这种望远镜放大式的相机取景器有何用处?
这个设备非常好的解释了什么叫“尺有所短寸有所长”。一个视频给就明白,而且会发现这个工程原理在许多场景都有应用:
 长焦取景器,和寻鸟镜,看到效果如视频所示。https://www.zhihu.com/video/2036406014237520595
长焦取景器,和寻鸟镜,看到效果如视频所示。https://www.zhihu.com/video/2036406014237520595原理很简单,你想要拍照效果好,那就得用长焦,但是长焦FOV就窄,超过视野外你就看不到
而且焦距越长,抖动/速度差带来影响就越大。拍摄飞鸟这些快速移动物体,稍微一点抖动,东西跟丢了,你可能都找不到了。
这个时候用一个短焦距、视野更宽的瞄准镜/寻鸟镜,就能有效解决“找不到鸟在哪”问题。
生态摄影/体育摄影,抓拍到比拍好更重要,一定优先保证东西不跟丢,剩下的事情交给强大的自动对焦和后裁切去做。
另外不光拍飞鸟这种快速移动场景需要寻鸟镜,天文摄影也有专门的“寻星镜,长这样:

原因就是主镜放大倍率太高了,视野内经常一片黑,只能看到个别星点,根本找不到东南西北。就得靠倍率较小的寻星镜先找大致方向,再精细微调。
而且不光是天文摄影,显微镜也有类似结构,这个上过初中生物的大概都知道,也就是“粗准焦”和“细准焦”
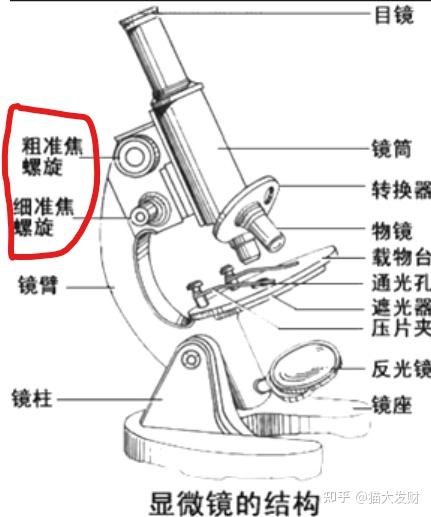
显微镜倍率太高了,景深只有几个微米,但是载玻片物距是按厘米算的,差了上千倍怎么办,要速度就没准度,要准度就没速度,那干脆就把粗调节和精调节分开,先调粗准焦快速对位置,再用细准焦半微米半微米对进。
递进式结构在太多场景都有用了。如果你没用到,说明你干的活都是粗活,没有“跨度”。
再举个例子,VR注视点渲染。
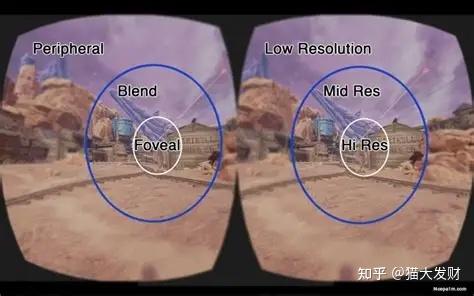
VR设备要提供沉浸质感,就要让相场尽可能大,但也要保证显示精度,不然看起来就粗糙。现在入门的VR设备单眼分辨率20002000以上,两个就是4000*2000,等同于4K显示器;这还是最入门的水平,好一点的VR渲染压力直接堪比8K显示器。
这时候精度和广度不可兼得,不然显卡渲染不过来,咋办,人眼虽然感受的视野很广(接近左右180度),但是聚焦的区域很小,那干脆就追踪眼睛注视位置,你看哪儿,我就只把那个小范围精细渲染,其他地方粗略渲染就可以,这样显卡消耗就降下来了。
再再举个例子,搜索引擎。
互联网上有海量信息,想要检索他们,一定要遍历其中大多数,而这个过程非常消耗时间,要想搜的全,就要搜很久;要想搜的快,就可能有些内容扫不完,要遗漏东西。
那怎么解决,上个世纪计算机性能还没那么好,工程上就出现了“深度优先DFS”和“广度优先BFS”两种算法
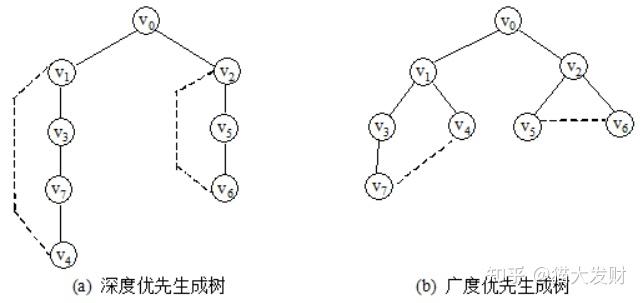
绝大多数搜索引擎,都是优先使用BFS尽可能获得更宽泛信息,随后给这些信息相关性进行分析和排序,再对权重高的内容做深度搜索,这样一来,有效破除了互联网诸多相互引用带来的重复检索,用非常高效的方式找出可能是最有用的内容。
再再再举个例子,汽车方向盘可变转向比
转向比是指方向盘输入与轮子角度变化之间的比例。转向比越大,动同样方向盘角度,车轮转向越少。这样一来,高转向比=省力杠杆,操作平滑,但是打方向更慢、圈数更多;低转向比=响应灵敏,一点输入车就动作很大。
可是开车时候我们希望高速越稳定越好,如果太灵敏,驾驶会很紧绷;但低速时候又希望稍微动动方向盘就能轻松转更多,那怎么办,
干脆用电机驱动,把转向比做成可以按速度改变的。低速时候打一点方向就能拐弯调头,高速时候不会过于灵敏又省力。
别只看表面一个小小取景器怎么价格这么高快赶上入门机身了,实际对于扛着长枪大炮的专业摄影佬来说,这点价钱甚至没到器材的1/10,但解决的问题可是相当具有实用性的。
尺有所短寸有所长,不单单是老祖宗朴素经验,更是现代人类文明里广泛应用的工程智慧。
以上。