智能汽车玩法变了!“全域融合+数据中心”,改写整车架构创新范式
“全域融合+数据中心”正改写智能汽车的底层游戏规则,一个全新的架构创新范式已然成型。
在2026年国际消费电子展(CES)现场,车联天下(Autolink)正式发布全球首个深度融合电子电气架构 Deep Fusion EEA(商业化平台亦称为Al Link 3.0)。据了解,该架构的核心创新在于将全域融合架构与自适应FPGA SoC深度绑定,构建了“计算+通信+控制”三位一体的系统落地,从底层破解了传统架构的诸多痛点,比如显著降低传统冗余硬件带来的成本压力、提高整车能效与开发效率等。
作为行业首个系统层面实现深度融合的电子电气架构,车联天下Deep Fusion EEA的发布,标志着智能汽车电子电气架构从“多域协同”加速迈入“全域深度融合”的新阶段。
在车联天下看来,随着高阶辅助驾驶、沉浸式座舱及全域数据融合需求持续提升,传统分布式与多域架构在算力协同、实时通信与系统扩展性方面正面临根本性挑战。
基于此,车联天下提出以“中央计算 + 边缘计算”为核心的 Deep Fusion EEA,通过深度融合高通骁龙 8797 中央计算平台、AMD Versal AI Edge Gen 2 边缘算力平台 以及 光传PCIe通信技术,重构整车计算与通信体系,构建基于PCle超带宽的车载AI算力中心架构。最终目标是实现整车级所有传感数据的实时共享与融合,并支持多域算力与AI的协同运行,重新定义了面向未来的系统级融合新标准。
多位车企人士表示,深度融合电子电气架构可大幅缩短研发周期、降低新技术落地成本,有望成为未来3-5年智能汽车电子电气架构的主流选择。
01
行业变革催生新范式:
全域融合+数据中心破解架构瓶颈
当前,智能汽车正在快速迈向L3时代,千万级像素摄像头、高密度激光雷达等硬件持续叠加,驱动车载数据量呈指数级增长。同时,智能座舱与辅助驾驶正在深度融合,叠加端侧大模型的实时运行,对整车算力调度与数据传输更是提出了严苛要求。
然而,多数车企的整车电子电气架构升级仍存在明显局限:要么聚焦单一功能域的算力提升,要么停留在“多域芯片整合入单一盒子”的浅层融合阶段,普遍忽视了通信底层的瓶颈制约。
受限于此前骨干网络的带宽及实时性不足,大部分高速传感器直接连接中央大脑,这直接导致行业内“算力过剩但利用率偏低”、“功能叠加但协同低效”等问题凸显。
正是如此,车联天下Deep Fusion EEA给出了针对性破局思路:通过长距高速PCIe光通信环网与全域融合架构的深度绑定,重构整车计算与通信体系。
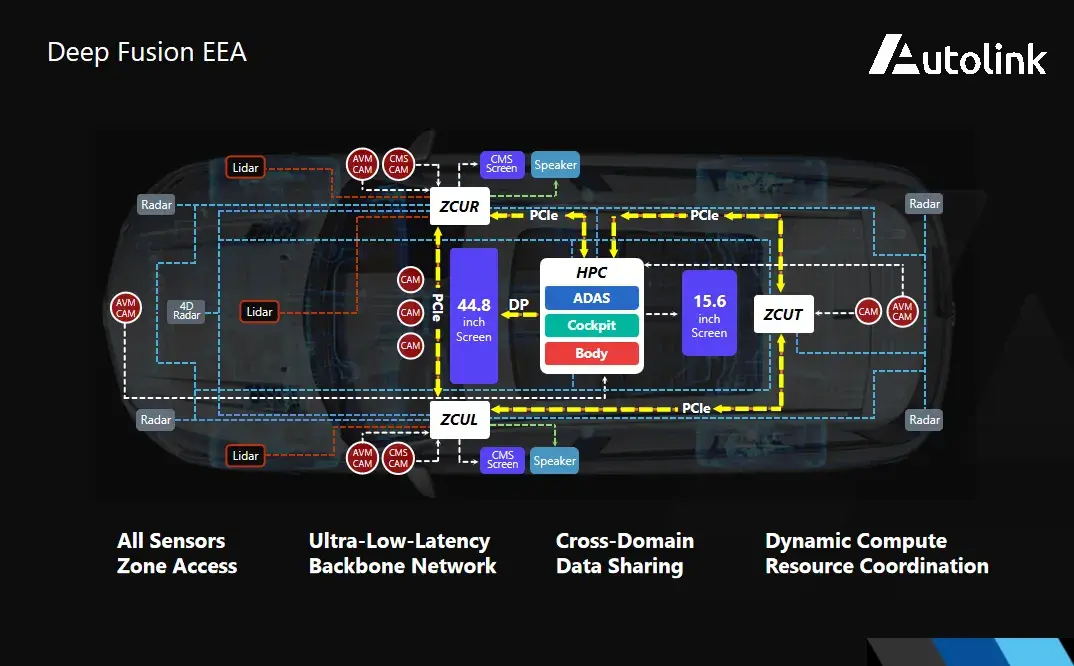
具体来看,Deep Fusion EEA 由中央计算平台、区域控制器与PCle骨干网络组成,通过重构整车计算与通信方式,实现微秒级的协同感知、决策与控制,构建了一个高带宽、超低时延(微秒级)的跨域数据共享环境,支持“中央计算+区域”一体化的算力高效协同。
其中,中央计算平台扮演“全局大脑”,承担高算力 AI 与全局调度任务;区域控制器作为“边缘AI节点”,具备独立AI计算能力,不仅可以实现传感与执行的本地化接入与控制,还可以提供关键的安全冗余。两者之间通过高速光通信技术实现互联,突破 PCIe 传输距离限制,实现跨域高带宽数据的实时流式传输与无缝交互。
在此架构下,Deep Fusion EEA 具备以下系统性优势:
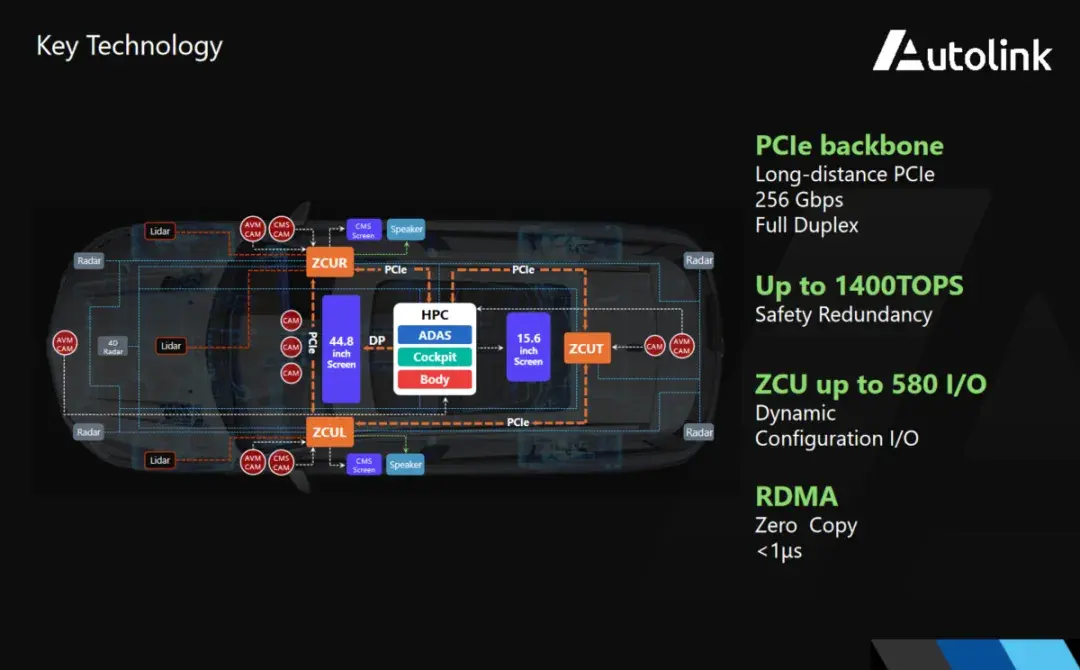
- 构建了面向未来的“基于PCle超带宽的车载AI算力中心架构”,可实现低于 1 微秒的端到端延迟和 256 Gbps 双向带宽能力;
- 支持 1700 万像素等高分辨率感知硬件的数据传输需求;
- 整体算力可达 1400 TOPS 的失效冗余设计与异构冗余架构,可为 L3/L4 自动驾驶筑牢功能安全防线;
- 实现跨域算力共享与动态调度能力,提高整车计算资源利用效率;
- 为端侧大模型、舱驾协同等前沿应用提供可持续演进的基础。
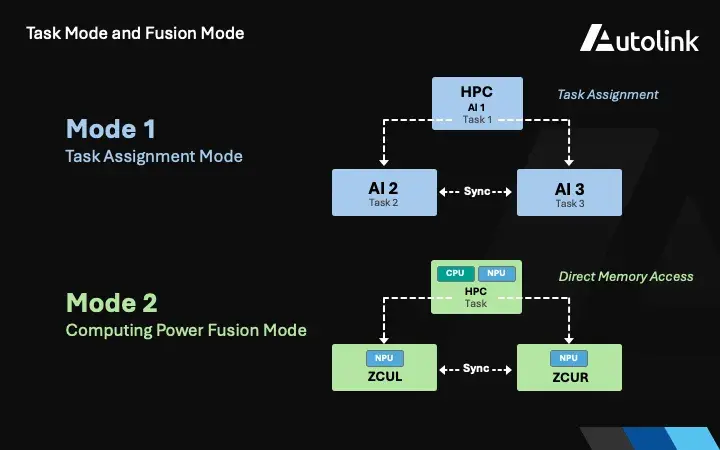
另外,需要特别提及的是,Deep Fusion EEA在支持传统多芯片AI任务分配模式时,还可利用PCle的超大带宽及DMA(直接内存访问)机制,实现类似数据中心的、完全互联的多芯片算力池。因此,该系统能够高效处理参数量更大的AI模型,从根本上降低了多芯片协同执行单一AI任务时面临的软件复杂度与算力损耗问题。
可以看到,Deep Fusion EEA的设计跳出了传统“域划分”的固有逻辑,让计算、通信与控制在系统层面真正融合,使整车具备系统级进化能力,为未来十年的高阶智驾、端侧大模型、车载 AI Agent以及全场景智能交互建立起体系化的技术底座。
车联天下副总裁、首席战略官李志刚表示:“Al Link 3.0 Deep Fusion EEA 并不是为某一款车型或某一代产品而设计,而是面向未来十年智能系统演进的一次底层重构。”在他看来,随着算力集中、通信方式重构和软件复杂度提升,只有打破域的边界,实现系统级的深度融合,才能支撑智能汽车的长期演进。而中央计算与区域协同的形态,终将成为未来智能汽车的基础架构。
毋庸置疑,Deep Fusion EEA 为行业提供了一条可落地、可扩展、可长期演进的架构路径。
02
从架构到平台,
为“量产”铺平道路
为让Deep Fusion EEA的核心优势充分释放,车联天下同步推出两款高度匹配的核心硬件平台,形成了“架构定义需求、硬件承接落地”的完整闭环,为规模化量产铺平道路。
具体来看,这两款硬件平台分别聚焦中央算力调度与区域协同接入,通过深度适配光通信技术,与架构形成高效协同,共同构建起“中央+边缘”的全域计算与通信生态:
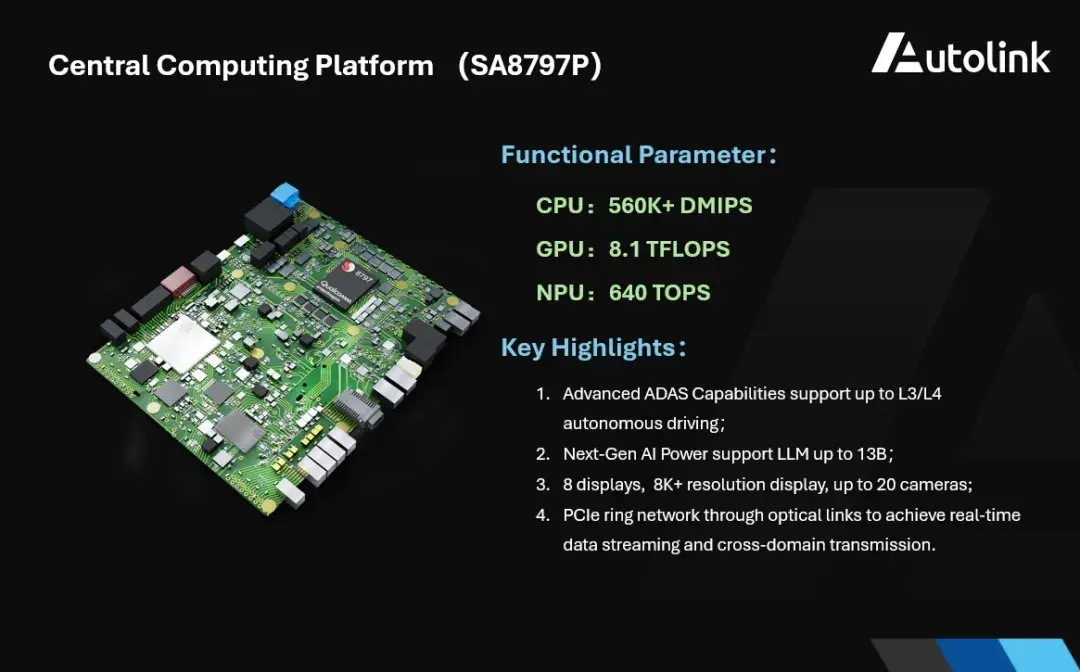
- AL-A2 高端舱驾融合中央计算平台:
- 基于高通第五代骁龙平台8797芯片打造。支持高阶自动驾驶,可流畅承载高达 13B AI 大模型。支持 8 屏显示、8K+ 分辨率与 20 路摄像头接入,并通过光链路构建 PCIe 环网,实现数据实时流式传输、无感跨域交互及与边缘节点的算力共享。核心性能指标:CPU 算力 560K+ DMIPS,GPU 算力 8.1TFLOPS,NPU 算力达 640 TOPS(稀疏)。
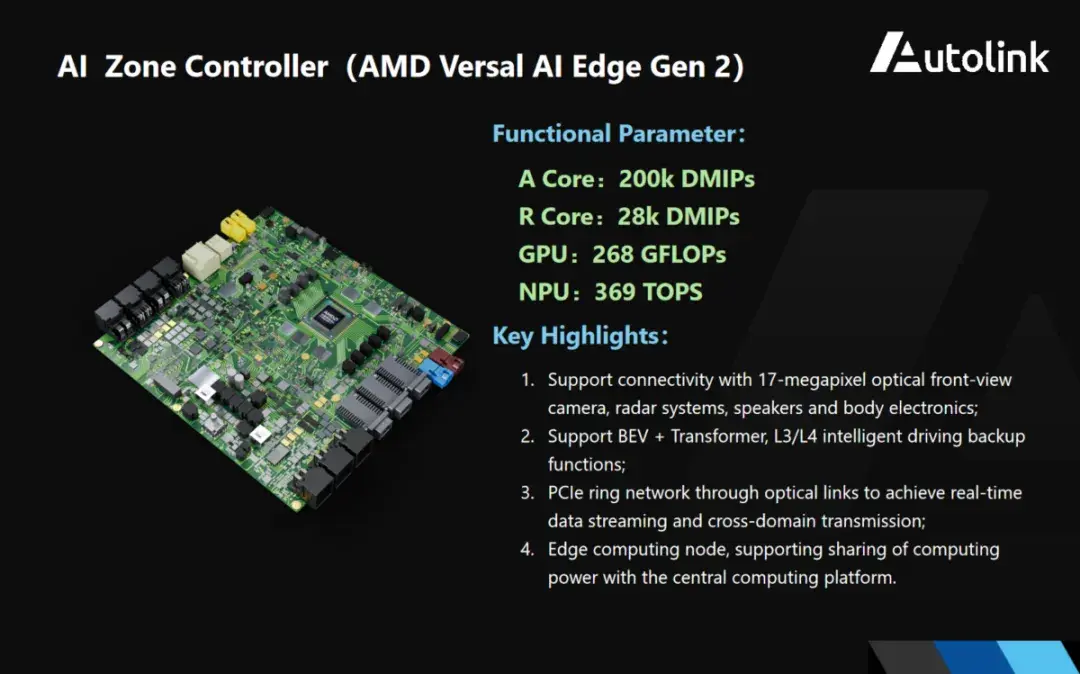
- AL-Z2可支持光通信的协算区域控制器:
基于AMD Versal AI Edge Gen 2 芯片平台。核心性能指标:A核200K DMIPS,R核28K DMIPS,GPU 268 GFLOPS,NPU 算力369 TOPS(稀疏)。可接入17M 前视摄像头、高清摄像头、雷达、音响及车身域电子单元,满足ASIL-D 功能安全等级,并集成CMS 功能。支持BEV + Transformer 感知架构,适用于高阶自动驾驶、Robotaxi及具身智能场景。同样依托光链路 PCIe 环网,与中央计算平台实现高效协同。
据了解,上述两大硬件平台式Al Link3.0的核心载体,也是“基于PCle超带宽的车载AI算力中心架构”的关键组成部分。
总体来看,Deep Fusion EEA 不仅是一种技术形态,更是一套面向复杂智能系统的底层设计方法。通过统一设计计算、通信与控制协同方式,该架构为智能汽车从“功能智能”迈向“系统智能”提供了可扩展路径,也为更广泛的智能形态预留了发展空间。
作为车联天下“全域化·全球化·全体系”新十年战略的重要一步,Deep Fusion EEA 的发布,标志着“基于PCle超带宽的车载AI算力中心架构”的正式落地,同时也是多域融合迈向整车级系统融合的关键跨越。
在此之前,车联天下已经实现了全球首个单芯片舱驾一体方案的正式量产落地,并且在智能座舱、区域控制区等关键领域实现了重要突破,为全域深度融合架构的研发与落地积累了坚实的量产经验与技术基础。
未来,车联天下将持续深化电子电气架构领域探索,与全球伙伴开放协作,以 AI Link3.0 为起点,推动智能汽车技术与产业持续演进。