如何通过镜头的mtf图判断镜头能‘喂饱多少像素’?
前言
好一个数学建模问题,但“镜头是否能喂饱相机”从来不是一个孤立的镜头性能问题,要分析就必须考虑到整个相机系统。
回答已经尽量写得简单,但是读者需具备以下前置知识:波动光学、傅里叶变换、信号处理、半导体物理、数理统计,话不多说直接开始👇
相机系统是一个由镜头、彩色滤光片阵列(CFA)、传感器、图像信号处理器(ISP)等众多环节构成的完整成像链路,每个环节都会对整个系统的信息传递能力产生直接影响。故为计算方便,我们对其建模时一般可以化简为如下模型 [1]:
上述公式中,
为镜头的调制传递函数,由光瞳函数所描述的孔径衍射与像差场共同决定:光瞳面上的相位扰动(像差)与振幅分布(衍射)通过相干叠加与自相关积分过程,共同在频域中决定了
为光学低通 (Optical Low-Pass Filter) 的调制传递函数。
为传感器的调制传递函数,其主要源于像素采样的空间积分效应,表征传感器光电转换单元对空间细节的平均响应。对于矩形像素,
应当指出的是:
- 一般情况下,镜头评测测出来的都是
。
- 镜头厂商给出的
- 综上,模拟值大于实测并不奇怪,甚至可以说是必然的。
1. 认识两种MTF:MTF vs 频率和MTF vs 视场
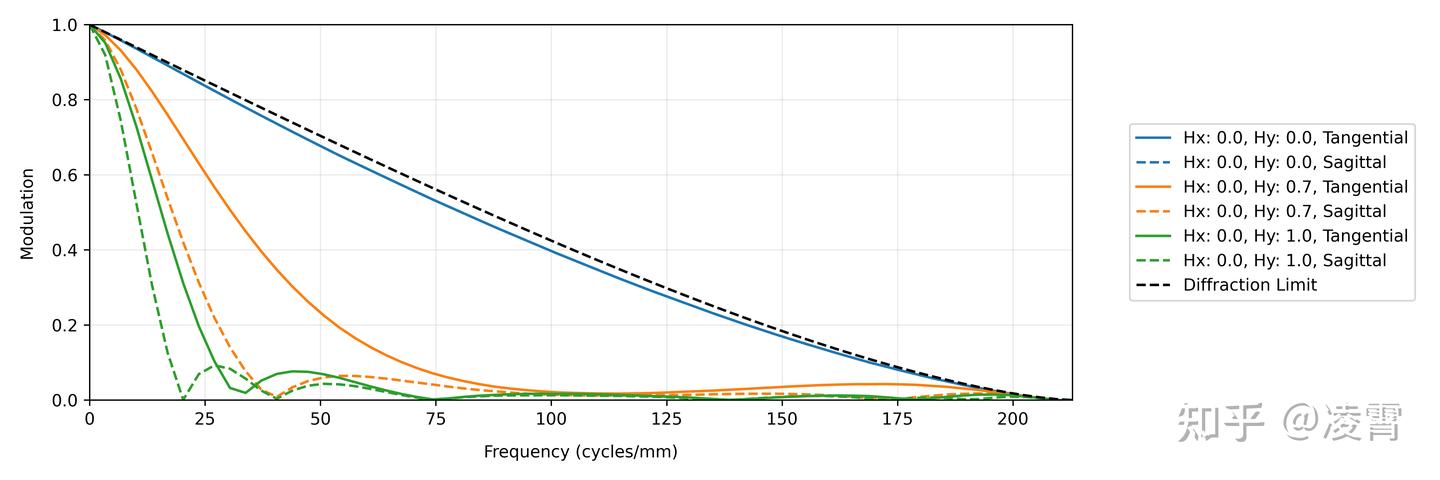
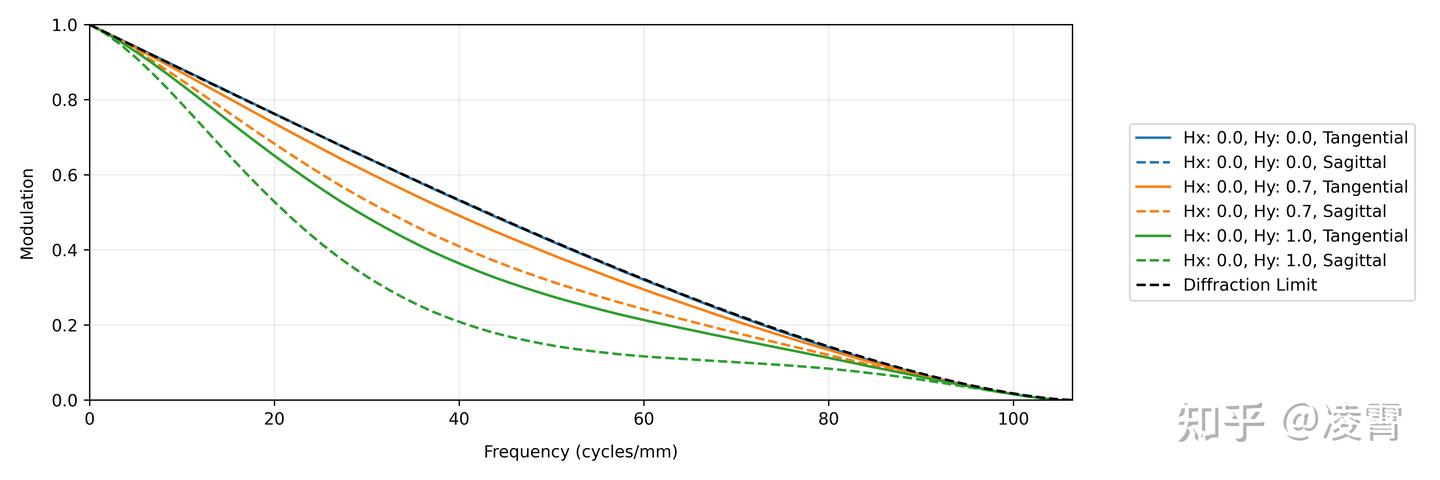
镜头MTF一般会有下面两种画法,如下图所示[2]:
- 一种是MTF vs 频率(左图),以空间频率为X轴,不同视场为图例。
- 一种是MTF vs 视场(右图),以视场为X轴,不同频率为图例。
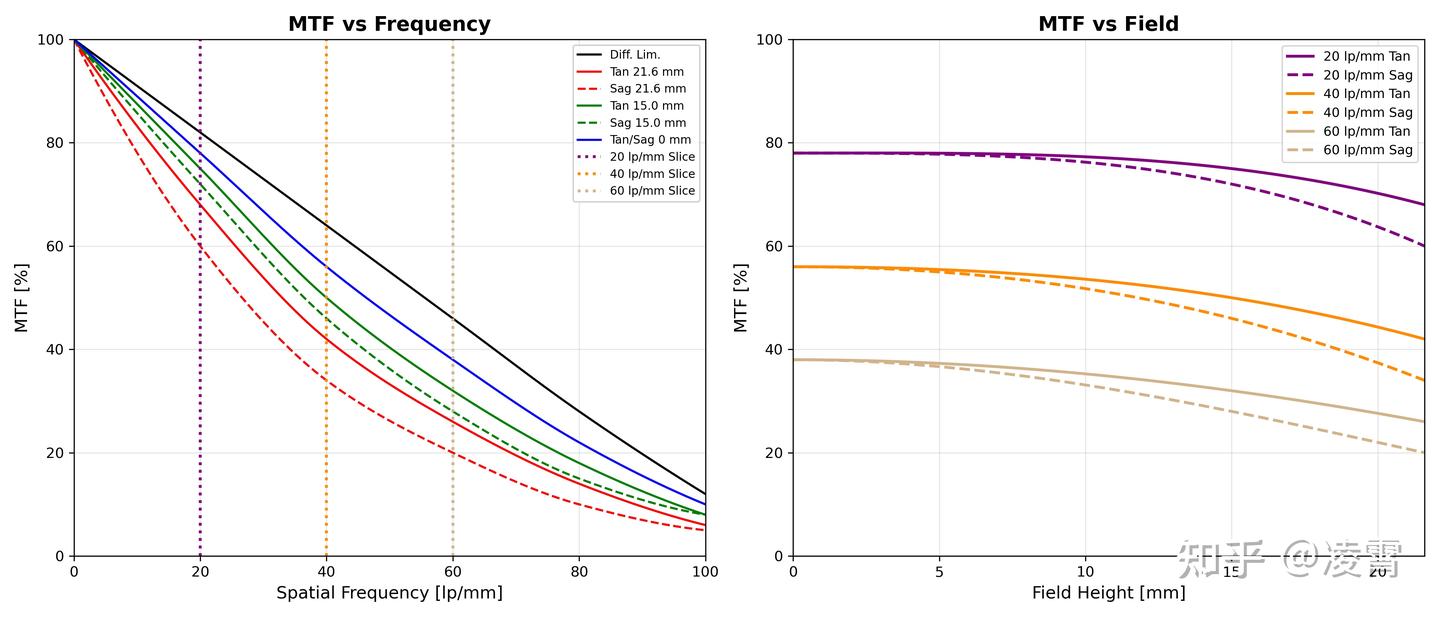
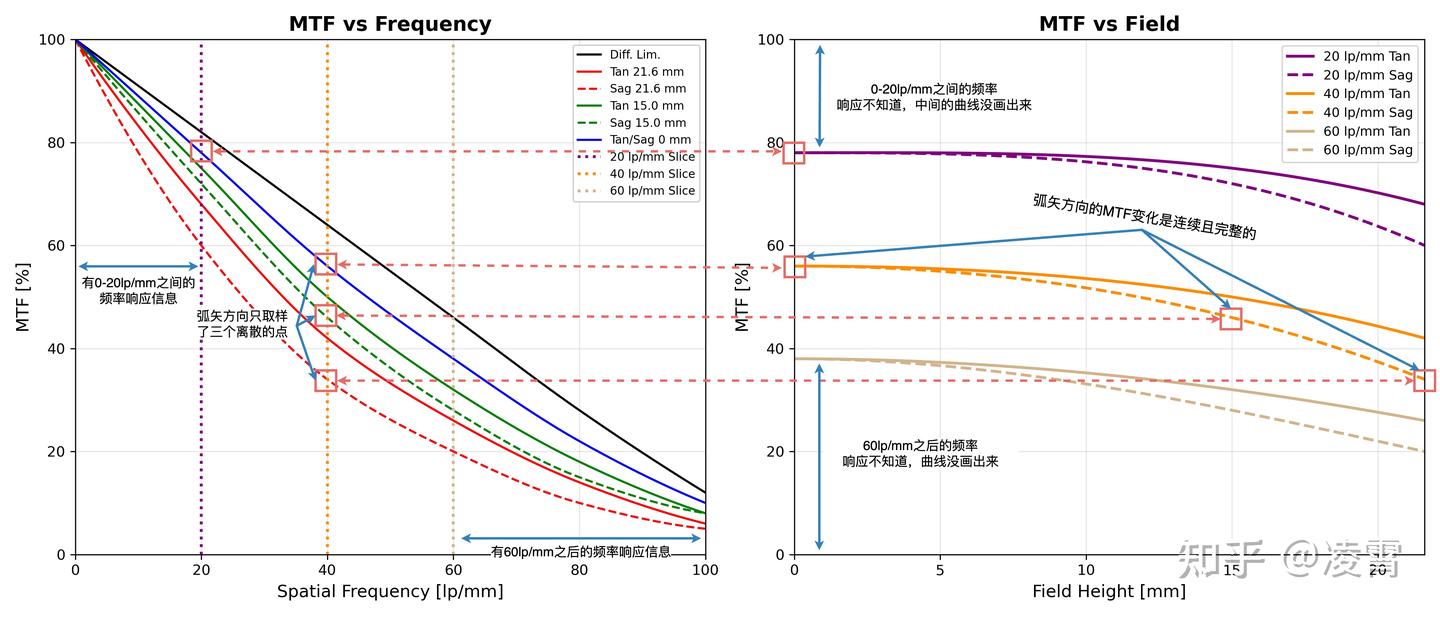
简而言之,上面这两张图只是把X轴和图例对调了,实际上描述的是同一个镜头。只不过左图的频率响应更丰富,右图的沿视场离轴性能变化更全面。一般镜头厂商给的就是右图,这种好处是一眼看出离轴性能变化,但缺点是MTF只在个别频率有取样,其他频率区域的性能其实是缺失的。
而左图一般在光学工程中常见,曲线的数量和视场上的取样点有关。这里的例子是取了三个点,分别是中心(0mm)、APSC边角(15mm)和全画幅边角(21.6mm),具体标注如下图。
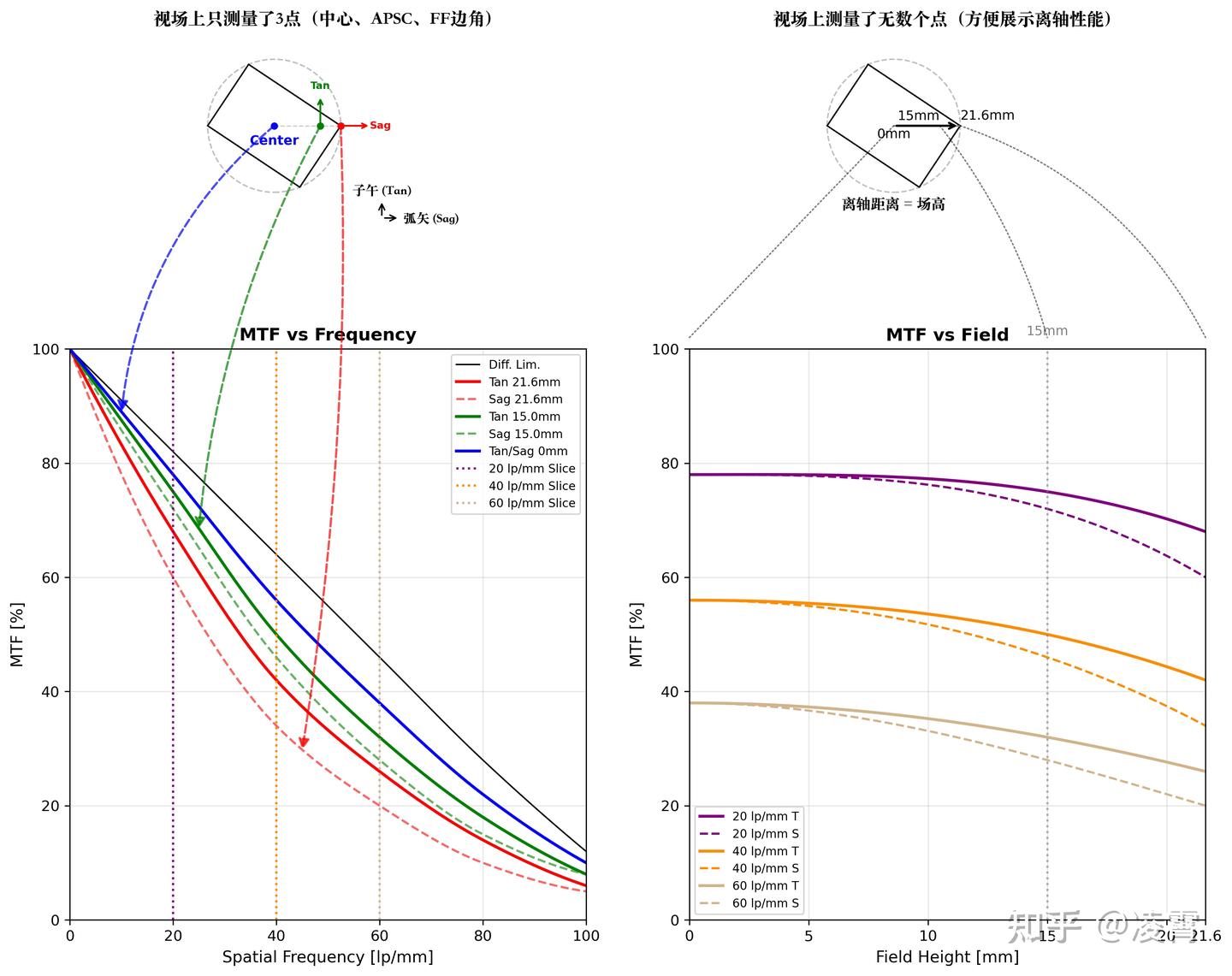
可以说两者各有优缺点,但是做光学分析一般还喜欢用左图,因为它在不同频率上的取样更完整。
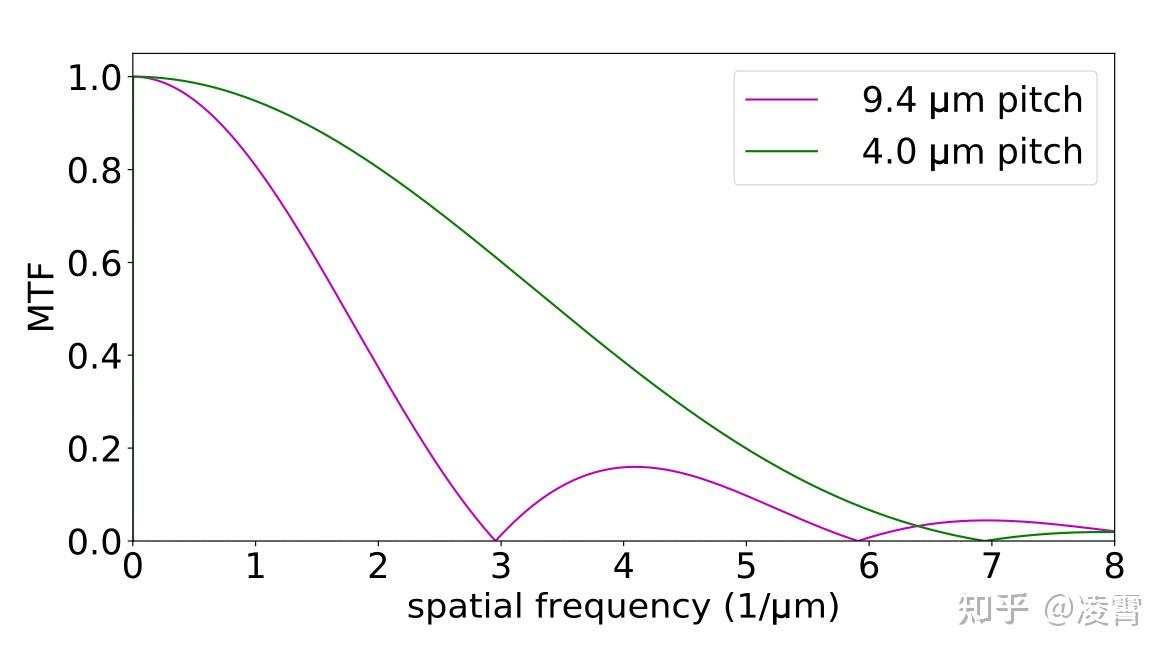
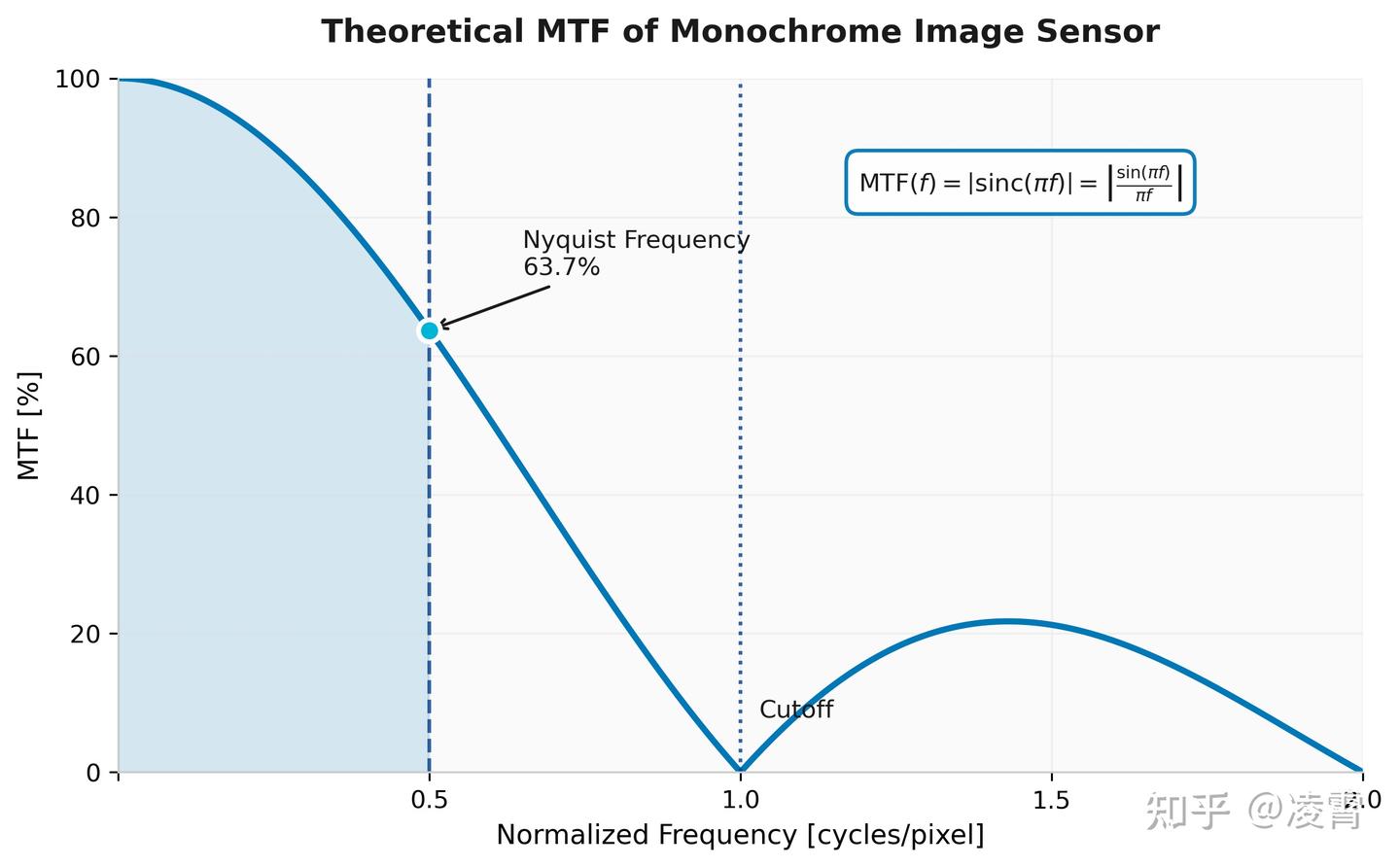
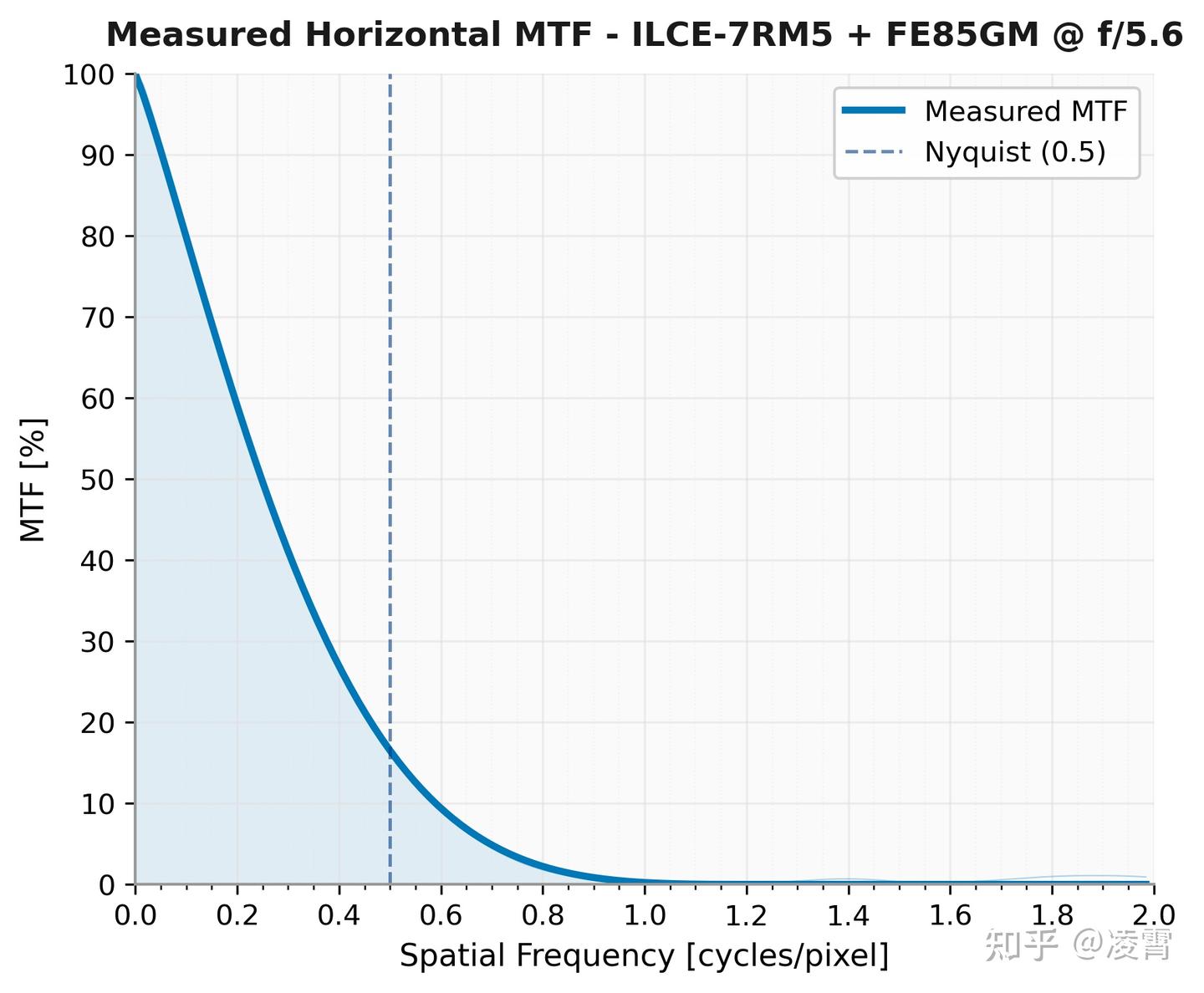
而对于传感器MTF,可以近似地认为每一个像素的MTF都是一致的,所以一般用MTF vs 频率来表示(如下图)[3]:
当然,进一步讨论时,则有必要理解相机成像系统的两个物理上限: 和
的上限,👇下面继续建模。
2. 光学系统的衍射极限
光学成像系统永远无法将一个理想的点光源(物点)完美地再现为一个像点。这种极限是由光的波动性和光路的有限孔径共同决定的。当完全无像差的理想光学系统对点光源成像时,其能量在像平面上的分布并非一个无限小的点,而是一个特定的衍射斑,称为艾里斑。
2.1 艾里斑和瑞利判据
艾里斑的强度分布由一阶贝塞尔函数描述,其中心亮斑(艾里斑)的半径通常以其第一个零点位置来定义:
其中,
:空域中点扩散函数(PSF)的特征描述,直观地反映了该透镜-光圈组合所能分辨的最小点距
:光的波长
:焦距
:入瞳直径 (EPD, Entrance Pupil Diameter)
:N即为光圈F值,常表示为F/#,决定衍射效应的关键参数。
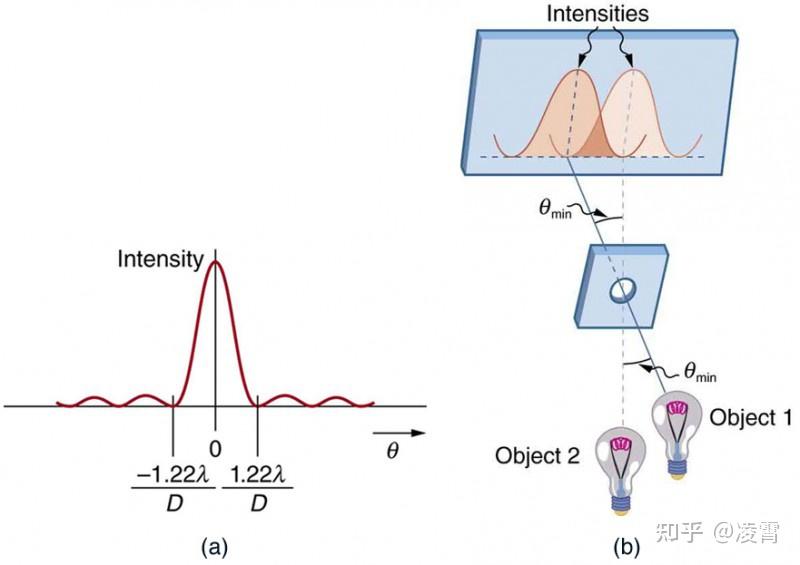
或用角半径表示:
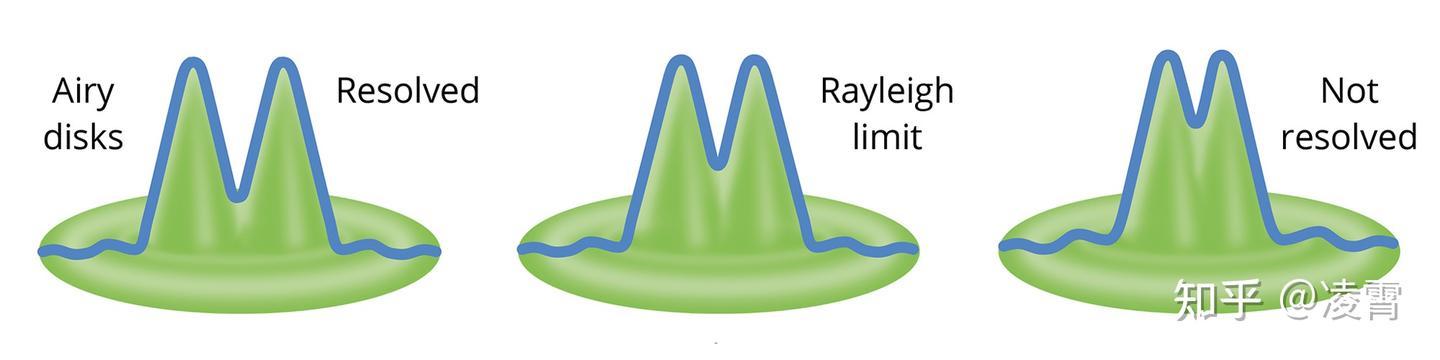
该角半径在物方对应的是最小可分辨角(即瑞利判据),此时两个点的艾里斑恰能分辨,对应下图的中间状态。
下图的表示的是 :
2.2 空间截止频率和衍射极限
衍射效应对系统频率响应的影响,可通过无像差圆孔的衍射极限MTF进行建模。
对于一个无像差、受衍射限制的圆孔光学系统,其 MTF 为:
当 时,MTF = 0。
公式(3)提到过艾里斑的第一暗环半径对应的角半径为
但在空间截止频率推导中,系统对空间频率的传递受限于光瞳函数的自相关带宽。在像差为 0、圆形孔径下,截止频率 对应于系统光瞳最大空间频率通过光的最大频差极限,公式为:
其中 为 光圈(
)。
这是因为:在几何光学近似中,两个点经过孔径衍射,当它们的角度对应的光程差为 λ 时(即干涉条纹消失),对应的空间周期就是极限。
在此频率 下,两个像点不能分辨,像点距离
小于艾里半径
,为
可以看出 和
互为倒数,而且公式(6)看起来与之前的艾里半径公式(2)相似,但缺少了代表第一零点的常数 1.22,因为两个点靠的更近了。
高于 的频率将完全无法被传递(MTF = 0)。综上,衍射极限 MTF 的闭合表达式为:
其中 为径向空间频率。
那瑞利判据所对应的频率又是多少呢?
代入公式 (7) 计算,得到:
也就是说,在瑞利判据的频率下,MTF 只剩下约9%!
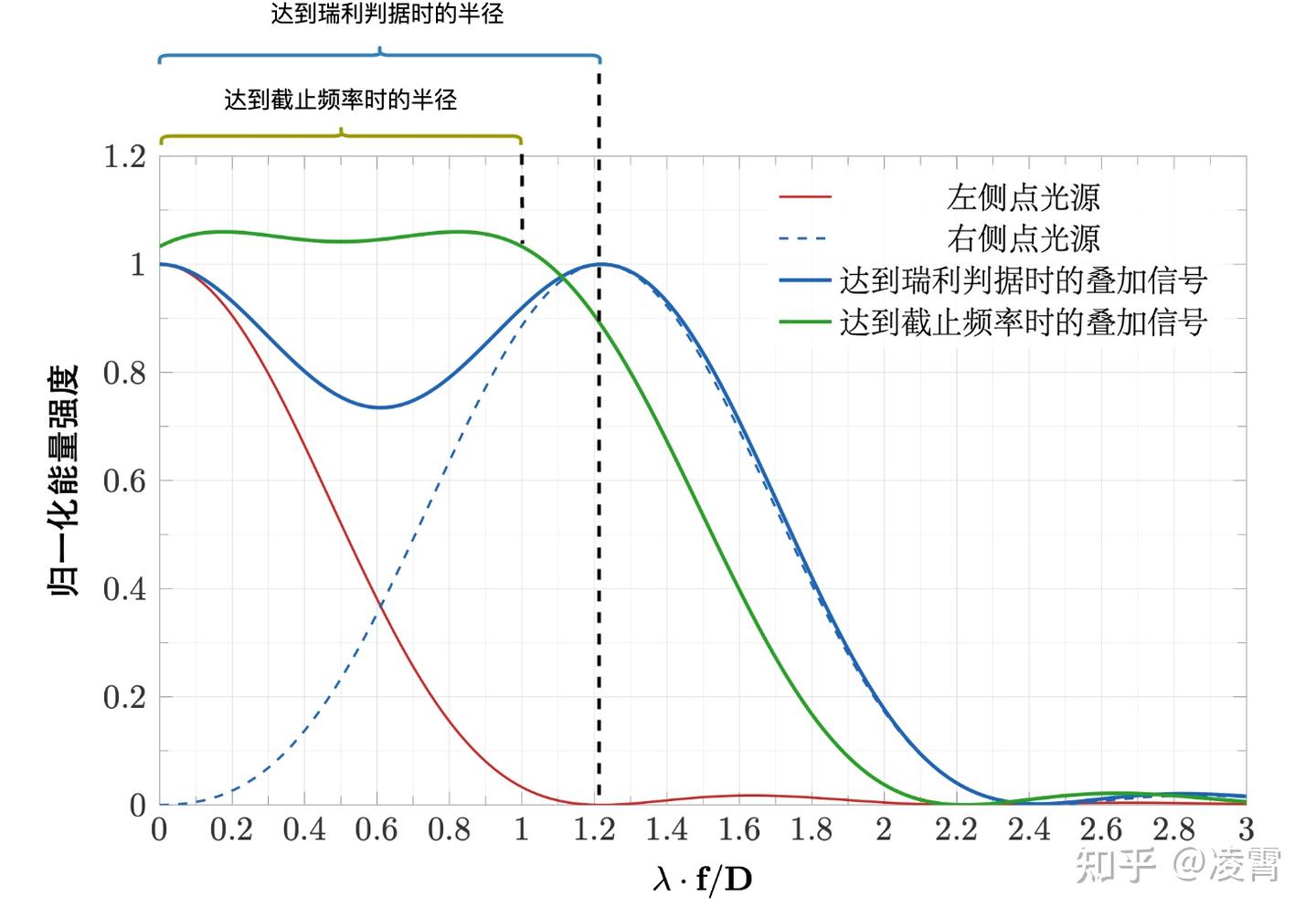
如果做像点距离可视化的话,应该如下图所示。不难看出,随着距离缩小,最终叠加信号就没法分出两个点了。
总结一下原理:
- 点光源成像的艾里斑可以用空域函数 PSF 来描述,艾里半径是对 PSF 的特征描述
- 根据两个艾里斑的位置关系,可算出瑞利判据时对应的艾里半径
- 根据无像差圆孔建模衍射极限 MTF ,可算出截止频率,截止频率达到时 MTF为 0
- 瑞利判据频率对应的 MTF 约为 0.09
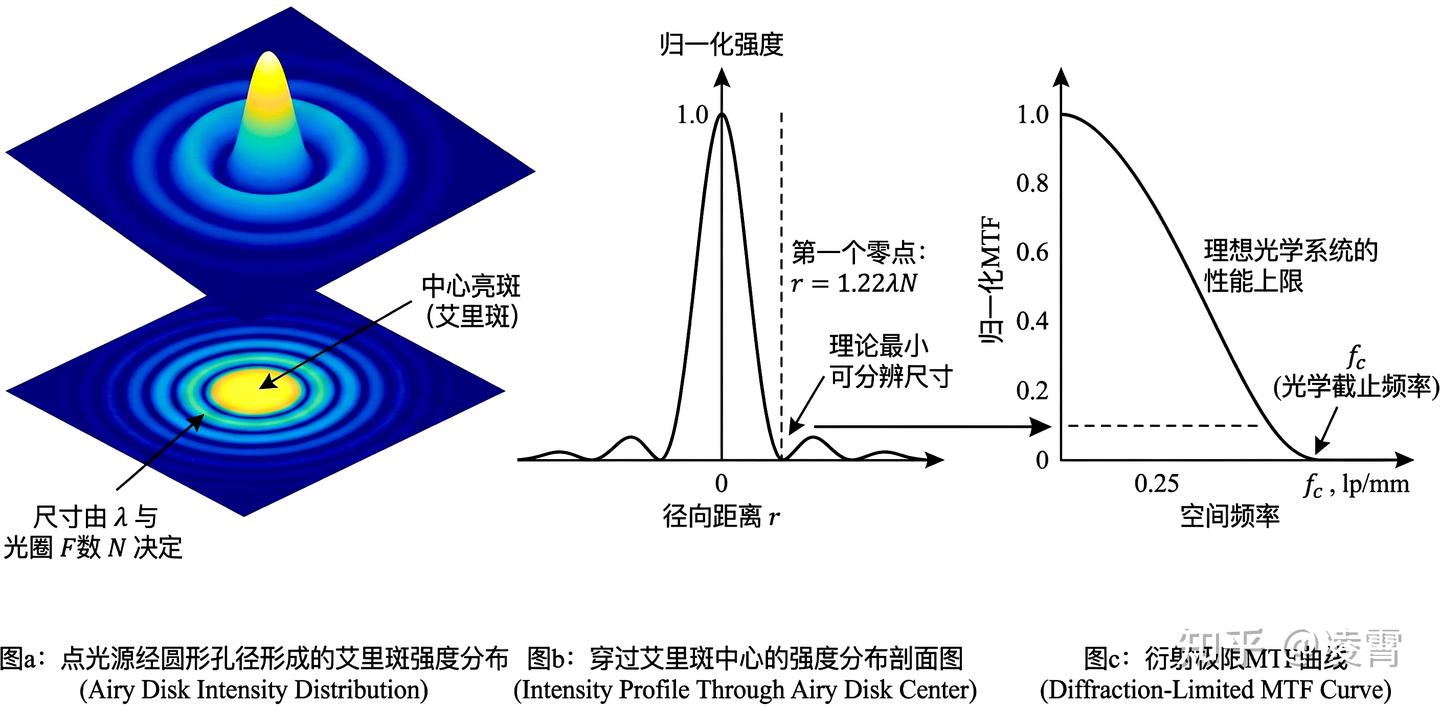
图a(左):点光源经圆形孔径形成的艾里斑强度分布。中心亮斑(艾里斑)的尺寸由光波长与光圈共同决定。 图b(中):穿过艾里斑中心的强度分布剖面图,清晰地标明了第一个零点位置,即理论上的最小可分辨细节尺寸。 图c(右):衍射极限MTF曲线。随着空间频率的增加,系统的对比度传递能力平滑下降,最终在光学截止频率 处衰减至零。这条曲线是理想光学系统的性能上限。
下面有几个推论:
- 如果一个镜头的 PSF 就是理想的艾里斑,那么该镜头的像差等效为 0,Strehl ratio = 1,必然是达到衍射极限的,当然这个镜头在现实中不存在,见本章开头第一句话。
- 如果存在几何像差(球差、彗差等),点光源的像会变得比艾里斑更大、更弥散,能量更分散。此时镜头的 PSF 劣于艾里斑,其 MTF 低于衍射极限 MTF,我们说该镜头没有达到衍射极限。
- 如果一个镜头接近衍射极限,意味着设计已经几近完美,任何像差的影响都小于衍射的影响(WRMS < λ/14,Strehl Ratio > 0.8)。这种情况常见于光刻镜头、显微镜、天文望远镜、稍微收一两档光圈的摄影牛头、收了很多档光圈的摄影狗头。
2.3 实操演示:镜头的衍射极限
既然对于确定的光圈 ,根据公式(5),截止频率也是确定的。那么对于一个光圈F5的镜头,截止频率就是 363lp/mm 了吗?我们来验证一下。
先手搓一个双高斯结构,参数为 100mm F5 的镜头:
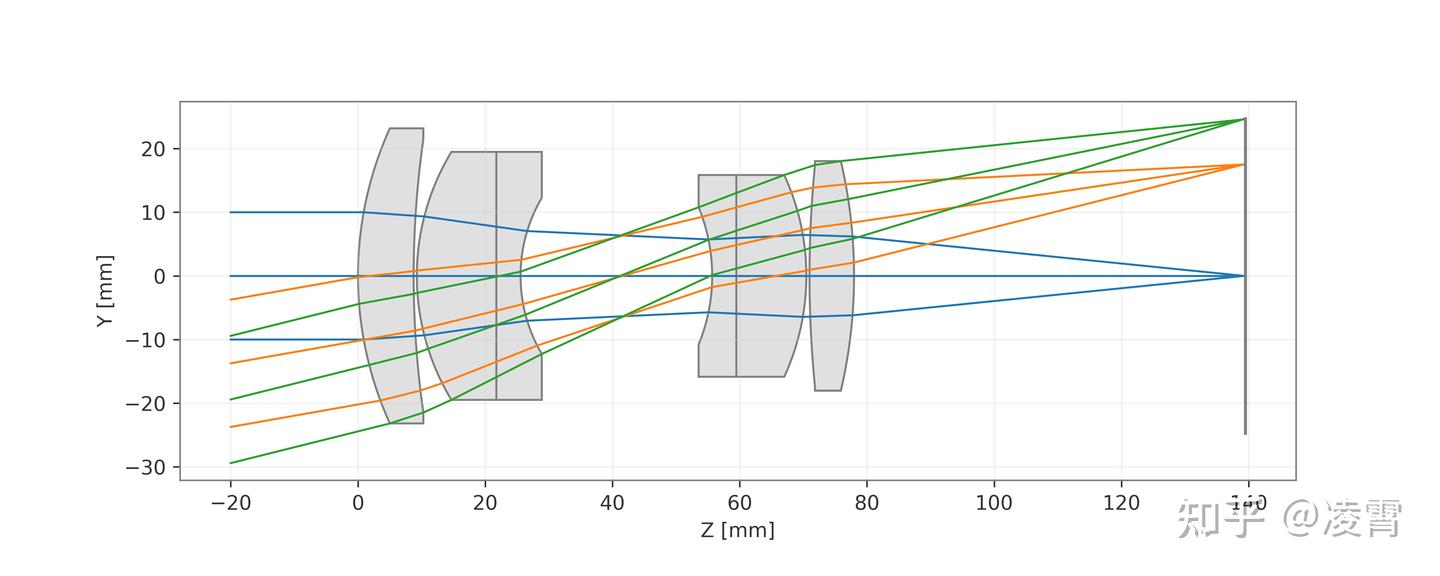
把该镜头的 PSF 做3D可视化就是这样:
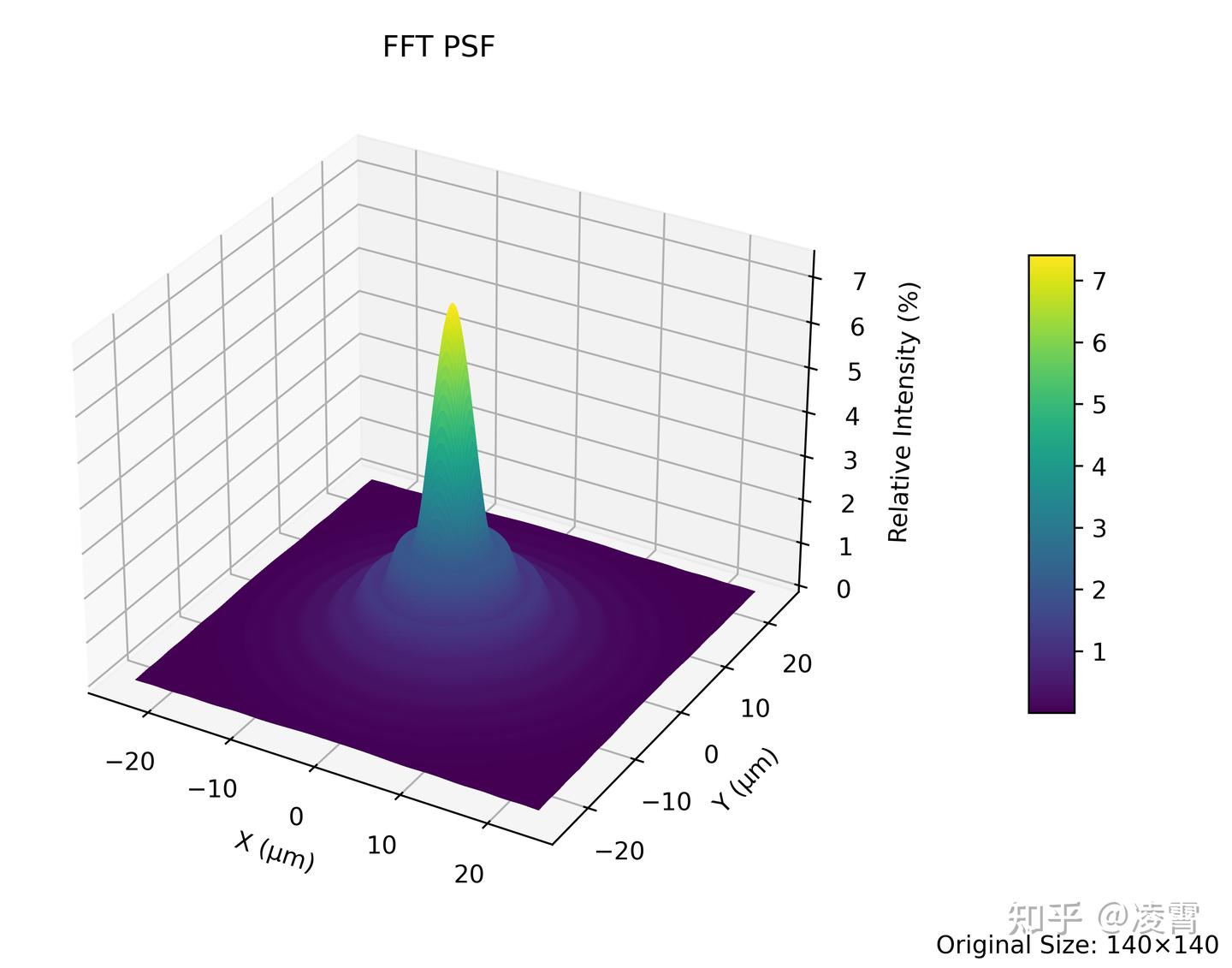
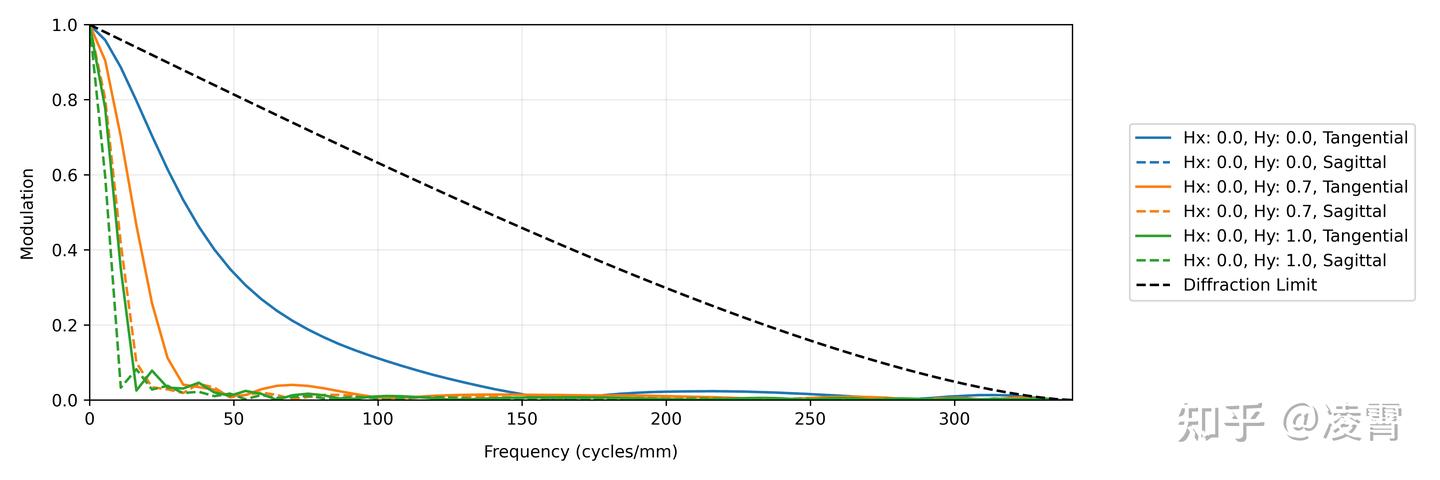
然后计算出 FFT MTF,这里为了省时间就不算惠更斯 MTF 了。
可以看到截止频率确实在 363lp/mm 附近,但是可惜这个镜头太拉,此时以像差为主导,实际 MTF 离衍射极限还很远。
把光圈收到 F8 看看,中心不错,边缘还是差了点,此时把 F8代入 约等于227,作出来的图当中,曲线与 X 轴的交点也确实如此。
收到 F16,中心贴着衍射极限了,边缘改善显著,此时 。
后面就以这个镜头为例,推测一下它搭配具体的传感器会有怎样的表现,但是在此之前,我们先需要对传感器进行建模。下面快进到信号与系统👇
3. 采样定理与传感器的奈奎斯特极限
数字传感器将连续的图像信号离散化为像素阵列,这一过程受制于采样定理。
3.1 奈奎斯特频率的定义
对于一个像素间距为 的传感器阵列,其采样频率为
。根据奈奎斯特-香农采样定理,为了无失真地重建原始信号,采样频率必须至少是信号最高频率的两倍:
由此我们得到传感器能够无混叠记录的最高空间频率——奈奎斯特频率。
3.2 理想传感器的MTF建模
传感器像素并非理想的点,其感光单元通常占据一定物理面积,这本身会引入低通滤波效应。对于具有矩形感光单元(尺寸为 ,Fill Factor 100%, 可设定
,
为像素间距)的单色传感器,其在某一方向(例如x轴方向)上的调制传递函数(MTF)可近似建模为一维的sinc函数:
然而实际上,方形像素的频率响应当是二维且各向异性的,需使用二维模型 来描述,这里为了计算简便就不作深入讨论。
通过作图可以把这个模型可视化:
针对奈奎斯特频率的进一步说明:
- 方形传感器主轴的奈奎斯特频率为
;而对角线方向的奈奎斯特频率更高,约为
。
- 在主轴
处,一维近似模型给出的MTF值约为
。
- 即使传感器本身在
混叠的示意图如下:
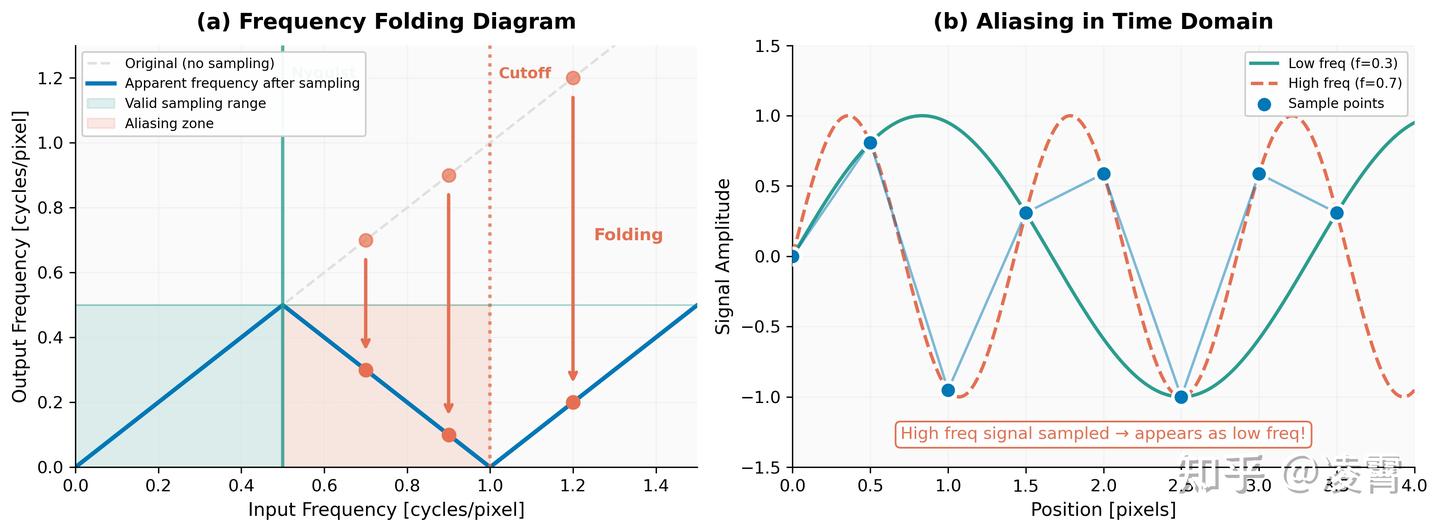
(a) 超过奈奎斯特极限(0.5 cycles/pixel)的物体频率被折叠回有效频率范围。灰色虚线表示无采样时的原始频率,蓝色实线表示采样后的表观频率。绿色区域为有效采样范围(0–0.5 cycles/pixel),橙色区域为主要混叠区(0.5–1.0 cycles/pixel)。(b) 时域混叠演示。高频信号(f = 0.7 cycles/pixel,橙色虚线)与低频信号(f = 0.3 cycles/pixel,绿色实线)在离散采样点处产生相同的采样值,说明高频信息在采样后被误识别为低频信息。
根据公式(12),如果像素间距确定,那么 也确定。例如,对于 3.76um 像素的传感器(对应全画幅61mp)可以画出其 MTF 图:
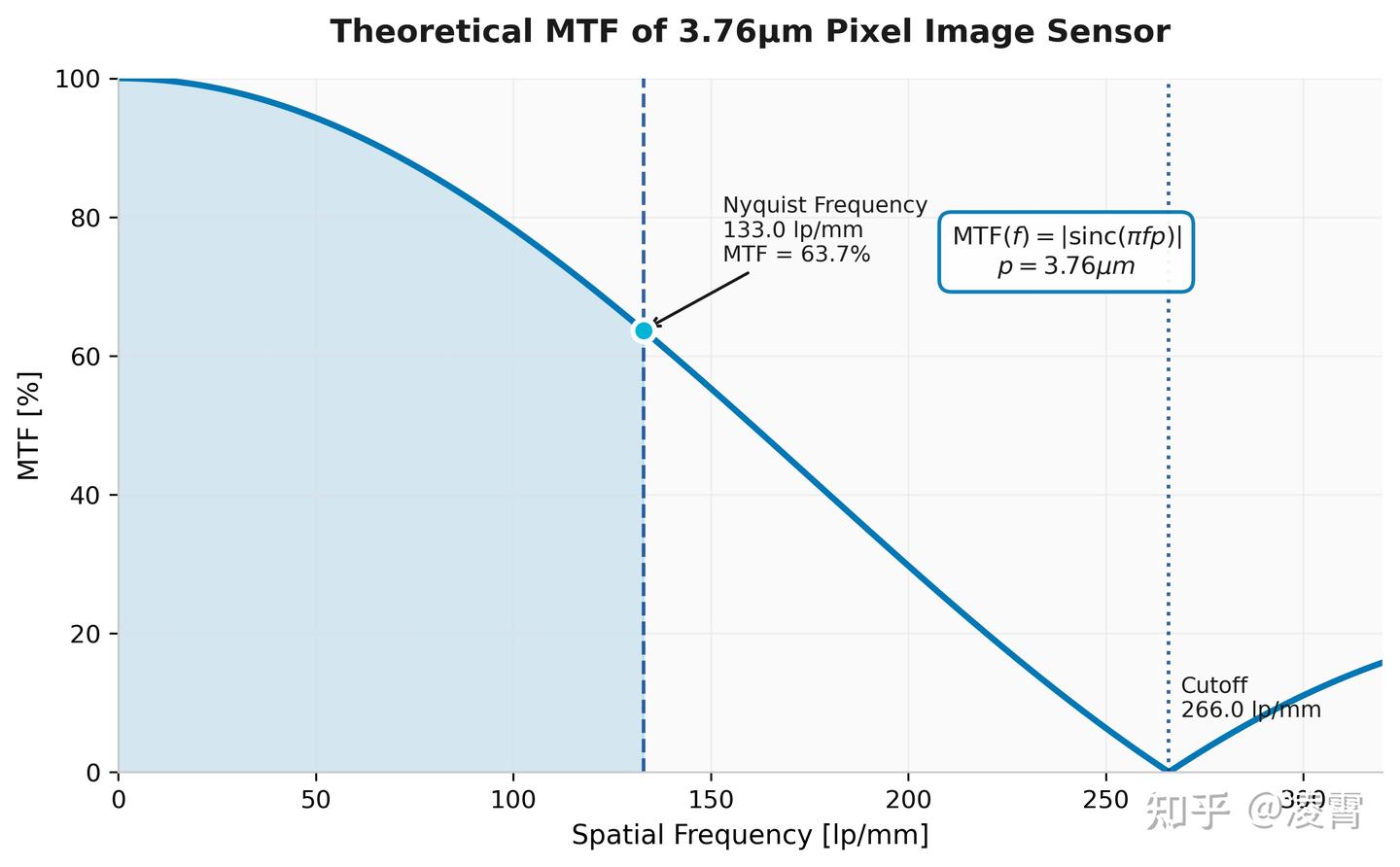
但实际值可能会低于这个理论值,影响因素比较多,例如:
- FSI 和 BSI
- 光的波长
- EPI 的厚度
- DTI 的设计
- CFA 的设计
4. 传感器MTF的测量与建模
MTF 的测量方法其实非常多,土一点的方法是直接肉眼看标板读数或者计算对比度,邪修一点的话在实验室环境搞定点光源然后直接测量 PSF。但最惯用的还是 ISO12233 当中描述的方法[4]。
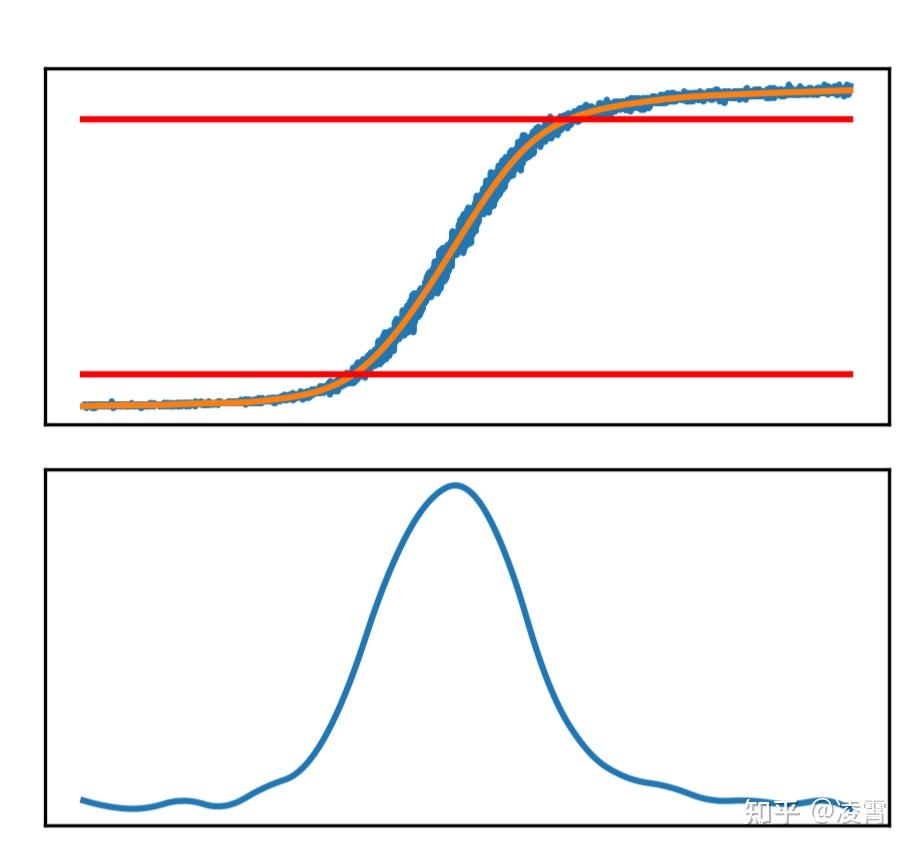
MTF 一般按照 ISO12233 中描述的刃边法进行测量。简单说只要一个黑白的斜边,经过微分和 FFT 就能算出 SFR。当然这个测出来的值是 ,要扣除
,才能得到
。[5] [6]
那按照这个思路,如果我给机身装上一个像差贡献小的、接近衍射极限的镜头,根据公式(7)可得 ,再把少量像差残差什么的一建模,这不就能倒推出
了?
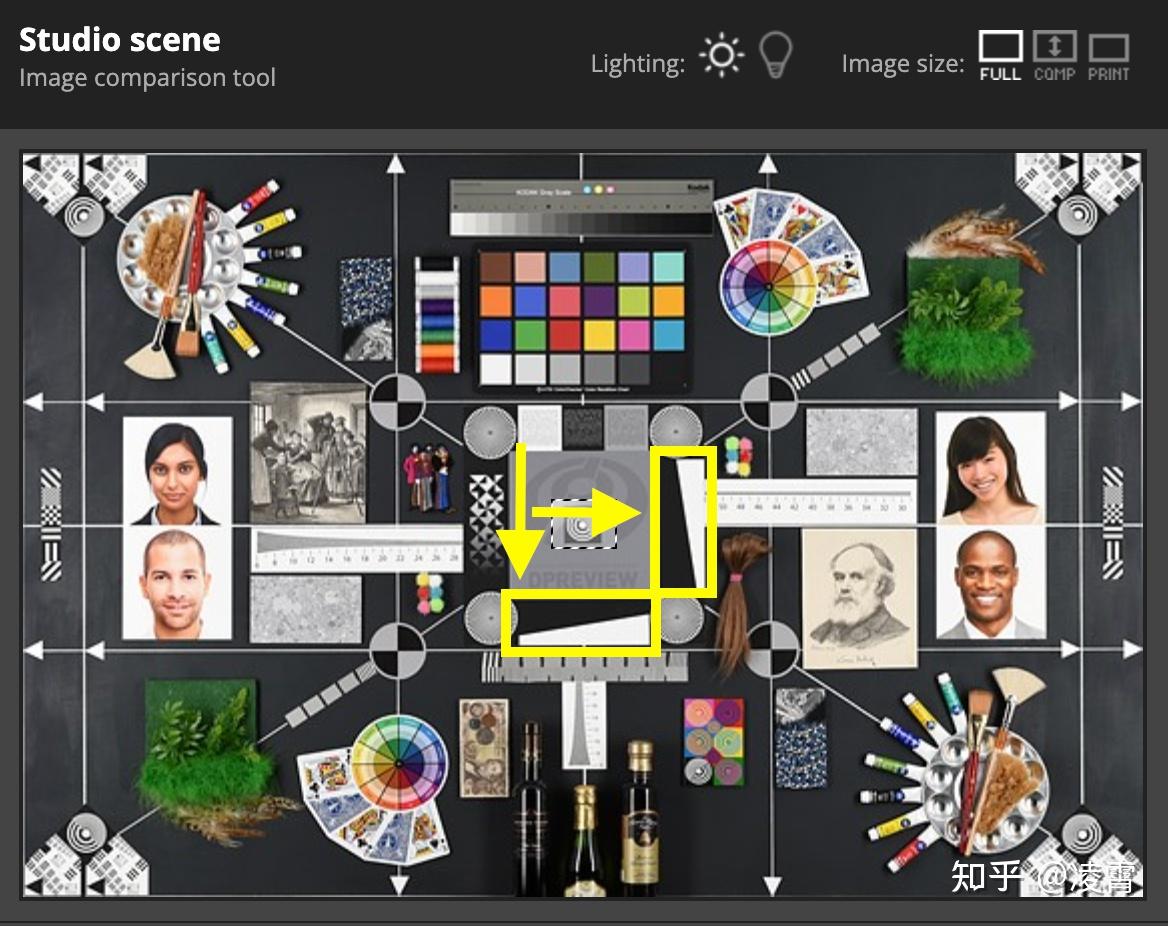
没错,事实上 DPReview 的 Studio Comparison 也就是这么干的——用牛头收几档光圈来测机身。而且测试图中心的周围恰好有一个水平斜边一个垂直斜边 ,这就有意思了,那我们直接下载完了跑一遍 SFR 不就完事了。
4.1 基本思想和数学模型
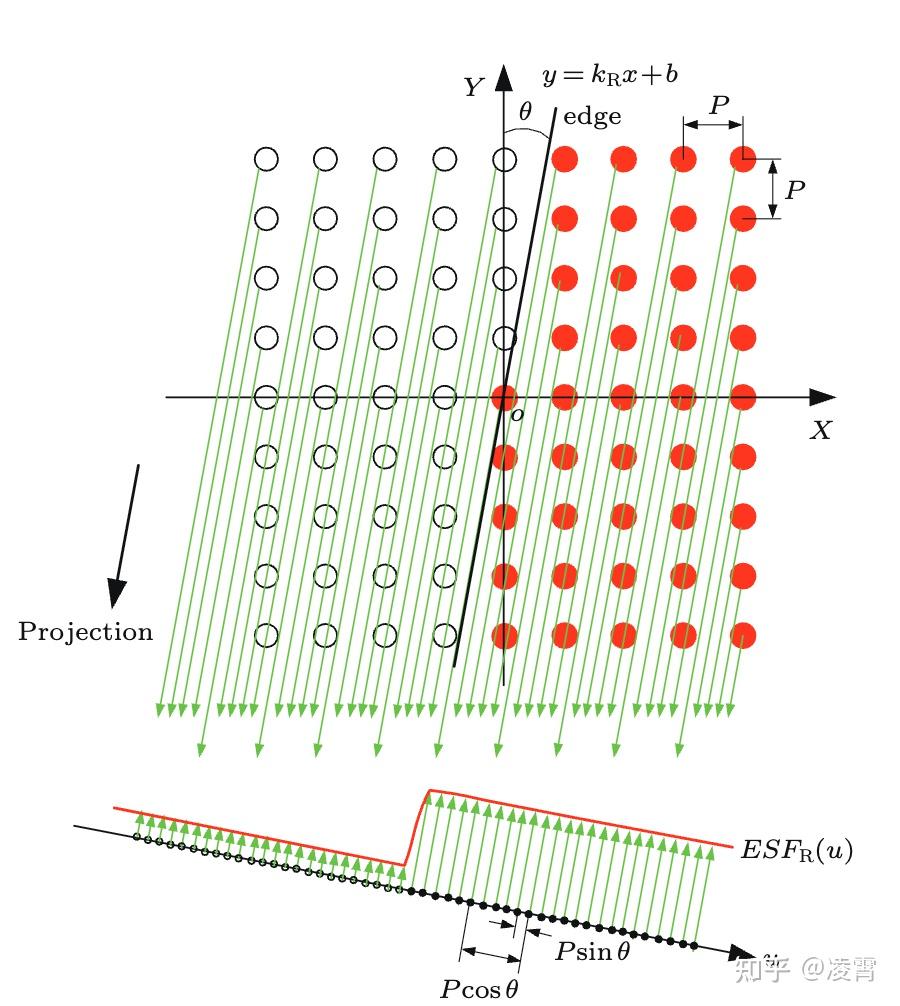
考虑一个理想阶跃边缘经过光学系统成像后在传感器上的强度分布。设边缘与传感器行/列方向存在微小倾角 (通常
),则沿垂直于边缘方向的连续强度分布可建模为阶跃函数与 PSF 的卷积:
其中 为垂直于边缘的空间坐标。由于传感器在
方向上以像素间距
进行离散采样,实际获取的数字图像可表示为:
该离散序列即为 ESF。对 ESF 求导可得线扩散函数 LSF:
LSF 的傅里叶变换是复数,取模即为 MTF:
实际算法实现时,直接对离散 ESF 进行数值微分与 FFT 变换,再通过频域归一化得到 SFR 曲线。
4.2 算法实现
步骤 1:定位,用 Canny 算子检测斜边,通过线性回归拟合边缘直线方程 。计算每个像素中心到边缘线的距离
,将其投影到垂直于边缘的一维坐标系:
步骤 2:超采样重建 ESF,将所有像素按投影距离分箱(binning),箱宽通常取 1⁄4 像素宽度以实现 4 倍超采样。对每个箱内像素值加权平均,得到高分辨率的离散 ESF 序列:
其中 为超采样间隔。
步骤 3:对 ESF 进行求导:
为抑制 FFT 的频谱泄漏,需对 LSF 加 Hann 或 Hamming 窗函数:
步骤 4:对 LSF 进行 FFT,计算模值并归一化至零频分量:
当然这个 ESF 曲线是要做投影才能得到的:
Note:由于 Bayer CFA 的 SFR 计算一般不会做反拜耳,要么1)计算单独通道,此时Nyq. Freq会变成1/4p(Deegan et al., 2024);或者2)计算 WB-balanced SFR。这里用后者,具体实现这里就不赘述了,因为写出来又是一篇大文章,后面再填坑😭。[7]
4.3 建模实操:以 A7R5 为例
以 A7R5 为例,下载RAW之后使用 Canny 算子识别图像中的斜边边缘,提取 ESF 之后求导得到 LSF ,再经过 FFT 之后就能把 LSF 在频域的模转换成 MTF,最后进行可视化就是下面这样。
为了方便这里只测水平的,如果机型带有各向异性的 OLPF 建议H、V两个方向都要计算(水平垂直方向的低通强度不同)。
再根据公式(7)建模,得出 拟合值(蓝色曲线):
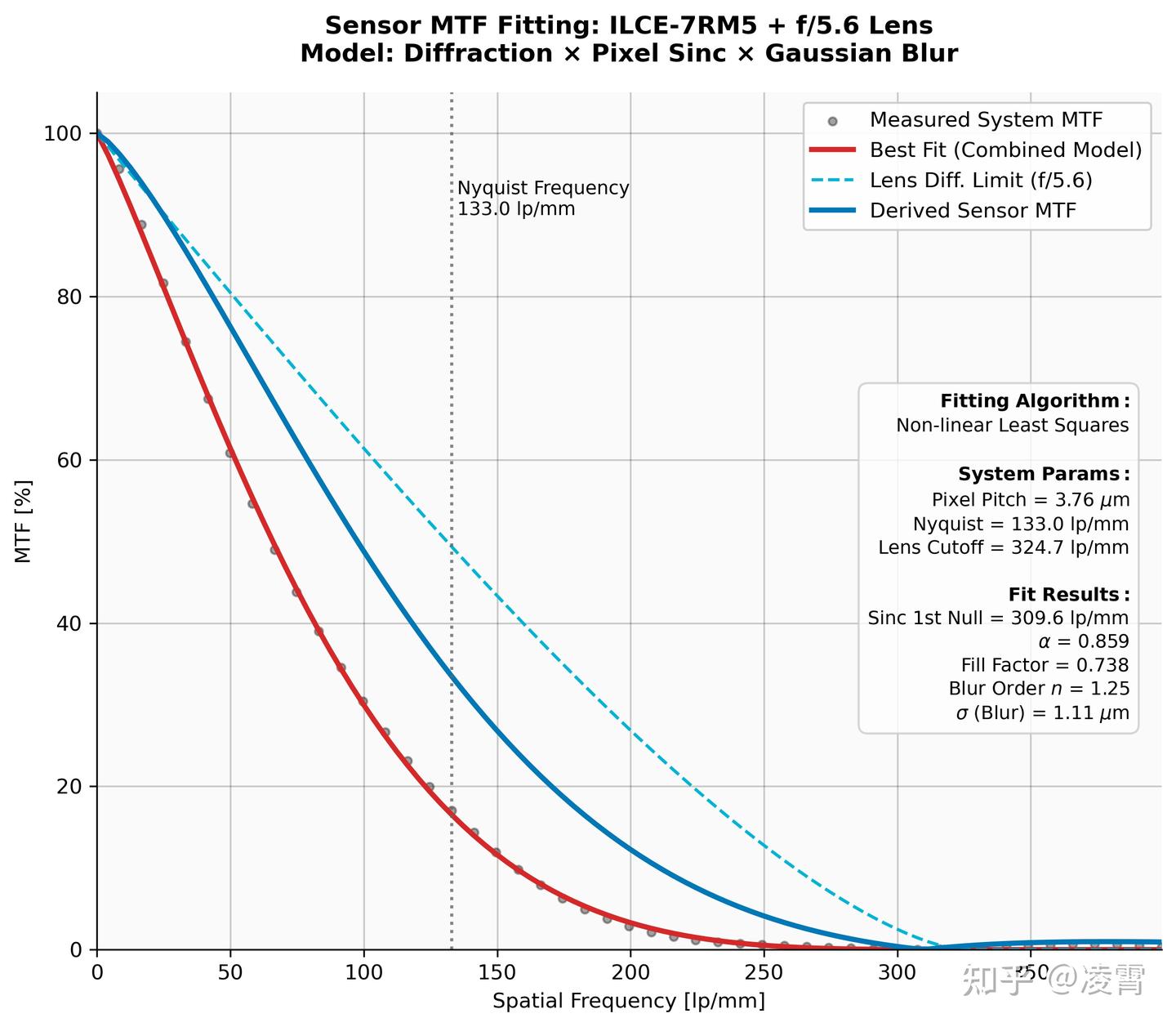
有人一看,3.76um的截止频率不应该是266lp/mm吗?你这个算出来的截止频率都300多了,居然比之前的理论值还高,肯定是建模错了!!
其实不一定,之前建模的是100%填充率方形像素的主轴MTF,这就隐含了一个强假设:像素的有效积分孔径 等于像素间距,即
。
然而,现实中会有很多种因素导致 ,例如感光单元未完全填充、像素间的DTI设计或其他电路结构等。这些因素会减小像素的有效积分孔径,进而使得
超过模型理论值。
一般厂商为了感光效率,普遍采用无隙微透镜来变相增加 ,当然这样会略微降低
。但是有的厂商为了锐度会反其道而行之,把微透镜间隙改大,而代价就是QE更低、更容易产生混叠。 Nikon Z7和GFX 50S就被报告过这种现象[8] [9]。
经 @姜尧耕(渔樵耕牍) 指正A7R5 没有改微透镜,所以这里的bug应该出在没法把第一零点拟合准。他的这一篇也非常生动地分析了尼康改微透镜的操作:论尼康虚假的锐利:关于混叠、填充率与孔径效应
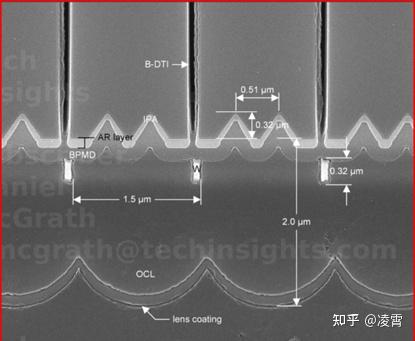
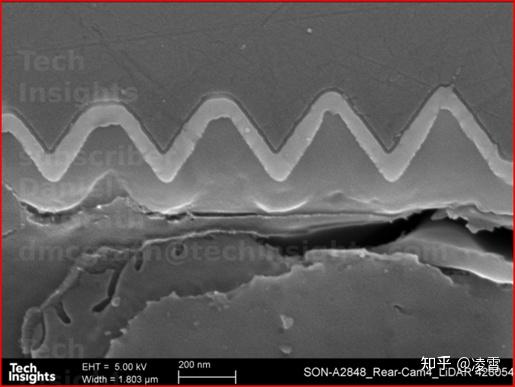
同时他有提到“不过z7因为某些奇怪的原因选择把diffractors干掉”,如果diffractors指的是索尼半导体2017年在Nature神刊SR[10]上提出的衍射型倒金字塔阵列 (IPA, Inverted Pyramid Array) 的话,这句话并不准确。因为目前还没见到大幅面消费级相机的CIS采用IPA,一般是监控安防、自动驾驶和AR/MR产品这些需要近红外灵敏度的在用。
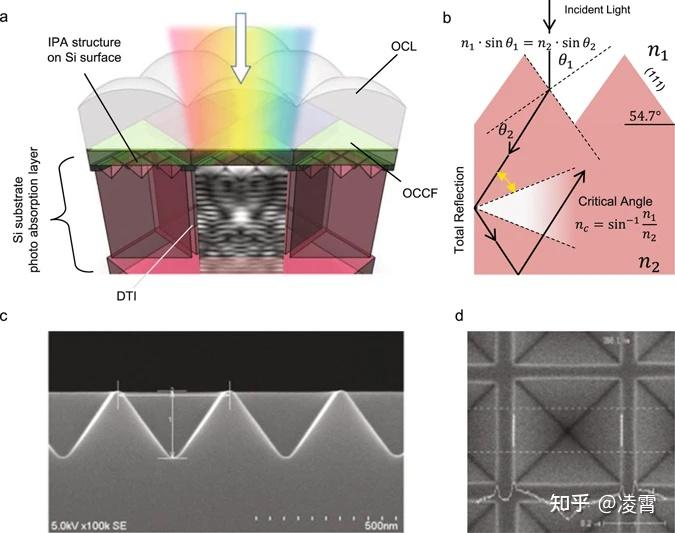
发现存在IPA的例子:(1)Apple Vision Pro上用来承担眼动追踪的IR CIS;(2)iPhone 15PM上的LiDAR
5. 定量判断:怎么样才算“喂饱”?
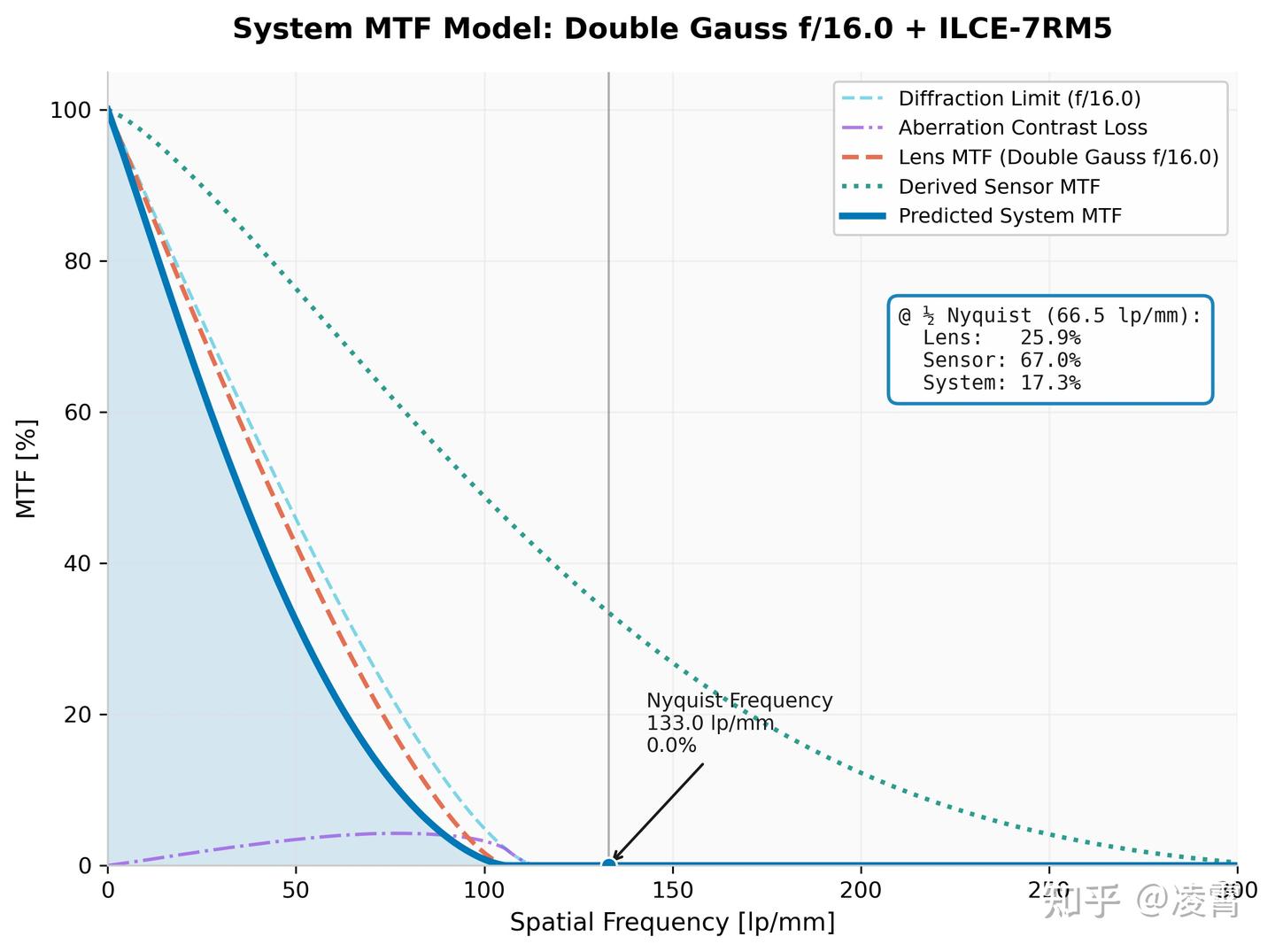
既然现在 也推出来了,我们还是拿 2.3 当中那支双高斯镜头为例,看看它能不能喂饱 A7R5:
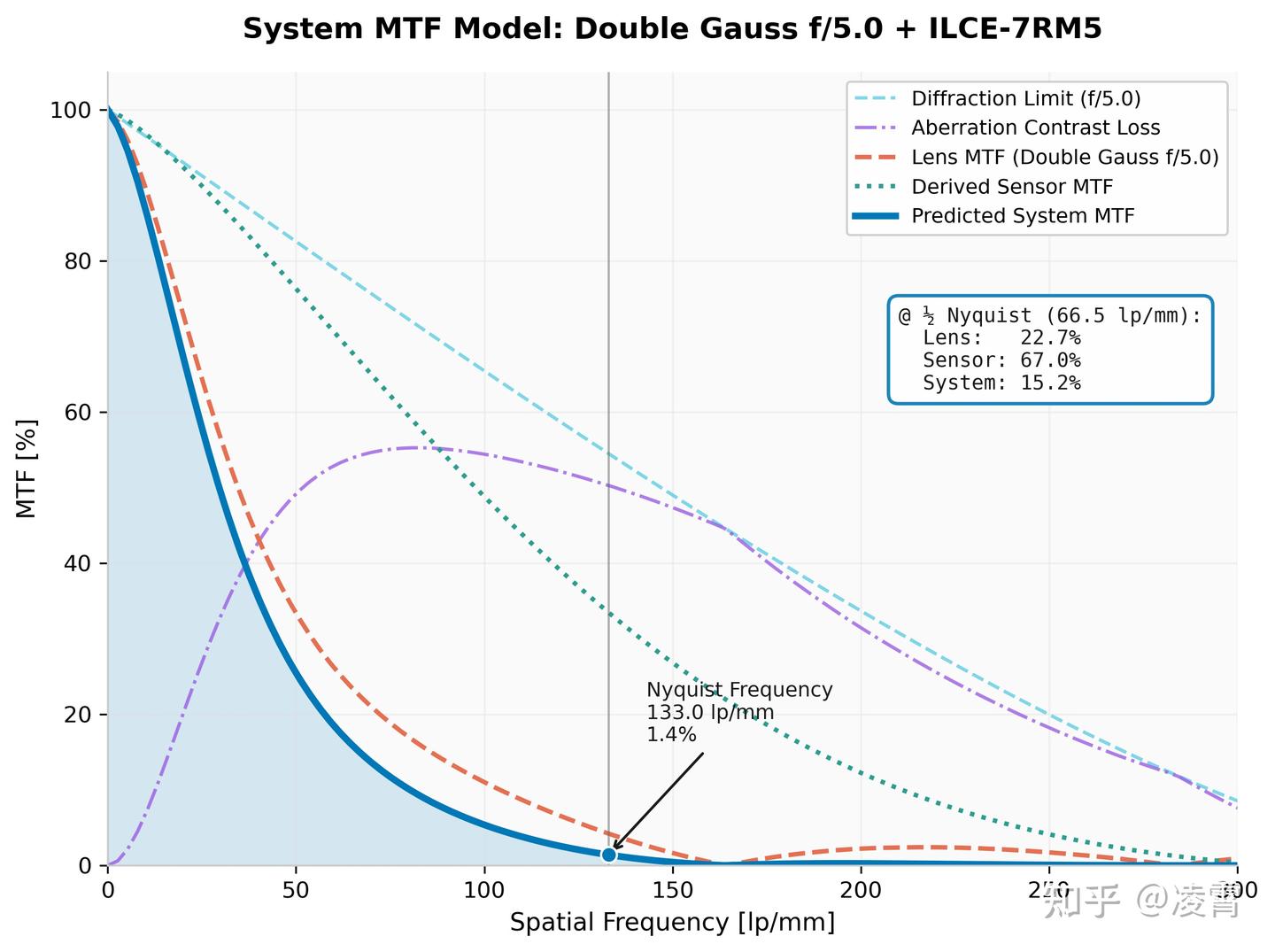
对图例的进一步说明:
- Diffraction Limit (青色虚线 - 衍射极限)
- 光学系统的物理天花板。基于光圈计算的理论极限。代表完美镜头在没有像差的情况下,仅受光波动性限制的最高MTF。
- Aberration Contrast Loss (紫色点划线 - 像差贡献)
- 镜头的像差贡献。反映了球差、色差等几何像差对画质的影响。曲线越接近 0%,代表镜头设计越接近理想状态。
- Lens MTF (橙色虚线 - 实际镜头 MTF)
- 镜头的 MTF(衍射 + 像差),通过 FFT 计算得出。
- Derived Sensor MTF (青绿色点状线 - 传感器 MTF)
- 传感器 MTF。从 A7R5 实测数据中通过非线性最小二乘拟合出来的分量。综合了像素填充因子(Fill Factor/Sinc 响应)和系统模糊的影响。
- Predicted System MTF (蓝色实线 - 系统总 MTF)
- 最终系统成像表现的预测值。
目测喂不饱!因为它在奈奎斯特频率处的 只有 0.014!在1/2奈奎斯特频率处也只有0.152!这还是视场中心,边缘就更不用说了!
没错,这就属于光学受限 (Optics Limited) 情况(如下图)。
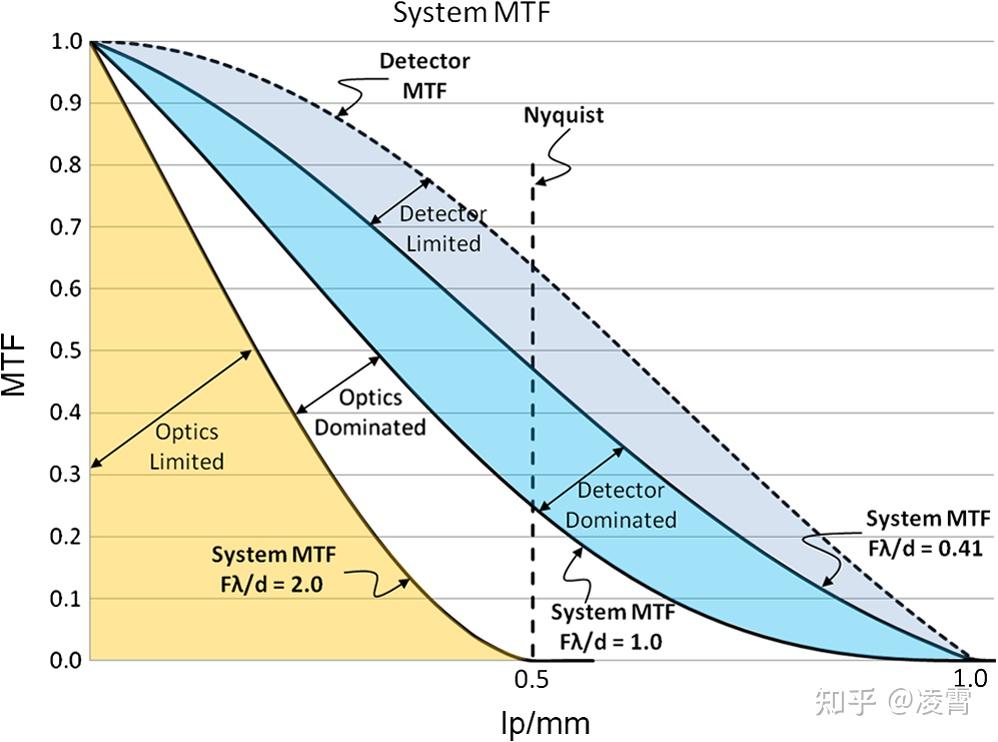
Lohrmann et al. (2013) 详细介绍了利用 来划分传感器和镜头的匹配情况,实际建模中,像差导致的模糊可以等效为一个更大的
。
其中
:光学系统的
数
:波长
:像元尺寸
| 匹配情况 | 判定规则 (Fλ/d) | 描述 |
|---|---|---|
| 光学受限区 (Optics Limited) | Fλ/d≥2.0 | 光学系统的截止频率位于探测器的奈奎斯特频率处。此时系统的空间分辨率受到光学衍射的极限限制。 |
| 光学主导区 (Optics Dominated) | 1.0λ/d<2.0 | 介于衍射极限与探测器截止频率匹配点之间。在该区域内,光学系统的性能变化对系统整体 MTF 的影响比探测器更大。 |
| 探测器主导区 (Detector Dominated) | 0.41λ/d≤1.0 | 光学衍射斑大小在像元尺寸的 1 到 2.44 倍之间。探测器的参数变化对系统整体 MTF 起主导作用。 |
| 探测器受限区 (Detector Limited) | Fλ/d≤0.41 | 光学衍射斑大小等于或小于像元尺寸。此时探测器尺寸是限制分辨率的主要因素。 |
那么继续收光圈到F11会怎么样呢?
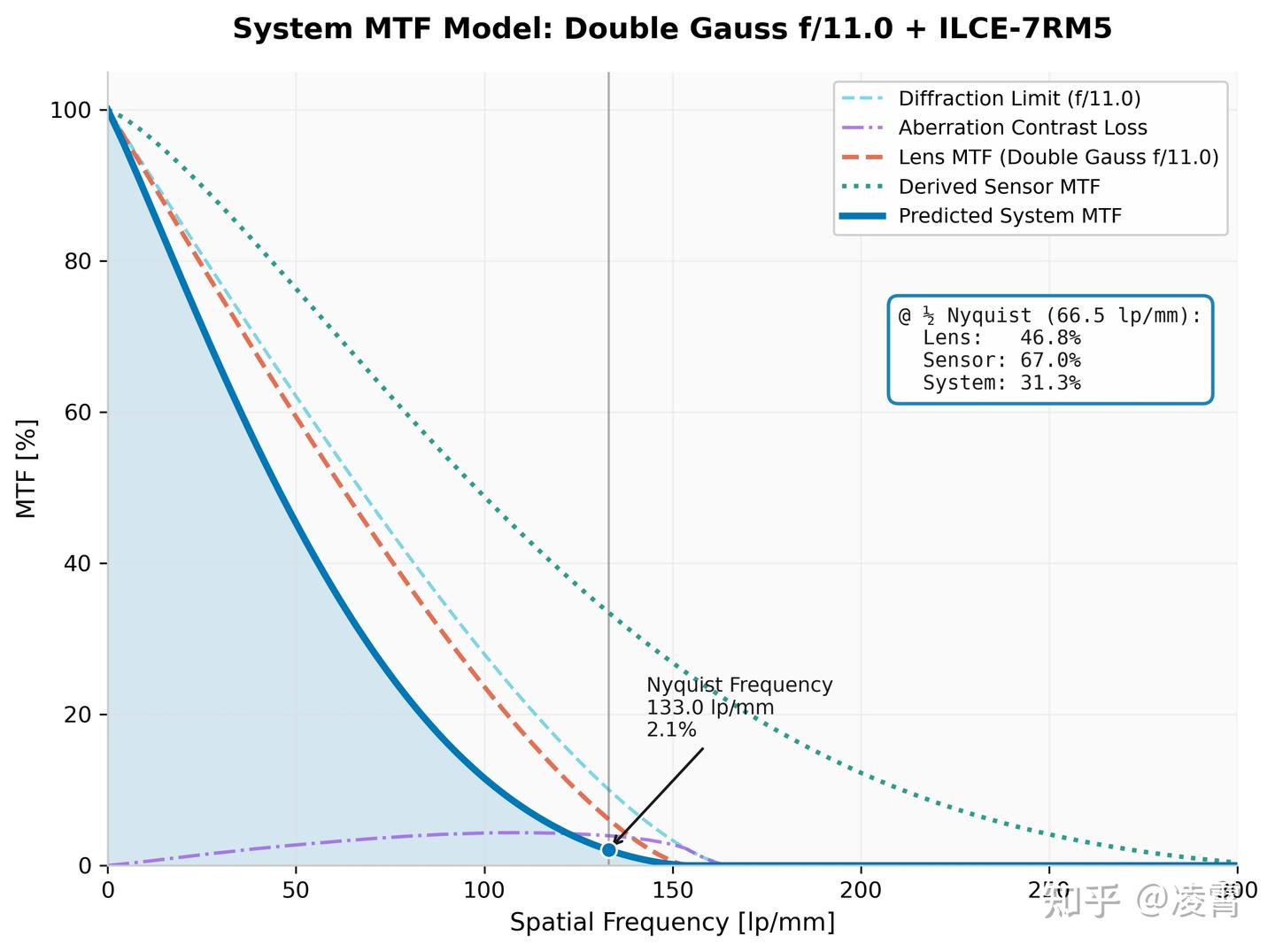
此时镜头的像差迅速减少,计算得 ,考虑到有像差贡献,实际值会大于1.61,此时系统介于 Optics Dominated 和 Optics Limited 之间,可以认为镜头不太能喂饱。
值得注意的是,此时 1/2 奈奎斯特频率处 约为0.47,刚好差不多算MTF50。但是
就只有0.31了,对于要求稍高一点的人来说,这个结果其实并不太理想。
所以经验主义中 “看镜头的 MTF50有没有满足传感器的1/2 奈奎斯特频率” 实质上是一个很低的标准,可能镜头刚好满足了,但是实际表现并不好。
下面继续收到 F16,这下撞了衍射墙,系统彻底变成 Optics Limited,镜头完全不能喂饱机身了。
总结一下:
- 演示搓的这个镜头烂泥扶不上墙,放在6100万像素的机身上全开光圈中心都够呛,缩光圈又撞衍射墙,总之就是喂不饱。
- 看镜头的 MTF50有没有满足传感器的1/2 奈奎斯特频率这个方法其实很保守,不适合要求高的玩家,激进一点的可以考虑2/3奈奎斯特频率。
- 狗头之所以是狗头,不仅仅是因为全开光圈不能喂饱机身,而是缩了光圈会撞衍射墙,一样喂不饱。
6.示例:用镜头仿真来建模
基于上述方法,如果有光学大佬的仿真数据,配合自己机身的数据,就可以直接建模该镜头在自己机身上表现如何了。
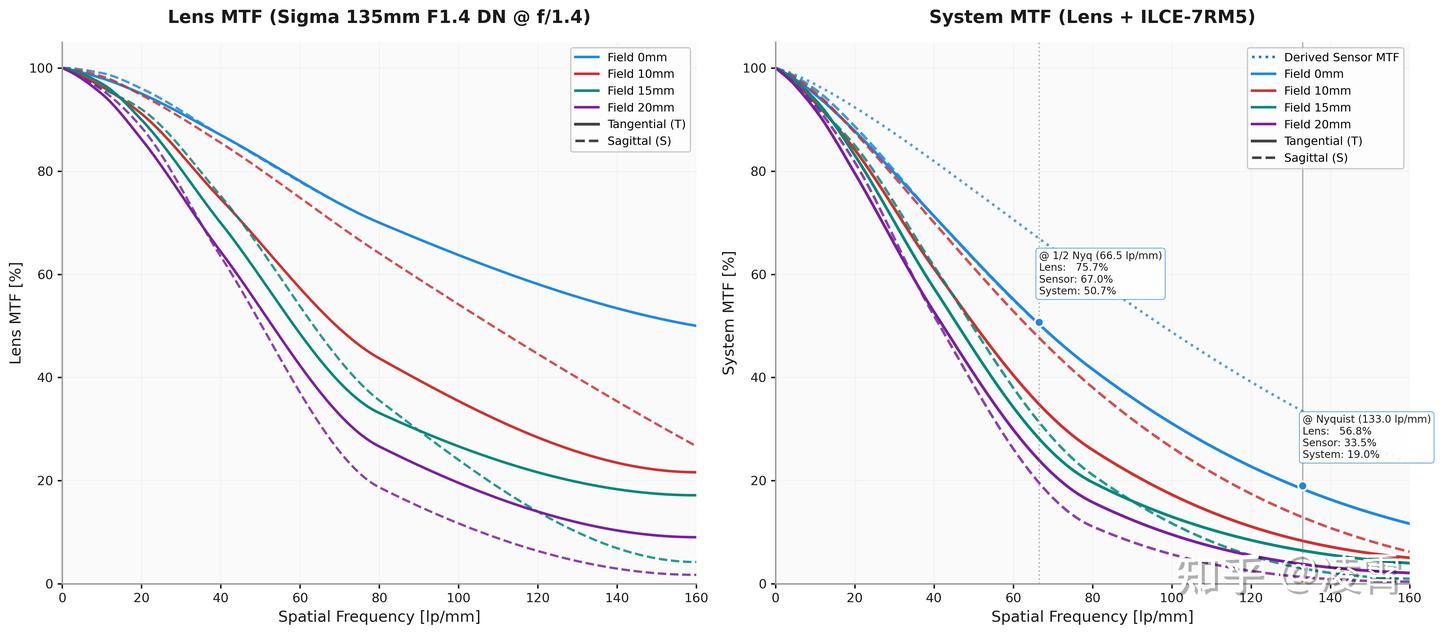
示例这里我选了 Sigma 135 F1.4 DN Art,数据来自 @Anvcor
由于原始 MTF 只画到了 160lp/mm,所以我X轴也只能画到这么多,数据基于图像上直接取点+中间插值。
可以看到中心十分强悍,即使在 Nyq. Freq. 也能有0.57以上的反差。性能一直到15mm视场都是十分强悍的。
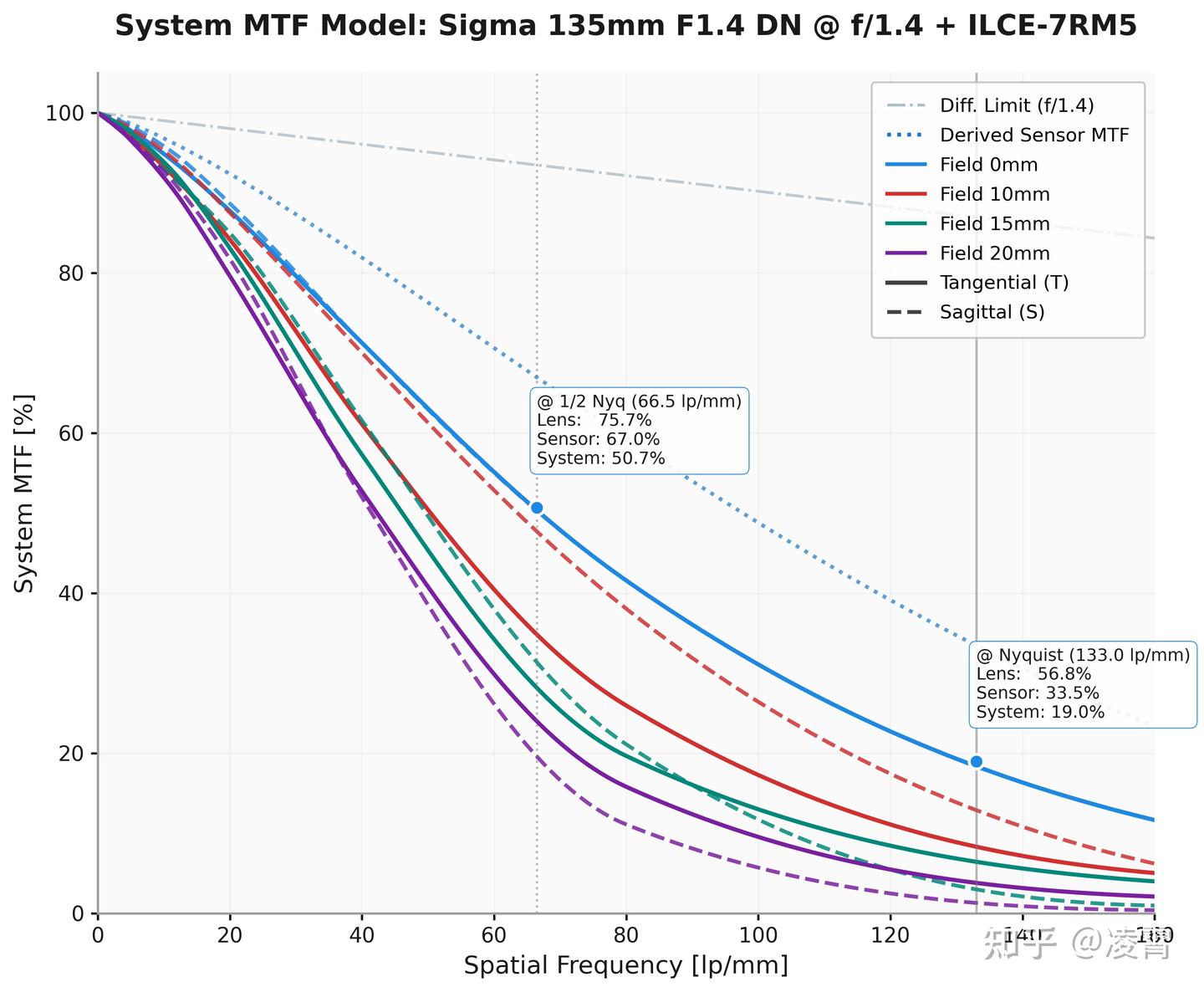
结合 来看,果然中心直接把6100万像素干爆了:
7. 结论
镜头能否喂饱相机本质上是一个级联系统的信息传递问题,而非单一的镜头性能指标。
通过对光学衍射极限与传感器奈奎斯特极限的定量分析发现:
- 当
时,系统进入光学受限区,此时即便传感器像素间距p再小,系统分辨率也极大受限于衍射物理上限。
- 经验主义上“MTF50 满足 1⁄2 奈奎斯特频率”是较为保守的标准。通过对 A7R5 的实测建模发现,高性能镜头往往在奈奎斯特频率处仍能维持较高对比度。
附录:术语表
| 中文名称 | 英文名称 | 缩写 | 定义 |
|---|---|---|---|
| 调制传递函数 | Modulation Transfer Function | MTF | 表征成像系统对不同空间频率成分对比度的还原能力。 |
| 点扩散函数 | Point Spread Function | PSF | 理想点光源经光学系统后的光强分布,是MTF的空域表现。 |
| 彩色滤光片阵列 | Color Filter Array | CFA | 覆盖在传感器像素上的马赛克滤镜(如Bayer阵列),决定色彩采样方式。 |
| 空间频率 | Spatial Frequency | - | 单位长度内的周期数,单位通常为线对/毫米 (lp/mm)。 |
| 艾里斑 | Airy Disk | - | 理想透镜受衍射限制时,点光源形成的中心亮斑图形。 |
| 瑞利判据 | Rayleigh Criterion | - | 衡量光学仪器分辨率的传统标准,指两点电像恰好能被分辨的状态。 |
| 衍射极限 | Diffraction Limit | - | 由光波动性决定的光学系统成像分辨率的物理上限。 |
| 奈奎斯特频率 | Nyquist Frequency | Nyq. Freq. | 离散采样系统能够无混叠还原的最高信号频率,等于采样频率的一半。 |
| 混叠/摩尔纹 | Aliasing / Moiré | - | 当信号频率高于奈奎斯特频率时,高频信息被错误采样为低频伪影。 |
| 边缘响应函数 | Edge Spread Function | ESF | 传感器捕捉到的理想阶跃边缘的强度分布曲线。 |
| 线扩散函数 | Line Spread Function | LSF | ESF的一阶导数,表示系统对线光源的响应。 |
| 空间频率响应 | Spatial Frequency Response | SFR | 通过刃边法(Slanted-edge)测得的系统响应,通常作为实测MTF。 |
| 斯特列尔比 | Strehl Ratio | - | 实际像点峰值强度与理论理想像点峰值强度的比值。 |
| 光学低通滤镜 | Optical Low-Pass Filter | OLPF | 置于传感器前的滤镜,通过轻微模糊图像来减少混叠现象。 |
| 前照式工艺 | Front-Illuminated | FSI | 传统工艺,光线需穿过金属布线层到达感光区,光路深且存在光学损耗。 |
| 背照式工艺 | Back-Illuminated | BSI | 翻转硅片从背面受光,缩短光路并大幅提升低光下的量子效率(QE)。 |
| 外延层 | Epitaxial Layer | EPI | 在衬底上生长出的单晶硅层,是光电转换发生的实际物理区域。 |
| 量子效率 | Quantum Efficiency | QE | 传感器将入射光子转换为电子的效率,受波长和材料厚度影响。 |
| 填充因子 | Fill Factor | FF | 单个像素中感光区域面积占像素总面积的比例。 |
| 微透镜 | Microlens | - | 位于像素顶部的微小透镜,用于将光线汇聚至感光区,提升 FF 和响应度。 |
| 光电二极管 | Photodiode | PD | 像素核心,负责将光能转化为电荷存储在势阱中。 |
| 主光线角 | Chief Ray Angle | CRA | 镜头边缘光线射入传感器的角度。传感器需通过微透镜位移来匹配。 |
| 深槽隔离 | Deep Trench Isolation | DTI | 在像素间蚀刻出的物理屏障,用于减少电荷扩散产生的电学串扰。 |
| 满阱容量 | Full Well Capacity | FWC | 单个像素势阱在饱和前能容纳的最大电子数量。 |
扩展阅读:
佳能各机型低通强度分析(R6 Mark III/R7/1D X Mark III)索尼A7M5低通强度分析永诺50mm F1.4专利仿真