如何判断镜头光轴有偏移?
前言
首先明确一点:歪轴不是非黑即白,有的镜头可能是某个方向稍微差一点但在可接受范围之内,而有的镜头是受到外力(磕碰、摔、震动等等)之后嗝屁了。所以肉眼土法读测试图的 bug 是碰到前者就不太好评估,而后者基本不用上测试图也能看出来。
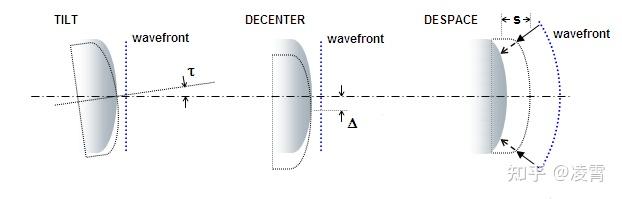
@一起来复消色差 提到利用中心慧差推断光轴,这也是可行的。理想的光学系统具有旋转对称性,光线应在轴心对称汇聚。一旦镜片发生倾斜 (tilt) 或偏心 (decenter),原本的轴上光线在经过该镜片时,本质上变成了相对于其几何中心的轴外光线。这会导致中心点出现本不该有的轴外像差(例如彗差)。
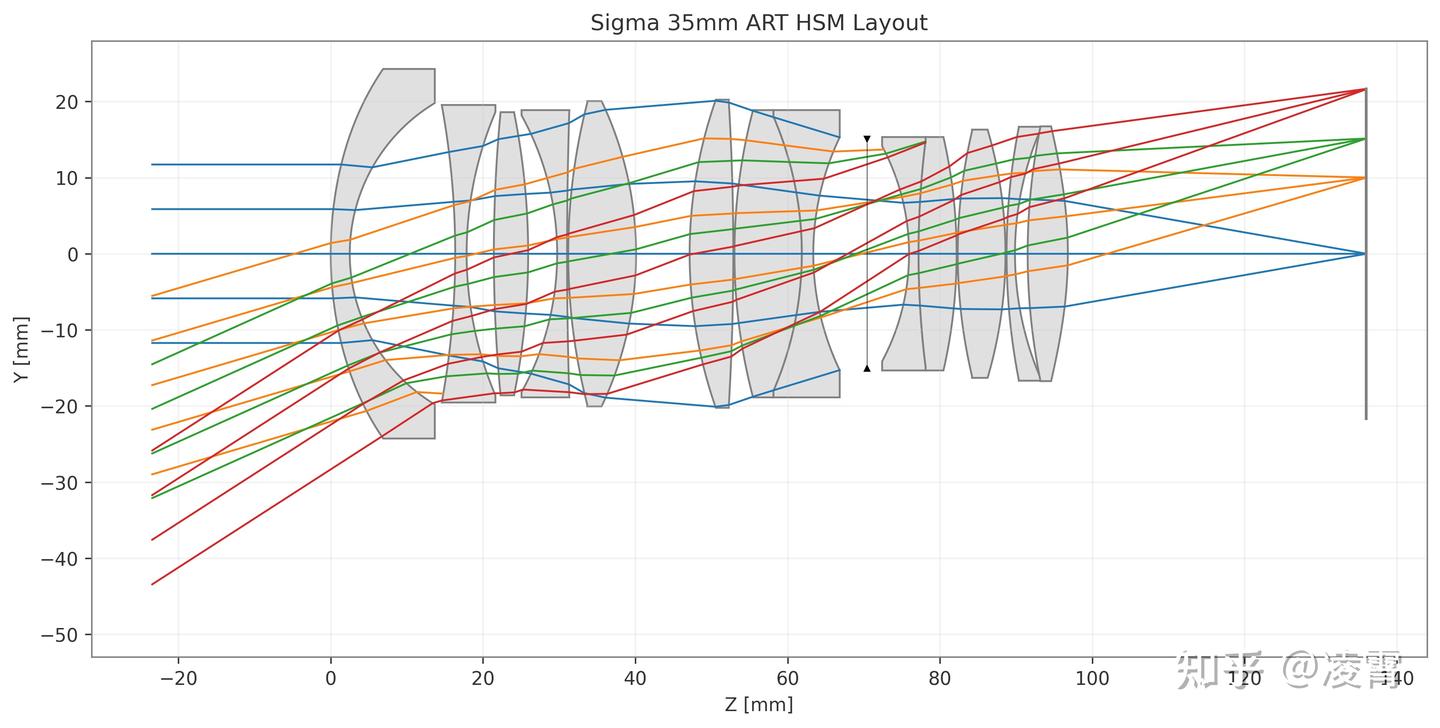
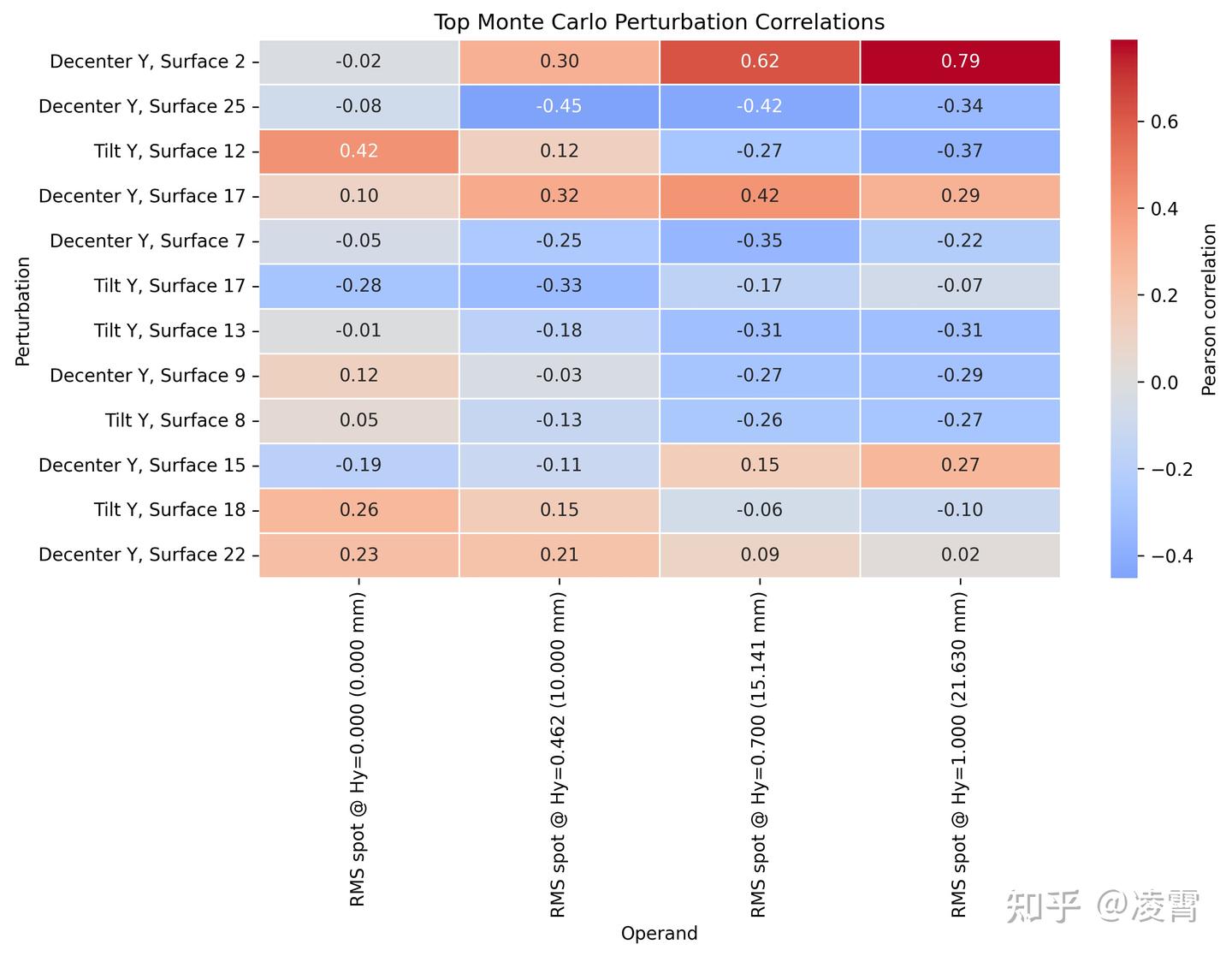
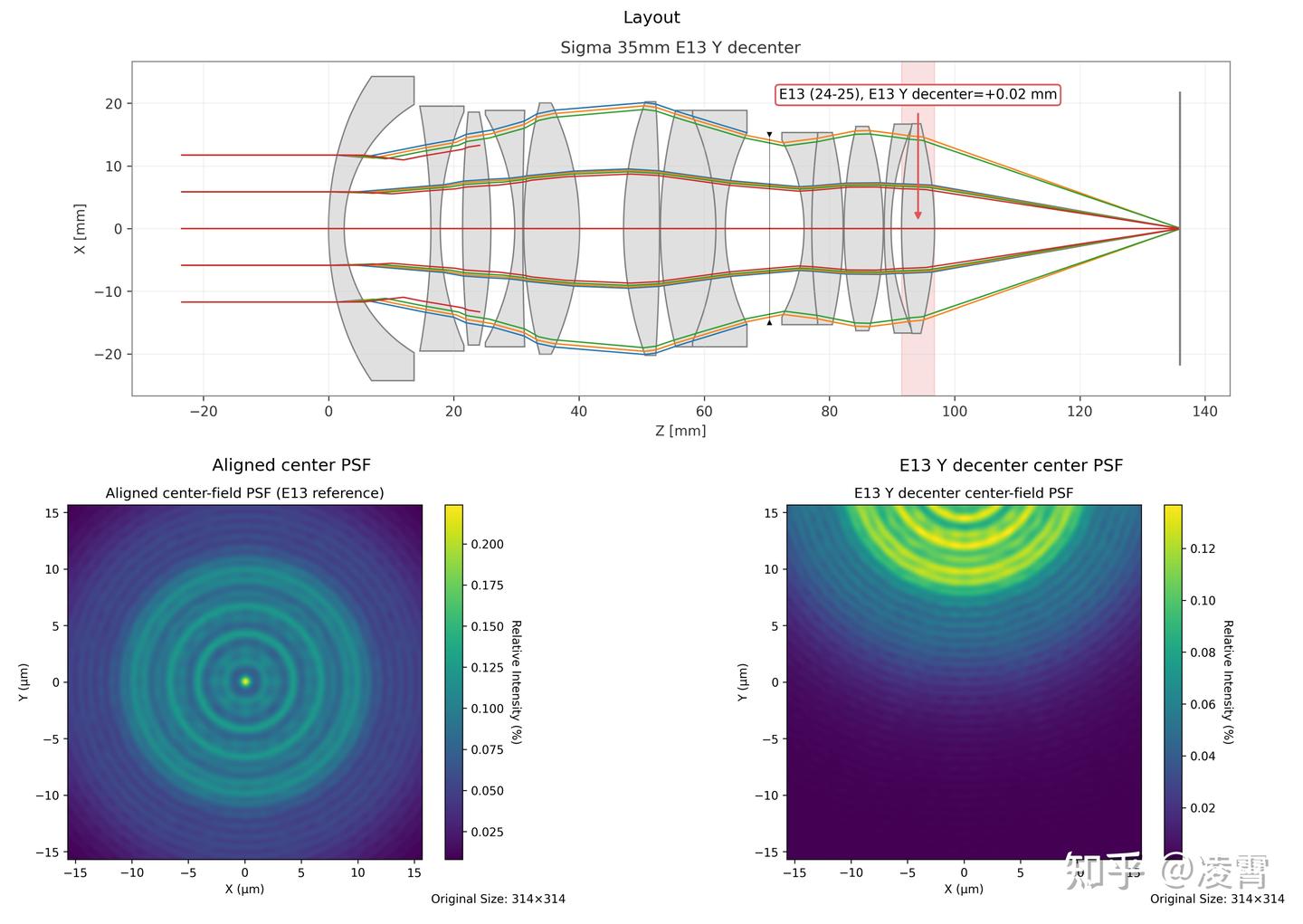
我们先搓一个经典的 Sigma 35mm F1.4 ART HSM 用于演示,跑一遍蒙特卡洛公差分析后,发现它最后一片非球面对公差相对敏感。
那么我们把这片镜片沿 Y 轴干歪 0.01 rad,看看轴上点光源 PSF 模拟是什么样的,见图的右下:
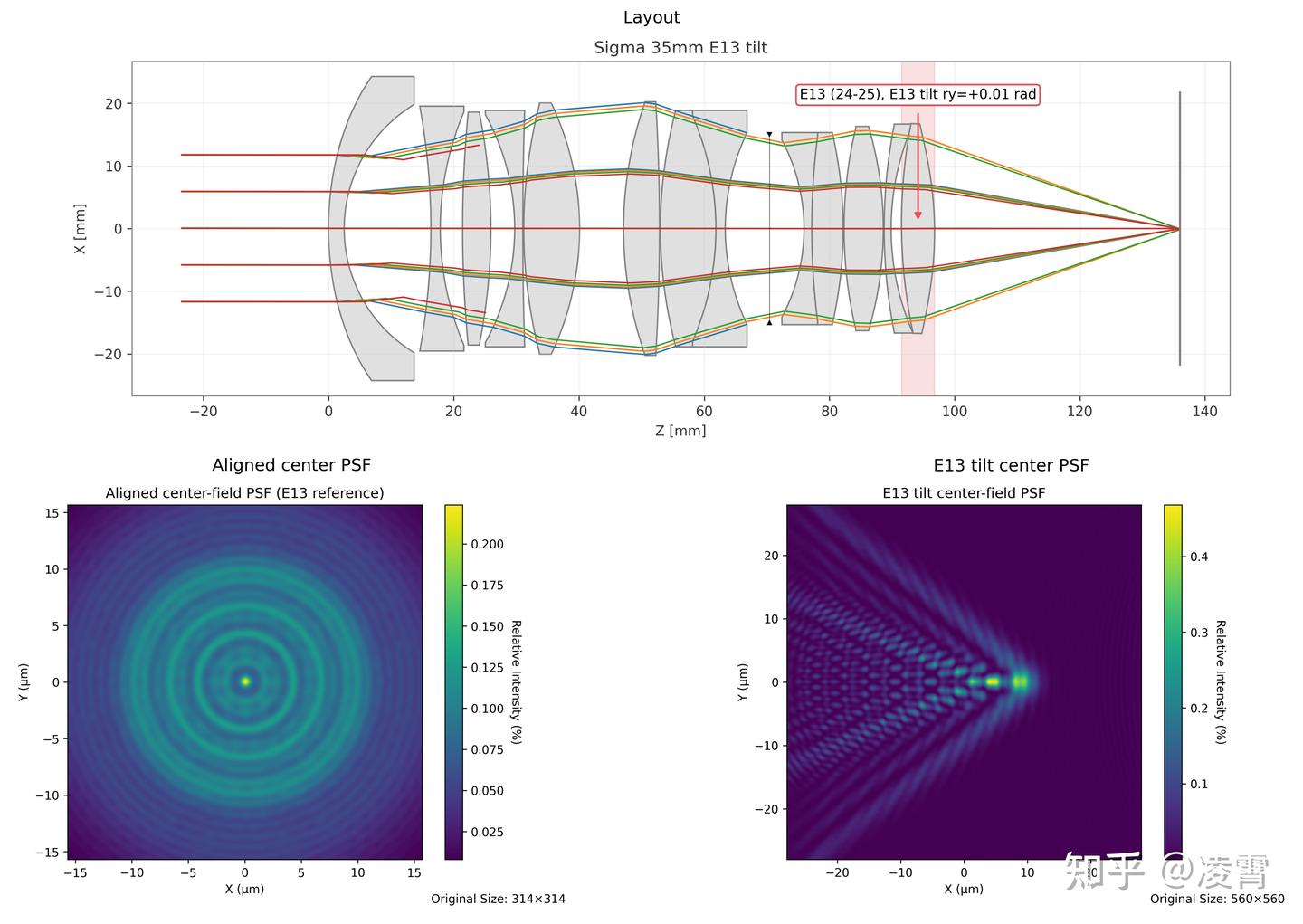
对比一下,非常明显混入了慧差。注意这仅仅是歪了 0.01 rad!
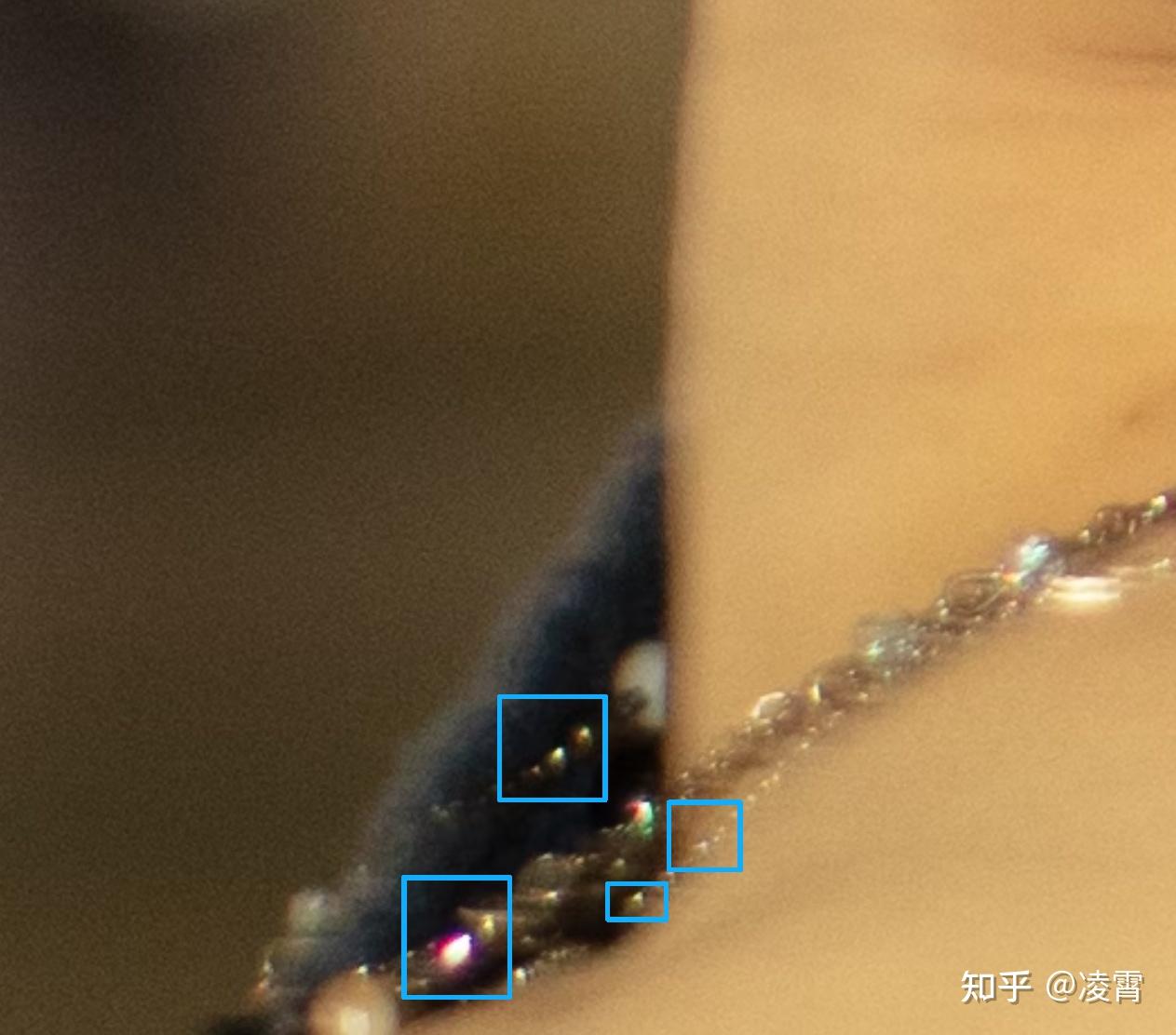
而实际上要是中心能观察出来这种情况,必然已经歪轴歪到外太空了。比如有位网友对他的腾龙 45mm F1.8 成像感到非常奇怪,我们对着中心区域放大能看到很多异常:
这是一种很明显的情况,但是,注意我要说但是了,光学系统歪轴 (misalign) 的情形不仅限于倾斜 (tilt) 和偏心 (decenter),还有轴向移位 (desapce),那这种情况中心还能看出慧差吗?
轴向移位是一个矢量,我们还是选最后一片非球,把它沿着光轴移动 +0.02mm,看看结果:
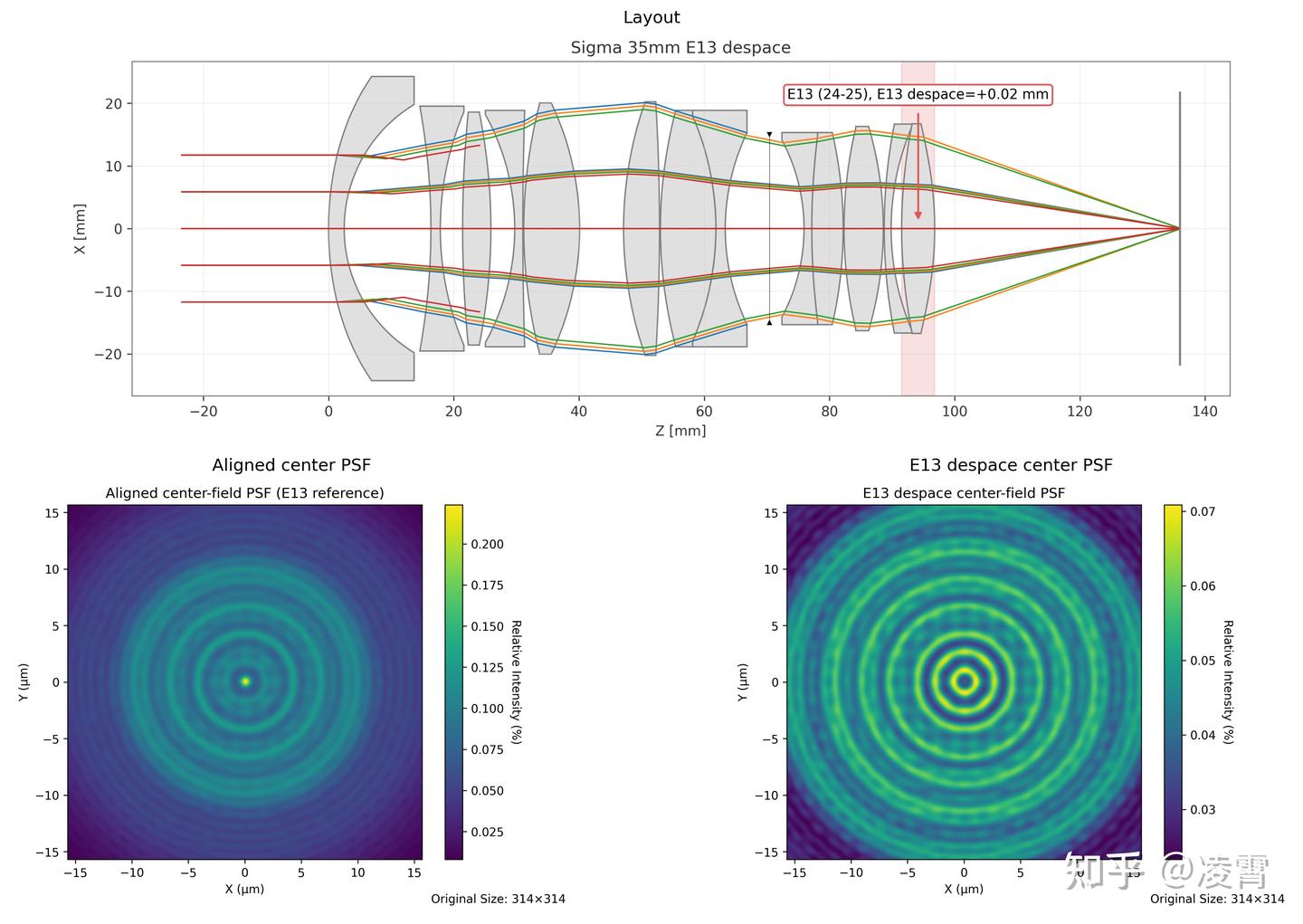
并没有发现慧差,因为此时光束对各透镜仍为旋转对称入射,主要受影响的是球差、场曲等等。
然后如果仅仅发生了偏心 (decenter),理论上中心也应该有慧差,但是各种像差揉在了一起,这个案例中并不明显:
注:以上仅仅是三种情况的单独模拟,实际情况是千奇百怪的,可以是任意 n 种的排列组合。
所以这时候有强迫症的人就想问了:我花大价钱买的牛头既没有歪的那么离谱,但我又总觉得哪哪不对劲,单看西门子星图和中心慧差也并不明显,那到底有没有能定量评估,要求又相对低、便于实操的方法呢?
有的有的,兄弟,当然有的,不然我在这水答案干嘛
一、光轴可视化:FFD MTF
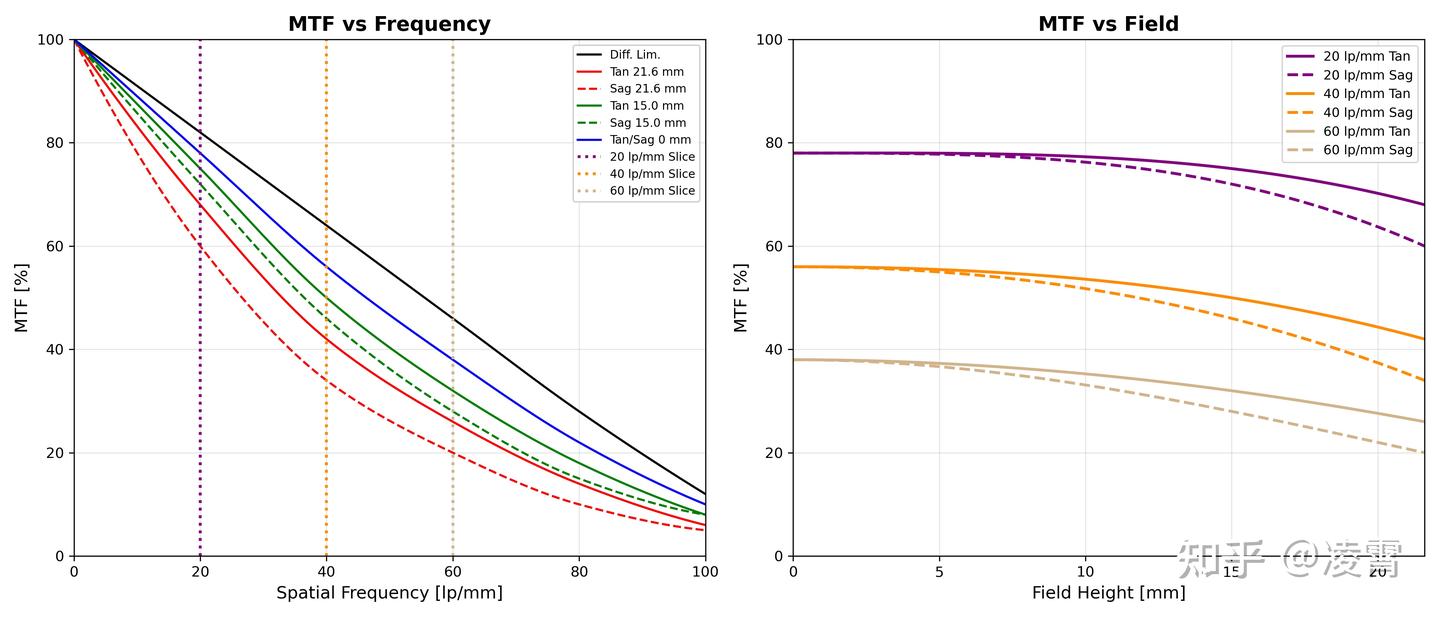
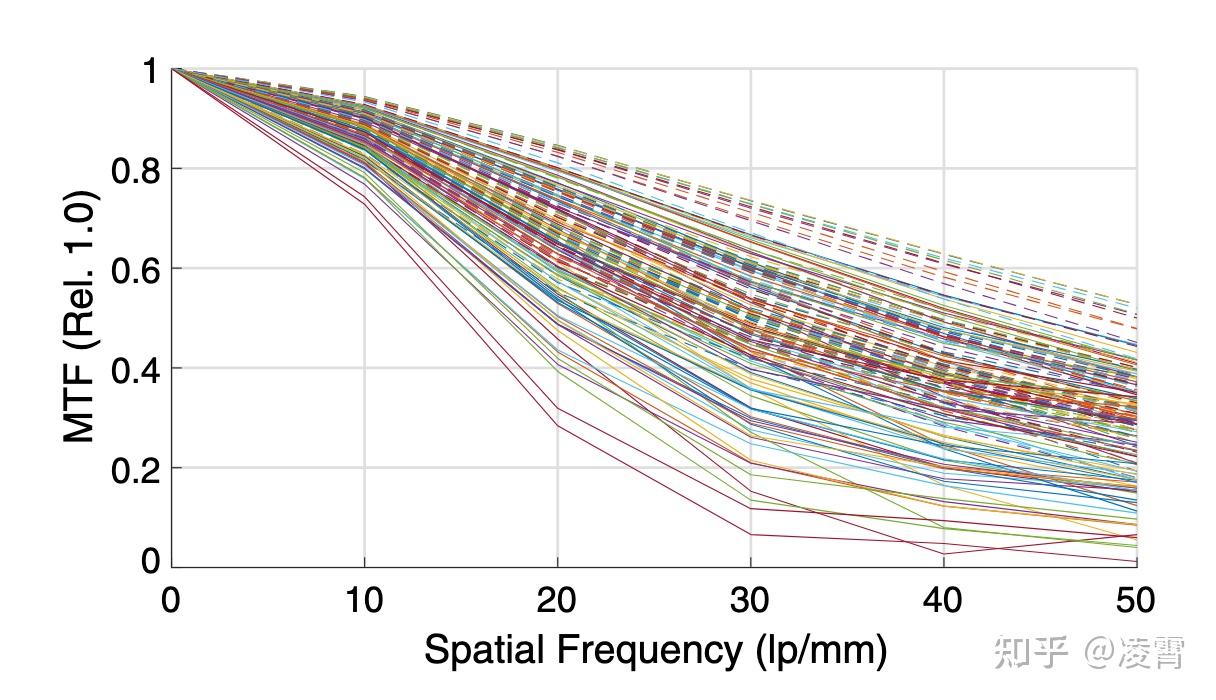
Dube et al. (2017) 提出了用 FFD(Full Field Display) MTF 来直观展示镜头的光轴情况[1],因为常用的 MTF vs 频率或 MTF vs 视场 并不适合拿来评价光轴:
这两种图具体该怎么看,可以参考:
如何通过镜头的mtf图判断镜头能‘喂饱多少像素’?MTF vs 视场的 bug 是如果 S/T 方向只画一条线的话,那它的默认设定就是镜头的光轴没歪,强行拿它来画一个歪轴的镜头不是不行,只是加上误差棒或者区间看起来会很乱;MTF vs 频率的 bug 也同理,视场上的点要是取太多就没什么可读性:
所以针对这种情况,Dube et al. 建议用 FFD MTF,这个看起来有点像角膜地形图,所以后面就把它叫 MTF 地形图吧:
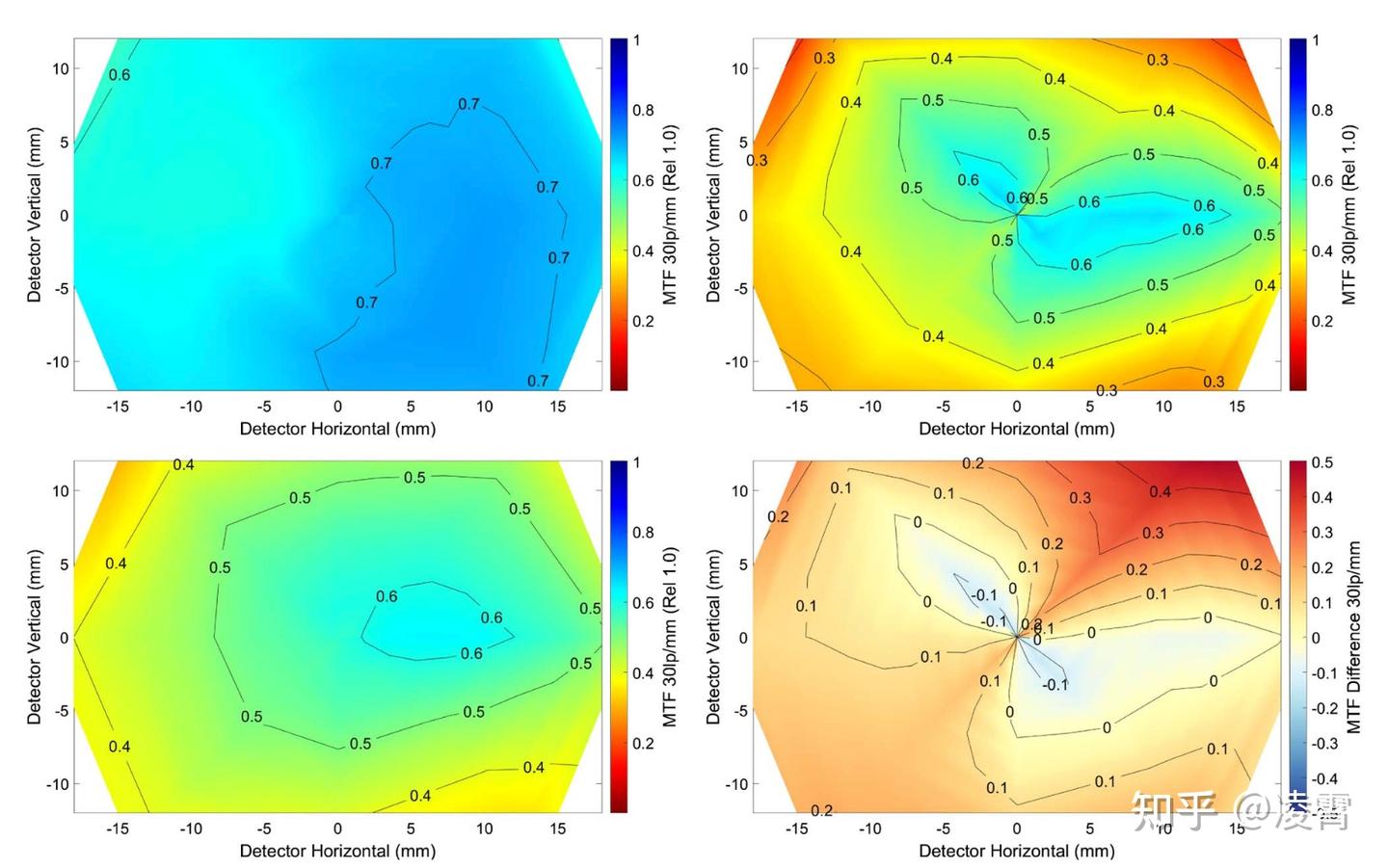
而所谓 MTF 地形图,本质上是把
画成一个二维场图。这里 是像高,
是像面中的方位角,
是某个空间频率。
而所谓的均值图(上图左下),就是把弧矢和子午两个方向取平均值:
差值图(上图右下)同理:
对于一个理论上光轴正的镜头来说,它的 MTF 地形图通常应当满足下面几个特征:
- 左右、上下,至少大体镜像对称;
- 平均图
Average (T&S)可以有边角自然下降,但不应该出现过大波动; - 差值图
Difference (T&S)最理想是围绕 0 小范围起伏。Dube 那篇文章里专门强调,Difference (T&S)对于子午/弧矢向 MTF 随视场和方位变化的梯度极其敏感,也特别适合观察偏离旋转对称的情况。
二、土法但科学的方案:MTF Mapper
有实验室条件能捯饬 Trioptics/Optikos 传函仪当然最好。但既然问出这种问题了,那默认不具备实验室条件。如果在家折腾的话, MTF Mapper 非常值得尝试。
1. 下载程序和准备测试卡
程序:SourceForge 的 MTF mapper 项目页[2] https://sourceforge.net/projects/mtfmapper/
- 测试卡:文件列表里的
mtfmapper_sample_test_charts_0.5_v5.zip - 打印:打印 lensgrid 即可,文件名后面是输出幅面大小,即按 a0/a1/a2/a3 尺寸打印
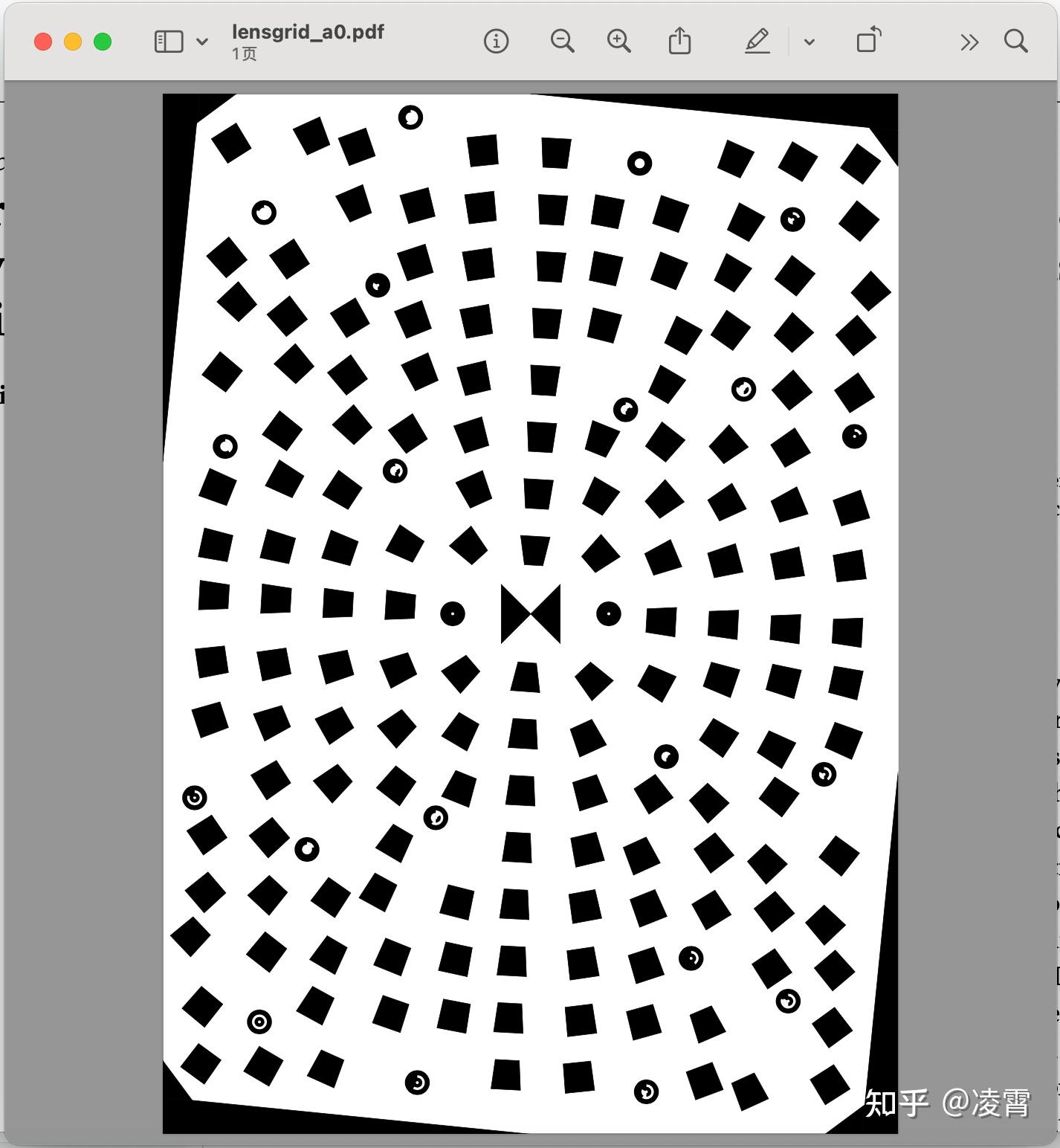
这个测试图用来测的是 SFR,原理可以看姜老师 @姜尧耕(渔樵耕牍) 这篇,写的很详细:
这才是真正的MTF:从SFR测量流程到一般像差表述,对iso流程的评价2.拍摄时的原则
- 测试卡尽量铺平
- 防抖关
- 光线均匀
- 拍 RAW
- 测试卡尽量占满画面
- 做一小段焦点包围,不要只拍一张中心合焦图
这里还要特别强调:作者专门提醒过,测试卡必须尽量与传感器平行,否则结果就不准了[3]。
3. 计算流程
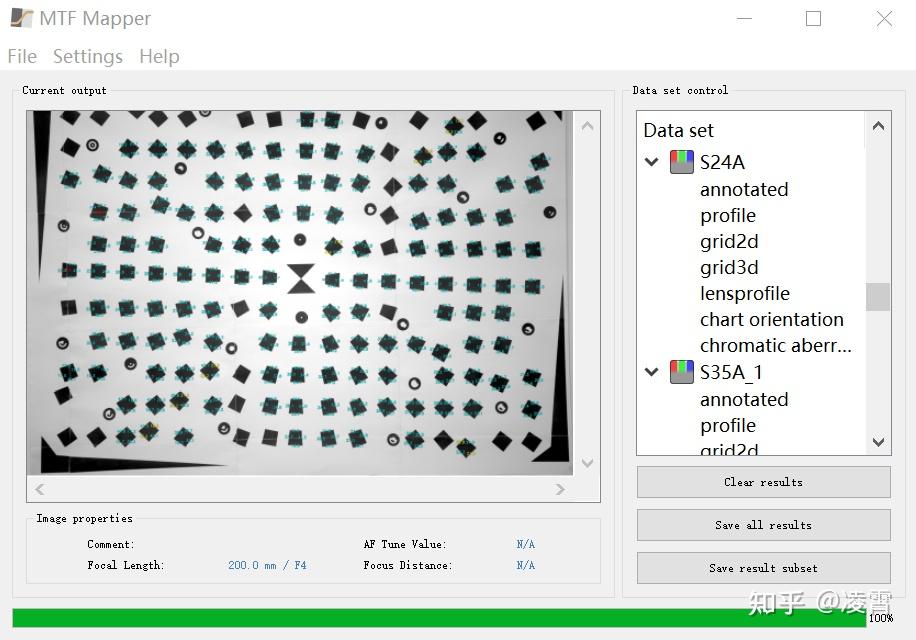
- 打开 MTF Mapper。
- 用
File -> Open载入 RAW 测试图 - 在
Desired output types里勾选Annotated image和Grid - 点击
Open,等左侧Data set里生成结果 - 点开
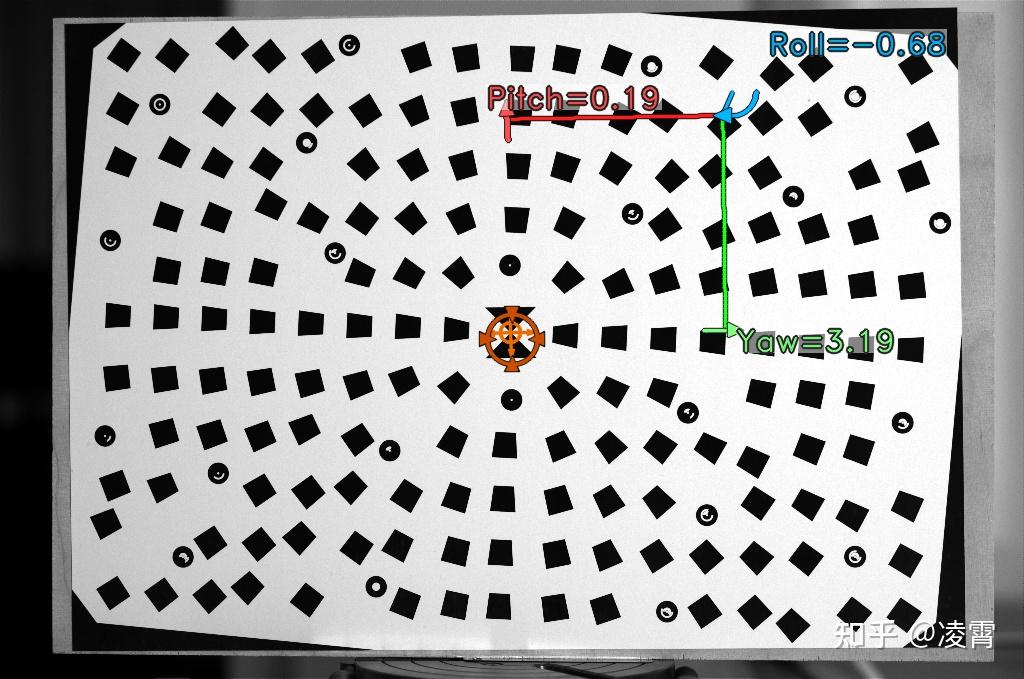
annotated,先看 chart orientation
注意 chart orientation 标注了测试卡和传感器的平行情况,分别标了三个角度的偏移:横滚(Roll)、俯仰(Pitch)和航向(Yaw),下图就是看似平行但实际上没平行的情况,严重没平行的情况就不用继续了,因为继续也是白搭。
确保平行无误之后,看 Grid 就行了
光轴比较正的例子:
弧矢子午有差异的例子:
当然 MTF vs 视场也能出图:
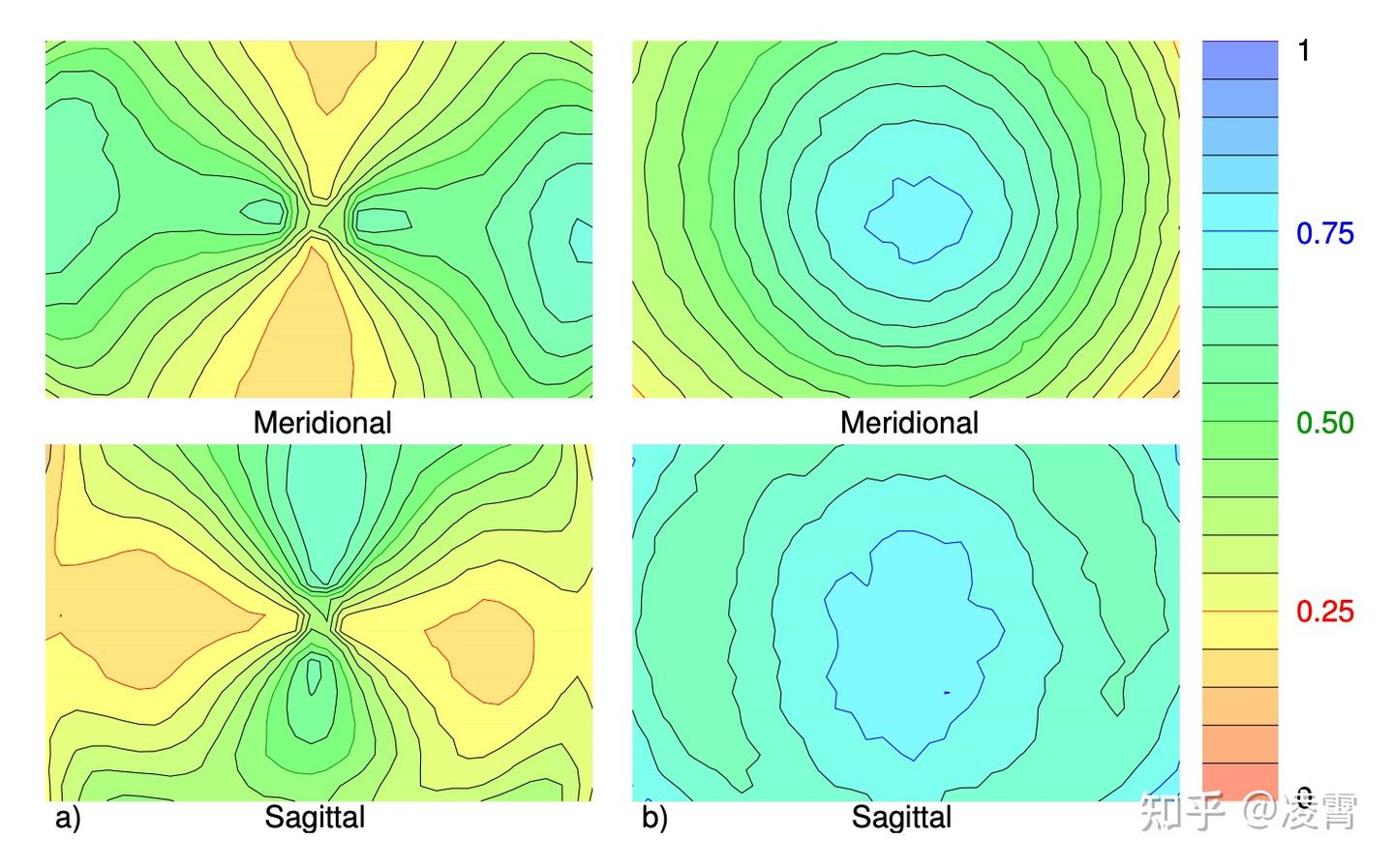
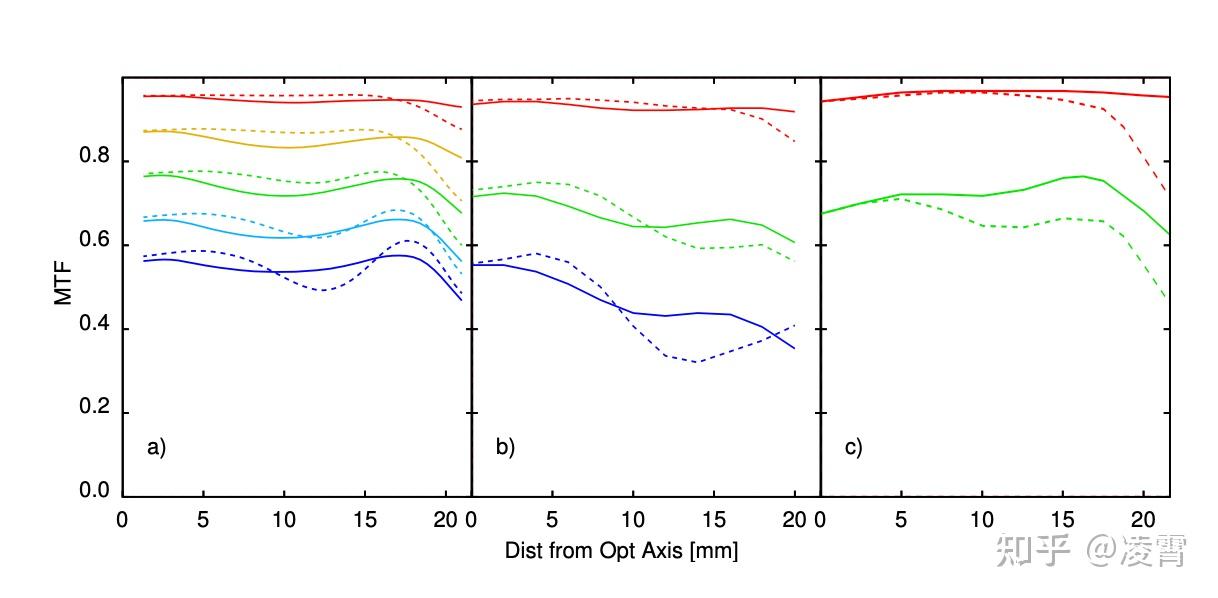
下图 a 展示了 D850 机震(反光板)引起垂直抖动导致地形图的变化:
- 垂直方向的抖动不会影响垂直边缘的清晰度
- 子午方向在 x 轴方向保持相对高 MTF
- 弧矢方向在 y 轴方向保持相对高 MTF
图 b 展示了一个光轴正的 Nikkor AI 20 mm f/3.5@f/8 地形图:
- 同心圆体现光轴良好
- 子午方向的像差校正稍弱,因此等高线更密集
三、真正完美的镜头,可能少之又少
Dube et al. 测了 2000 多支镜头,价格范围从 125 美元到 42750 美元。结果大吃一惊:真正表现非常接近理想旋转对称状态的镜头,不到 10%。
当然,不到 10% 接近完美不等于 90% 都是歪的。这两个概念差得很远。
所以更准确的理解应该是:
- 绝大多数镜头都存在某种程度的装配误差、样本差异;
- 其中很多镜头在实际拍摄里依然完全能用,甚至很好用;
- 真正值得警惕的是那种差异明显、对称失衡、中心也混入异常像差的情况。
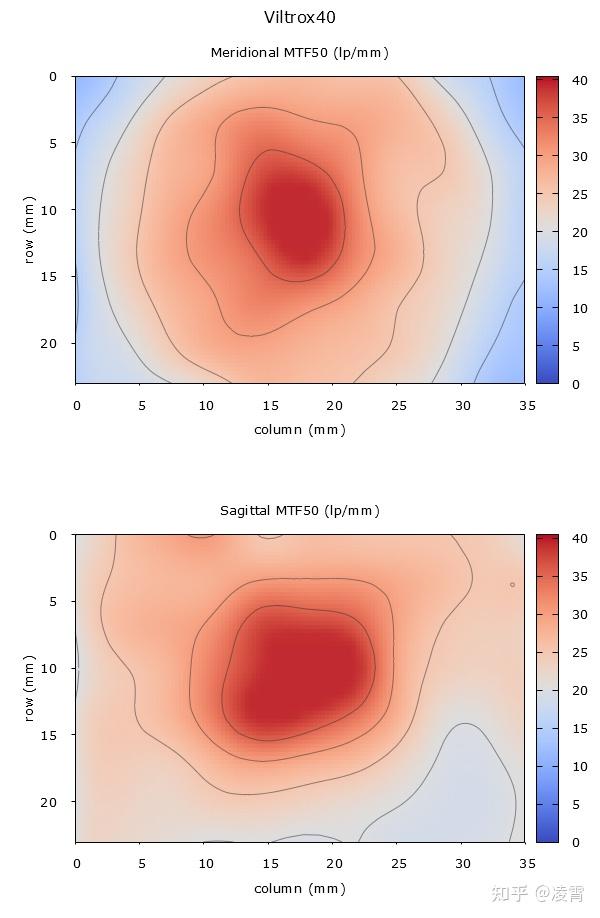
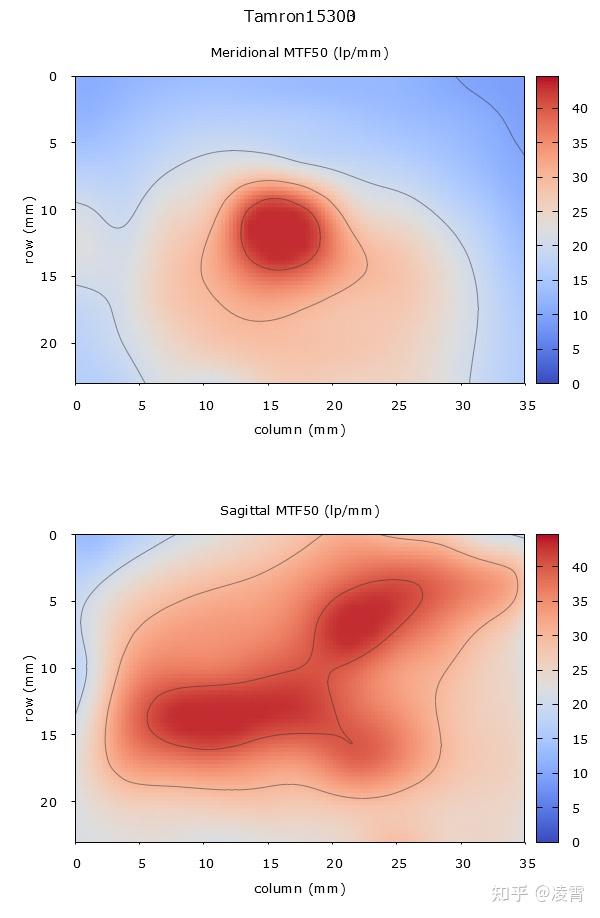
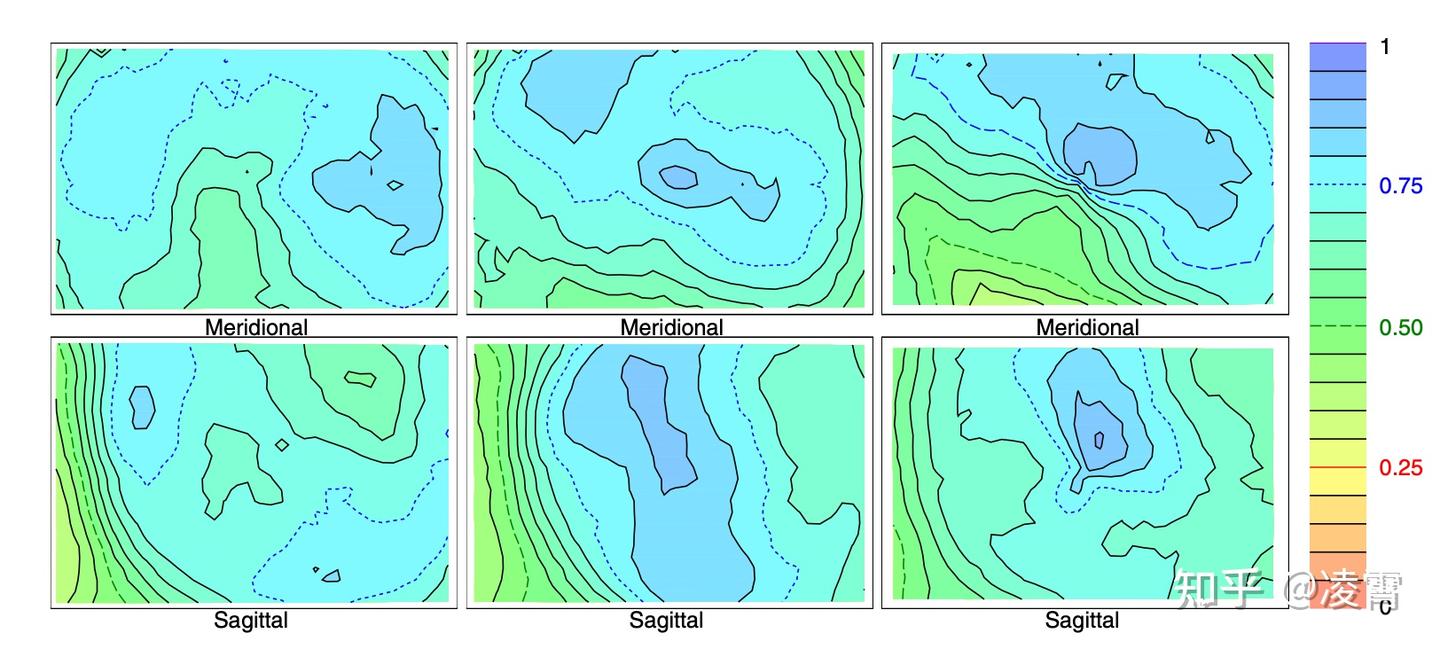
即便是牛头,样本之间的 MTF 地形图也可能长得不一样。
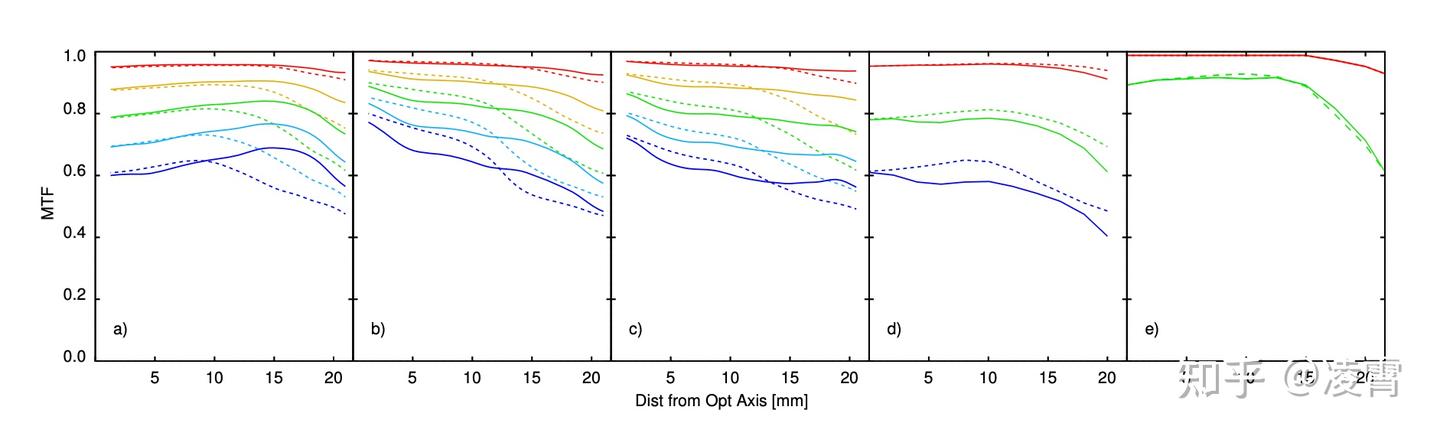
Delly et al. 测了三支 Sigma 40 mm f/1.4 镜头[4],虽然各有差异,但作者认为,三支镜头依然都符合对一支大光圈牛头的预期。
四、趣味发现
1. LoCA
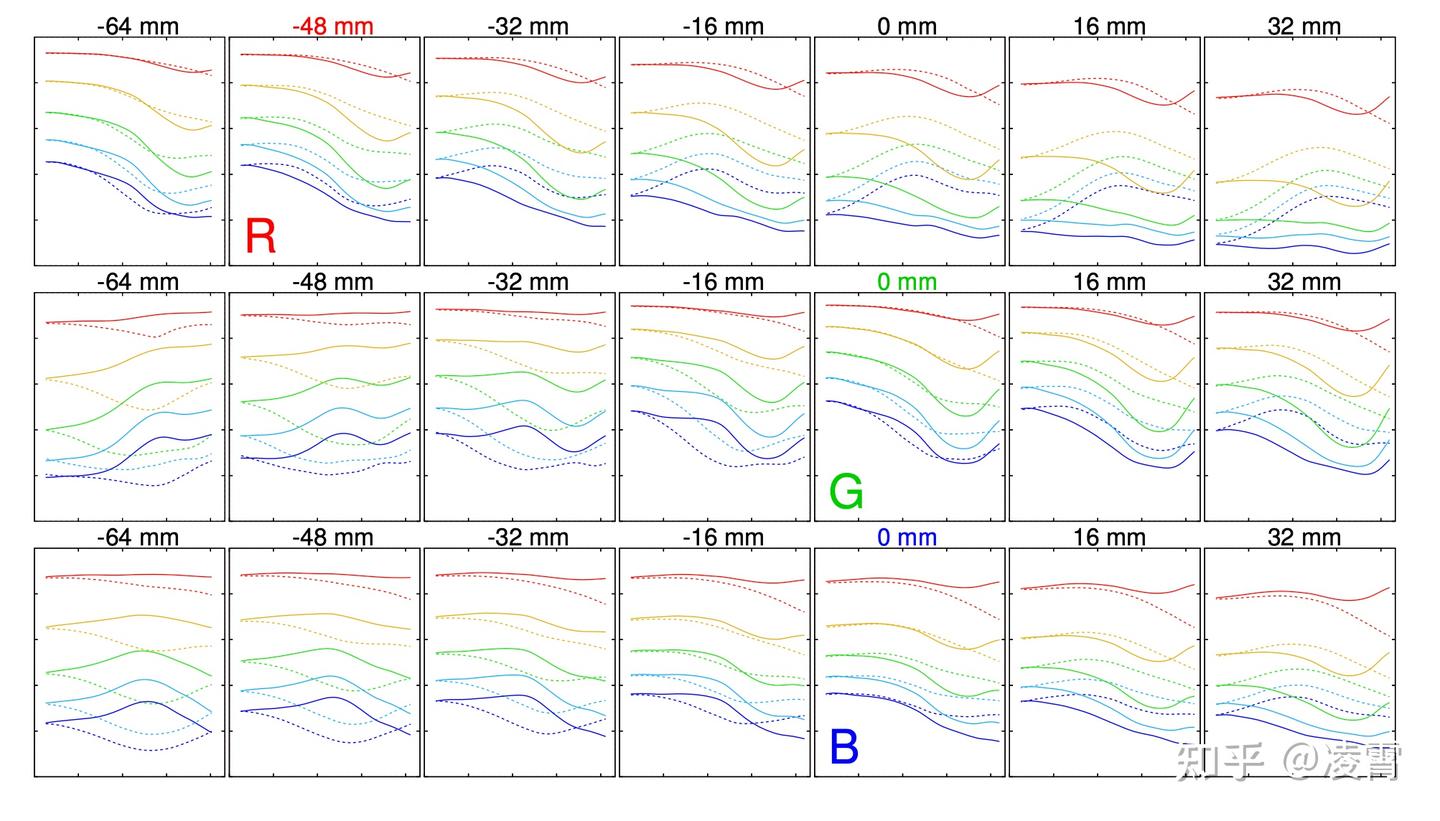
这套 MTF 测试还能看出轴向色差。通过测量红、绿、蓝三个通道的 MTF,看它们的最佳焦点是否重合。
举个例子:腾龙 45mm f/1.8 全开光圈拍摄时,会发现 R 通道的焦点和 G/B 不在同一个位置。具体来说,要让 R 成像最清晰,对焦距离得比 G 往前推大约 48 毫米(物方);而 G 和 B 的焦点倒是基本重合。这种焦点错位反映到传感器上,就是红绿通道之间有大约 44 微米的轴向色差。
2. 质量评价指标
Delly et al. 对比了几支超广角镜头在最优对焦状态下的成像表现。从 MTF 地形图上能看出,Irix 15mm 这支镜头在画面中心区域的对比度不仅偏低,而且分布很不均匀,明显比其他几支镜头差一截。
作者认为,这种肉眼可见的差异,完全可以转化成具体的量化指标——就像工厂质检设的标准一样,不合格的直接筛掉。
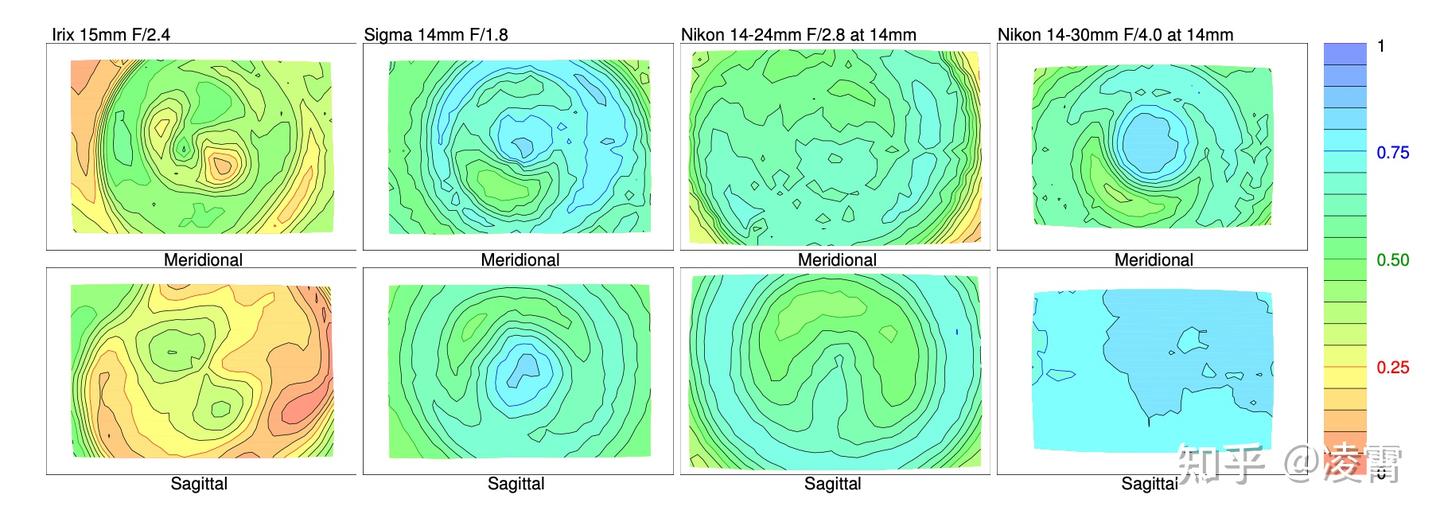
于是他们设计了一个简单的评分体系 MTFQ,具体设定是:针对全画幅,测试频率选 40lp/mm,光源波长大约 530-570nm。
评分包含两部分:
第一项取全画面 MTF 值的第 5 百分位(记作 ),用于量化在图像几乎任何位置都能达到的最低 MTF 水平
第二项只看中心画质——取中心 8mm 范围内 MTF 的第 5 百分位(记作 )。
最后把这两个数取平均,就是这支镜头的总分:
实测下来,四支镜头的得分分别是 0.19、0.49、0.45 和 0.54。Irix 那支只有 0.19;就连 14-24mm 这种变焦镜头都拿到了 0.54,可见这个评分体系确实能拉开差距。
3. 测试图平整度
作者阐明了 MTF 测试中对焦深(Depth of Focus)的限制及其与成像倍率的定量关系。在成像倍率(即像高与物高之比
)且光圈 f/1.4 的条件下,系统的焦深极为浅,仅允许约 3 毫米的离焦容差;一旦超过此限,MTF 值便会跌落 0.01 以上。
据此,可推导出测试图表机械平整度的理论约束:
允许的离焦公差 与成像倍率
的平方成反比,即
具体而言,当倍率从 1:33(
)降低至 1:77(
)时,由于
,图表的平面度公差相应放宽约 5 倍,从 3 毫米增至 15 毫米。这意味着在高倍率(近摄)条件下,测试图表必须保持高平整度(起伏小于数毫米),否则离焦引入的 MTF 误差将与镜头像差混淆,导致测量失效;而在低倍率(远摄距)条件下,机械公差则按平方关系显著放宽。
说白了就是大房间+大图纸+远距离拍摄就可以降低对图纸的平整度要求。
4. 测量可复现性与鲁棒性
作者拿自己的实测结果和 LensRentals、官方 MTF 进行横向对比,表示基本上差别不大
五、关于歪轴的重灾区
这个没有标准答案,但我的经验是:老单反镜头+光轴容易歪的设计+二手市场 这些 debuff 叠在一块的话,那就必然是歪轴的重灾区。
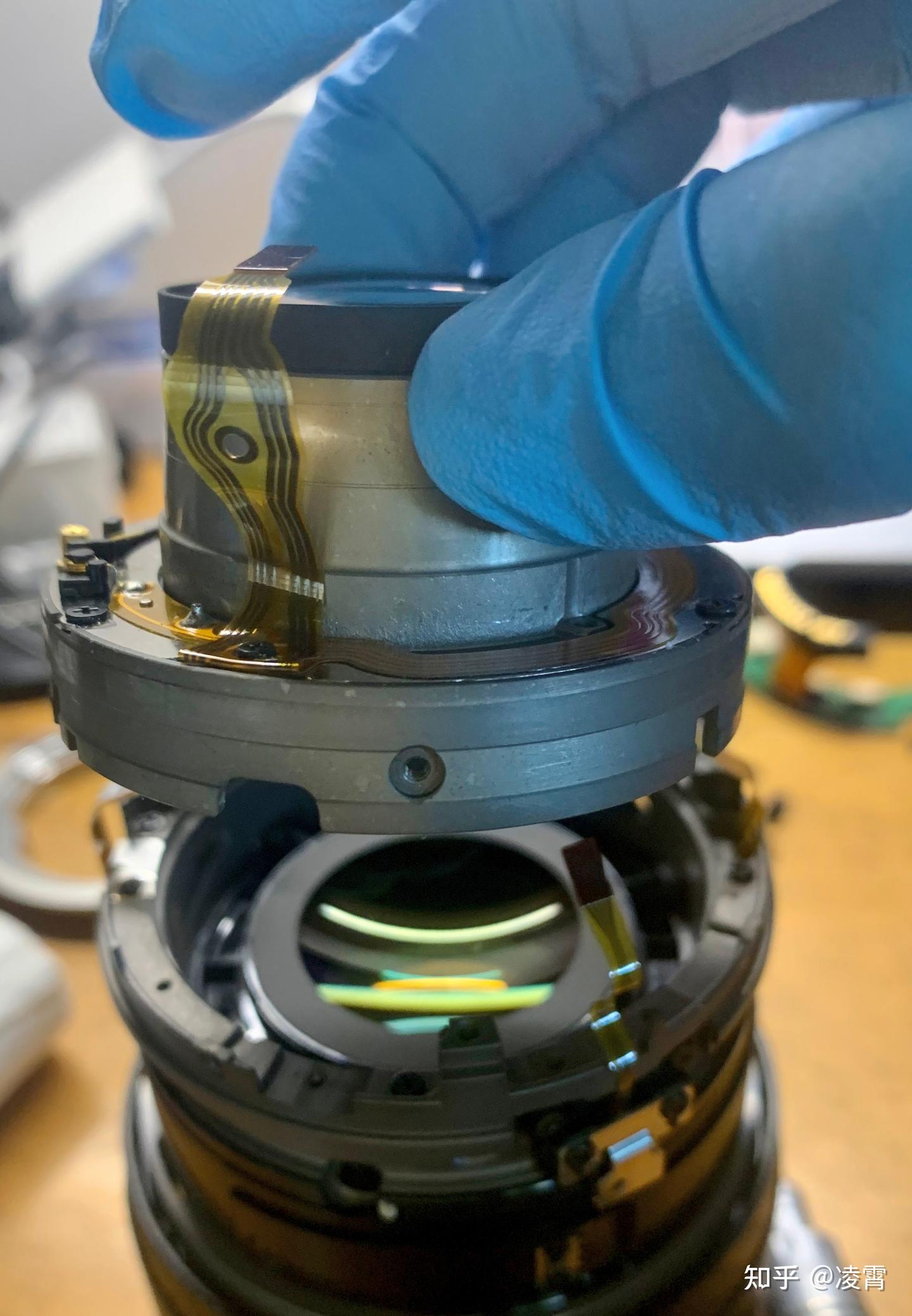
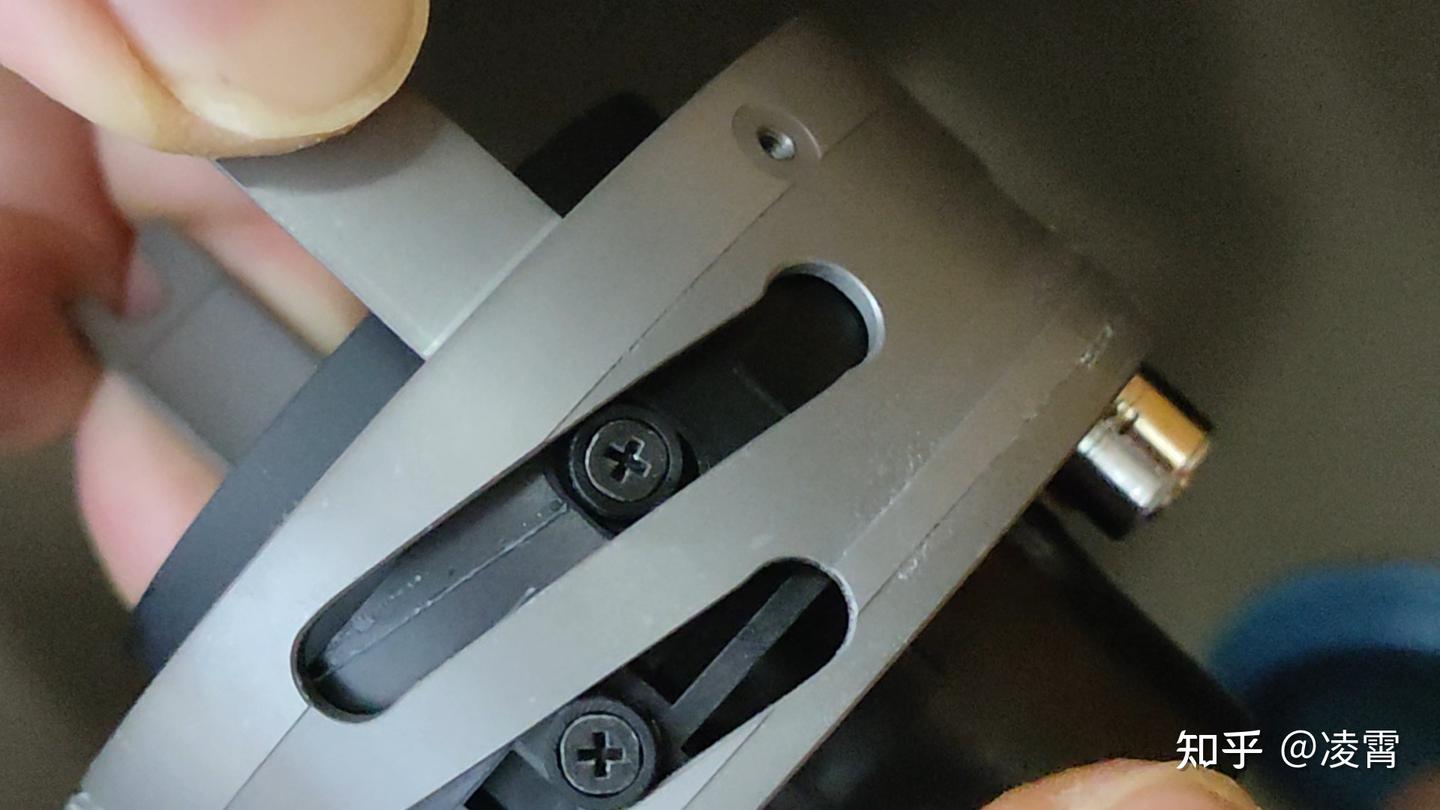
什么叫光轴容易歪的镜头呢?比如适马老单反镜头当中,35ART 采用了三点单滑轨式的对焦组,这个设计时间长了遇到震动摇晃之类的就容易歪 ,更不用提磕碰摔过了,刚好这个对焦组对公差又相当敏感,所以可以大胆推测为什么它早期一致好评,但是后期却褒贬不一:
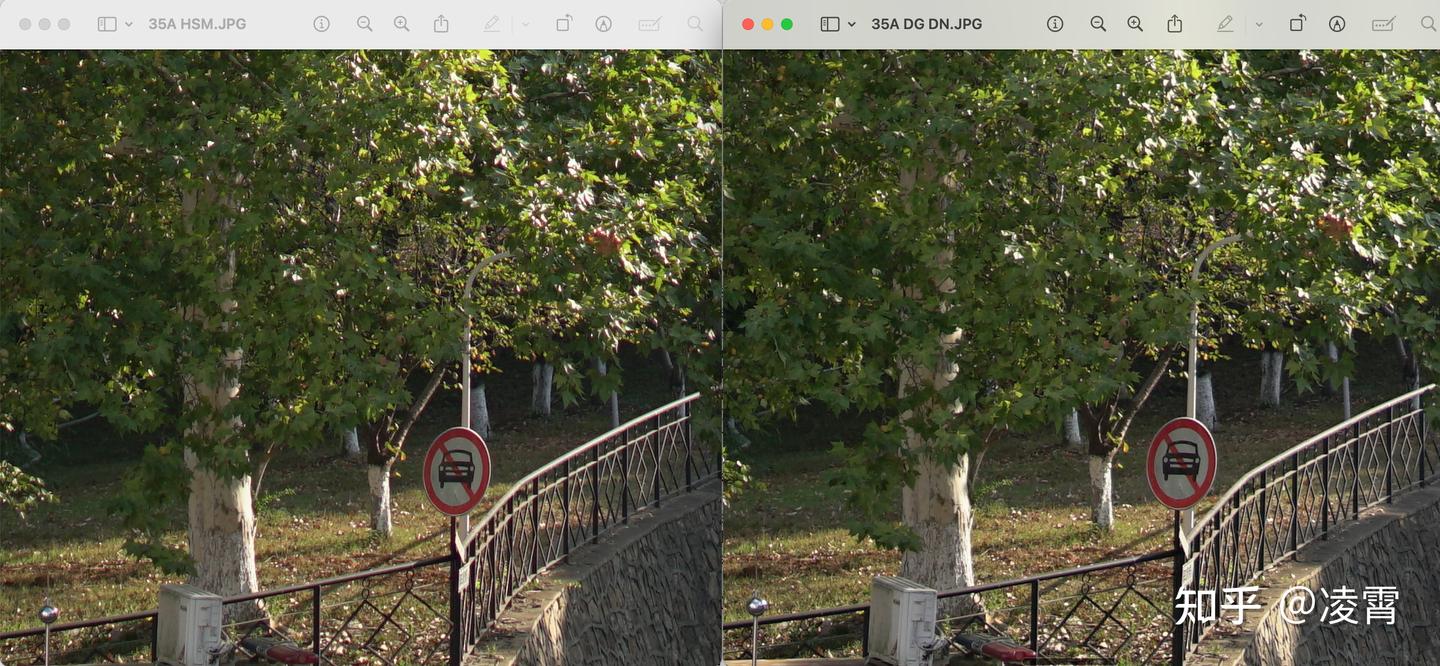
对于光轴正的样本,中心画质和无反版 35 ART DN 实际上并没有太大区别:
而后期采用了双滑轨对焦组的 24ART HSM 情况就好很多:
进入无反时代,适马的镜头似乎就没那么容易歪了(单片对焦的功劳?)感觉工艺上也进步了很多


当然也有传闻部分镜头(例如索尼 FE 200-600G),后期生产的版本会比前期控制的更好。