高速驾驶你习惯开智驾吗?
我自己开车用辅助驾驶偏谨慎,在高速上还是提着心劲的。
这种警惕来自我本身的专业背景,以及一些咨询项目积累的思维惯性。人一旦“习惯”,就很难“做紧急决策”。
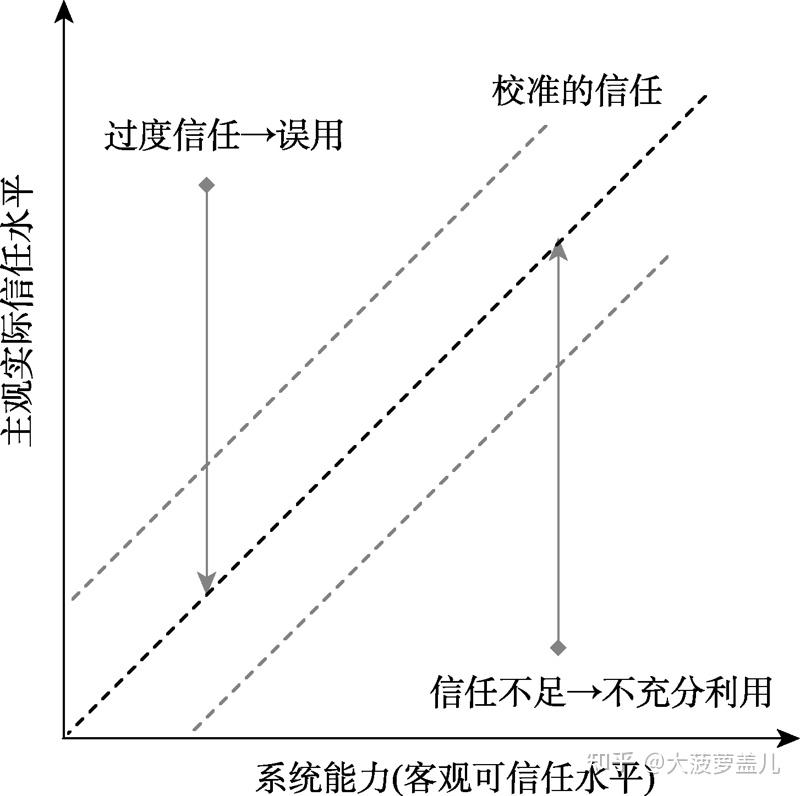
人对辅助驾驶自动化系统的信任,通常经历三个阶段:
第一阶段是"校准期"——频繁测试系统边界,故意不接管以观察反应,这个阶段的接管率反而偏高,但认知是准确的。
第二阶段是"依赖期"——系统表现稳定,接管率下降,注意力开始漂移,这是效率最高的阶段,也是风险累积的阶段。
第三阶段是"盲区期"——遇到系统从未出错过的场景类型,完全放弃预判,直到出现一次超出ODD的极端情况。
2026年的高速智驾,正在把大量用户推入第二阶段,而第三阶段的黑天鹅事件尚未充分暴露,我的判断是未来3-5年会有一个智驾事故的高发期。
说个例子:2026年3月,某品牌高速NOA在沪昆高速一段临时改道路段的表现。该路段因施工将左侧车道封闭,导流线以非常规角度切入主路。系统在先前的数百次通行中从未遇到类似拓扑,最终选择跟随前车轨迹而非识别地面标线,结果前车是人工驾驶且临时决定变道,系统反应滞后,驾驶员紧急接管。这个案例的特殊之处在于:如果驾驶员"不习惯"智驾、保持高度监控,接管会更早;正是因为"太习惯了",监控阈值被拉低。
这类事件的公开报道极少,因为多数以成功接管告终,不构成事故。但它们构成了一个沉默的样本库,影响着真实的信任曲线。
2026年的高速智驾市场,可以按技术路线划分为三个阵营,它们给用户的感知体验存在差异,也不能一概而论。
第一阵营是"重感知轻地图"路线,代表为特斯拉FSD v14.3.3。这一阵营的优势在于ODD边界模糊,系统试图在任何有铺装路面的场景运行;代价是行为一致性较低,同一匝道两次通过可能有不同策略。对于习惯开智驾的用户,这种不可预测性是隐形成本—你需要持续保持认知加载,无法真正放松。
第二阵营是"高精地图+实时感知融合"路线,代表为华为ADS 4.0、小鹏图灵AI智驾。这一阵营在已知高速路段表现高度一致,匝道策略、变道时机、限速遵循都有"标准答案";但在地图未覆盖或更新滞后的路段,系统能力断崖式下降。习惯的代价是"路径依赖"——你习惯了它的好,却可能在陌生路段遭遇预期外降级。
第三阵营是"车路协同"路线,目前仅在部分示范路段运营,如京雄高速、沪宁高速部分区间。这一阵营理论上能突破单车智能的感知边界,但2026年的基础设施覆盖率决定了它还不是消费者层面的可选项。
如果你的车型支持高速NOA,不等于你常走的那条高速在系统的舒适区内。建议用三次以上的手动驾驶记录该路段的特征:是否有频繁施工、是否有非常规匝道拓扑、是否有大量异形车辆(如联合收割机跨区作业、大件运输)。这些特征在车企的ODD描述中通常不会被提及。
第二步,建立个人接管阈值。不要依赖系统的"请接管"提示—在2026年的技术条件下,系统对自身不确定性的估计并不总是准确的。设定你自己的触发条件:前方出现静止物体且系统未在2秒内减速、匝道前500米仍未开始变道、相邻车道有大货车并行超过5秒。这些条件应该被主动监控,而非被动等待。
第三步,周期性"脱习惯"。刻意选择非高峰时段关闭智驾,手动驾驶以刷新对车辆动态、路面状况的体感记忆。这个建议听起来反效率,但针对的是"盲区期"的认知退化。
参考来源:
1. 汽车之心,《2026年智能驾驶传感器配置趋势报告》,2026年4月
2. 42号车库,《主流高速智驾HMI交互对比评测》,2026年3月
3. 电动邦,《特斯拉FSD v14.3国内高速场景实测》,2026年5月
4. 作者基于行业内部交流材料整理,2026年一季度保险理赔数据
---