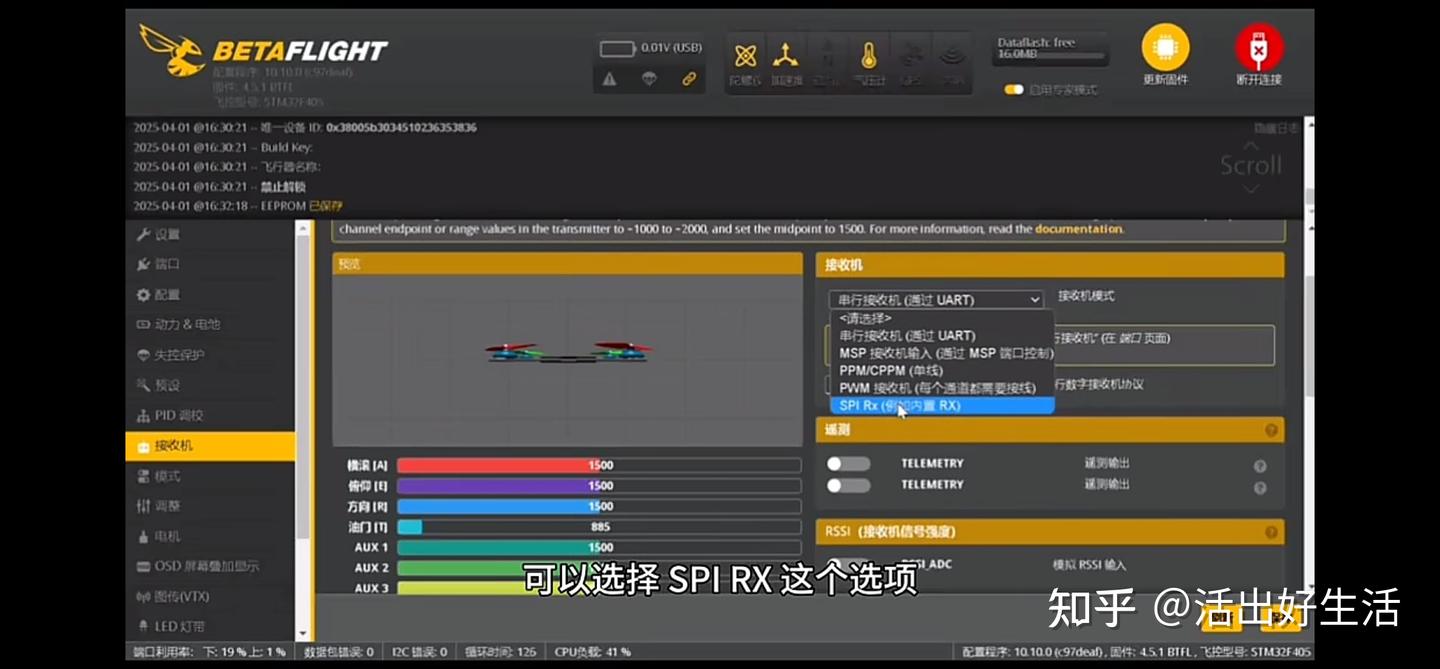
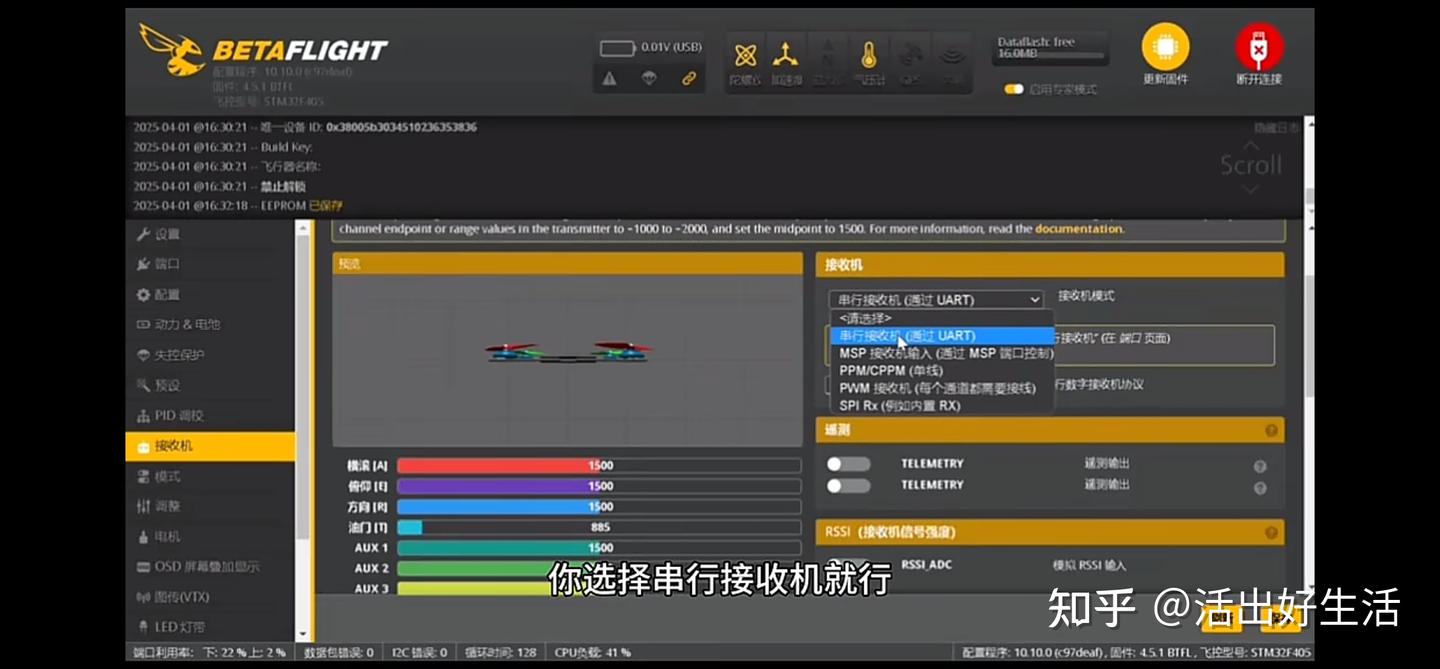
八、接收机

一)接收机模式:一般选串行接收机(通过UART),板载接收机可选SPI Rx
二)串行数字接收机协议
黑羊和ELRS用的都是CRSF协议。
三)通道映射:油门、俯仰等和实际不符时用
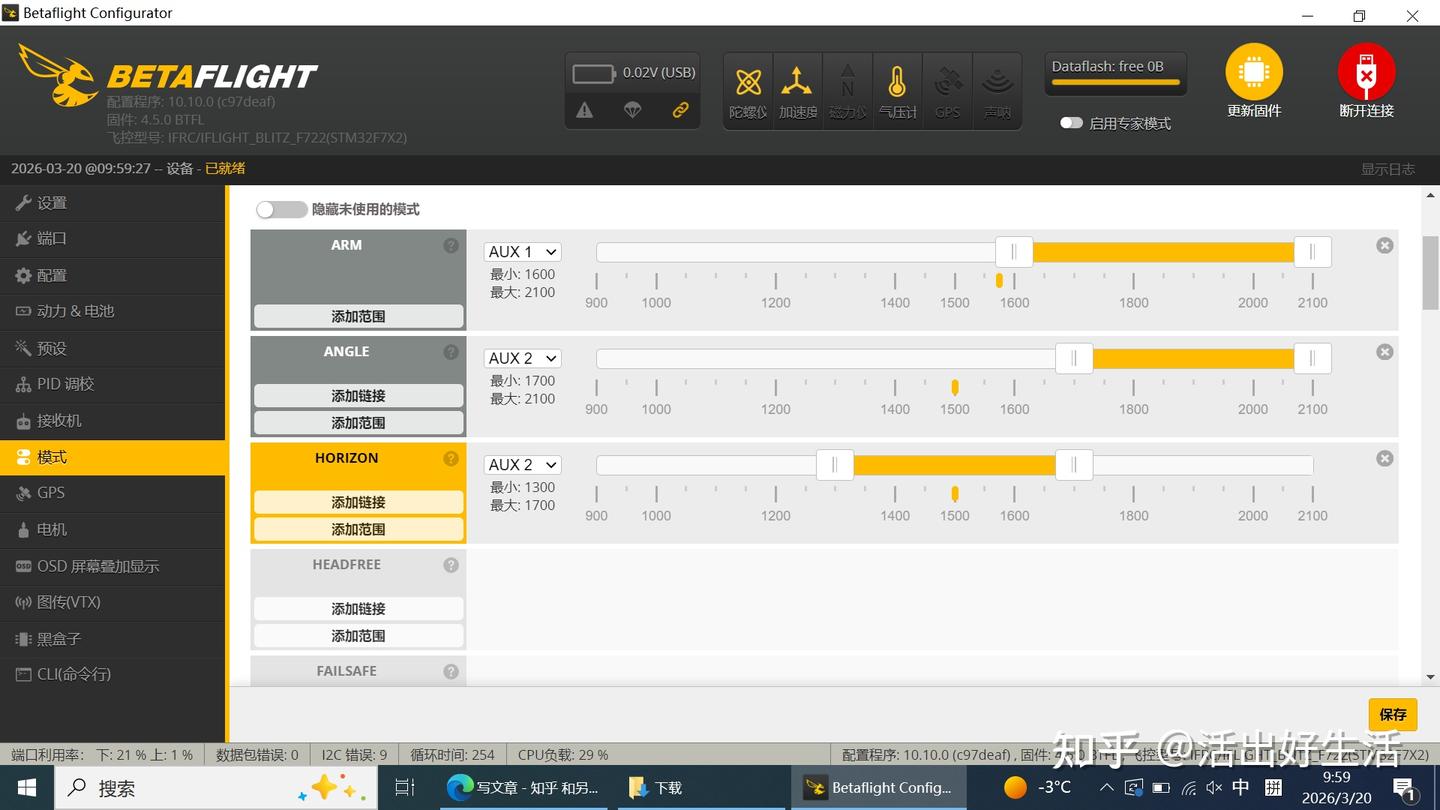
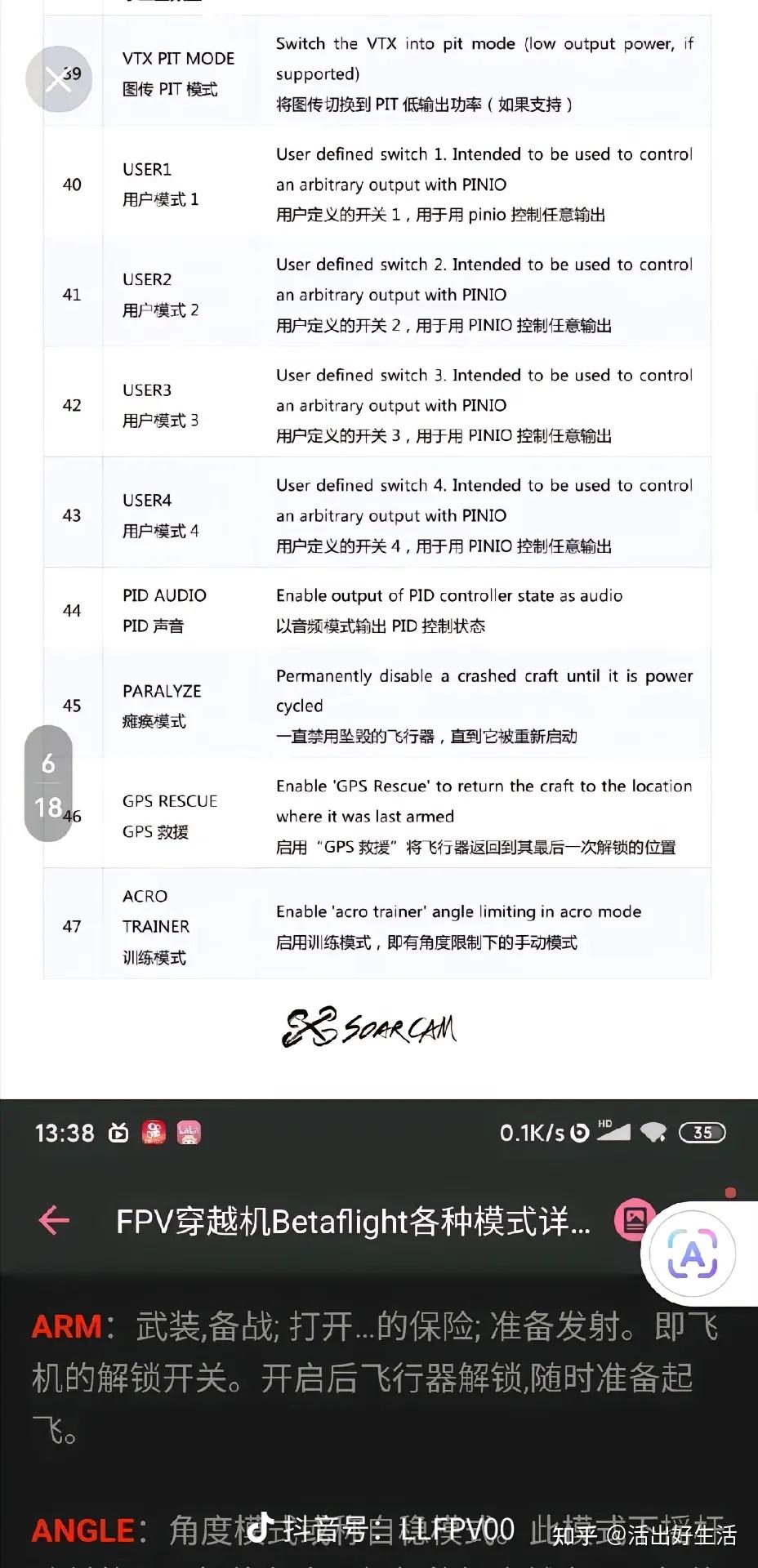
九、模式
| ARM | 解锁 | ||||||
| ACRO/MANUAL | [手动模式] | 每个轴的角速率直接由遥控器打杆控制 | |||||
| ANGLE | [自稳模式] | 摇杆映射飞行器倾斜角度,打杆的幅度越大,飞行器的侧倾角度越大 | |||||
| HORIZON | [半自稳模式]或[界限模式] | 在一定角度内,如<30°时是ANGLE模式,在>30°时是ACRO模式,这个界限不是突变的,而是渐变的,可在PID Tuning Tab - Angle/Horizon - Angle Limit中设置角度 | horizon | ||||
| HEADFREE | 无头模式 | ||||||
| FAILSAFE | 失控保护模式 | 一个开关来手动模拟飞行器失去遥控信号,使飞机进入失控保护姿态,有三种机制,分别为[Drop(掉落)]、[Land(降落)]及[GPS RESCUE(GPS救援模式)],通常是在测试FAILSAFE机制时使用 | failsafe | ||||
| GPS RESCUE | GPS救援模式 | 启用后当拨下开关,启动GPS救援模式,前提需要安装GPS并且在Configuration Tab中成功设置后才会跳出该选项。该模式下飞机以救援机制返回起飞点,与DJI的自动返航模式不同。DJI的自动返航机制是当飞行器收到指令,原地垂直上升至一定高度然后以该高度返航,到达HOME的位置垂直降落。而Betaflight里的[GPS RESCUE]则是当飞行器收到指令,则飞行器朝向HOME的方向直线砸向飞手,飞手在眼镜上观察到飞行器在安全距离后夺取控制权手动控制飞行器手动飞行。该模式具有一定的危险性,在人员密集处应慎用 | |||||
| BEEPER | 开启蜂鸣器便于炸机时找飞机 | ||||||
| OSD DISABLE SW | 打开或者关闭OSD | ||||||
| TELEMETRY(telemetry) | 打开或关闭遥测数据(数据回传) | 可将飞行速度、高度、电池电压、飞行时间等回传至遥控或回传接收端,需要遥测的遥控器和接收机支持 | |||||
| BLACKBOX | 打开或关闭黑匣子数据记录,支持记录飞行器的各种飞行参数,以便后期分析 | ||||||
| FLIP OVER AFTER CRASH | 反乌龟模式 | 炸鸡180°翻转着地时,可让一侧的两个电机反转,使得飞行器翻回正常姿态,需要支持Dshot协议的电调配合才能使用 | flip(翻转) over after crash(死机,炸鸡) | ||||
| PREARM | 预解锁模式 | 为了防止解锁键误按,多设置一个开关键,可以简单理解为同时打开PREARM和ARM时飞行器才能解锁,这样有效防止误碰解锁开关造成的安全事故 | |||||
| VTX PIT MODE | 图传PIT模式 | 防止在他人飞行中上电干扰他人飞行,可以以近乎0功率运行,同时你只有在及近的距离内(一般小于20cm内)才能收到图传信号 | |||||
| PARALYZE | 瘫痪模式 | 多人比赛时,当炸鸡时为了防止解锁坠毁的飞机造成危险,激活PARALYZE后,它会关闭图传和接收机,以避免干扰可能仍在飞行的其他飞行员,要关闭该功能,只能通过拔下电池来重置它。 | |||||
十、调整
十一、电机

一)电调协议
F405、F411选DSHOT 300
F7、H7选DSHOT 600
二)要打开双向DSHOT
十二、OSD叠加显示
十三、图传(VTX)
图传表:找图传厂家要!!
十四、LED灯带
十五、传感器
十六、日志
十七、黑盒子
十八、CLI命令行
编辑于 2026-03-20 · 著作权归作者所有