车用雷达:超声波雷达、毫米波雷达、激光雷达的区别是什么?
现在的车,只要带点智能化配置,都离不开各种雷达。就算是以前的老车,也都带有倒车雷达,所以雷达在车上的应用非常普遍。
车用雷达常见的有三种,分别是超声波雷达、毫米波雷达、激光雷达。很多车主都只是听说过,但并分不清三种雷达到底有啥区别、各自管什么、谁更好?今天我们就来详细说一下。
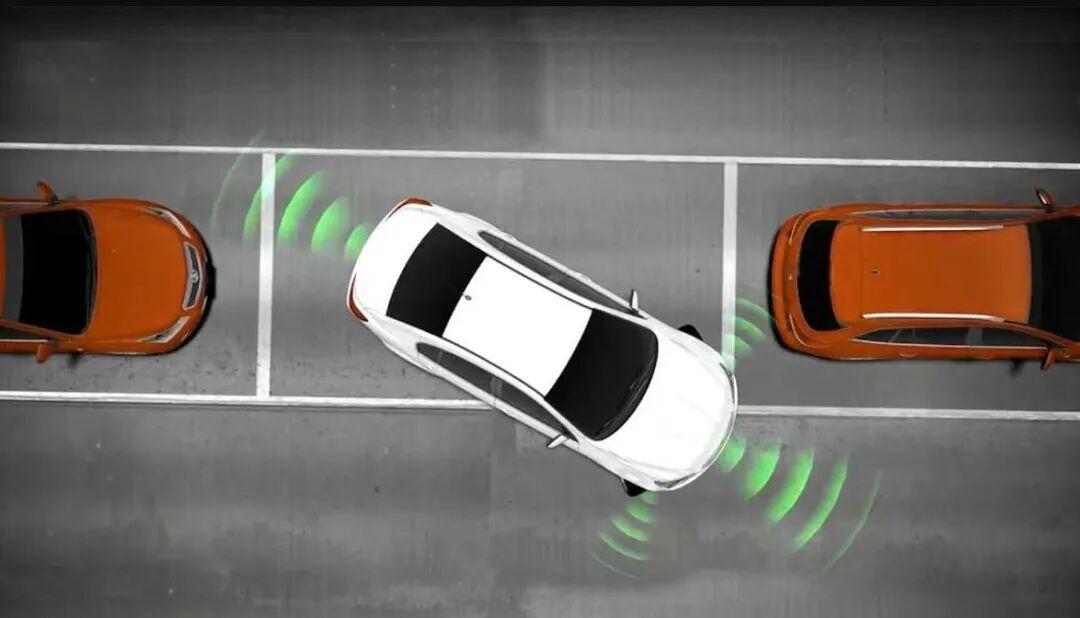
1.超声波雷达
这是最便宜、最普及的入门雷达,大部分车上都有。最常见的就是倒车雷达,自动泊车辅助雷达。工作原理是雷达发射超声波,碰到障碍物反射回来,计算时间差算出距离,原理和蝙蝠回声定位是差不多的。
它的成本极低,一个探头几十元就能买到。并且结构简单,不容易坏。探测距离还算精准,误差很小,不受光线影响,白天黑夜都能用。
它也有缺点,探测距离很短,最长不超过3米,超过就探测不到了。且速度快了也不行,反应不过来,只能低速使用。没法识别物体类型,只能知道后面有东西,分不清是什么。到底是人、车、墙还是花坛一概不知,不过这也不影响,因为不管是什么障碍物,都得停车。
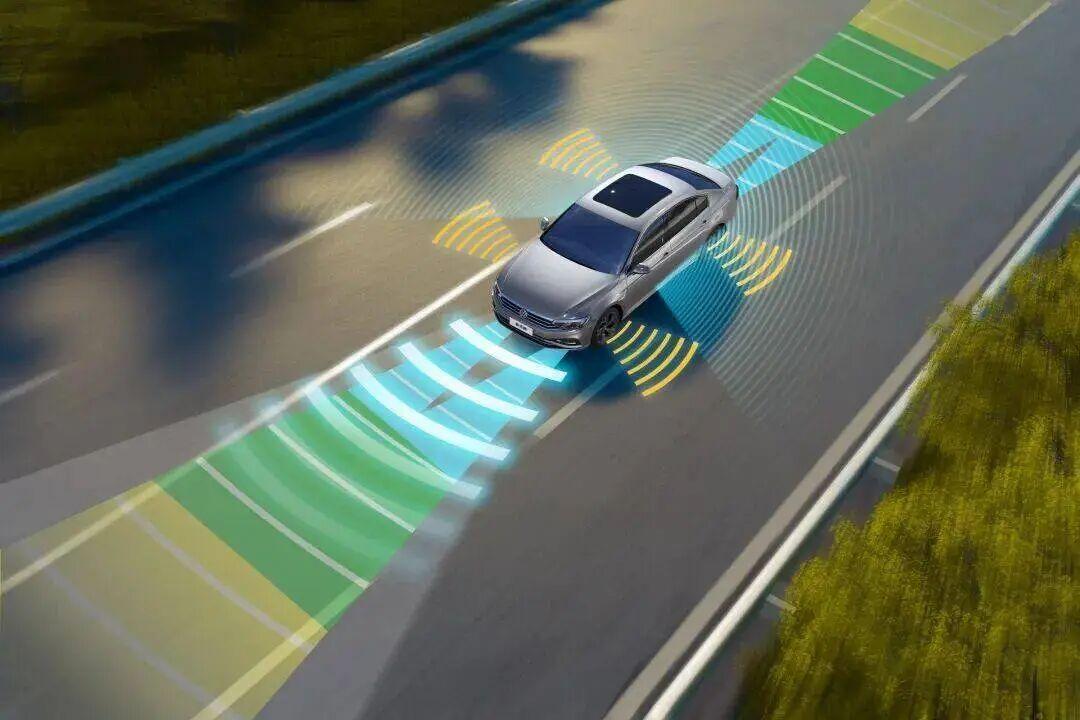
2.毫米波雷达
它是汽车辅助驾驶的中坚力量,配置稍微高点的车上才会有。一般藏在车标后面、保险杠内部,不用像倒车雷达那样突兀开孔。
最常见的功能是:自适应巡航ACC、前方碰撞预警FCW、主动刹车AEB、并线辅助、盲区监测、后方横穿预警,靠的全是毫米波雷达。
工作原理:发射毫米波电磁波,穿透性强,遇到车辆、行人、护栏反射回来,电脑计算距离、速度、相对位置。
它的探测距离就很远了,最远可达上百米。能测出相对速度,可以精准判断前车是减速、静止还是加速。下雨、下雪、大雾、沙尘、黑夜都能用,稳定性很强。
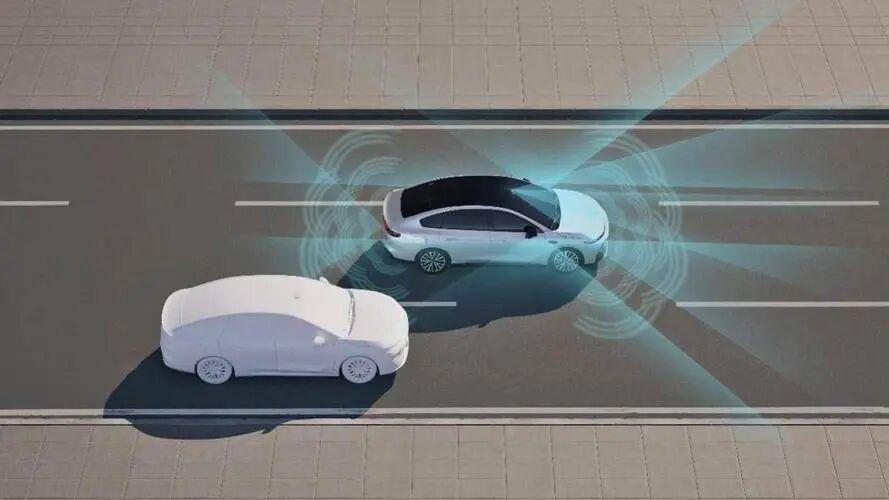
3.激光雷达
工作原理是发射激光束,快速360度或定向扫描周围环境,一秒打出成千上万个激光点,形成三维点云地图,把周边物体轮廓、大小、距离、位置全部建模出来。
最常见的功能是:城市NOA、高速领航驾驶、自动变道、避让障碍物、路口智能通行,全靠激光雷达。
优点是精度很高,厘米级测距,分辨率极高。能精准识别物体,分清行人、电动车、轿车、货车、路沿石、井盖。可构建实时3D环境,是高阶自动驾驶的核心硬件。
所以这三种雷达,没法说谁更好。因为它们不能互相代替,看似激光雷达挺厉害,但代替不了另外两种。低速倒车时,还得靠超声波雷达,和毫米波雷达。所以它们是互补的关系,各有各的用途。