司机激活智驾并双手脱离方向盘不到一分钟,撞上半挂车,轿车上一家三口身亡,智驾真的能解放双手吗?
智驾领域,有个词叫做 corner case;智驾靠传感器感知路况,而传感器领域,有个词叫 degradation。
corner case指的是“角落用例”,或者也可以叫“边缘用例”。例如马路上出现一个大红球、侧翻的白色货车、误闯马路的动物等等。

这种数据在正常驾驶训练数据中极为罕见,智驾系统一旦遭遇,常常会因为没有经历过相关训练而无法做出正确决策。轻则虚警幽灵刹车,重则对障碍物视而不见直接撞上去。

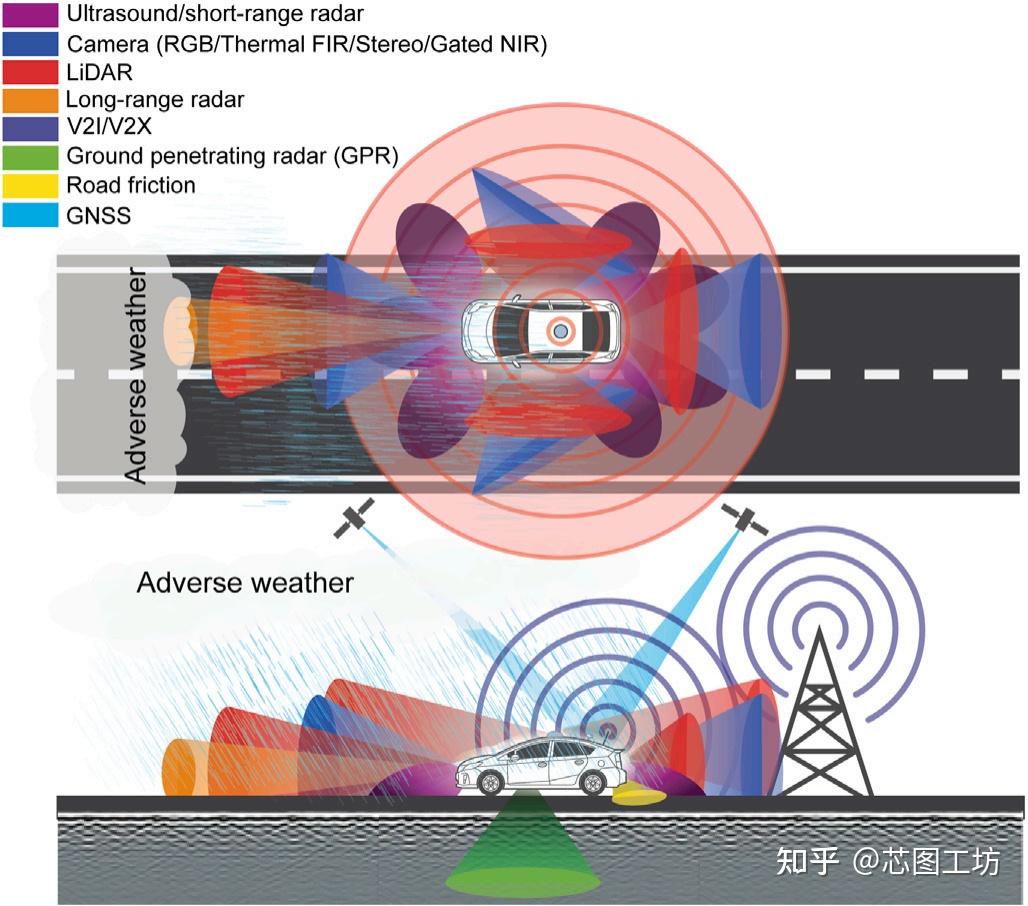
degradation指的是传感器退化,目前智驾主要依赖三类硬件传感器:
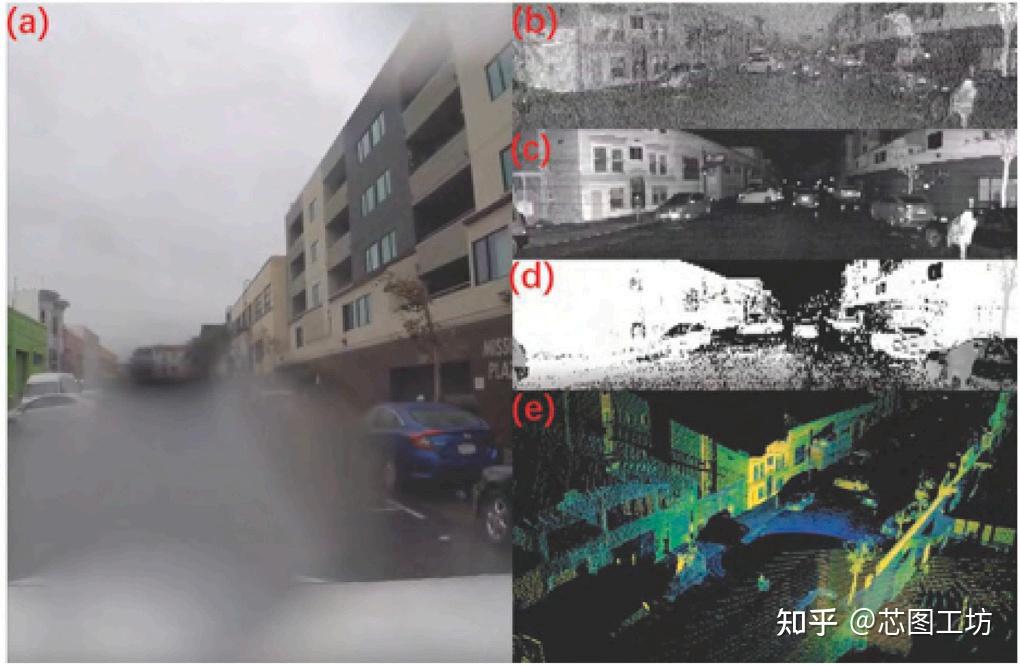
- 摄像头,通过捕捉环境光线来呈现色彩与图像语义;
- 激光雷达,通过发射激光脉冲并接收回波来测量物体的三维空间几何深度;
- 毫米波雷达,则通过毫米波段电磁波来探测物体的相对距离与速度。
所谓的传感器退化,就是指这些硬件在遭遇特定恶劣环境时,其物理感知与信号传输能力发生严重衰减。
光学摄像头在夜间暗光或对向远光灯炫目时,画面质量会急剧下降,甚至局部过曝光致盲。
激光雷达在大雨、浓雾或镜头表面覆盖水膜时,激光能量会被水分子大量吸收或散射。
毫米波雷达的退化环境相对较少,面对极端天气和直接的物理遮挡可能会遭遇退化。不过毫米波雷达无法像相机、激光雷达那样获取高精度的障碍物轮廓。业内目前正在推广 4D 毫米波雷达来弥补这一缺陷。
传感器出现退化的直接后果,就是输入给智驾系统的原始数据被严重污染或丢失,使得车辆在感知层面变成盲人。
在这起事故中,这辆轿车在最左侧的快车道上,撞上了一辆因故障熄火、停放于行车道内的重型半挂车。凌晨的暗光环境让车辆遭遇了传感器退化,而且最左侧快车道上绝对静止的大货车,则构成了一个典型的角落用例。

2023年,Yingjie Zhang在论文《Perception and sensing for autonomous vehicles under adverse weather conditions: A survey》中,深入剖析了环境因素对各类车载传感器造成的物理及信号层面的退化机理。
该研究指出,光学摄像头在夜间或恶劣天气下的光学散射会导致图像对比度呈指数级下降。
论文揭示了不同波长激光雷达的物理局限:目前主流的1550纳米波长激光雷达虽然在晴天探测距离远,但它恰好处于水分子的强烈吸收带,在雨天或镜头表面有水膜时,其能量会被剧烈衰减,且它在雪地表面的反射率比905纳米波长差了大约97%。
这意味着当遭遇夜间暗光或复杂气象工况时,智驾硬件本身的物理局限会直接限制输入数据的质量上限,而后端的算法模型根本无法在物理信号已经丢失的受污染数据中无中生有。
此外,算法的泛化性不足更是智驾系统的死穴。
2025年,A. Shoeb在论文《Out-of-Distribution Segmentation in Autonomous Driving: Problems and State of the Art》中明确指出,现有的智能驾驶语义分割模型普遍基于“闭集假设”,即默认车辆在路上看到的所有物体类别都必须存在于训练集内。
一旦驶入开放世界,遭遇从未见过的分布外(OOD)或异常障碍物时,由于深度学习网络的统计学本质缺陷,模型无法主动识别出未知,反而会以极高的置信度做出完全错误的归类决策。
面对一辆侧翻或者绝对静止横摆在超车道上的白色半挂车,智驾系统的神经网络极有可能将其高置信度地误判为空旷的天空或平整的路面,从而在感知层将其直接过滤。
在智驾达到绝对的100%安全之前,人类不应该将生命托付给算法。当人类双手脱离方向盘、注意力分散之后,一旦车辆遭遇智驾系统无法识别的极端角落用例,人类重新进入驾驶状态并建立情境意识通常需要经历感知、认知、决策到最后执行的完整心理阶段。
在高速上,一秒之差,可能就是生与死的区别。安全驾驶,对自己负责,也对社会负责。