扫地机器人明明有眼睛(摄像头),为什么还是会专挑桌腿撞?
这就好比在问为什么我们明明有眼睛,却解不了哥德巴赫猜想一样

因为眼睛看见≠识别,更≠能够及时反应
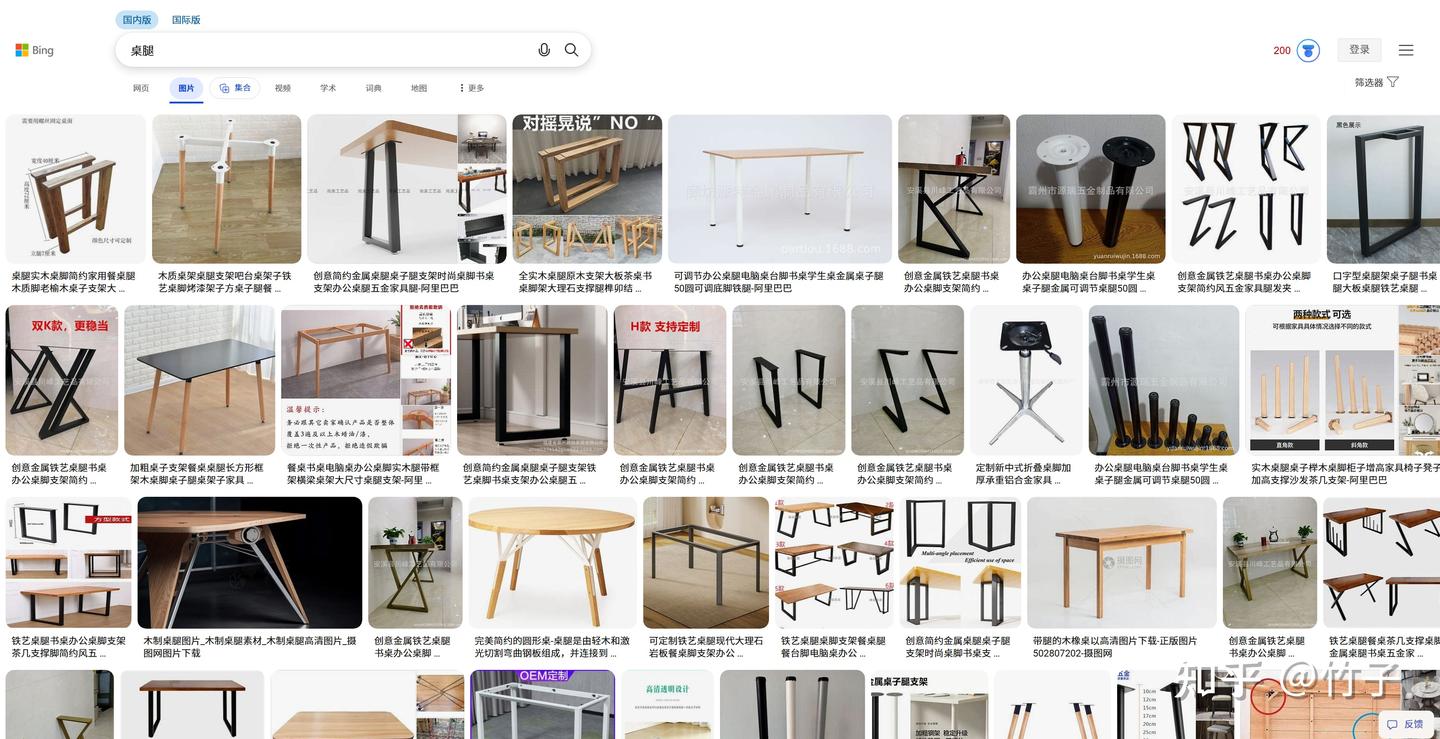
扫地机摄像头哪怕精度再高,也只是提供了外界原始图像数据,关键在于内部算法如何识别和解读这类数据。我随手搜了下“桌腿”关键词,看这千奇百怪方的圆的,别说扫地机了,你敢拍胸脯说自己看到一张局部特写就能认出来这是桌腿吗?
物体识别的AI模型需要海量多样化的图片进行训练,所以要想让扫地机精准识别,就得把实木、陶瓷、圆柱、方柱、雕花、金属、木质、带横梁的等各种各样的桌腿“喂”给它,这可是个大工程,优先级必然放在大型静态障碍物比如沙发、墙壁、门框等以及小型但容易导致扫地机清洁工作受阻甚至损坏的电线、拖鞋、宠物粪便等后面——而这些,市面上主流产品在识别上已经相当成熟了

另外,处理器的响应速度决定了识别桌腿后扫地机能否从容避开,这也是扫地机产品有待提升的
毕竟从摄像头捕捉图像,到处理器分析图像、识别物体、计算距离和路径、最后向电机发出转向指令,这个过程需要时间。针对小型障碍物,大部分扫地机器人更多依赖机身前方的碰撞传感器和近距离传感器,因此只有当障碍物进入这个近距离传感器的探测范围时,机器人才会紧急转向或停止,如果响应速度不够快,就会出现“脑子反应过来了但身体跟不上”的情况
以上 @知乎家电
编辑于 2026-04-14 · 著作权归作者所有