如何看待把穿越机拿来与航拍机比较?
本文原名为:穿越机技术基础
作者:广西百色市右江区 郭远东
微信:bbsgyd
版本:V2026.1.8
前 言
欢迎踏入多旋翼穿越机的精彩世界!本文旨在为所有心怀憧憬的入门新手(或称“入坑小白”),构建一套关于飞行操控、硬件、软件、参数调整与解决方案的初级知识体系,助您轻松开启穿越机学习之旅。穿越机竞速与电子游戏竞技、机器人格斗并称为三大智能科技运动。它不仅是一项“人机合一”的体育竞技,更是一项富有魅力的电子科技实践。其核心归根结底是飞行,所有技术都为飞行服务,一切软硬件皆为飞行而生。因此,在往后的学习实践中唯有多飞多练,方能精进。
我们发现,许多新手对于入门所需的知识及动手方法往往不甚了解,容易忽略其中的一些关键环节,且在飞行操控、组装与参数调整方面经验几乎为零。对于大多数初学者,我们并不建议从自行组装飞机开始。降低入门难度,是保持学习热情、持续前行的关键。我们推荐的路径是:首先购置一套“到手飞”整机,从最基础的飞行操控入手;待熟练后再逐步探索组装方案、动手实践、调参试飞乃至“炸机”维修。由此一步步实现“飞、装、调、修”的多技能进步,真正融入穿越机的广阔天地。在设备选择上,初期无需追求顶级配置。鉴于新手阶段“炸机”风险较高,选择一款品质可靠、性价比高的设备,远比购入昂贵或劣质产品更为明智,初学者可使用2寸或2.5寸套机进行飞行练习,这能有效控制初期的学习与试错成本。
本文是作者基于亲身经历,将诸多环节的曲折“拉直”后的心得总结,对学习笔记进行了系统性的梳理与完善,保留了最必需、最核心、最易学的知识模块,力图再现一条高效的入门学习路径,整合成这份“穿越机技术基础”资料。期望能为后来的新手小白提供一种科学有效的方法,助你少走弯路、直抵目标,享受飞行的乐趣!
在穿越机领域从不缺少高手,但往往缺少给予新手一个有效开端的系统方法。这本应属于教育学的范畴,然而现实中,专注于穿越机基础入门研究的人寥寥无几。与此同时,专业的教育研究者又鲜少涉足此小众领域。这导致了新手们普遍面临系统性学习资料与科学指导缺失的困境。
对多数萌新而言,大脑中对穿越机相关技术的认知几乎是一片空白,缺乏必要的学习大纲、资料与实践指导,致使许多人的热情在起步阶段便无奈熄灭。我们清醒地认识到,穿越机技术最难的就是入门前那段最迷茫的时期,一旦成功入门,建立了基础认知并掌握了学习方法,后续的进阶之路并非遥不可及。若志在竞速,只要方法得当并勤加练习,便能取得佳绩;若钟情于花式飞行(花飞),其高难度动作则更需要反复的练习与磨合,许多精妙的操控技能,正是在一次次看似失败的“炸机”中锤炼提升的。
需要明确的是,本文内容严格限定于穿越机技术的基础入门阶段。真正精深的花飞与竞速,是建立在扎实入门基础之上的更高阶领域。对于萌新而言,首要目标是能够安全、稳定地将飞机飞起来。因此,本文并未深入探讨花飞的优美、竞速的快感、高端硬件的细腻手感或是复杂的PID参数与滤波分析,这些对于初学者而言为时尚早。
当萌新成功入门后,自然有能力前往欧美主流的开源平台获取海量资源,并找到属于自己的方向。
关于赛事,目前国内许多穿越机竞速比赛在公平性上存在争议,参赛与否可视个人情况而定。而国外的新资讯、新技术引入渠道仍相对有限,入门后的提升是一大挑战,这需要更多同好扮演“破界搬运工”的角色。如果你未来能在这个领域坚持下去,我们诚挚希望你也能成为这样一名技术添加者和发明者,为国内的穿越机爱好者社群带来新的养分,共同提升整体技能水平,服务大众需求!如果您有能力,更欢迎您参与或发起开源项目,让穿越机生态呈现百花齐放之势,同时夯实国内开源程序应用的群众基础,为我们未来在科技领域实现超越,贡献一份力量。
本文历经多次修订,力求内容精简完备、语言通俗易懂。针对穿越机飞行应用技术,我们摒弃了冗长的理论探讨与复杂的程序编译,极大简化了各种繁复的计算公式,希望让学习过程充满乐趣,从而消除新手的顾虑与犹豫,让大家能勇敢“入坑”,快乐“玩机”,真正体会到“技术为飞行而生”的宗旨。

文档开源说明:本文是开源的自由文档,对于个人用户而言,它是免费的,无需作者授权即可使用它。商业机构培训、出版物引用包含本文20%以上内容、图书出版发行、专业期刊等特殊用途需要作者授权。未经作者授权,你不能将它发布到互联网论坛、知识分享等网页中。本文唯一授权全球发布者为bbsgyd,本文未翻译中文以外语言,如需要请自行翻译。
穿越机技术基础目录
封面-----1页
前言-----2-3页
目录-----4页
穿越机技术基础入门学习大纲-----5-8页
第一章 多旋翼穿越机技术基础通识
第1节 穿越机的来历与应用发展-----9页
第2节 穿越机用途与分类-----11页
第3节 穿越机飞行的安全防护-----
第4节 穿越机的系统构成
第5节 机架、飞控、遥控、动力、图传与其他外设
第6节 系统性学习规划与萌新建议
第二章 多旋翼穿越机飞行操控基础
第1节 了解穿越机遥控器-----
第2节 穿越机遥控器摇杆练习
第3节 穿越机目视操控基础
第4节 穿越机FPV(第一视角飞行)操控基础
第三章 多旋翼穿越机组装技术基础
第1节 组装穿越机的准备工作
第2节 明确用途和硬件方案
第3节 组装机架
第4节 安装电调与电机
第5节 安装、设置飞控
第6节 连接接收机、图传、摄像头与外围设备
第7节 总调试飞
第8节 穿越机维修
第四章 多旋翼穿越机调参基础
第1节 下载并安装飞控驱动和Betaflight调参软件-----
第2节 设置页面 第3节 端口页面
第4节 配置页面 第5节 电力&电池
第6节 接收机 第7节 遥控器的设置
第8节 模式页面 第9节 PID参数设置
第10节 滤波器参数的设置 第11节 LED灯带的设置
第12节 电机设置 第13节 OSD屏幕叠加显示
第14节 黑匣子设置 第15节 CLI命令行的使用
第五章 多旋翼穿越机飞控固件升级与输入输出I/O配置
第1节 认识飞控软件-----
第2节 飞控固件的刷新
第3节 电调固件刷新与设置
第六章 多旋翼穿越机高级调参
第1节 穿越机飞控的PID调参-----
第2节 PID调参
第3节 RPM滤波器的使用
附件1:航空航天模型定义、分类与教育意义---96页
版本与版权说明-----97
(学习大纲)
穿越机技术基础入门学习大纲
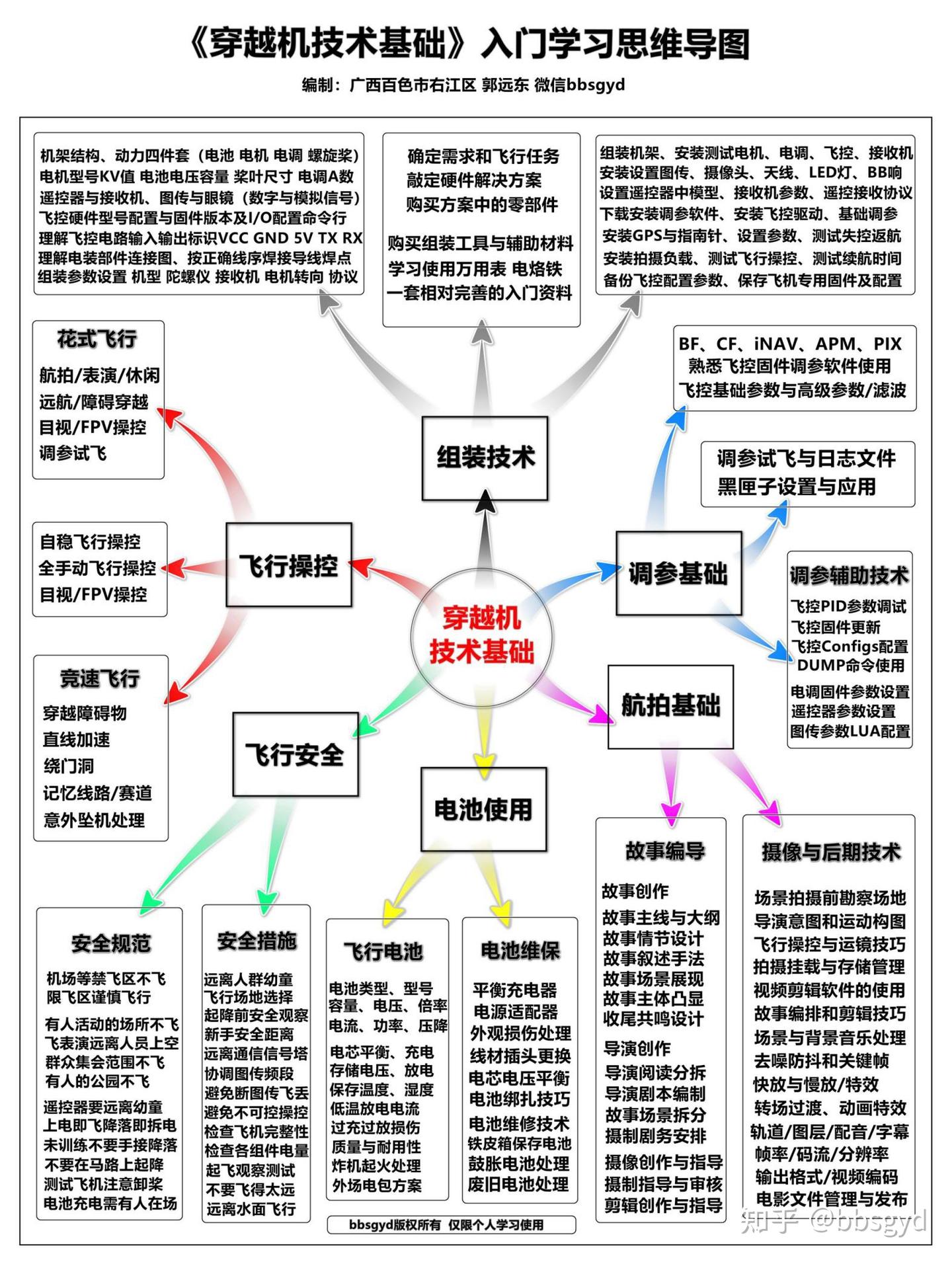
学习引导与思维导图
经过这几年的持续努力,穿越机技术基础从入门到提升阶段的系列学习资料已全面整理完成。为帮助萌新明确学习范围与方向,快速进入学习状态,把握重点与难点,在较短时间内实现有效入门,现对入门学习大纲进行重新编排、修订并正式发布。
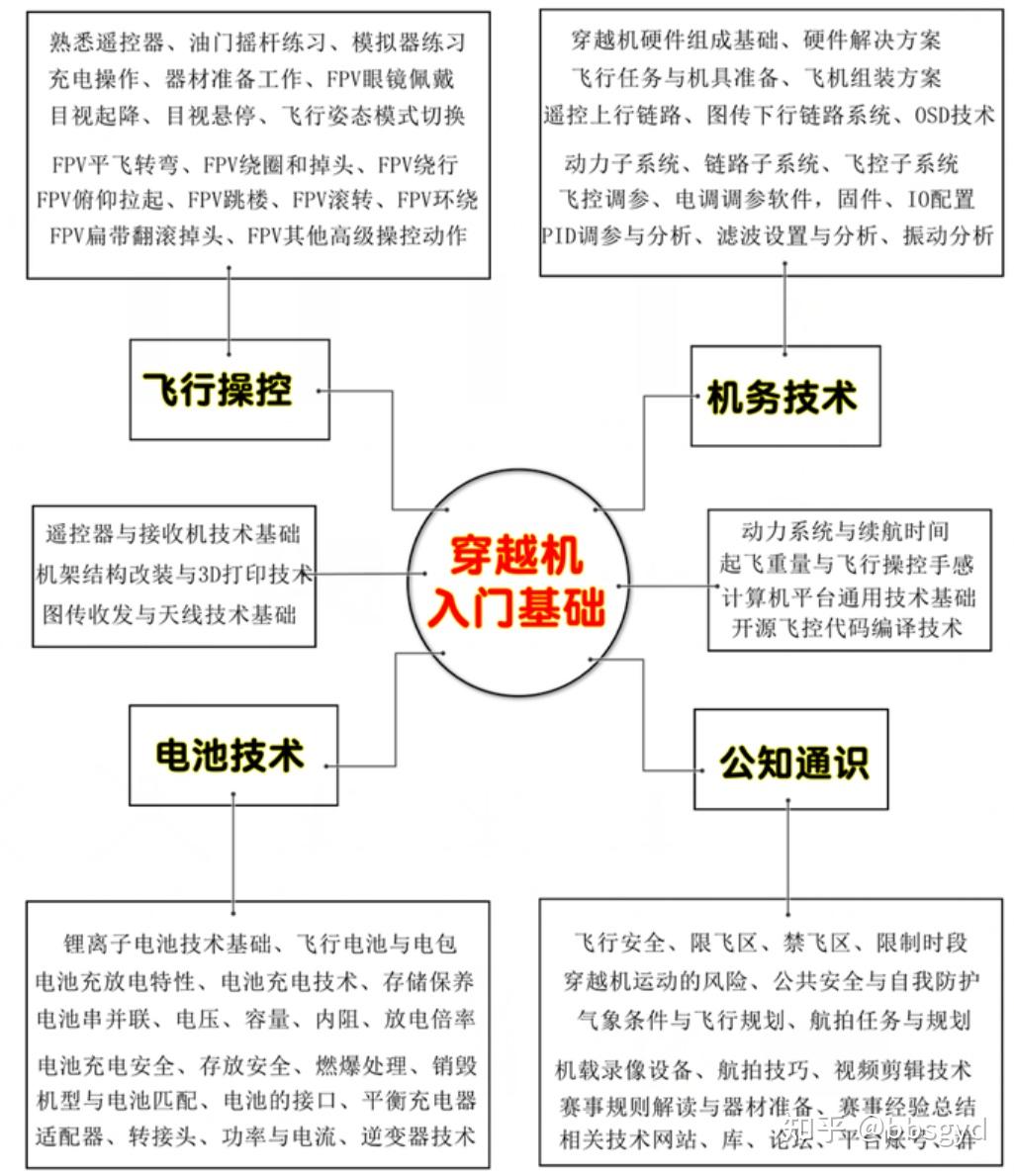
本大纲以郭远东编著的《穿越机技术基础》系列资料为基础,系统梳理为一份结构清晰的入门学习指引。萌新可依据大纲内容,科学使用配套资料,有针对性地开展学习,从而显著提升学习效率。如需获取《穿越机技术基础》系列完整资料,可通过微信联系作者获取下载链接,或在知乎平台搜索用户“bbsgyd”,根据大纲指引阅读相关文章。穿越机技术基础入门学习大纲,按以下逻辑框架对内容进行分类组织:入门阶段划分为飞行安全、飞行操控、组装技术、调参基础、电池技术、航拍基础六大模块;并重点围绕飞控单元、遥控单元、图传单元、外设单元、动力单元、调参方法、飞行电池等核心知识板块展开讲解,系统解决“入门阶段学什么、怎么学、如何掌握”的问题。学习过程中,建议认真做好笔记,并进行实操、复习巩固。
在正式开始穿越机知识学习之前,萌新应充分了解与穿越机相关的基本信息。例如:这是一项怎样的活动、适合哪些人群、是否有安全的飞行场地、是否真正适合自己等。穿越机学习需要一个相对长期的过程,整个项目涵盖的知识点较多,需要投入相当多的时间。在入门阶段,若每天能保持3-5小时的学习时间,一般可在3-5个月内完成;若每周仅能投入2-3小时,则入门周期可能延长至一至两年。除组装、维修等技术学习外,飞行操控练习同样需要大量时间投入。事实上,玩穿越机的绝大部分时间都在进行飞行训练,因为一切技术最终都是为飞行服务的,同理,飞得多了,也就能理解与飞行相关的调参和硬件方案,明白文档中的相关内容。
本资料合集所提倡的“先练飞行操控、再学组装维修、最后进行精细调参”的学习路径,符合从零开始的认知规律。新手只有在基本掌握飞行操控技能后,才能有效开展组装完成后的试飞工作;而熟练飞行之后,才能敏锐感知飞机是否存在问题、是否需要进行参数调整,这是一个环环相扣、循序渐进的过程。如果一开始就直接涉足组装与调参,不仅难以保证机具的组装质量,更无法判断参数设置是否合理。由于飞行技能不足,连基本的试飞都无法完成,极易导致学习计划受阻。许多中途放弃的萌新,正是被卡在了组装与调参环节。这一阶段涉及解决方案、电子基础、组装工艺、电脑操作、调参软件使用以及试飞等多重基础技能。初学时的理想很丰满,但往往因为某个小环节无法突破而产生畏难情绪,最终选择放弃。
穿越机入门学习如同跨越一道道坎,唯有不断突破、持续总结、逐步解决学习中遇到的各种问题,才能最终顺利打开穿越机飞行世界的大门。
(学习大纲)
(学习大纲)
第1章、穿越机应用基础通识
1)认识穿越机
对于初次接触穿越机的新同学,首先需要对其建立一个整体的认知,再决定是否深入学习和投入。穿越机目前仍属于一项小众科体活动,其技术门槛、时间与经济投入,以及对飞行场地的特殊要求,决定了其参与者有限。
参与此项活动,通常需要您具备一定的业余时间和经济预算;拥有较强的自学能力和动手意愿;并葆有勇于尝试、不畏困难的探索精神。此外,由于安全规范限制,许多城市区域禁止飞行,因此,一个开阔且合法的飞行场地是必备条件。建议在开始前,请务必审慎评估自身是否具备这些条件。
2)飞行安全与防护
安全是穿越机飞行的首要前提。新手在进行任何实际操控练习之前,必须系统学习并理解飞行安全规范,以预防潜在的安全事故。
安全意识应贯穿于每一次飞行活动的始终。飞行前,需谨慎选择合规场地,充分准备并检查器材性能;飞行中,务必专注操控,严禁将飞机飞越人群上空。详细的安全指南与最佳实践,请参阅《穿越机技术基础》资料包中的《穿越机入门基础》第一章相关内容。
3)穿越机硬件解决方案
获取一套适合的飞行器,是进行入门操控练习和相关技术学习的重要基础。针对不同情况的新手,主要存在以下两种硬件获取方案:对于动手能力强、喜欢钻研的同学,可以参照成熟的配置清单,自行采购零部件进行组装。这能让你在起点就深入了解飞机结构。对于绝大多数新手玩家而言,最直接、高效的方案是直接购买一套口碑良好的“到手飞”(RTF/BNF)入门级穿越机套件。这可以最大程度降低初学难度,让你能专注于飞行操控本身。
入门基础阶段,可以通过一些网站发布的资料来学习穿越机技术,如我爱模型(http://bbs.5imx.com/forum.php?mod=forumdisplay&fid=576)、FPV帮(FPV帮网址http://www.fpvbang.com)、知乎、优酷、哔哩哔哩、百度等。可参阅ima知识库《穿越机入门基础》相关的内容,穿越机技术知识库 https://ima.qq.com/wiki/?shareId=9cfd0c9e5d4a3ee58ccb0d1cd32bccc847c32060de9b519056ffe603beef308f。
第2章、多旋翼穿越机飞行操控基础
新手开始学习时,建议优先掌握飞行操控技能。首先应熟悉遥控器摇杆的作用于基本打杆操作,从最基础的目视与FPV模式的油门控制开始练习。待能够稳定完成起飞和降落后,再尝试让飞机直线飞行并安全调头。遵循这种由易到难、循序渐进的路径,能够有效减少不必要的“炸机”事故,从而节省资金与时间成本。飞行场地和机型选择需要重点考虑,在飞行练习中一定要谨记不飞远、不飞高原则。
第3章、多旋翼穿越机组装技术基础
在飞行操控技能相对熟练后,便可着手尝试组装一台入门级穿越机。
组装过程应遵循的步骤:首先确定飞行目的与需求(入门理解阶段),据此寻找并确定合适的装机硬件方案,最后再采购部件进行组装。“大厦将起,蓝图先行”,清晰的规划能有效避免资金和时间的浪费。
学习穿越机组装技术,需要系统了解几个核心模块的作用,与其他部件的连接技能。核心模块包含:遥控器与接收机、图传发射与接收机(模拟与数字系统)、飞控、动力系统、其它外设、调参软件以及电池配套系统等。
关于飞行电池,可参考《电池技术基础概念》或《机架、电机、桨、电池的相互关系》进行学习引导,并自行搜集拓展相关资料。电池知识关联到充电器与外场供电,需广泛了解不同用途中电池组具备的特性。更多关于遥控器的学习资料,可参阅《OPENTX开源遥控器的使用学习笔记》等与遥控器相关的文章。
第4章、多旋翼穿越机调参技术基础
在飞机组装过程中,便会开始接触飞控调参软件的使用。该软件用于设置飞控的基本飞行参数,特别是外部设备端口映射、陀螺仪安装角度、电机位置定义及转向、PID及滤波等基础配置。专门投入时间进行参数设置和实验是十分必要的。
具体操作可参阅《穿越机入门基础》第四章相关内容。在平时学习中若遇到不理解的专业名词,可查阅《穿越机入门常用名词理解汇集》一文以作参考。
若需要穿越机调参相关软件,可移步https://mklb.xyz/下载。
第5章、多旋翼穿越机飞控固件升级与I/O配置、电调固件升级
固件相关内容涵盖飞控驱动安装、固件升级准备、调参实际操作以及飞控I/O配置等内容。通过实例教学,引导新手熟悉飞控固件的应用流程。
如需对飞控进行固件更新,可参考固件使用相关章节。而涉及更深入的PID调校、滤波优化等进阶内容,则可参阅滤波相关章节内容。
第6章、航拍基础
穿越机飞行常与花式飞行(花飞)和动态视频拍摄紧密结合,这便涉及到航拍视频技术。若想将创意镜头付诸实践并达到理想效果,需进行周密的事前规划与现场勘测,设计好飞行路线与动作,构思画面构图,从而最终拍摄到想要的视频内容。

一个完美的航拍镜头往往需要反复尝试,可能因操作失误而重飞多次。因此,除了过硬的飞行操控技术,飞行路径、运动节奏与画面构图的前期协同规划,是成片质量的关键保障。飞手不仅需要将操控技术练至炉火纯青,还应主动学习影视拍摄相关知识,对穿越机主流摄像设备性能充分了解,选择适当的摄影摄像器材作为任务载荷,并通过大量的拍摄实践不断总结经验,提升摄像水平。相关摄像基础可参阅《视频剪辑基础》等内容进行学习。附上资料网盘分享链接,网盘链接:https://pan.baidu.com/s/1y0MKaKVrPO5qwMfYxmEFDQ?pwd=l1ay 提取码:l1ay
(正文)
第一章 多旋翼穿越机技术基础通识
第1节 穿越机的来历与应用发展
1)穿越机的前世今生
穿越机的概念最初源于固定翼航模。早期实践者在飞机头部安装前视摄像头与图像传输系统,构成了最初的FPV(第一人称视角)飞行系统,实现了在目视范围外进行遥控飞行。真正的转折点出现在2005年,随着微型电子陀螺仪等姿态传感元件的成熟,微型飞行控制器(简称“飞控”)的诞生成为可能,多旋翼飞行器开始从概念走向实用。又经过将近十年的技术积累,在全球众多爱好者与科研人员的推动下,多旋翼飞控技术取得了飞速发展。以QAV250为代表的多旋翼穿越机整机解决方案的出现,成为一个重要的技术爆发节点,极大地降低了入门门槛,吸引了大量玩家。自此,穿越机及其配套技术进入了快速迭代的创新期。


2015年后,穿越机竞速运动通过欧美赛事进入大众视野,标志着该项运动进入全新阶段。其中,以美国DRL为代表的专业赛事,成为全球最早、规模最大的穿越机专项竞赛,也为此后包括中国在内的诸多赛事提供了借鉴与创新的范本。
多旋翼飞行器能够飞行的根本在于其必须依赖飞控。飞控通过电子姿态传感器实时感知飞机状态,经过高速运算后输出控制信号,精准、快速地调整各个电机的转速。电机带动螺旋桨产生差异化的升力,从而使飞机能够稳定保持既定姿态,响应操控者的指令。如果没有飞控的介入,仅凭人脑判断和手部操控,根本无法实现多电机转速所需的微秒级快速协同调整。
历史上曾有人尝试制造以汽油发动机为动力的多旋翼飞行器,但最终失败,其核心原因就在于汽油发动机的转速响应速度太慢,无法满足多旋翼飞行器姿态平衡所要求的瞬时调整条件。而如果单纯以人的反应去平衡多旋翼飞行器的姿态,也无法满足高频调整的要求,没法进行升空、悬停、位置移动的控制。
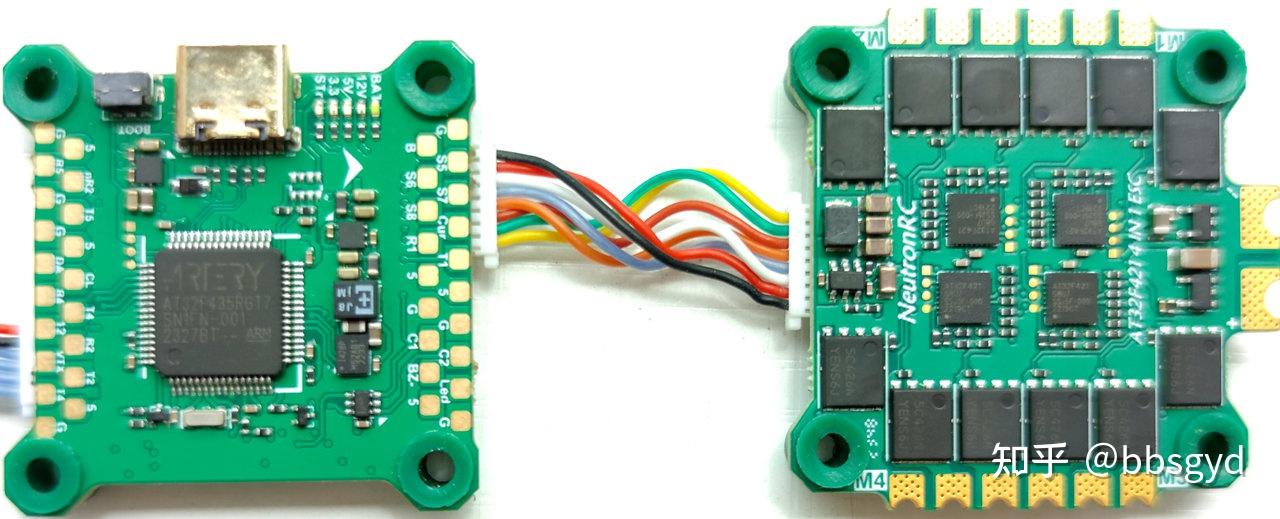
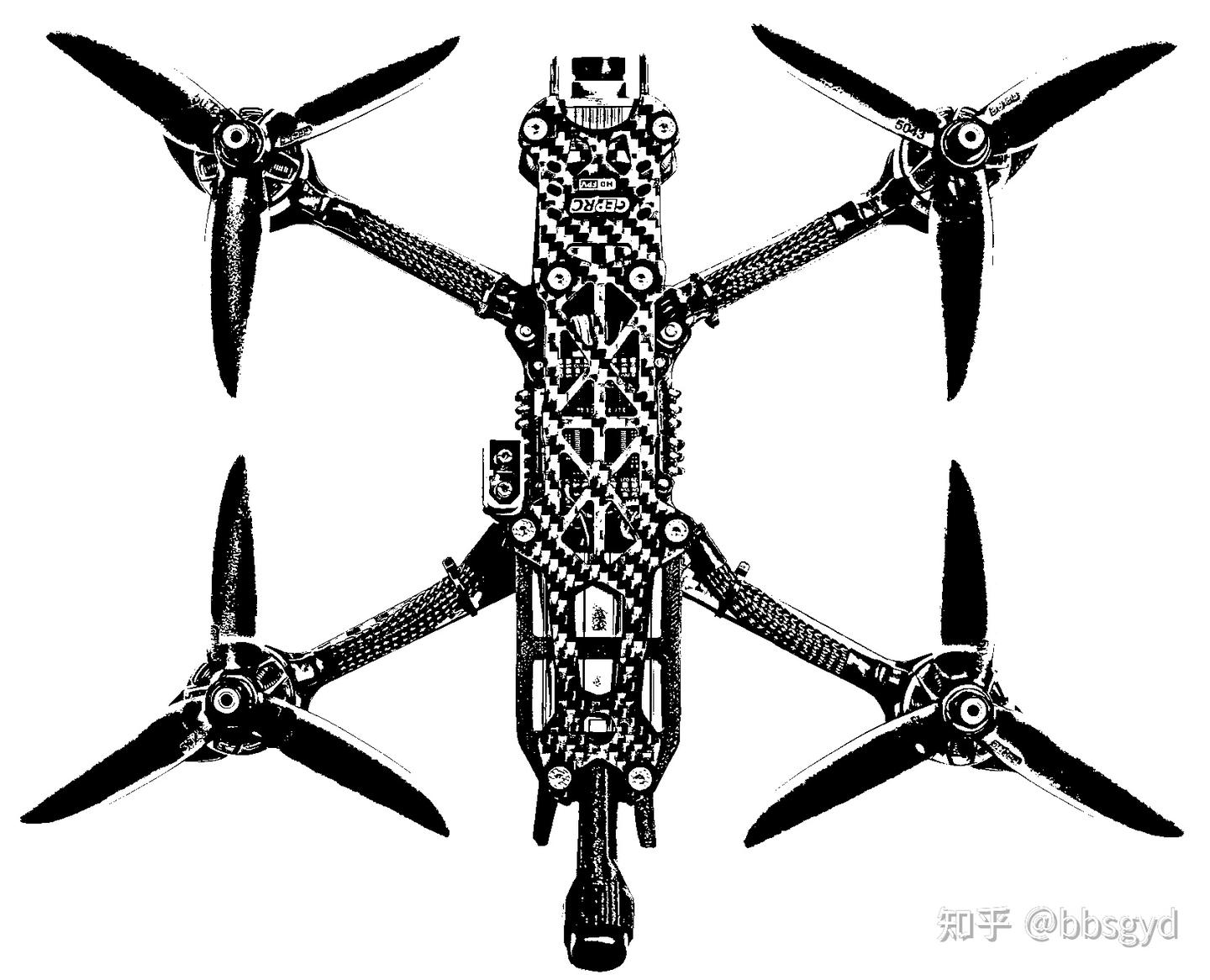
飞控是多旋翼飞行器的灵魂(纽创AT32F435飞控+纽创4合1电调)
随着高度集成的单片机与传感器配套技术的成熟,标准化飞行控制器的实现成为可能。各类紧凑型飞控电路板历经多次迭代与优化,飞控电路板的尺寸逐渐由早期的自由规格演进为系列化标准,最终促使安装孔位为30.5×30.5mm飞控板成为小型多旋翼穿越机的标准配置,更多常见标准尺寸如16×16mm、20×20mm、25.5×25.5mm(26.5mm)等适合安装在3寸以下穿越机上。标准化不仅降低了应用难度,也推动了生产成本的逐步下降,使产品性价比日益突出,吸引了越来越多的用户。
同时,飞控固件也从原本面向专业开发者的“极客模式”,逐步转向更易上手的“业余玩家模式”,例如 Cleanflight、Betaflight和iNav等固件的广泛应用。大量用户的参与,进一步促进了技术研发与生产制造的进步,缩短了产品与技术的迭代周期。更廉价、更可靠的飞控产品不断涌现,从而推动了整个穿越机技术的蓬勃发展。
2)技术演进与未来展望
飞控固件:飞控单元是穿越机不可或缺的核心部件,而运行在飞控硬件中的固件,则是其真正的“思想灵魂”所在。目前CF、BF、Inav、APM、PIX、AP等开源固件,已成为多轴飞行器的主流固件,这些技术迭代预示着穿越机技术未来发的展方向。
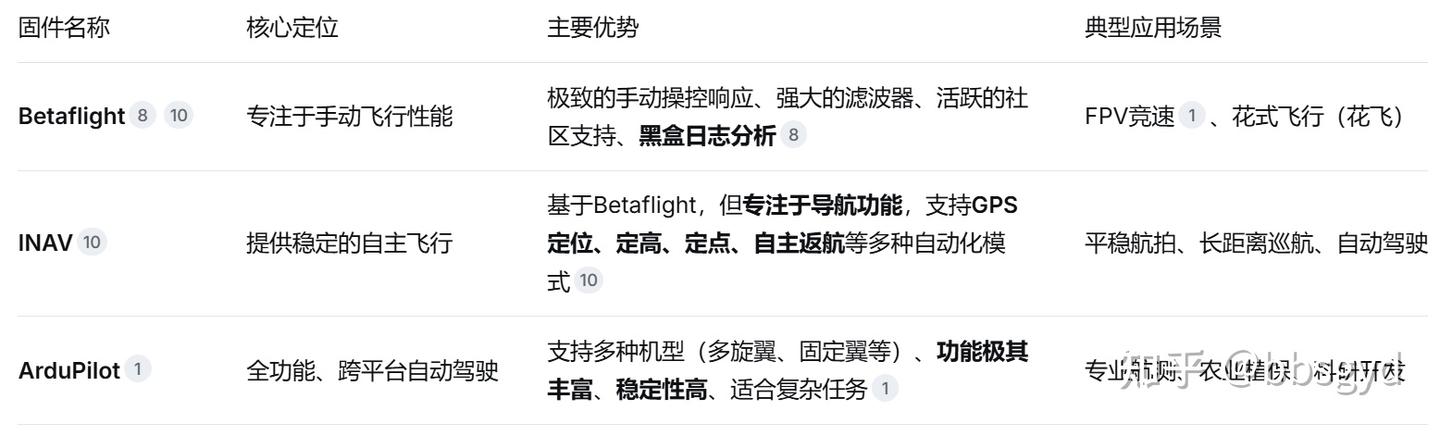
电调固件:要让电机发挥出最佳性能,除了飞控固件,电调(ESC)固件也很重要。BLHeli_32 和 AM32 是当前主流的两种电调固件。例如,好盈科技就将部分竞赛级电调的固件从BLHeli_32升级到了开源的AM32,以获得更快的技术迭代,让电机输出效率更高,从而获得更大功率输出和更精准的电机控制。
硬件趋势:飞控硬件也在不断发展,性能更强的STM32H7系列主控芯片正逐渐普及,更高的处理频率支持更复杂的算法,为未来固件功能的提升打好了硬件基础。
2020年,中国深圳的大疆创新发布了数字化的穿越机图传与遥控系统,推动了整个行业从模拟图传向高清数字图传的跨越。这一变革正在系统性解决传统模拟图传在清晰度、延迟和抗干扰方面的痛点,使穿越机图传生态发展步入快车道。

DJI大疆第一代穿越机图传套件
未来,随着数字图传等核心技术的日益成熟,穿越机将朝着高度可靠性与极致集成化的方向演进,逐步实现广大玩家对高清晰、远距离、低成本的普遍追求。

大疆DJI第一款FPV穿越机
3)当前的学习环境与本文的价值
得益于日益增长的玩家群体,穿越机的软硬件技术正处于高速发展和持续迭代中。上游的研发与生产空前活跃,然而在下游的应用环节,特别是在学习资源的获取上,情况却不容乐观,新手玩家常常面临“无从下手”的窘境。尽管市场需求旺盛,但玩家多为业余爱好者,整体技术水平有限。互联网上的现有资料大多呈现碎片化、缺乏系统性的特点,难以形成有效的入门学习路径。
正因如此,本文的系统性梳理显得尤为重要。各章节所涵盖的跨学科知识点,旨在满足穿越机新手阶段系统学习的需求,能够显著减少初学者自行摸索的时间与试错成本,加速入门进程,对穿越机应用群体的壮大与新技术普及具有积极意义。
第2节 穿越机用途与分类
穿越机,常被誉为“空中F1”,以其极致的速度与操控感,为参与者和观众带来肾上腺素飙升的刺激体验。其应用领域广泛,主要涵盖FPV体育竞速、FPV花式飞行、目视花式表演,并延伸至航空摄影、科学研究、军事侦察与目标搜索等专业领域,是一项融合了高新电子技术的新兴体育运动。
1)FPV竞速
FPV竞速赛通常在设置有多重障碍门的专用赛道上进行,选手需连续完成多圈飞行,以用时最短者获胜。比赛所用机型轴距多为186-230mm,配备5英寸螺旋桨,并普遍采用模拟图传系统,以保证画面低延迟和多接收机广播接收。
为确保公平与安全,赛事有严格规定,赛前所有飞机须统一调试并保管;比赛中,未上场的选手严禁开启设备,以避免图传信号相互干扰。若比赛中飞机意外坠落但仍能通过遥控器恢复飞行,其比赛成绩依然有效。
赛事体系依据规模可分为专项赛、省赛、国赛、区域赛乃至全球赛,通常以系列分站赛的形式在不同城市巡回举办。赛事奖金因组织方而异,顶尖选手除奖金外,更多通过为硬件产品代言获得持续收益。

2)FPV花式飞行
FPV花飞专注于飞行本身的艺术性与表现力,常在废弃厂房、自然景观等复杂环境中进行,或用于追逐赛车、帆船等运动目标。通过挂载运动相机,它能拍摄出极具临场感的追逐、环绕、穿越、极速升降等电影级画面。
为保障飞行安全,花飞载机常配备GPS定位单元,在遥控信号丢失时可自动返回起飞点附近30米范围内,有效防止飞丢。
此外,3英寸及以下的微型穿越机因体积小、重量轻,并常配有桨叶保护圈,其安全性大幅提升。因此,圈圈机也成为许多萌新首选的入门练习器材。
新手为什么选圈圈机?
圈圈机的核心优势是安全,既保护飞机本身,也降低了对周围环境和人的意外伤害风险,适合在小区、小公园等非专业场地飞行。

适合萌新入门的达尔文CineApe20套机组合
作为练习器材,它能让新手专注于飞行技巧,减少因频繁炸机而修机的时间和经济成本。适合用于公园、室内运动场、受限飞行环境的2寸圈圈机,是萌新入门首选,如达尔文CineApe20套机组合的安全性和极致性价比,是不可多得的优秀器材。
3)目视花式飞行
目视花飞要求飞手在第三方视角下,完成一整套复杂的横滚、翻转与优美航线动作,其操控难度极高,堪比固定翼特技飞行。练习过程中,因思维与操作稍有迟滞便极易导致坠机。尽管如此,它所展现的类似于直升机的纯粹机械操控感,依然让众多玩家乐此不疲地投入“炸机-维修-复飞”的循环中。此领域机型多样,轴距从5英寸直至1米以上不等,飞行创意无限,真正实现了“只有想不到,没有做不到”。
4)教育价值
穿越机运动是一项长期的科技实践项目,青少年在学习过程中,不仅能掌握飞行技术,更能深入理解编程、自动控制、机器人等前沿知识,从而显著提升未来的职业竞争力和择业范围。整合跨学科知识应用的穿越机运动项目,是开展青少年科技教育的优秀载体。Betafpv的Aquila20套机具备定高悬停功能,对新手更友好。

第3节 穿越机飞行的安全防护
1)核心安全认知
穿越机具有显著的惯性动能,其高速旋转的螺旋桨叶片具备极强的物体切割能力。一旦在飞行中撞击人体或桨叶直接接触人体,均可能造成严重伤害。

运动能量装机和高速旋转的桨叶具备伤害动能
因此,飞行前必须充分掌握安全规范,切实防范因失控引发的人身伤害风险。
2)基本飞行守则
开展穿越机飞行应始终遵循以下原则:
2-1)机型选择:微型化,达尔文CineApe20套机,Betafpv的Aquila20套机。
2-2)场地选择:于室外无人空地,远离市区,室内专用场地,竞赛训练场地。
2-3)禁飞区域:远离民用和军事机场禁飞区等。
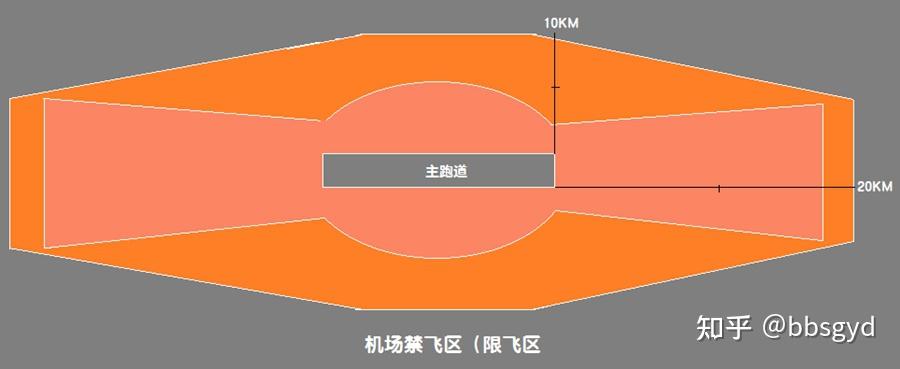
严禁在机场净空区、政府办公区域、敏感单位、重要基础设置,监狱、军事管理区、边境地带、化工厂、发电厂、变电站、港口码头、学校校园、居民小区、群众集会现场、人流密集的公园以及其他明令禁止飞行的区域飞行。
2-4)飞行前检查:每次起飞前检查机体结构、电池状态、桨叶完好度及电机性能,以及遥控器电量、天线、工作状态,确保天空端、地面端设备处于完好状态。
2-5)起降规范:遥控器与飞机连接正常,测试电机启停操作良好,起飞与降落时确保飞机与操作者保持5米以上距离,并使机尾朝向飞手方向。
2-6)意识培养:从初学阶段即重视安全意识养成,将规范操作融入飞行习惯。
3)关键注意事项
区域管理:合理选择飞行区域是保障安全的基础,避开人群、严守禁飞规定。
调试安全:在进行飞行参数调试时,必须提前拆卸螺旋桨,或将机身可靠固定于重物之上,严防调试过程中设备意外启动发生伤害事故。
4)人身伤害预防
飞机降落时,严禁徒手接机,以防高速旋转的螺旋桨或机体惯性对人体造成伤害。尽管近年来穿越机安全共识不断增强,但因设备失控导致的伤人事件仍时有发生,飞手要谨记:电子设备的可靠度从来都不会达到100%。多数事故源于违规操作,印证了“侥幸心理是安全之大敌”的教训,而这些经验的获得往往伴随着不可挽回的损失。


5)设备操作与场地管理
电机解锁后,操作者不得放下遥控器从事其他活动。如需暂停飞行,须立即锁闭电机。遥控器应放置在儿童无法触及之处,防止顽童误触引发事故。
建议遵循“上电即飞、落地即断电”原则。飞机通电后应迅速起飞,降落后第一时间断开动力电池,以保障操作者人身安全。外场飞行时,禁止他人接触处于联机状态的遥控器,如遇到好事者抢夺遥控器,要第一时间迫降或置瘫飞机。
禁止在围观人群附近进行特技飞行等高风险展示,公开表演需事先周密组织,并设置完善的安全防护措施。
**14岁以下未成年人操作穿越机,须有专业人员在现场指导与防护**
6)电池使用与应急处置
电池因飞行摔损须单独存放,避免短路引发连锁燃烧,用铁皮箱装电池。
电池着火时可丢入水中降温或用干粉灭火器扑救,并迅速移开周围易燃物。
电池外壳多为铝膜材质,燃烧时即破裂泄压,通常不会爆炸,但仍需规范处置。
电池充电过程中必须有人看守,以防火灾发生,这是多起事故总结的宝贵经验。
以上安全规范凝聚了航模界玩家的大量实践教训与经验总结,敬请严格遵守。
第4节 穿越机的系统构成
1)硬件组成
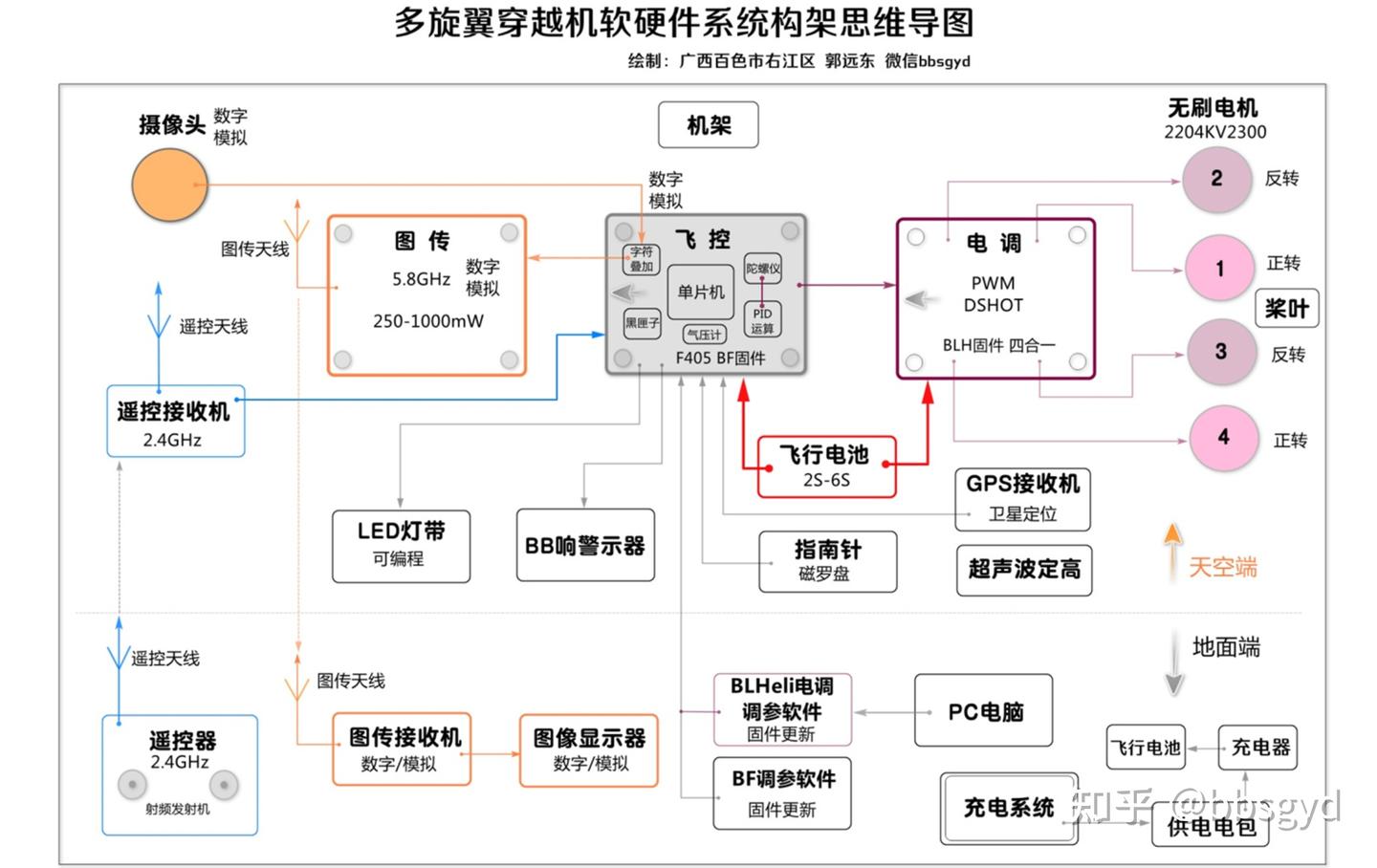
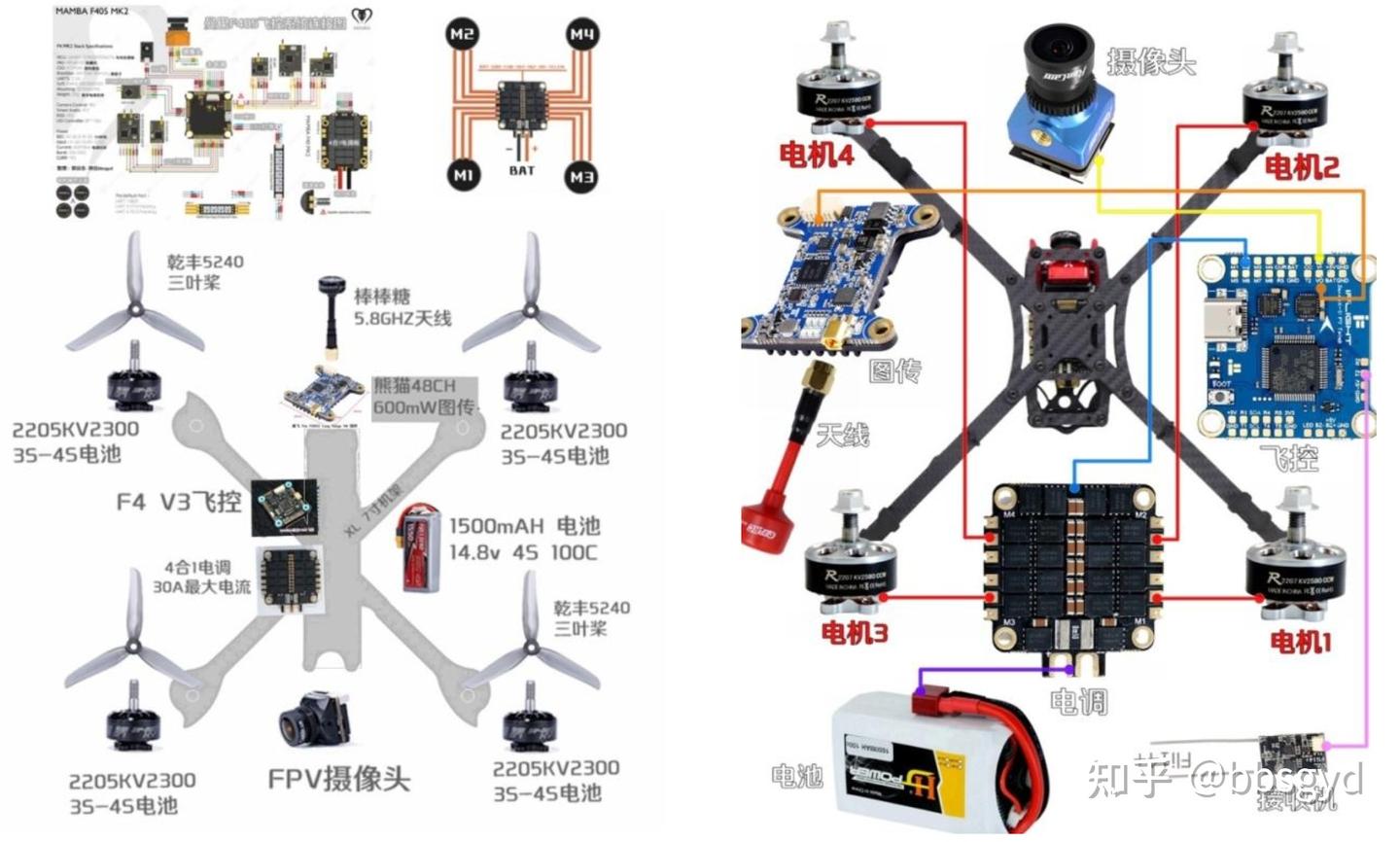
穿越机天空端主要包括:机架结构、飞控电路、遥控接收、动力单元、图传发送单元、摄像头单元。
穿越机地面端主要包括:遥控器单元、图传接收单元、显示器(眼睛)单元;还包括户外电池供电系统、充电单元、定向天线支架等。
2)系统装调流程
硬件组装包括机架搭建、电子单元装配,硬件组装完毕后需进行参数设置。
调参时通过数据线连接飞控与电脑,运用固件配套的调参软件设置飞行参数。
试飞过程中需通过黑匣子记录陀螺仪数据,据此绘制PID阶跃响应曲线,反复调整直至参数与飞机动力特性匹配,再进行滤波参数设置,最终完成系统装调。
3)软件配置要点
调参前需为飞控刷写专用固件(常用如Betaflight、iNAV、Fettec Alpha等),并通过对应调参软件完成参数设定,才能使飞机正常飞行。
4)技术特点与操作要求
穿越机可视作精简版多旋翼飞行器,其省去了部分智能飞行控制模块,保留必要飞控组件,系统更为简洁。这也意味着飞行全程需由人工直接操控,无法依赖自动定高、定位、避障及返航等功能自主控制,因此对操作人员的技能要求较高。
受风速、陀螺仪加速度计误差影响,穿越机起飞后易发生漂移,对新手极不友好。建议入门练习中,由熟练飞手现场指导,重点进行油门操控防护,预防飞行意外。
第5节 机架、飞控、遥控、动力、图传与其他外设
1)机架结构
机架作为飞控与动力组件的承载平台,其设计需综合考虑重量控制、碳板加工公差、结构谐振、强度要求及电路安装空间等基础要素,部分设计还会引入空气动力学优化与扩展功能组件的安装位。

为辅助安装天线、摄像头与图传等部件,常配合使用3D打印定制件。机架设计亦需统筹电池挂载位置与整机重心分布,部分型号会配备小型起落架。
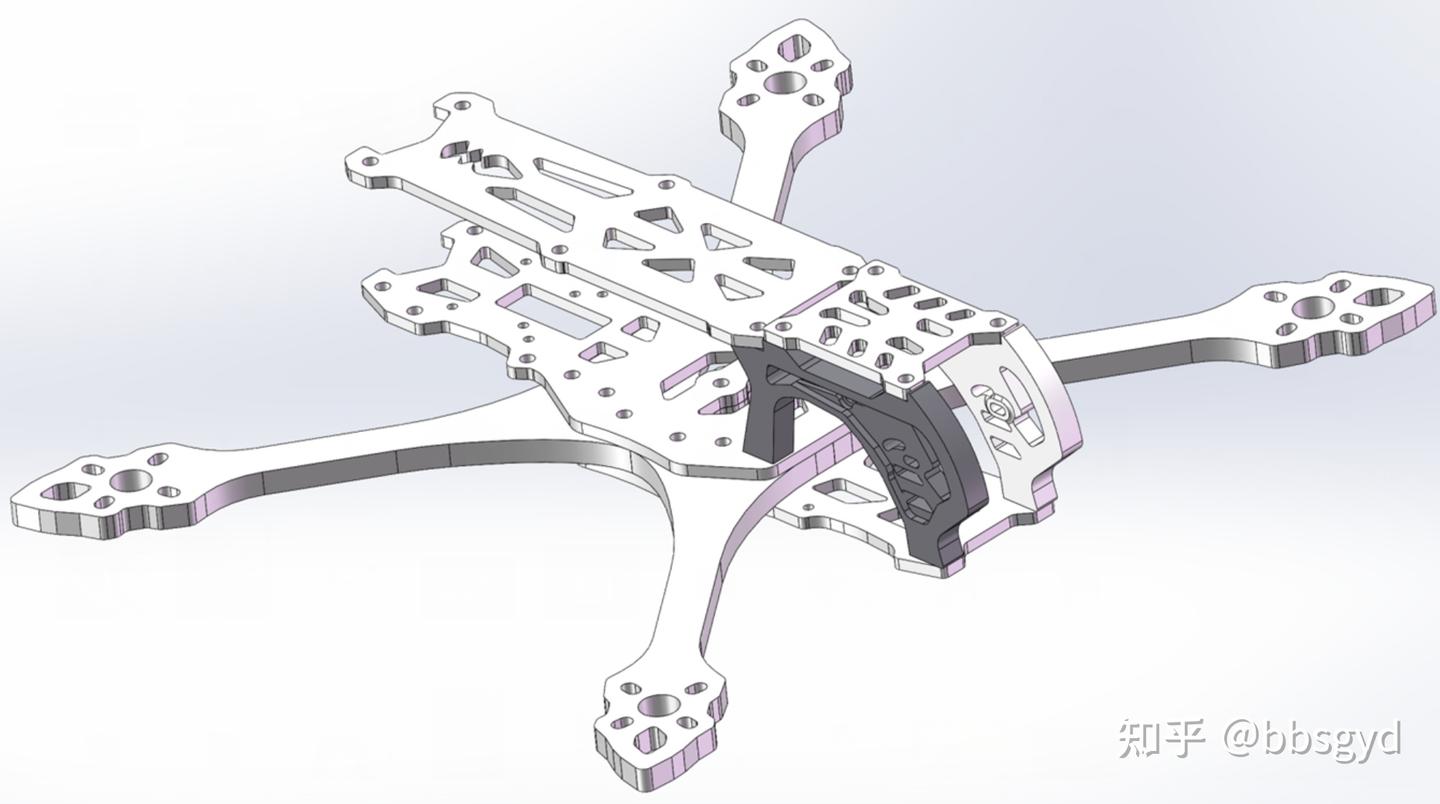
典型穿越机机架由上、中、下三块中心板与机臂构成,部分机架还增加了侧面立板,左右部件采用碳纤维板材切割成型。中心板厚度一般为1~3 mm,机臂厚度为3–6mm。上、下中心板之间通过铝柱连接,并以扭矩为12 N·m的M3螺钉可靠固定。
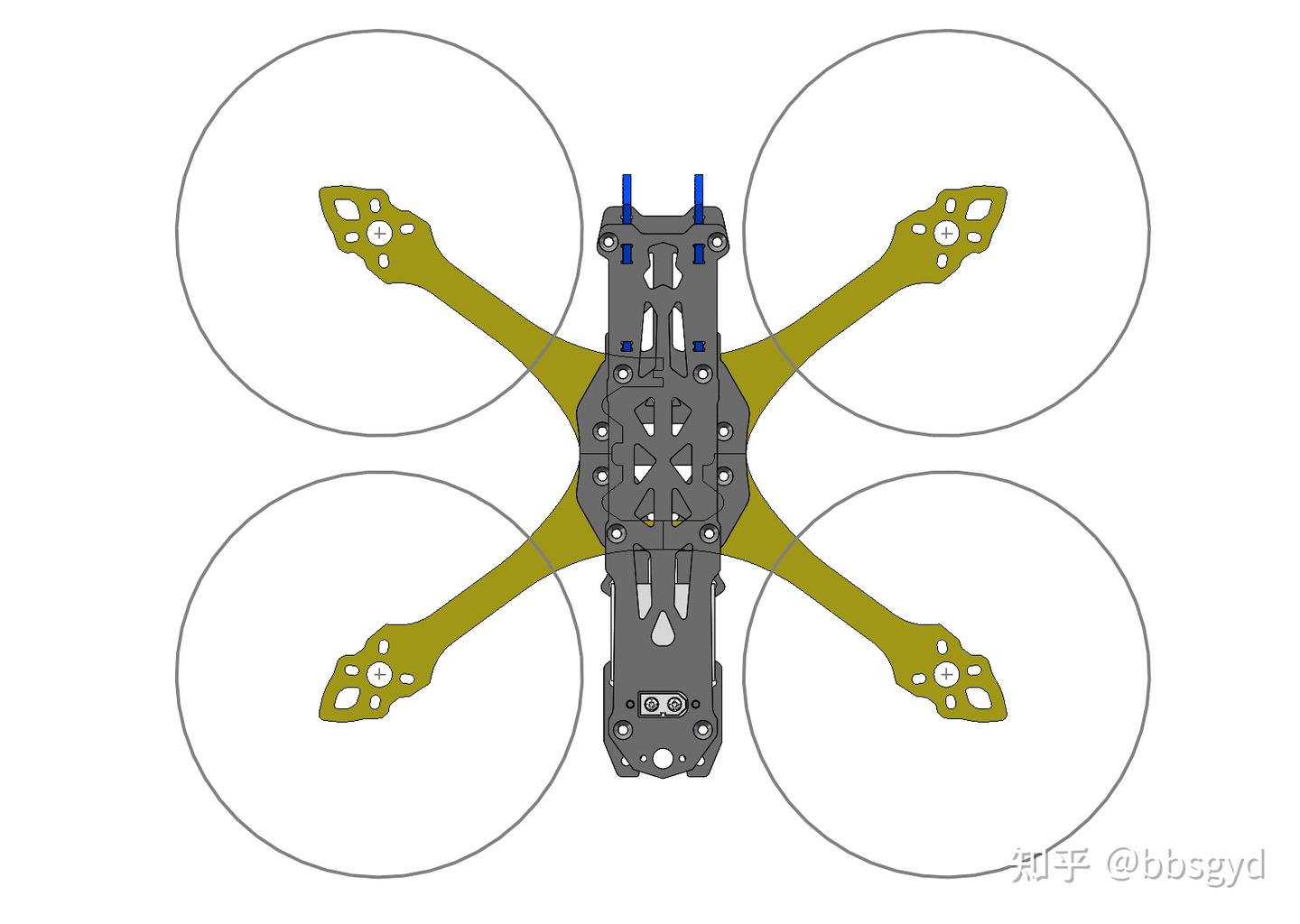
竞速机型:普遍采用5英寸桨叶规格,机架追求极致轻量化与紧凑轴距(5寸极限为186 mm),同时需做风阻设计优化,并保证一定的耐冲击性能。
花飞机型:常用3~6英寸机架,重量需控制在合理区间。过轻或过重均不利于动作表现。适当配重可增强惯性动作幅度,常选用宽X型布局以减少螺旋桨入画面积。
异形机架:如DC型结构,可将螺旋桨完全排除于拍摄画面,但调试复杂,PID整定难度较高,不建议新手选用。
2)飞控单元
飞控的核心电路集成模块,主要包括单片机、6轴陀螺仪(三轴姿态+三轴加速度计)、BEC电源、电压(电流)传感器、OSD字符叠加芯片与黑匣子存储器,并预刷写飞控固件系统。为简化安装,厂商常推出“飞塔”结构,将飞控与四合一电调叠层集成。部分AIO(All-In-One)飞控更进一步集成图传发射与接收机,适用于空间受限的小型穿越机。
飞控单片机需刷写固件以实现控制功能,Betaflight Configurator为当前主流开源调参平台,为BF固件配套调参软件;STM32架构飞控亦可刷写iNAV等固件(注:iNAV已被大疆收购,授权政策或有调整)。


不同厂商的飞控在I/O定义与布局上存在差异,但核心功能组件基本一致。高端F7主控飞控凭借更高主频,可实现更低延时与多任务并行。部分型号搭载双陀螺仪,支持模式切换或数据融合以降低噪声,但可能占用SPI/DMA资源,影响OSD等功能。
3)遥控单元
遥控系统由地面端的遥控器与飞机端的接收机组成,它们构成指令传输链路。
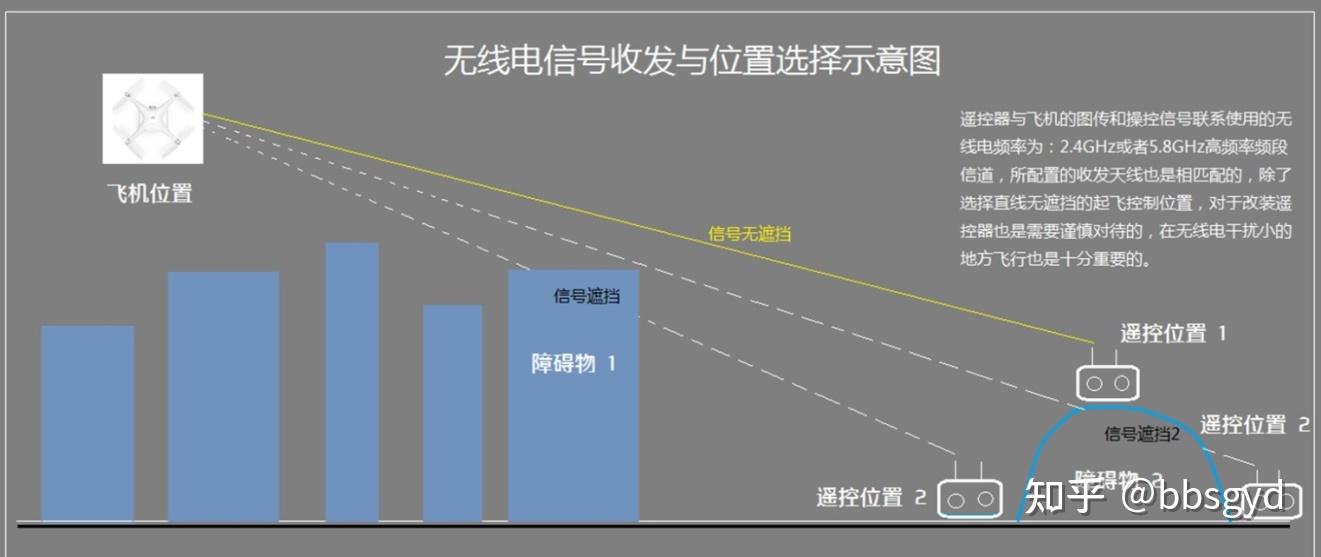
通信距离取决于底面端的发射功率与接收机灵敏度,高增益天线可提升双方信号强度,制高点起飞有助于减少遮挡、改善无线电通信质量。飞行区域远离通信基站。
控制穿越机至少需要6通道遥控,建议配置8~16通道。1~4通道是摇杆指令,5~16通道为AUX辅助功能控制。开源多协议遥控器支持与多种协议的接收机对频,具备更强兼容性。当前主流为ELRS协议,具备高编码速率与远距离通信优势。接收机需匹配遥控器协议,常见编码技术包括PPM、SBUS、CRSF等。天线类型影响信号稳定性,全向天线为飞机端常用,地面端可搭配定向天线以增强信号。

4)动力单元
动力系统由电池、电调、电机与螺旋桨构成。
4-1)电池:采用锂聚合物电芯串联而成,需使用平衡充电器维持电芯的电压一致性。常见损坏原因包括摔损、电芯质量不佳、组装制作工艺欠佳,过充(过放)以及满电、高温长期存放。
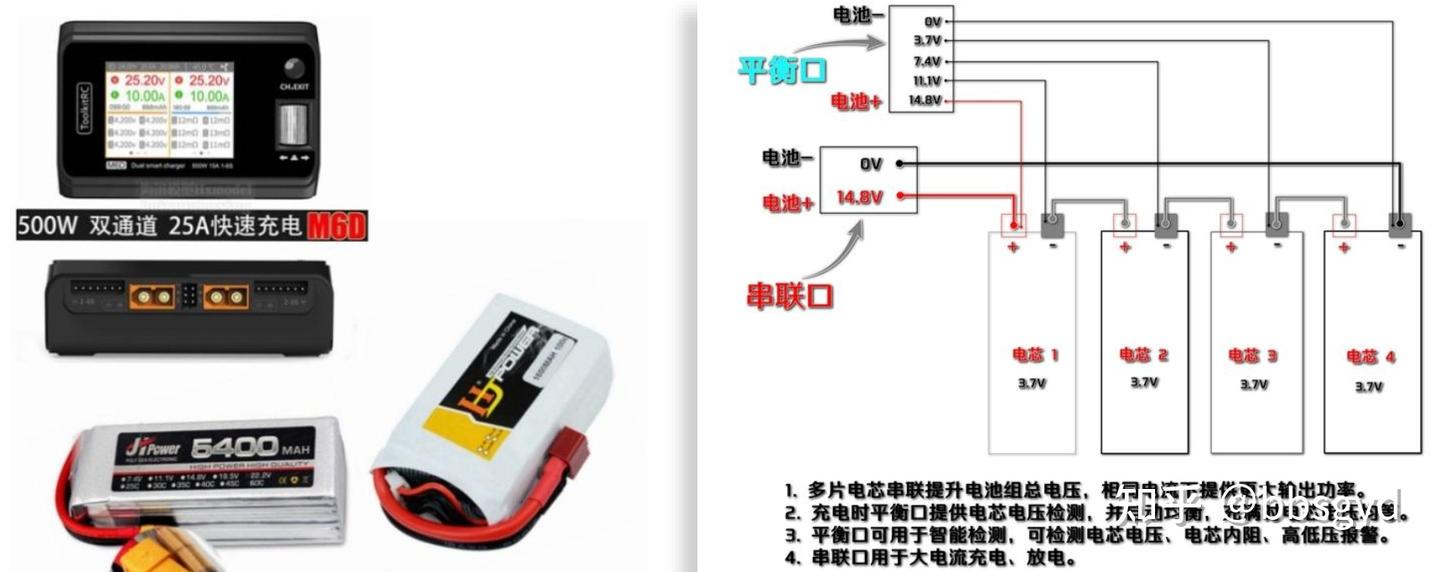
穿越机飞行电池组与平衡充电原理
4-2)电调:接收飞控指令,调节电机转速。选型需满足最大电压与电流需求,保留适当余量,电调最大电流应当是电机最大电流的3倍。
4-3)电机与桨叶:机架尺寸决定最大桨径,动力搭配需综合考虑推力、整机重量与电池性能。电机的转速/分参数决定了配套电池的电压,也决定了桨叶匹配尺寸。
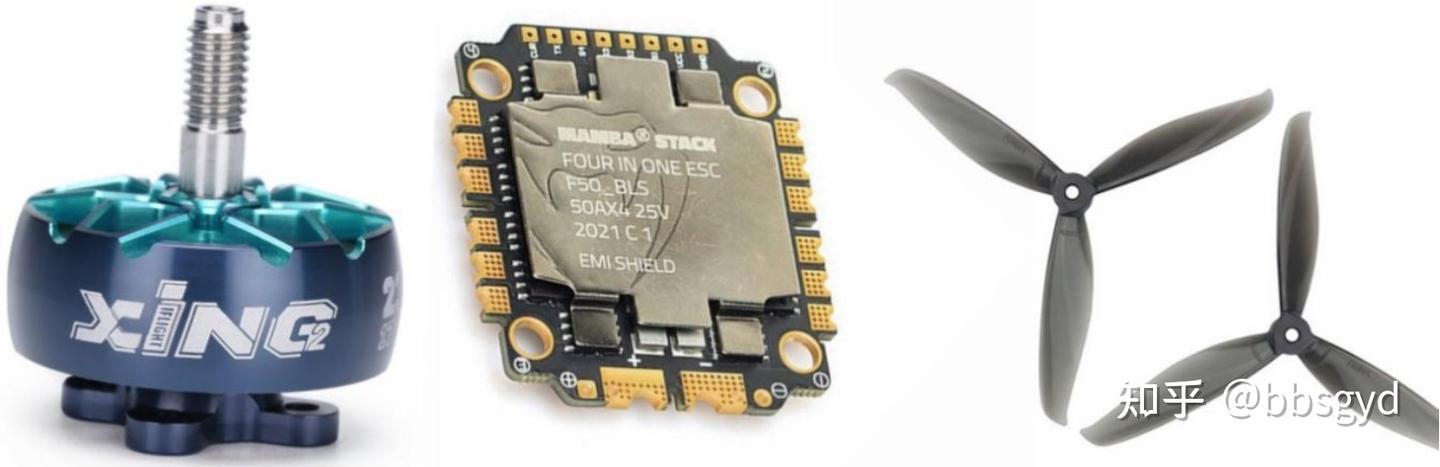
动力系统构成-电机、电调、螺旋桨
4-4)电池使用要点:电池组有多个独立电芯串联组装而成,航模锂电池组内部通常没有设置智能保护电路,以便更大电流放电和降低成本。

飞行电池与平衡充电器
飞行锂电池的电芯标称电压通常为3.7V,充满为4.2V,放电截止3.2V左右。锂电池的充电由智能平衡充电器保证电芯之间压差均衡,放电时则需要人为监控,通常穿越机电池的电芯电压降到3.6V时,已经无法继续飞行,需要尽早降落避免过放。
飞手在飞行中需要实时监测电池电压,设置电池低压报警(建议3.6–3.7 V/cell),低压报警立即返航降落避免炸机事故。低温环境下电池性能下降,建议预热至15°C以上再飞行,避免欠功炸机。
锂电池长期存储电压以3.75~3.85 V/cell为宜,环境温度建议5~35°C;
锂电池充电截止电压严格控制在4.20 V/cell,电压过高将缩减电池寿命;
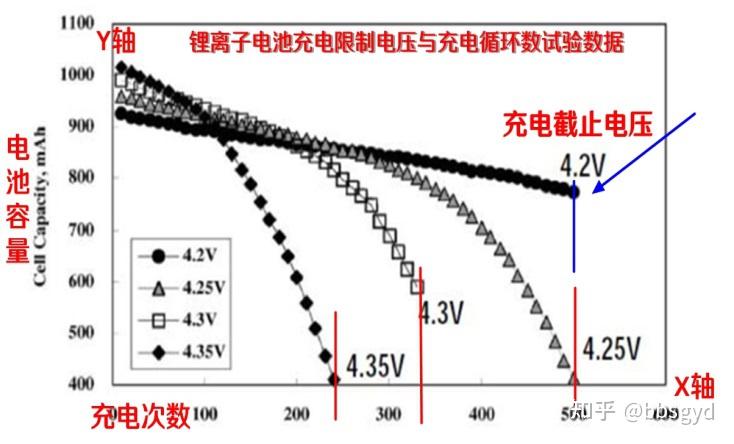

充电截止电压与循环次数及容量变化 XT60电池插头
大电流机型建议选用XT60插头,支持持续60A、瞬时90A电流。
5)图传单元
5-1)模拟图传:由模拟输出摄像头、飞控字符叠加、模拟图传发射机、天线、模拟图像接收机与显示器(或飞行眼镜)组成。FPV佩戴式飞行眼镜,整合了图像接收与显示单元。飞机发射端需使用全向天线,接收端可搭配定向天线增强信号。
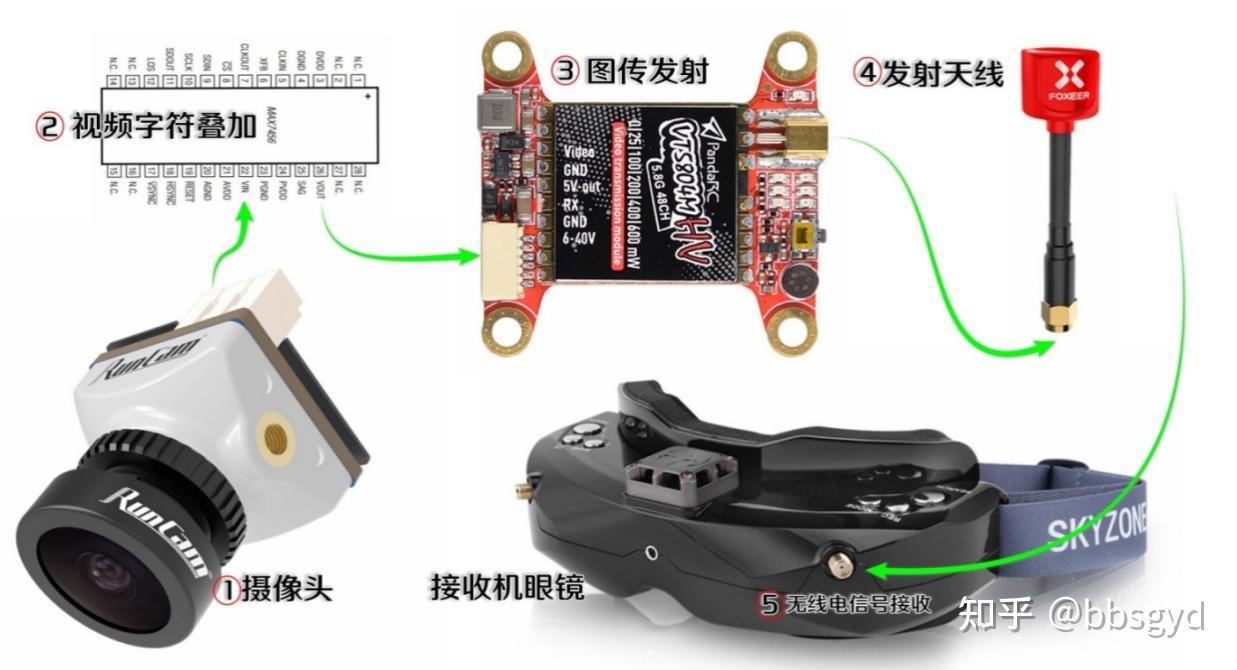
穿越机图传方案应用示意
OSD信息通过飞控板载芯片叠加于视频信号上,接收端只需接收一个复合AV信号;实际端到端延迟受设备性能影响,介于17~35 ms之间,这是正常延迟范围。
5-2)数字图传(HD VTX):
在FPV图传系统发展的最初阶段,穿越机FPV飞行几乎都是使用模拟图传收发单元。模拟图传系统的收发时延很小,相比之下,数字图传因需要压缩图像,在压缩编码和接收解码时会造成较大的处理延时,且系统复杂造价昂贵,很多人舍不得买。
随着电子技术推陈出新,软件技术迭代发展,数字图传系统的技术解决方案日趋完善,收发延时也降到了30~50ms以内。随着数字图传系统价格逐步降低,未来,穿越机FPV将会进入全新的数字图传时代。

DJI数字图传方案的应用
通过UART串口(MSP+Displayport协议)实现OSD信息传输,具备高分辨率、高刷新率与更远信号距离,并最终由FPV眼镜进行解码渲染来实现终端应用。飞控电路中无需使用OSD文字叠加芯片,降低了飞控成本。数字图传能带来更高的显示分辨率、使图传画面更清晰。以及更高的显示刷新率(90FPS~120FPS,而模拟图传仅为每秒50~60隔行扫描场),使用新的无线电编码技术也使信号能够传播得更远。
大疆O3-O4图传:实现1080p 100fps画面,延迟约35ms,图像清晰传输距离远。2022年中国深圳大疆创新的O3数字图传眼镜和天空端,已经在穿越机上大量使用。


1080p 100fps HEVC格式的图传画面显示效果非常清晰,画面延迟也只有35ms左右,很多穿越机飞手感慨说,用了数字图传就回不去了,不太愿意再使用模拟图传。
HD Zero图传:延迟可低至17ms,适用于竞速场景,最早用于穿越机的图传。2023年,美国Divimath公司发布了HD Zero低延迟数字图像系统,使用JSCC信号调制解调技术,画面延迟更能降低至15ms(540p 90fps),其延迟表现超越了几乎所有模拟图传系统,深受高端竞速飞手喜爱(每个HD Zero飞手的延迟都控制在13~15ms之间,更加公平)。中国DRA冠军以及世界冠军都在用,但是HDZero绕射性能和射频效率非常差,不推荐用于复杂环境下的飞行,如Bando花飞中,断连后信号重连需要几秒甚至十几秒。
6) 其他外设
6-1)BB响与LED灯带
LED与BB响蜂鸣器是飞控的常用外设,LED灯带可进行编程,可设置不同的闪烁也可显示不同的颜色,在比赛中可作为飞机身份标识。作为飞控状态提示装置,通过音频与光效提示系统状态(如解锁、低压、找机)。
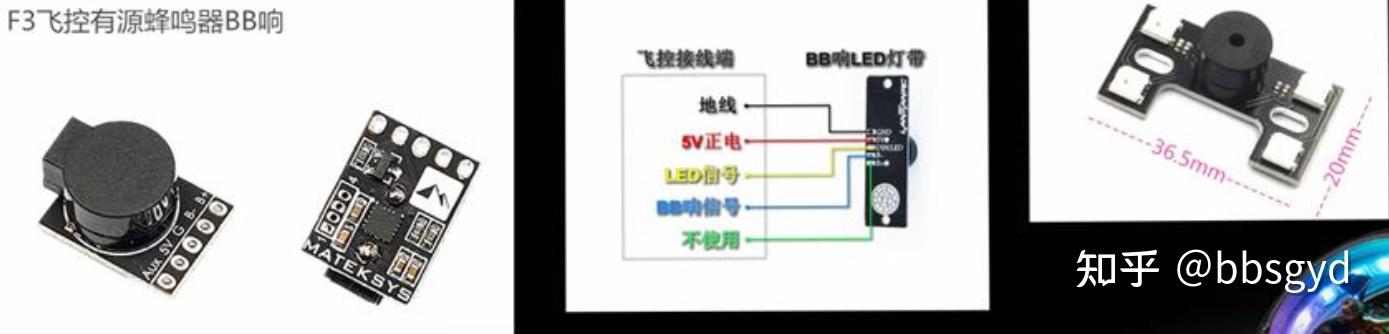
这个功能器件需连接5V正电源、GND地线及对应控制信号线,通过遥控器触发控制。部分BB响配备有电池,在主电源脱落后仍可发出寻机信号,例如静止2分钟后,每间隔10秒鸣响一次。
6-2)GPS接收机
给飞控添加一个GPS全球定位接收机,通过接收卫星信号记录返航点,远航穿越失控时飞机能自动返回起飞点附近几十米的空域,飞手看到飞近的飞机后,通过触发遥控器中断返航逻辑控制,获取飞机的控制权并降落。通常使用在FPV花飞类穿越机上,竞速类穿越机无需使用。BF固件的GPS返航为跳跃式进近,临近后需飞手接管。
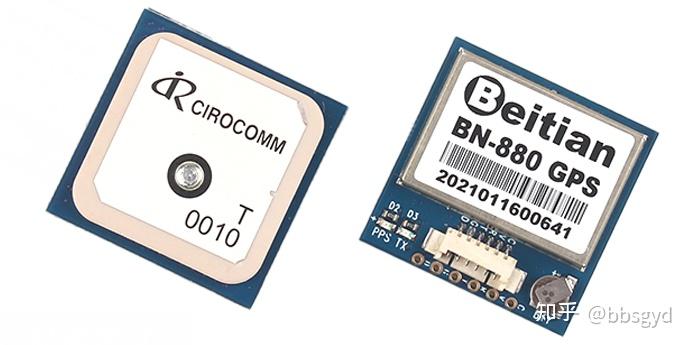
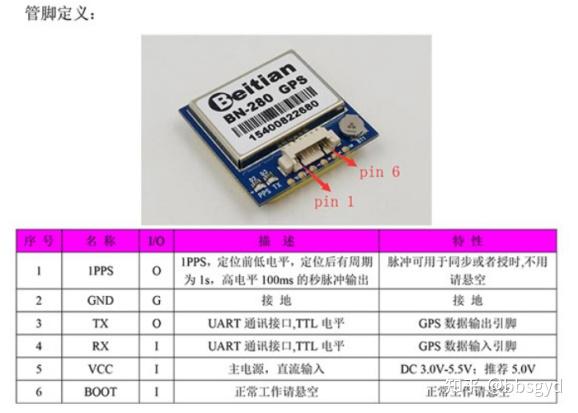
使用GPS接收机,需要用线缆连接飞控的外设端口,并对端口数据进行设置,只有正确地设置了对应型号接收机的匹配参数,才能建立飞控与GPS接收机的有效通信。高端的GPS还搭载了磁力计,使用I2C总线与飞控主控通信,需要额外连接SDA和SCL到飞控相应的焊盘(如有),配合Betaflight 4.5以上版本可实现更精准的自动返航与降落,但这有别于航拍类飞机的自动返航,需要飞手监视随时接管飞机。
6-3)调参电脑
需配备Windows7及以上操作系统的电脑,安装飞控对应驱动与调参软件(如Betaflight Configurator),达到双核心CPU的硬件配置基本可满足使用。
6-4)外场飞行电包
20-100Ah电池组,为充电器供电,输出电压11-25V均可。

第6节 系统学习与规划建议
1)穿越机新手入门指南(从理论到实飞的路径)
对于萌新而言,穿越机是一项富有挑战的技术型运动。选择正确的入门路径,能让你安全、高效地获得飞行乐趣与成就感。以下是一条经过验证的理性成长路径。
第1步:理论先行,筑牢基础,在接触真机前,系统学习飞行原理与安全规范至关重要。建议通过专业论坛、视频教程或官方手册,了解无线电、图传、电池安全等基础知识,建立安全飞行的首要意识。
第2步:模拟练习,零成本磨砺手感,投资一款兼容的遥控器,在电脑上使用 DRL、Liftoff 等主流模拟器进行练习。这是零风险掌握油门控制、姿态判断和基本航线的最佳方式,能极大减少真机阶段的“炸机”损失。
第3步:谨慎首飞,选择安全场地,首次实飞务必选择开阔、无人的场地,如空旷草坪。这既能避免干扰与事故,松软地面也能有效缓冲跌落,保护飞机。请切记穿越机无法像航拍机那样自动悬停,完全依赖飞手手动持续操控。
第4步:渐进升级,从飞行到精通,建议从 “到手飞”套机(BNF) 开始,免去初期复杂的装机调参。在熟练飞行后,再逐步挑战自行维修、组装与调参,深度参与飞机的优化过程,获得更完整的乐趣。
核心原则:穿越机的核心乐趣在于持续的飞行、学习与调试。理性规划,分步实施,才能在这项技术密集型运动中收获持久的成就感。
2)系统整合与方案规划
2-1)除了使用本穿越机理论资料外,萌新在真机飞行前建议先飞模拟器操控,在电脑上用遥控器连接穿越机模拟器进行练习,能极大节省成本和减少风险,推荐软件如Liftoff、DRL、凤凰模拟器等。
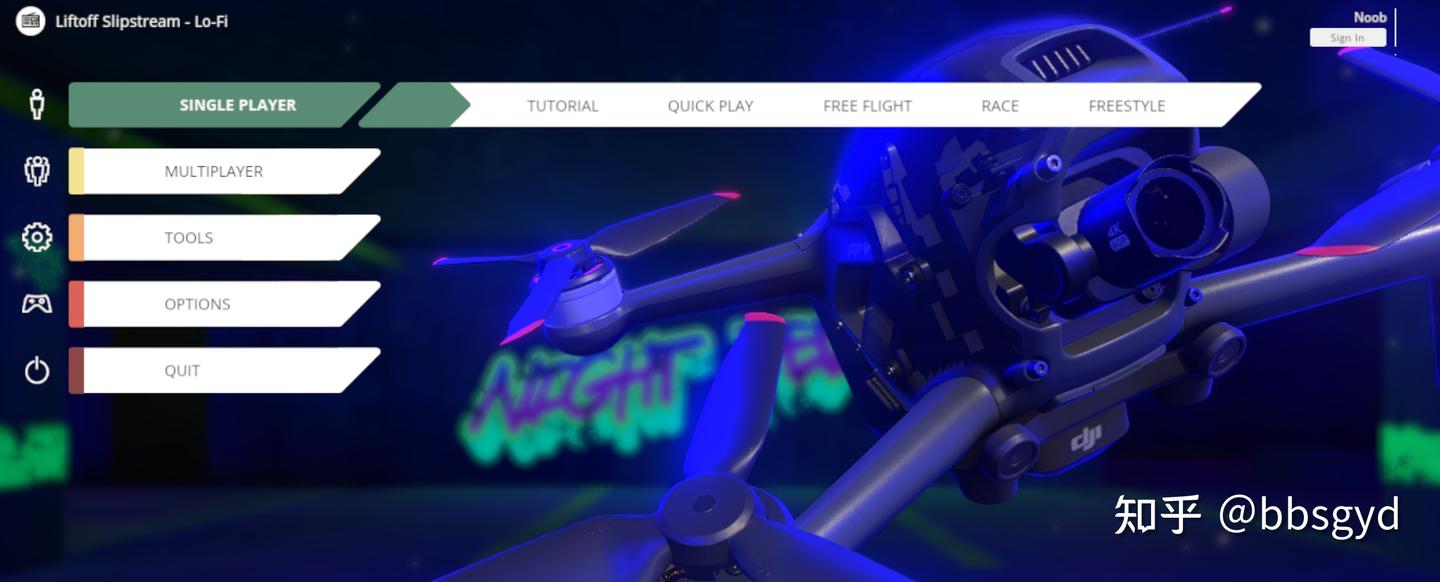
Liftoff穿越机飞行模拟器
拿到真机后,练习步骤可从悬停到航线分步走。于开阔无人场地练习目视第三视角下稳定悬停、缓慢前后左右移动,再逐步尝试FPV下的简单航线。
利用穿越机社区资源,多去浏览专业的航模论坛(如5iMX)、视频平台,学习他人的飞行操作、调参和维修经验。
2-2)萌新应从“到手飞”整机入门,避免初期组装困难挫伤热情。建议选择成熟方案,逐步提升动手能力。可依照先飞行、再维修、后组装、最终掌握调参技能的先后顺序规划学习路径。
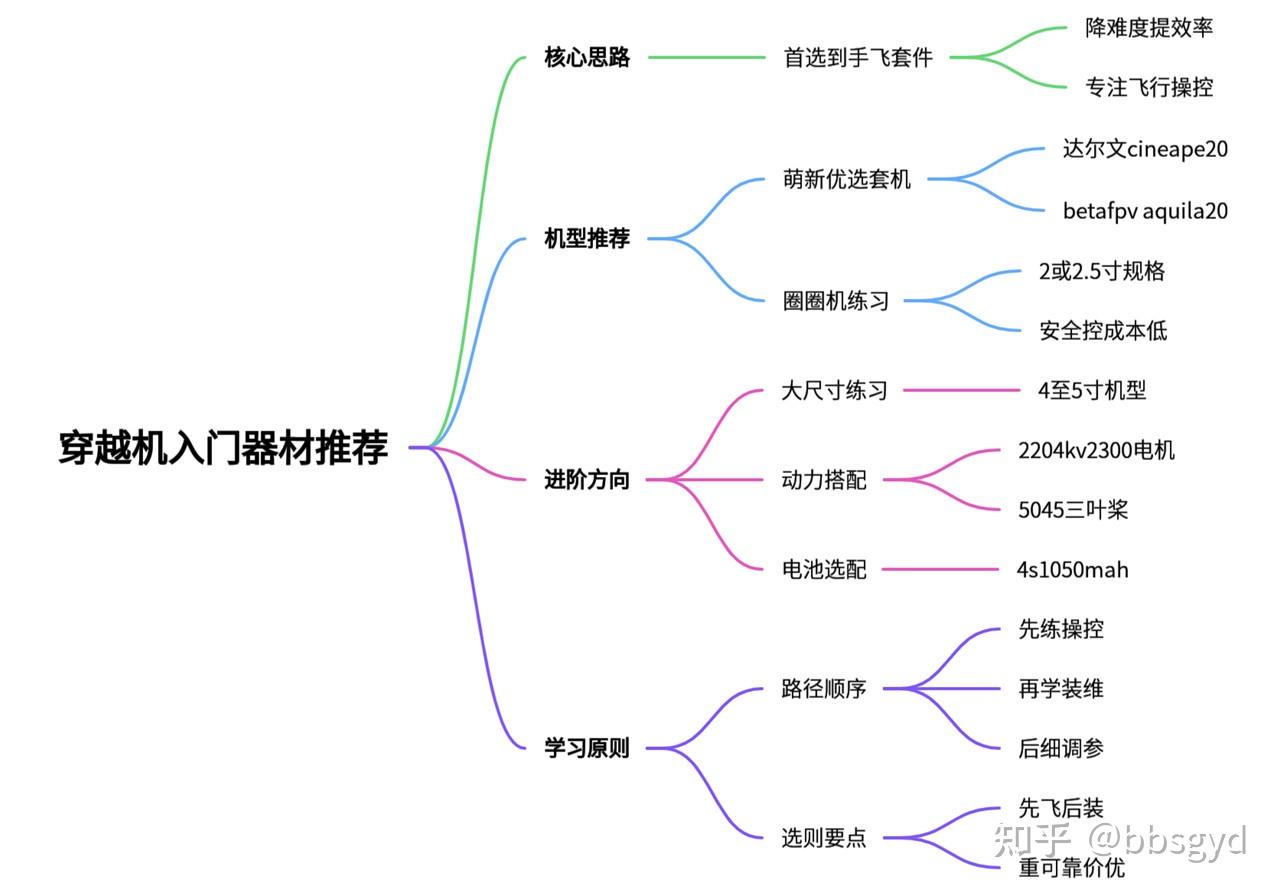
2-3)在操控技能达到娴熟状态后,可考虑使用4-5寸常规穿越机在开阔地进行练习,但要做好个人安全防护,并禁止在有人的场所飞行。并且建议练习飞机的动力电机为非暴力型号,可选择2204KV2300电机搭配5045三叶桨,电池使用4S1050mAh。

飞行操控进阶的到手飞套件案例
3)提升阶段硬件方案
“炸25”钛合金版:一款2.5寸圈圈机,特点是钛合金支架非常坚固耐摔,圈圈损坏后可单独低成本更换。提供从模拟到高清数字图传的多种版本选择,售后服务较为成熟。
银燕Freestyle 2:一款2.5寸花飞机,主打轻盈(整机约57克)和接近5寸机的操控感,出厂已调校为到手飞状态,适合从室内机过渡到室外花式飞行的练习。
LDARC ET85:一款2寸圈圈机,特点是性价比高,机架套件包含多种颜色和配件。适合在公园、小区等场地飞行,玩法多样(可支持2S-4S不同动力)。
如果你的进步比较快,且具备动手条件,可以开始尝试自己组装一台穿越机。以下是一个典型的组装方案,以五寸为例,在考虑性价比的前提下,尽可能满足提升阶段的飞行任务所用。
遥控器:Jumper T-14,选择ELRS 2.4Ghz版本,接收机选择更多。
接收机:ELRS接收机或者CRSF Nano RX接收机。
充电器:建议配置如M6D、D6Pro、M7航模专用的平衡充电器,选择主流才是硬道理,充电器是一个长期使用的器件,在以后的使用中需要稳定、耐用。
电源适配器:服务器拆机电源12V 38A,改装输出端子接入XT60插头。
电池:欧牌 6S 1350 150C;其它如花牌Infinity、格式RLINE。
电池箱:铁皮箱,体积自定,万一电池意外起火会更安全。
机架:marksT 5寸碳纤维机架套件。
飞控与电调:曼巴飞塔。
电机:2306 1750kv电机,动力更柔和,性价比高。
螺旋桨:HQ J37,桨叶一定要用好的,易耗品。
图传:Rush模拟图传,或者DJI O3、O4,HD Zero不推荐新手使用。
摄像头:模拟摄像头推荐FOXEER弹弓5,1000线,镜头好,宽容度好,稳定;或者RunCam Pheonix延迟低性价比高。高清数字图传推荐原厂摄像头;HD Zero推荐使用Nano90摄像头,HD Zero图传只能搭配HD Zero Googles。
天线:Rush Chery棒棒糖天线,或者FOXEER,注意图传天线的接口需要和图传配套:SMA 内针天线对应SMA内孔图传,ipex对ipex,MMCX对MMCX。
眼镜:BeeRotor FPV或者肥鲨HD,显示和接收效果差距不大。模拟图传可以对任意模拟眼镜。数字图传只能对应同一品牌的特定眼镜。
扎带:格普电池扎带20 X 250mm,选质量好的备几条,凯夫拉材质为最优,耐炸。
接着就是找一个靠谱的商家(航模钻石卖家、好评如潮那种店铺),对比后购买,也可让商家帮做好装调工作,整套装备到手飞。不建议购买5寸带保护框的机架系列,飞机太重了,不好飞。
现在,你需要做的就是敲定方案,付款,等快递送货到家。设置并测试飞机,最后再到室外找无人的开阔地去飞。
建议多一些时间学习穿越机相关的知识和别人总结的经验,炸坏了自己学着修,修着修着自己就学会了组装,再学会自己调参,这是最好也是最省钱的玩机路径,穿越机有一半的乐趣就来自于这个折腾的过程。
第二章 多旋翼穿越机飞行操控基础
第1节 了解穿越机遥控器
1)遥控器面板与开关定义
遥控器面板上方的拨动开关(纽子开关)被定义为AUX辅助通道,用于触发特定功能。典型配置包括将一个两档开关定义为电机解锁/锁定;将一个三档开关定义为飞行模式切换,可在自稳 (Stabilize)、半自稳 (Horizon) 与全手动 (Acro) 模式间进行选择。
2)摇杆操控模式与通道映射
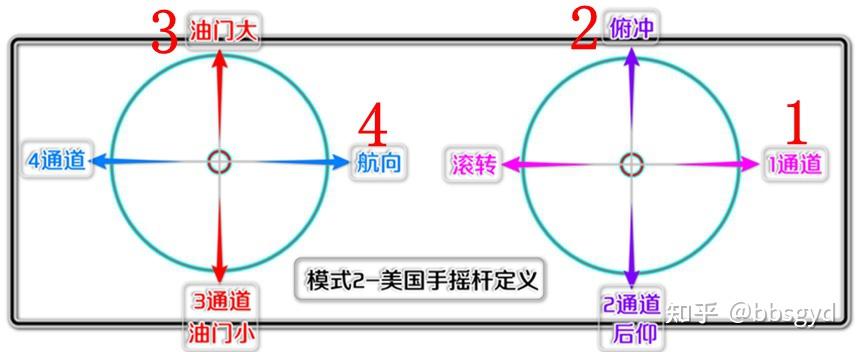
美国手模式(Mode 2)
左摇杆(垂直):油门 (Throttle) – 控制升力大小
左摇杆(水平):航向 (Yaw/Rudder) – 控制机身左右转向
右摇杆(垂直):俯仰 (Pitch) – 控制飞机前后俯仰,影响前后位移
右摇杆(水平):横滚 (Roll) – 控制飞机左右倾斜,影响左右位移

OpenTX TX18S开源遥控器与富斯FS-i6X十通道遥控器
在飞控调参软件中,美国手的通道映射为 AETR1234,分别对应:
1通道对应Aileron (横滚)
2通道对应Elevator (俯仰)
3通道对应Throttle (油门)
4通道对应Rudder (航向)
日本手模式(Mode 1)
日本手模式下摇杆定义与美国手不同,其通道映射为 TAER1234,即油门与俯仰通道互换。修改摇杆模式是为了适应个人操控习惯,但新手不建议随意更改,极易因操作混淆导致炸机。
3)摇杆回中特性与飞行模式影响
油门通道 (Throttle):不具备回中功能,需手动维持位置。
俯仰、横滚、航向通道:松手后自动回中。
不同飞行模式下,摇杆回中的飞机响应不同。自稳模式时1 2通道摇杆回中后,飞机自动恢复水平姿态。全手动模式时1 2通道摇杆回中后,飞机会维持当前姿态继续飞行,不会自动恢复水平。
4)穿越机与航拍机的操控差异
尽管美国手、日本手的通道定义在穿越机与航拍机中一致,但穿越机的油门不具备回中功能,且飞行特性更为灵敏直接。因此,即便是经验丰富的航拍飞手,也需经过系统练习,才能适应穿越机的操控逻辑,不可掉以轻心。
5)各通道详细功能解析
右摇杆 – 通道1 (Aileron/横滚),水平左右拨动。
控制飞机左右倾斜,摇杆回中后,自稳模式下飞机自动恢复水平;全手动模式下可用于执行连续滚转动作。
右摇杆 – 通道2 (Pitch/俯仰),垂直上下拨动。
控制飞机前后俯仰,自稳模式下用于控制前后位移;全手动模式下用于前飞或前后翻滚。
左摇杆 – 通道3 (Throttle/油门),垂直上下拨动。
持续微调以维持高度,是初学者最难掌握的摇杆通道。常见问题是推拉油门时带动航向通道杆量偏移,导致机身旋转,机头角度偏移,需通过练习形成肌肉记忆。
左摇杆 – 通道4 (Yaw/航向),水平左右拨动。
控制机身左右转向,调整机头朝向角度,建议初学者始终保持机头朝向与前进方向一致,熟练后再尝试复杂的方向变换。初期的目视悬停或位移时,需要随时关注机头朝向,微调航向使机尾始终朝向飞手,避免操控逻辑错误导致失控。
6)AUX开关设置与安全提示
三档开关:建议设置为飞行模式切换,新手应将最外侧档位设为自稳模式,避免在初期练习中误触半自稳或全手动模式导致失控。
两档开关:建议设置为电机锁定/解锁,解锁后方可推动油门启动电机,失控时能快速切换档位停止电机转动。
7)安全警告:
所有AUX功能均需先在遥控器上分配通道,再于飞控软件中设置对应功能。
电机解锁后应即刻起飞,避免地面误操作;降落完成时应第一时间锁定电机。
第2节 穿越机遥控器摇杆练习
1)基础打杆练习
新手对遥控器摇杆操控往往十分陌生,正式飞行前需投入时间熟悉。打杆是用左右拇指尖轻触按压摇杆,沿直线轨迹进行推拉的动作。初学者常难以保持轨迹笔直,易产生杆量偏移。例如,上下推拉油门摇杆时,易误触左右航向通道,导致机头方向意外改变,增加操控难度。
握持遥控器是有标准要求的,通常在遥控器上安装一条挂绳,将挂绳系在脖颈上。双手夹持遥控器两侧,手掌向内,以小指根部为限与遥控器面板对齐,手掌与遥控器面板呈90度垂直,遥控器面板向后倾斜45°左右,小臂与身体呈约90°角,大臂与身体基本平行,大臂与小臂呈90~100度夹角。
练习要点:体会摇杆阻尼与行程,专注于单一通道的直线操控;运用多指关节协同发力,避免仅靠拇指局部动作;避免手型畸变,多数情况下手掌会靠在遥控器两侧,导致手指运动受阻;练习时佩戴安全绳,防止遥控器意外跌落。
2)油门、姿态控制精要
油门操控是穿越机飞行的核心技能,需贯穿整个学习过程。
微量快调:油门调整需快速、小幅,避免大幅度推拉导致飞机急速升空或坠地;
持续修正:保持油门持续微调,克服紧张情绪导致的操控僵化;
手感积累:油门响应与力度控制需通过实践积累“手感”,难以言传。
提前量:加减速和姿态变化都需要在运动中随时调整,并预测提前量,克服大脑指令与手部动作时延。
3)心理建设与趋势预判
心理适应:飞行失控是常态,需通过反复练习增强心理承受能力,逐步达到“炸机不惊”、“失控不慌”的平和心态;
趋势预判:培养对飞行轨迹与动作趋势的预判能力,把握油门和姿态调整的提前量,预测合理提前量以配合当前运动速度,将飞行轨迹控制在预期范围内。
第3节 穿越机目视操控基础
1)设备准备与检查
器材选择:建议新手选用参数已调试完毕的“到手飞”整机。
场地要求:选择郊区开阔、人迹罕至的场地。
起飞前检查:确认飞行模式处于自稳模式(ANGLE MODE);检查桨叶安装牢固,遥控器开机后再连接飞机电池;水平静置飞机3–5秒,完成飞控自检。
2)基础解锁测试与安全习惯训练
初级解锁与锁闭练习(1~2块电池循环):
将飞机置于前方10米处,机头向前、机尾朝向自己。
练习电机解锁/锁定操作十几次,形成肌肉记忆,失控时不至于手忙脚乱。
重要安全原则-任何失控情况下,第一反应应是锁定电机。
入门的目视练习中,始终调整机尾对着自己。
3)基础油门、航向操控训练
初级起降练习(10~30块电池循环):
缓慢推油门使飞机升至20~30厘米高度,随即缓收油降落。
重点体会地面涡流效应悬停练习,形成对油门与悬停力量的初步“手感”。
克服油门与航向通道的误触,最终能始终保持机尾朝向自己。
航向操作练习时,确保飞行高度基本恒定,在旋转航向,顺时针或逆时针旋转90°、180°、360°,应同时克服飞机串高或者快速跌落底面。
4)基础地效悬浮位移与方向控制训练
初级低空悬停与航向、姿态控制练习(10~20块电池循环)
飞机悬停高度约20cm,以飞手为圆心,操控飞机进行低速圆周运动,每移动几十厘米即触地一次,可有效缓解心理压力,切不可飞高飞远导致心慌失控。这个项目主要练习油门感知、起降力量控制、航向变化和位置移动,利用底面下洗气流形成的低空悬浮稳定性,完成航向与位置控制。
在移动中通过航向通道微调机身旋转,保持机尾始终朝向自己。
让飞机不断触地,如果飞控开启了AIR MODE选项,会反弹振动,很容易翻机,需要将该选项关闭。
5)基础悬停与位移控制训练
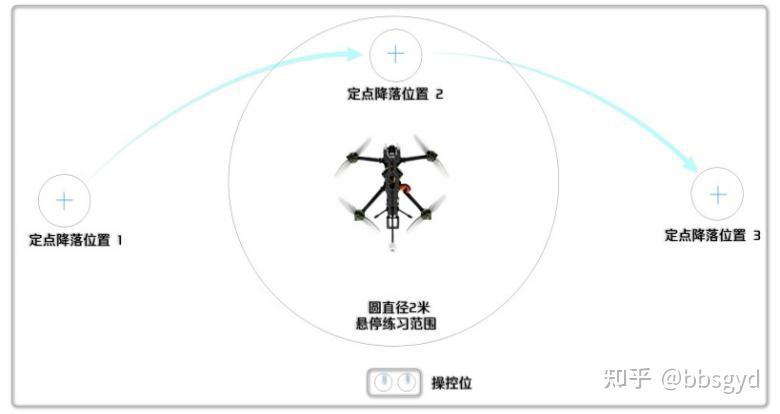
初级悬停与位置移动练习(需留空数小时至数十小时)
目标:将飞机控制在50厘米高度,直径2米的圆圈内,悬停时间大于30每秒;
方法:配合右摇杆的俯仰与横滚进行微调,杆量需轻柔、持续,避免快速一拨一回,手指不可离开摇杆;
原则:熟练后谨记不高、不远、不快,高度不超过3米,悬停半径不超过1米。
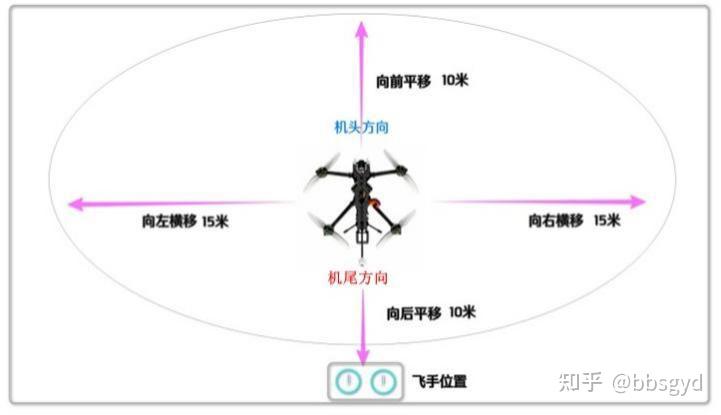
位移控制(需留空5~10小时)
练习前、后、左、右四个方向的平移,飞行高度2米左右,最终实现飞行高度误差<1米;定点停止位置误差<0.5米,飞行中机尾始终对着自己。
6)进阶方向训练
高级航向与姿态控制练习(50~100块电池循环)
机头转向90°:训练在任意机头方向时,正确操控飞机运动方位,熟悉机头方位变换与姿态控制逻辑关系,纠正错误打杆逻辑,不断缩短手脑反应延迟;
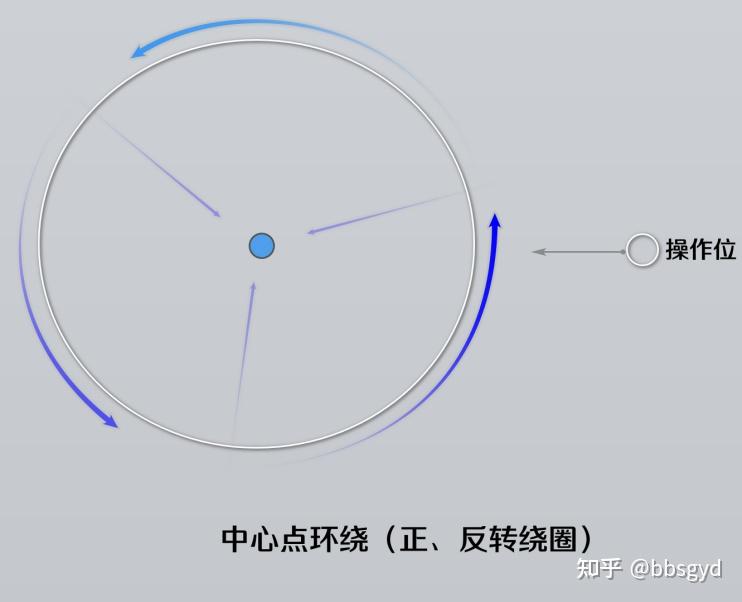
中心点环绕与航线练习:以机头向前进行圆圈、方形、8字航线等练习,此阶段耗时较长,但对培养飞行手感至关重要,可在入门后的任何阶段进行练习,累积经验。
7)进阶多模式操控训练
高级综合控制练习(数百块电池循环)
半自稳模式(HORIZON MODE)
特点:动作响应加快,大角度倾斜可能导致快速冲地;
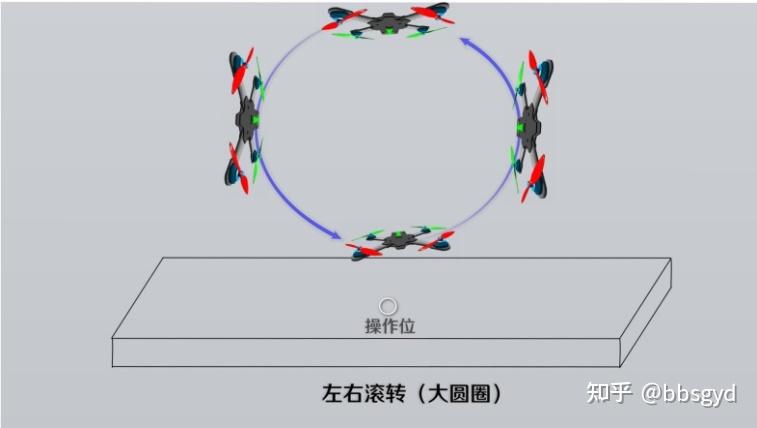
翻滚练习需要提升悬停高度只10米左右,快速加油30% 获得升力并收油门至悬停杆量,大幅度打左或右滚转摇杆触发横滚动作;飞机姿态接近水平时快速补油,并将摇杆快速回中,飞机会自动稳定姿态。
全手动模式(ACRO MODE)
在自稳与半自稳模式熟练后切入,练习顺序为悬停 → 位移 → 翻滚 → 8字航线飞行。全手动模式也称为按比例角度模式,任何姿态的倾斜,回正都需要反向打杆修正,通常不能使用大幅度打杆动作,需要将一个动作的修正预期,分为2~3次小杆量进行叠加,以免来回大杆量操作导致翻覆。在目视第三人称视角下练习全手动操控,是花飞动作的基础,也是为FPV飞行做准备,在FPV飞行中,无论竞速或花飞都是在姿态模式下进行的。
部分FPV飞手没有经历过目视操控的飞行练习,直接进入FPV下进行飞行,这样也没有什么问题,目视操控并非必须选项,但如果涉及目视应用,就无法掌控了。
目视基础操控基础阶段练习完成,可进入FPV飞行阶段。
8)学习建议与心态调整
目视操控是FPV飞行的基础,扎实的基本功将使后续学习事半功倍;
炸机是进步的阶梯,绝大多数飞手都经历过几百数千次坠机;
操作中会导致心理紧张,可适度对心理压力进行循环耐受训练。
建议多观摩网络视频教程,并配合模拟器进行辅助练习。
第4节 穿越机FPV(第一视角飞行)操控基础
1)FPV起降
前提是您已熟练掌握目视起降,并能精准控制飞机的起降动作。将遥控器飞行模式切换至自稳模式,准备就绪后,戴上FPV眼镜,解锁电机并轻推油门起飞。飞机可低速向前飞行一段距离后降落。起飞时,注意观察视频画面的动态变化,熟悉参考物体的位置移动,以感知飞机的实际位置与飞行速度。降落时,逐步降低飞行速度,待飞机停止前移,适当收小油门使飞机逐渐接近地面。在离地约10厘米时,锁定电机,让飞机掉落地面。注意飞行速度控制,降落时需要果断停桨,不能进行悬停等待。
2)FPV向左、右转向
将飞行模式设为自稳模式,准备就绪后,戴上FPV眼镜,解锁起飞并以一定速度向前飞行。向左转向时,缓慢向左拨动航向摇杆,使机头逐渐左转,同时保持右摇杆的俯仰杆量不变,并适当向左施加横滚杆量,以维持较小的转弯半径并避免飞机过度右偏。向右转向时,同样保持俯仰杆量不变,向右施加横滚杆量,以实现紧凑的转弯轨迹。在机头方向快速变化时,需适当增加油门,以保持飞行高度。
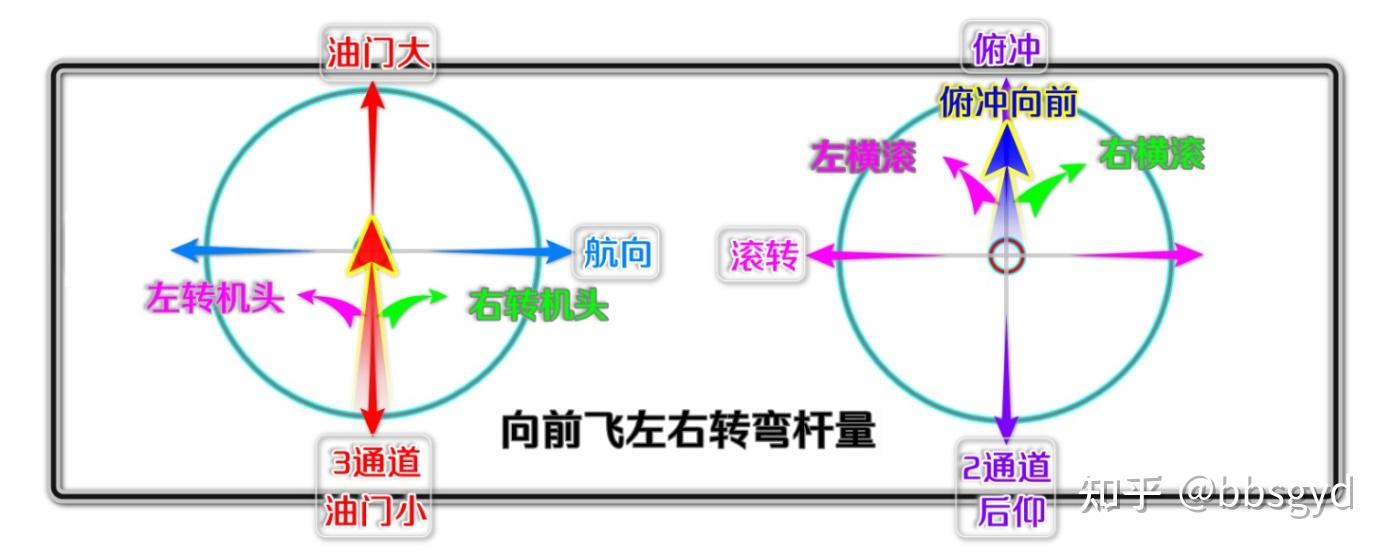
在自稳模式下直线飞行过程中进行转向时,若仅拨动航向摇杆而保持机头前倾角不变,飞机会因离心力产生明显偏移,导致转弯半径过大。正确操作是配合使用横滚杆量,锁定转弯半径,使飞机沿机头方向平稳转弯。通过协调油门控制,可进一步缩小转弯半径。此技巧需反复练习才能熟练掌握,初学阶段可能出现反应迟缓、方位感模糊及手脑不协调等情况,建议在草地上进行低空转向练习。
3)FPV绕圈与掉头
绕圈飞行建立在俯冲转向的基础上。若想飞出同心圆轨迹却出现半径逐渐扩大的情况,需通过右摇杆的横滚杆量配合,抵消惯性离心力影响,锁定绕圈半径。掉头是指机头快速完成180°转向。操作时,可适当收小油门,避免因离心力导致转弯半径过大,同时快速拨动航向摇杆改变机头方向,并辅以适量横滚杆量,以减小漂移,实现快速掉头。基本完成转向时,迅速恢复油门,保持高度并回飞。
绕圈实为掉头动作的慢速版本,掉头时机头转向迅速,而绕圈时机头转向缓慢,需配合适当的横滚与俯仰杆量,使飞机沿较大半径圆弧飞行。难点在于机头转向角度、俯仰力度与横滚杆量之间的协调,这需要大量练习。经过数十甚至上百次电池循环的训练,方能随心所欲地完成各种绕圈动作。掉头与绕圈是穿越机飞行中的常用动作,务必勤加练习。
4)FPV中心点环绕
中心点环绕,俗称“刷锅”,是指飞机在横向移动过程中,始终保持机头指向目标物体,并沿固定半径做圆周运动。通过调节航向偏移量,可控制机头转向速度,转向越快,绕圈半径越小。飞行中需向运动方向施加横滚杆量,以控制飞行速度。同时,为抵抗惯性离心力导致的半径扩大,还需加入适量俯仰杆量,以锁定飞行半径。
在该动作中,飞机进行横向移动,操控者无法直接观察机头两侧的障碍物,因此需提前勘察环绕路径,确保飞行空间充足,避免发生碰撞事故。
5)FPV翻滚
初学滚转和翻滚时,务必让飞机高度超过10米再进行,并先在半自稳模式下练习。翻滚动作可用于增强视觉效果,或以特殊姿态穿越障碍,常涉及前翻、后翻等操作。建议先熟练掌握前翻与后翻,再尝试左右横滚。滚转滚过程中,可迅速提升油门(增加高度)并随即收回至一半位置(滚转不失控),同时将右摇杆向目标方向打满并保持。通过观察飞机姿态变化,判断飞机即将完成360°翻转,迅速回中右摇杆,使飞机快速恢复水平姿态,并通过油门调节维持高度,确保飞行安全。
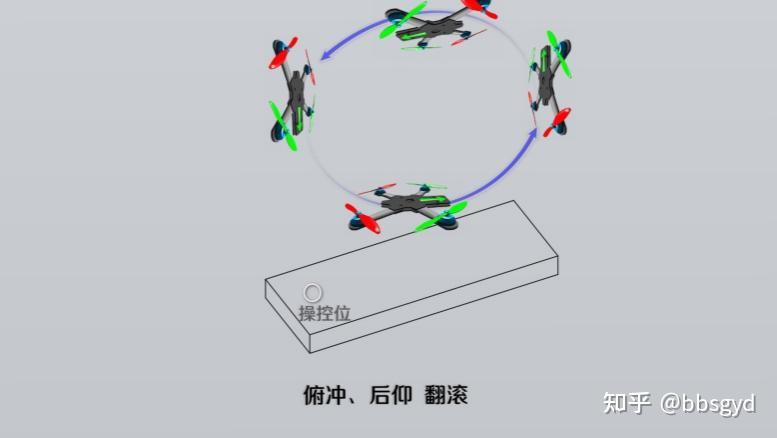
左右滚转与俯仰翻滚
练习翻滚时,需深入体会油门操控,不同飞行姿态下,油门的杆量及变化速度均不相同。进行更多练习,实现油门的精准配合。
第三章 多旋翼穿越机组装技术基础
第1节 组装穿越机的准备工作
1)烙铁锡焊工具
性能优良的电烙铁是顺利完成焊接工作的基本保障。推荐选用低压调温电烙铁或焊台,例如T12焊台或白光款936电烙铁,均适用于飞控板电路与导线的焊接。焊头建议选择中等圆锥形、马蹄形、刀型或粗尖头等不同形状,以适应各类焊接面的需求。
建议使用T12焊台控制器与936焊台整套到手即用。
避免使用220V电热丝类烙铁,或无调温功能的烙铁焊接飞控板,其静电或高压漏电,可能击穿耐压值仅几伏的集成芯片,无温度调节功能的焊接头可能导致焊盘烧毁。工作台上应铺设防静电垫子,并养成焊接前释放人体和工具静电的习惯。
焊锡丝与松香也需选用优质产品,焊锡丝建议选用线径为0.8–1.0mm的整卷规格,内含松香助焊剂。熔化温度不宜过高,锡铅比例推荐为40/60或37/63,熔点约为185℃。烙铁架配合清洁海绵使用,经常擦拭焊头以保持清洁,使用前需将海绵润湿但不可浸泡。因焊锡含铅,属于重金属有害物质,操作时请注意佩戴指套。
若需外场维修焊接,可选用便携式T12烙铁,支持4~6S航模电池或USB供电。此类烙铁通常集成紧凑型控制电路,便于携带。
2)烙铁锡焊技巧
焊接飞控电路板与外设连接线时,熟练的焊接技巧是保证焊接质量的关键。新手应先进行焊接练习,可先使用废旧电视机电路板练习大元件焊接,再逐步过渡到小型电路板。焊接小焊盘时,建议用尖细镊子固定导线末端,并配合放大镜进行作业。
焊接练习应重点掌握以下内容,合适的烙铁头温度控制、导线剥皮与线头预上锡、松香等助焊剂的正确使用、电路焊盘识别与上锡、焊盘与导线的焊接技巧,以及放大镜检查焊点。焊接完成后还需核对线序的正确性。
在飞控板上焊接时,应设定适当温度并迅速完成焊接。温度过高或焊接时间过长可能烫坏焊盘或损坏元件。请勿使用含酸性物质的助焊剂,以免腐蚀电路与导线。
焊接电源类导线后,需用万用表测量正极对地电阻。若阻值为几欧姆,可能存在短路;正常情况应大于30欧姆或为无穷大。焊接有极性电解电容时,务必正确接入正负极,反向连接将导致电容损坏。
3)认识焊盘标识
飞控电路板上通常标有焊点功能标识,需正确识别焊盘上的英文与数字符号。
3-1)常见电路标识包括:
GND/G:接地,接电池负极
BAT/VBAT/B+/VCC:电池正极,接电池正极
BEC 3.3V/5V/12V:降压模块电压输出,部分输出有跳线选电压功能
PWM1~8/S1~S8/ESC1~8:电机控制信号,单路独立线路
VIN/Vout/CAM:模拟摄像头视频输入in/输出ou
PWM/PPM/SBUS/CRSF:接收机信号端口,PWM为单通道,其它为复合多通道
RSSI:接收信号强度回传,入后通过OSD字符显示接收信源强弱
LED:灯带控制,等待正极为5V,地线为GND,PWM控制线为S
B+/B-/BB-/ BUZ-:BB响正负极,通常有源蜂鸣器控制线为负极通断,接B-
TX2/RX2/T/R:串行通信收发端口,T为发送,R为接收,两端需交叉连接
3-2)注意事项:
飞控的GND接地均为共地,理论上外设可接任意接地焊盘。
外设供电需按标识接入对应电压正极焊盘,正负极接反可能烧毁设备。
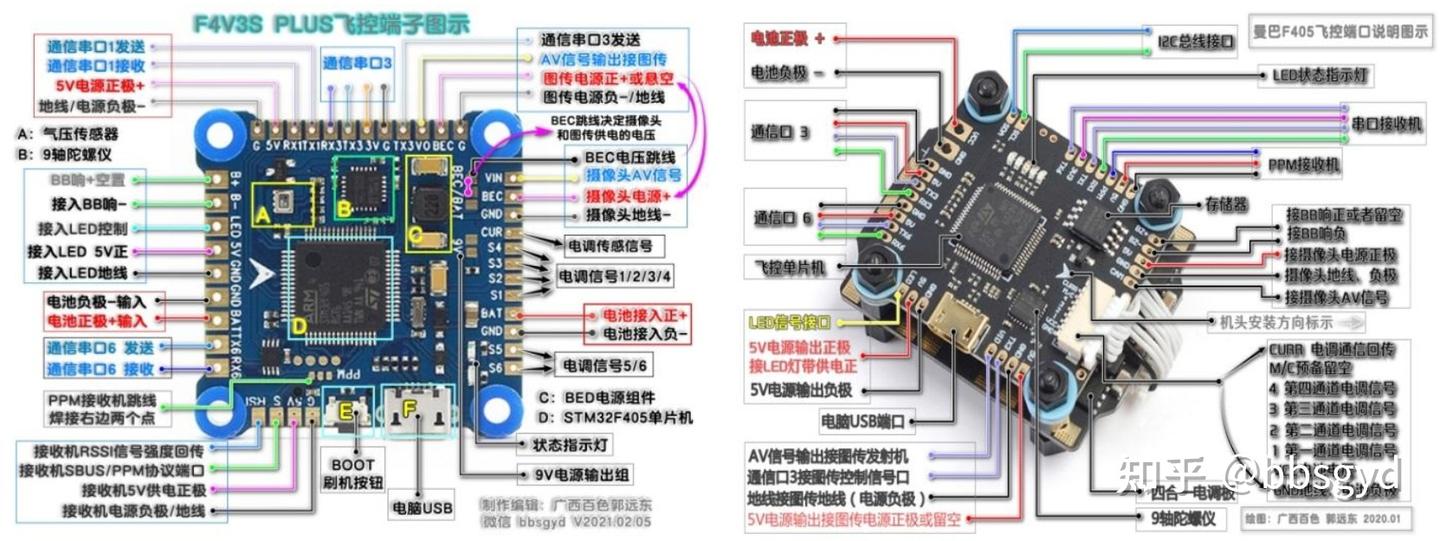
有源BB响控制端应接入BB- 或BUZ- 焊盘,BUZ+、BUZ-分别为BB响的5V正极与负极,部分只有BB-,正极接5V。
电池正极常见标识包括VCC、BVCC、BAT(B+/B-),可通过电调BAT排线或独立BAT焊盘接入。
PPM/SBUS用于接入对应电口协议的接收机信号,并在调参端口页面选对应协议。
TX/RX用于连接GPS、接收机、数传等外设,需交叉连接,外设TX接飞控RX,外设RX接飞控TX。
模拟摄像头接入飞控CAM或vin焊盘,模拟图传发射机Video接飞控VOUT焊盘。
SDA/SCL为I²C串行总线端口,常用于连接磁力计等外设,SDA收发,SCL时钟。
飞控焊盘标识对萌新而言较为晦涩,大部分萌新对这些标识往往感到陌生,但焊盘标识是组装过程中的关键知识点,需通过资料收集与笔记整理逐步学习。随着经验积累,将逐渐熟悉标识所表示的含义与应用连接。这类常用标识数量有限,建议通过抄写与背诵加深记忆,为后续组装筑实知识基础。若具萌新已备其他电路经验,学习电路标识的过程将大幅缩短。
4)万用表的使用基础
万用电表的使用是电子电路测量的基本技能,初学者只需要学会一些简单的测量技巧即可。
4-1)电压测量:学会使用电压V档测量DC直流电压,掌握测量电池总电压和、测量飞控板的3.3V/5V/9V/12V直流输出端子,判断电极的正负。电压的单位为V伏特,常用的单位有kV千伏特、mV毫伏、uV微伏。换算关系为uV微伏→mV毫伏→V伏→kV千伏,沿着这个顺序向右(向更大单位)转换时,数值除以1000;向左(向更小单位)转换时,数值乘以1000。
4-2)电阻测量:学会使用电阻档测量地线GND与正电焊盘的电阻值,判断正电焊盘的对地电阻值大小;学会使用蜂鸣档判断导线好坏,测量导线完好性、通断和电阻值。电阻的单位为Ω欧姆,常用单位有mΩ毫欧、千欧kΩ、兆欧MΩ、吉欧GΩ。记住这个核心顺序和换算关系mΩ毫欧→Ω欧姆→kΩ千欧→MΩ兆欧→GΩ吉欧,沿着这个顺序向右(向更大单位)转换时,数值除以1000;向左(向更小单位)转换时,数值乘以1000。在绝大多数日常电子制作和维修中,您只需要关心这三个单位Ω、kΩ和MΩ。
4-3)地线测量:学会使用二极管通断鸣响档,测量接地点和电容共地、测量GND所连接的同组地线,判断各种电路的GND标注点与地线搭铁的通断情况。通断测量的欧姆阻值越小,表示线路连接电阻越小,连接更牢靠,测量导线连通电阻在个位数值。
4-4)电流测量:非必须技能,电流测量可能需要更换表笔插座,并切换至交/直流电流档位,甚至需要接入有效负载,才能观察到电流数据,在穿越机组装中基本用不到。电流的单位是A安培,换算关系μA微安→ mA毫安→A安培→kA千安,沿着这个顺序向右(向更大单位)转换时,数值除以1000;向左(向更小单位)转换时,数值乘以1000。在大多数电子制作和维修中,只需要关心mA和A这两个单位。
4-5)电容测量:非必须技能,用于电容的有效容量测量。电解电容可在板测量,小容量的贴片电容通常需要离板测量。电容的单位为F法拉、uF微法、nF亨法。换算关系pF皮法→nF纳法→μF微法→F法拉,沿着这个顺序向右(向更大单位)转换时,数值除以1000;向左(向更小单位)转换时,数值乘以1000。
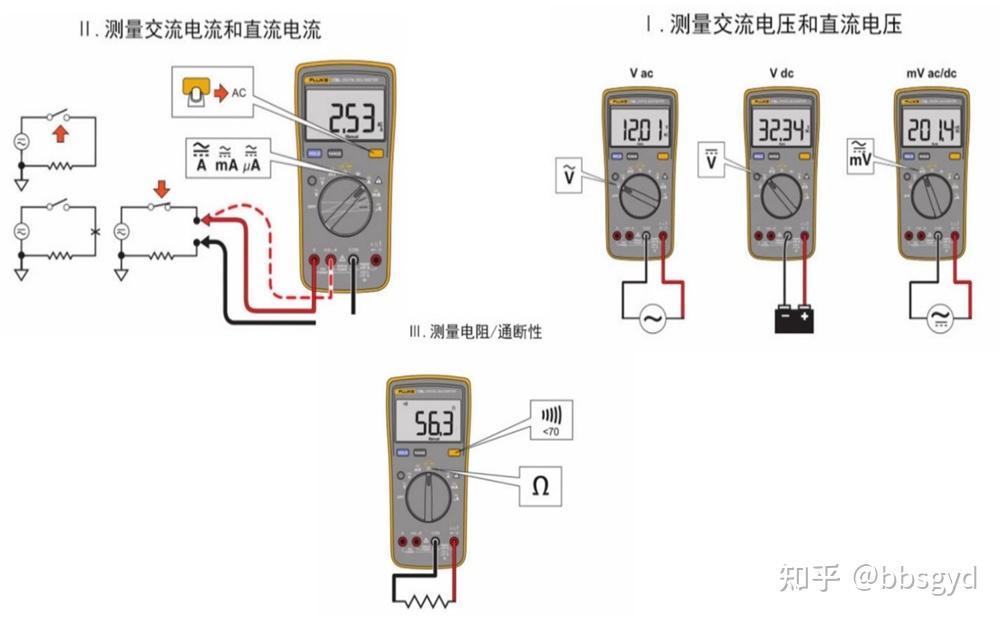
万用表建议使用大品牌的产品,质量可靠,性价比高,结实耐用。选购万用表时不要最求更多的测量种类和性能,只要具备交直流电压、电阻、二极管、蜂鸣通断档位就够用了,价格在50元至一百多元RMB的大品牌产品是首选。使用普通数字表或自动档位以及语音播报的万用表会更简单。
5)五金工具
5-1)必须工具组合:组装穿越机需要使用一些必须的工具,除了用到电烙铁外还需要一套内六角螺丝批、尖头镊子、尖嘴钳等。

常用到的工具还有手电钻、小台钻、打磨器、锉刀、打火机、剥线钳、剪刀、裁纸刀、可调试验电源。
在焊接飞控输入、输出焊盘的导线时,需要一个20倍左右的放大镜,用于观察焊点的焊接质量,避免发生虚焊和焊接粘连。在使用热缩套管防护导线时,还需要一个热风枪或打火机,用于快速将套管热缩。
实验电源的输出电压可调范围在3V~30V、输出电流在0.1A-5A(10A),就可以满足绝大部分情况下的各种测试工作。如果要深入些研究多旋翼飞行器,可以计划一些调试辅助器材,如电机拉力器、电流传感器、调试固定架、桨叶平衡架等。
如果可以自己具备CNC数控机、3D打印、铣床等机械加工设备,对于机架的定制及改装工作是非常有利的。
5-2)穿越机组装工具清单:
5-2-1)T12烙铁一套,可调温,含小刀头、小马蹄、粗尖发热体,
烙铁架、清理海绵、松香、1.0mm焊锡丝;
5-2-2)内六角螺丝批一套包含1.5/2.0/2.5/3.0mm头各一把,常用的是2.0mm;
5-2-3)斜口钳(SHELL贝印SM-18);
5-2-4)数字万用表(测通断、电压、电阻);
5-2-5)10倍放大镜,手持或者台式,焊接和检查线路用;
5-2-6)30V5A可调试验电源,测试维修用(可选);
5-2-7)打火机,普通,烧热缩套管用;
5-2-8)不锈钢镊子;
5-2-9)小十字批;
5-2-10)M8扳手,内六角,拆装桨叶螺母用;
5-2-11)充电器、电源适配器、遥控器、图传接收机眼镜(可选);
5-2-12)室内PID调试测试架(可选);
5-2-13)调参电脑一套,主机4核心8GB内存,Win10 64位系统;
5-2-14)USB数据线,质量好的,调参接飞控用;
5-2-15)飞行电池4S 1550mAh 120C或者6S 1300mAh 100C,测试用(可选);
5-2-16)TF卡4GB,部分飞控黑匣子用(可选);
5-2-18)游标卡尺,电子版0.1mm分辨率,金属或者塑料材质均可;
5-2-19)工作台灯,100Hz以上,亮度可调或者带放大镜一体(可选);
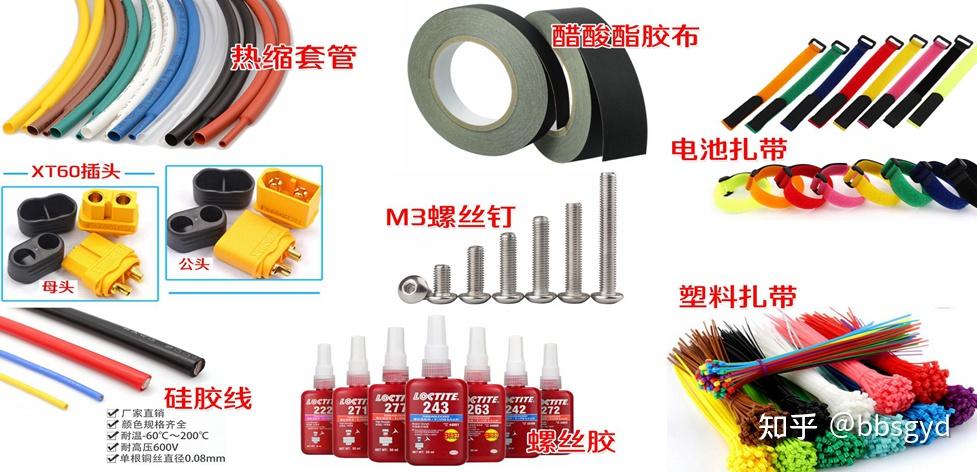
6)其它耗材
6-1)常用装机辅材:在组装穿越机的过程中,还需要准备一些常用的辅助装配材料,如XT60电池插头、醋酸酯胶布、242螺丝胶、防水漆、1~25mm热缩套管、M2/M2.5/M3直径3~35mm长度的螺钉诺干。

AWG12#、14#、16#、30#硅胶线诺干、1.5*10mm/2*15mm尼龙绑扎带、20*250MM优质的电池扎带诺干条。
在学习组装和维修穿越机的过程中,可以把常用的耗材和主要配件都备上一些,因为在购买飞机时,厂商并不会有足够的耗材配给,损坏后的维修工作往往比较麻烦。常用的电池插头、安装螺钉、硅胶导线、热缩套管、塑料扎带、电池扎带、醋酸酯胶布都必须有点库存,随时可以使用。
3D打印件在安装诸多设备时用途也很广泛,购买机架时,可以一并配套符合机架安装尺寸的打印件。
如果需要维修电路板,芯片维修拆焊还需要一台热风枪,检修电路板还需要用到示波器观察电路状态,当然,各种飞控和电调的资料、图纸、固件都是需要不断收集整理存放。这已经不单是学习穿越机飞行和装调的范畴了。
组装和维修穿越机是一个很专业的工作,需要不断总结经验,学习新技术应用技巧,提升自身的技能水平。每次组装或者维修完成后,要对飞机进行试飞,将参数调试到符合使用要求,试飞中如出现问题要及时记录并解决。
让一切为飞行而生,多去飞,提升飞行操控水平,助推装维技能进步。
6-2)穿越机装机常用耗材库:
6-2-1)热缩套管,1.5mm-2.0mm~3.0mm若干用于导线接续绝缘;
15~20mm用于遥控接收机保护,150~180mm用于4S~6S 1550mAh电池保护;
6-2-2)醋酸酯胶布10mm、15mm、20mm、40mm若干,10~15mm绑扎机臂上的导线;
6-2-3)硅胶导线20AWG若干,接续延长电机线用;
6-2-4)硅胶导线30AWG若干, 0.8mm信号专用,150mm长度,6色,维修用得多。
6-2-5)硅胶导线12AWG若干,电池输出,电调输入导线;
6-2-6)XT60公母头若干,电池、电调用;
6-2-7)MMCX转SMA馈线带座子,图传天线转接,长度100mm,常用MMCX弯头转SMA直头,视情况备用;
6-2-8)MMCX-J弯头天线5.8GHz,标准简易全向天线,图传发射机用(可选);
6-2-9)APEX4遥控接收机天线若干,2.4GHz,150mm(可选);
6-2-10)BB响LED二合一,超小型2-4元一个,备用20个(可选);
6-2-11)12.9级(N/M)螺钉,内六角圆头,M3直径,机架、电机常用螺钉,
使用最多4、6、8mm长度,10~15mm使用少,安装飞塔25、30、350mm;
6-2-12)尼龙螺母,M3直径,安装飞塔用,数量1000P;
6-2-13)M5防松螺母,铝合金,航模专用,正反螺纹都备用40个;
6-2-14)平衡充延长线,xh2.54,6S(可选),XT公转母充电延长线(可选);
6-2-15)机架铝柱各规格若干,常用的为M3直径,18、20、25、30mm(可选);
6-2-16)飞控、电调、图传、接收机备用若干(可选);
6-2-17) 螺丝胶,防止振动松脱(可选);
6-2-18) 塑料绑扎带,尼龙材质,黑白均可,2.0、2.5、3.0mm*100~150mm;
6-2-19) 电池绑带20*150~200~250mm,常用的220~260mm之间。
6-2-20) BB响测电器,检查电池电压,放电低压报警;
第2节 明确用途和硬件方案
不同的穿越机硬件方案,适合不同的飞行任务。例如花飞、竞速、航拍、远航探索、急速打击、快速侦查、智能跟随打击、反无人机等任务,所适用的飞机差异很大,不可能用一台穿越机就能适配所有任务。
1)飞行用途和机架方案
组装一台用于提升阶段组装、操控、调参练习的穿越机,动力适中、价格适中、性价比高,例如使用复刻Marks 5全碳机架,方案为穿越机花飞类型。
2)动力单元
电机:2306 kV2300
电调:50A四合一
螺旋桨:51499或5045 5英寸螺旋桨
电池:欧牌1350mAh 4S 100C电池
3)飞控单元
飞控型号:STM32F405
飞控固件:Betaflight4.5或者更高的版本
4)遥控器单元
遥控器:Jumper T14 ELRS 2.4Ghz
接收机:ELRS接收机,贝壳2.4Ghz
5)模拟图传单元
摄像头:Rumcam Pheonix
图传发射机:熊猫PandaRC VT5804 V2 600mW 48信道
接收眼镜:BeeRotor FPV视频眼镜
图传天线:RUSH棒棒糖天线
6)其他外设(可选)
GPS接收机:BN-250(练习机、非远航机不需配置)
BB响LED灯带:二合一LED板
7)充电单元
充电器:Toolkit M6D双路15A或者Hota D6 Pro
适配器:服务器拆机电源12V38A
外场电包:3S~4S 30~65AH锂电池组
第3节 组装机架
1)打磨机架边缘
穿越机碳纤维机架部件,在组装前可以使用600~1000目的砂布,将机架部件的锋利边缘进行轻微打磨,避免割伤皮肤(有倒边的则无需打磨)。打磨的粉不要溅落在皮肤上或吸入肺部,碳纤维微粒刺伤皮肤或进入毛孔会造成皮肤发痒疼痛,请妥善处理打磨所产生的碳纤维粉末,可用水洗法清理碳粉。品牌机架会在生产时进行倒角打磨和清洗,拿纸巾擦一下即可。


2)组装顺序
正确理解机架的设计和组装图,有些机臂安装是有方向性的,装错了会造成许多后续问题。机架通常先摆放假组一下,再进行组装。从底部中心板开始摆放,继而铺好机臂、卡梢、中间板,穿入安装固定螺钉并安装立柱。待装好飞控和电调及外设后,再安装上中心板。在底板上安装机臂、立柱螺丝时通常需要打一些螺丝胶,避免飞行中机架谐振造成的螺丝松脱现象。组装机架时在螺丝不滑丝的前提下尽可能地拧紧,能减少机架共振。使用更大扭力的螺钉,推荐使用芳生12.9N.M的螺钉。
机架组装好后,还需要做牢固性测试,检查机臂的紧固情况。给相邻两个机臂施加一定的同向(异向)张力,两个机臂之间不能出现安装虚位,如果机臂出现松动现象,请检查并再次紧固螺钉。
3)机架谐振与滤波
设计优秀的机架需要更好地衡量电子设备安装空间、机架重量、结构材质、加工工艺、抗变形强度、风阻等因素。电机转动和桨拉力会造成机架振动,机臂和机架的谐振大小是衡量机架品质的重要指标。谐振频率可以在黑匣子记录的数据里看到,好机架的振动少、振幅小、飞行更稳定;差的机架振动大,调参时滤波器设置环节会耗费更多的时间,也可能怎么设置都不好飞。滤波器压制幅度大的飞机,操控延时也会明显增加,使用更多滤波和多组陷波器的飞机,并不是一台理想的飞机。
第4节 安装电调与电机
机架和机臂安装好后,开始在机臂上安装电机,穿越机电机输出轴一般不分正反螺纹(穿越机极少用自紧桨),四个电机都可以使用相同螺纹,安装螺旋桨时适当紧固桨的螺帽,大量经验表明,不必担心螺纹方向导致螺帽松脱。
安装电机时一定要注意螺丝的长度!以拧紧后不超出电机安装底座的螺孔长度为最佳!螺丝过长会顶破电机底部的漆包线导致短路,严重情况下会烧毁电机!
电调(ESC)是飞控的命令执行机构,负责将飞控信号转换为电机所需的电流,从而控制电机的转速,电机则是穿越机的机械动力源。它们的安装与连接是动力系统组装的核心,直接影响到飞行的稳定性与动力响应。
1) 安装准备与确认
1-1)部件检查:在开始安装前,请务必确认准备好所有部件并理解其规格。确认电调与电机的数量(通常为4个)与计划搭建的机架(如5英寸)匹配。
1-2)规格匹配:确保电调的最大持续电流(如50A)足以满足电机的最大工作电流,并留有余量。同时,确认电机型号(如2306 kV2300)与电池电压(如4S)、螺旋桨尺寸相匹配。
1-3)工具准备:需要聚酸酯胶布、扎带、螺丝刀、烙铁、焊锡丝等。
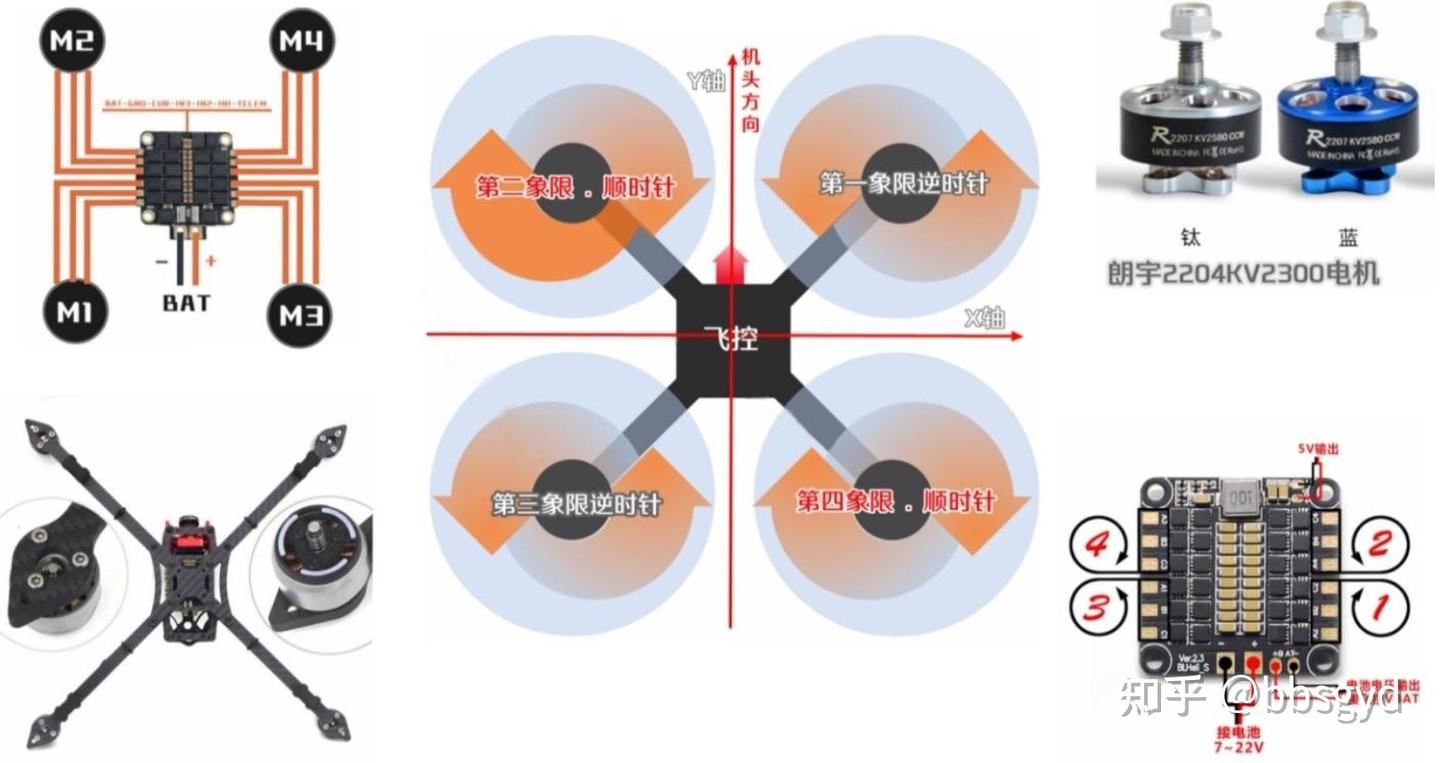
2) 电机安装
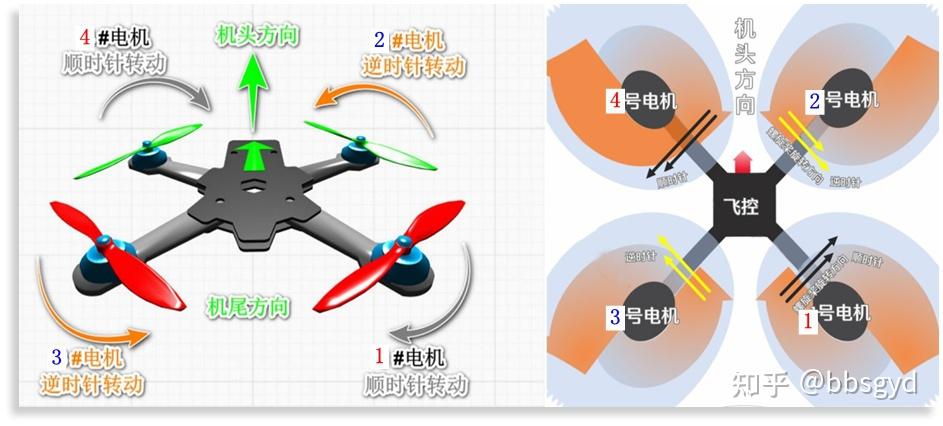
2-1)确定旋转方向:首先,为每个机臂规划好电机的旋转方向。穿越机必须遵循对角线电机转向相同的原则(“电机1”与“电机4”同向,“电机2”与“电机3”同向),且相邻电机转向相反,以抵消反扭矩。常见的转向模式有“电机朝向模式”(机头向前时,右前左后逆时针,左前右后顺时针)或“飞机模式”(基于机头方向定义)。
2-2)固定螺丝:使用电机配套的螺丝将电机牢固地固定在机臂上。螺丝长度必须恰到好处,以拧紧后绝不触碰到电机内部的铜线绕组为准。螺钉太长或拧得过深会损坏电机,导致短路或卡顿。固定螺钉的直径通常为3mm(M3),长度为机臂厚度+3mm。
2-3)标记方向:为避免混淆,可在安装后用标签纸在电机或机臂上临时标记其规划的转向(如CW/CCW或箭头方便后续调试参考)。
3) 电调安装与焊接
3-1)固定电调:将电调放置在机架中心板内(四合一电调)或机臂上(独立电调)。使用硅胶垫圈将机架和四合一电调做隔离,它们可在炸机时有效减震。独立电调需使用高质量的3M VHB双面胶或专用硅胶垫进行隔离,再用扎带进一步加固,防止飞行中脱落。通常在穿越机上使用四合一电调,分体电调多使用在大功率载重机型上。
3-2)焊接电源线:将电池座引出的正极红色线、负极黑色线与四合一电调板焊接在一起。分体电调需要正确连接电源线到分电板上(通常标有“+”、“B+”),电池座连线接到电源分配板的B+/B-上。
3-3)注意事项:焊接点应圆润、光滑、无虚焊。确保正负极焊点之间留有足够的安全距离,绝对避免短路,焊接后用万用表通断档检查正负极插座的连接是否短路。
3-4)焊接电机线:将电调的三相线(通常为三根无刷线,无顺序要求)焊接至电机对应的三个焊盘。此时无需考虑相序,因为电机的转向后期可通过软件或调换任意两根线的焊接位置来改变。
3-5)连接信号线:将飞控与电调连接排线安装牢固;分体电调的信号线(通常为白色或橙色)焊接至飞控上对应的电机信号焊盘(如 M1, M2, M3, M4 或 S1, S2, S3, S4),有严格的编号对应要求。
4)安装后的检查与测试
4-1)目视检查:在通电前,必须进行严谨的检查确认所有焊点牢固、无短路;电调固定稳妥;电机螺丝无松动且未顶伤线圈。
4-2)万用表检测:将万用表调到蜂鸣档或电阻档。将红表笔接触电源输入的正极(BAT+),黑表笔接触负极(GND)。正常应显示一个较大的阻值或无短路蜂鸣。如果阻值极小或蜂鸣器响,说明存在短路,必须排查故障后方可通电。
4-3)首次上电测试(非常重要)!
不装螺旋桨!在任何情况下,室内测试都绝对禁止安装螺旋桨。连接电池,观察飞控指示灯是否正常亮起,并听是否有电机振动提示音。
在飞控调参软件(如Betaflight Configurator)的“电机”选项卡中,在明确知晓风险并确认未装桨的前提下,手动拖动单个电机的滑块,测试该电机是否按指令启动、转动是否顺畅、有无异响。
测试完毕后,立即拔掉电池。
完成以上步骤,意味着穿越机的动力系统已基本安装就绪。接下来,即可进入飞控软件进行电机转向与顺序的最终配置。
电机的转向是依照飞控的混控类型选项决定的,通过电调的调参软件设置每一个电机的转向。1、2、3、4号电机的位置根据飞控调参里X混控机型设置,还需要调整电机转向,最简单的是调换电机任意两线的焊接位置。
第5节 安装、设置飞控
1)飞控安装与外设连接
电调和电机连线焊接完毕后安装飞控,穿越机飞控通常与四合一电调层叠安装,共用一套安装螺柱,它们之间用硅胶垫隔离,使用螺帽固定。
飞控要连接的外设比较多,这环节通常耗费的时间是最多的。连接飞控的主要设备有电调、接收机、摄像头、图传、GPS、BB响LED灯带。准备好飞控与外设连接图,按照图示连接,部分外设需要通过电烙铁将连线焊接到飞控对应端口的焊盘上。
http://www.dalrc.cn/DALRC/ (二维码自动识别)
电调通过排线连接飞控专用插口,如果飞控和电调是同一厂商提供的飞塔组合,直接连接即可。如果是不同飞控和电调厂商,需要依照各自的线序制作连接排线,这对新手来说是一件非常具有挑战性的工作,如果不小心将电源线接反,通电会烧毁飞控,所以,建议使用同一厂牌的飞塔组合。
外部设备连线后一定要检查线位的正确性,如果有疑问,要查阅外设和飞控的说明,确保连线正确,避免接错线导致外设无法通信或者烧毁现象的发生。
2)陀螺仪角度设置:飞控安装时规定了一个安装方向,飞控电路板上通常会印刷有一个V形小箭头,箭头所指方向为机头方向,箭头标识面通常定义为上面。当然,有些机架的飞控安装需要将上、下面倒过来,这就需要根据飞控默认参数,在BF调参软件里对飞控的陀螺仪角度进行对应设置。
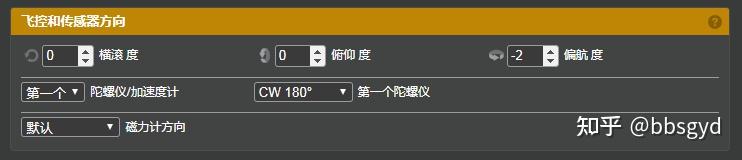
在BF调参软件的配置界面,将第一个陀螺仪的选项修改到符合混控类型和机头方向的角度;从默认正常安装到CW0°到翻转安装的CW0°flip 以及自定义Custom,每尝试设置一个参数后,需要保存重启飞控,再到设置的第一个页面去看陀螺仪三维模型监测图,摇动飞机直到三维模型的姿态变化和飞机实际动作都对应为止。
陀螺仪的安装角度选择错误时,飞机定义所对应的传感器方向不一致,相应电机编号也不能对应混控机型定义,飞机是起飞的。错误设置陀螺仪方向时解锁电机,稍加油门飞机会在地上跳街舞失控,贸然尝试起飞会损毁螺旋桨和电机。
如安装GPS定位接收机,需正确设置相GPS关参数后,将飞机置于开阔地上方可显示GPS定位经纬度数据,GPS定位成功后才能进行解锁电机测试。通常在调参设置中将GPS功能关闭,方便进行电机解锁测试。
第6节 连接接收机、图传、摄像头与外围设备
完成核心动力系统组装后,需要连接飞控、视频与辅助设备。这些部件的正确安装与配置,是实现飞行与控制的关键。
1)接收机连飞控
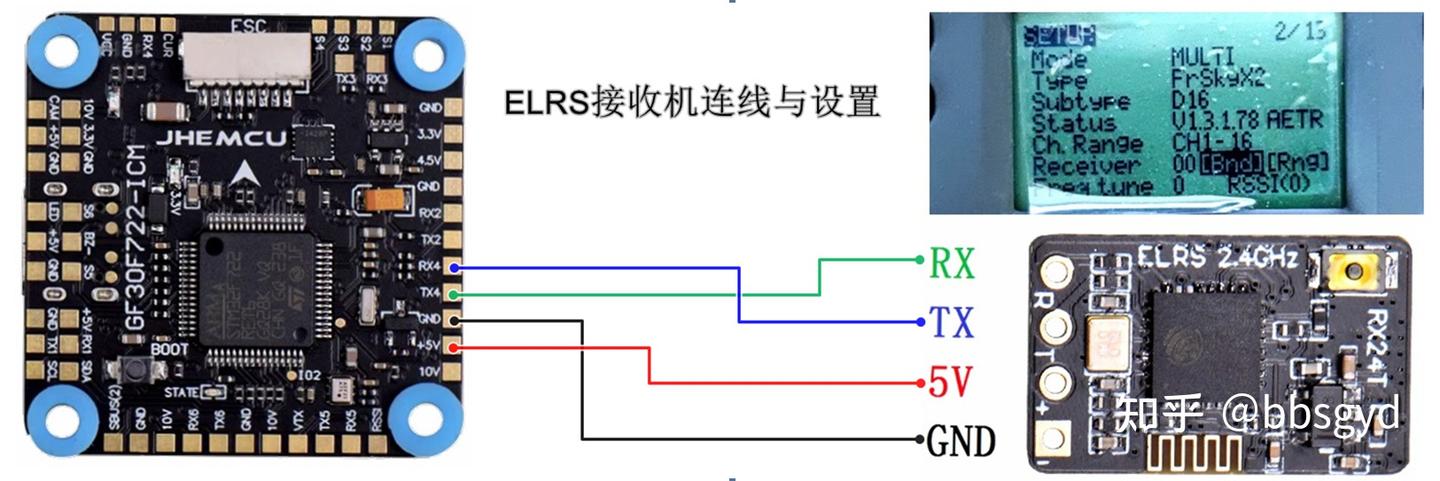
接收机是遥控器与飞控之间的通信桥梁,其连接需兼顾供电与信号传输协议。
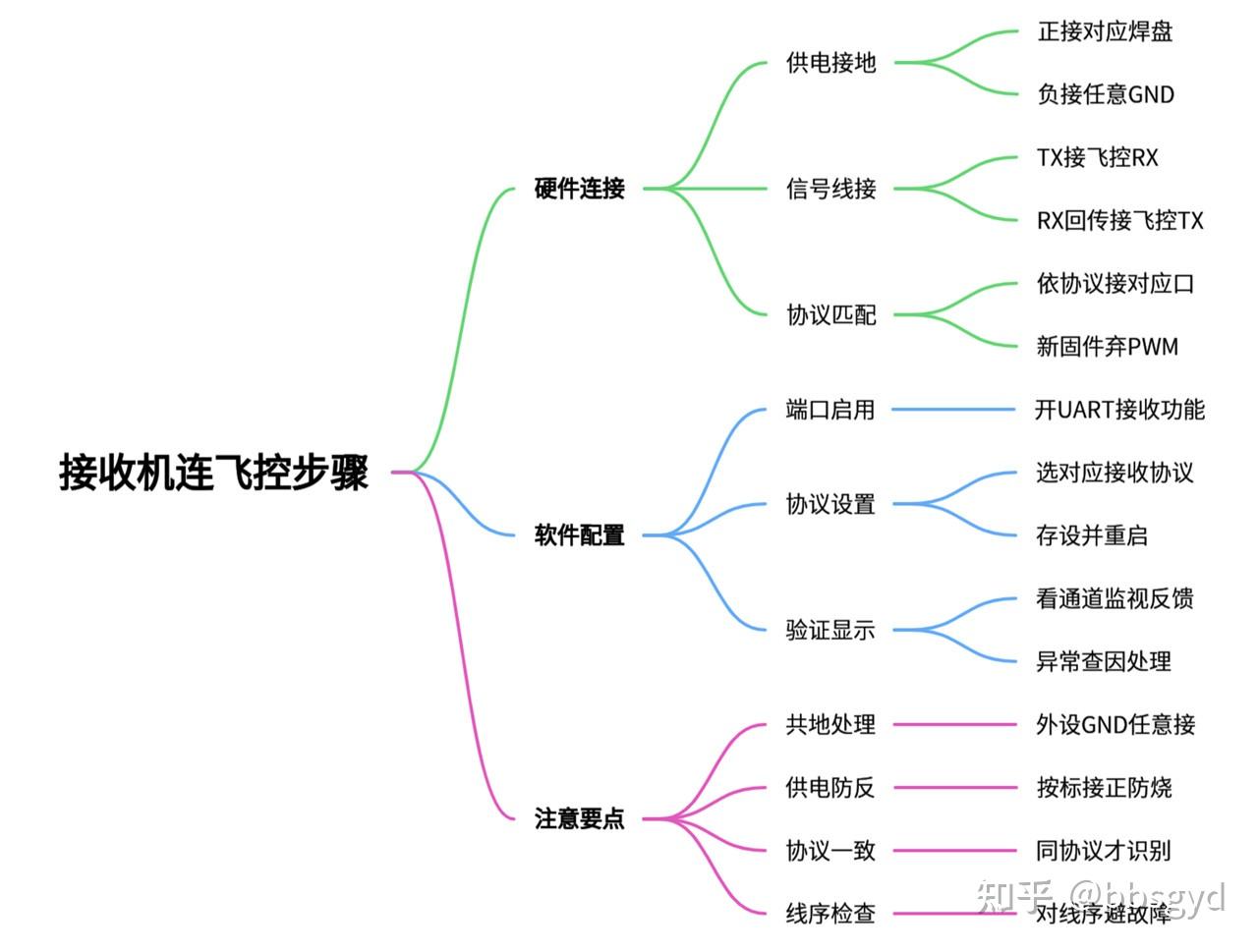
1-1)供电与信号线:将接收机的正极(通常为5V或3.3V)与飞控上对应的5V或3.3V焊盘连接;负极(GND)连接至飞控的任意GND焊盘。将接收机的TX端口连接至飞控一个空闲UART的RX端口,如接收机有信号回传功能,还需要将飞控的TX与接收机的RX端口进行连接,以便将飞控的遥测数据发送回地面接收端。
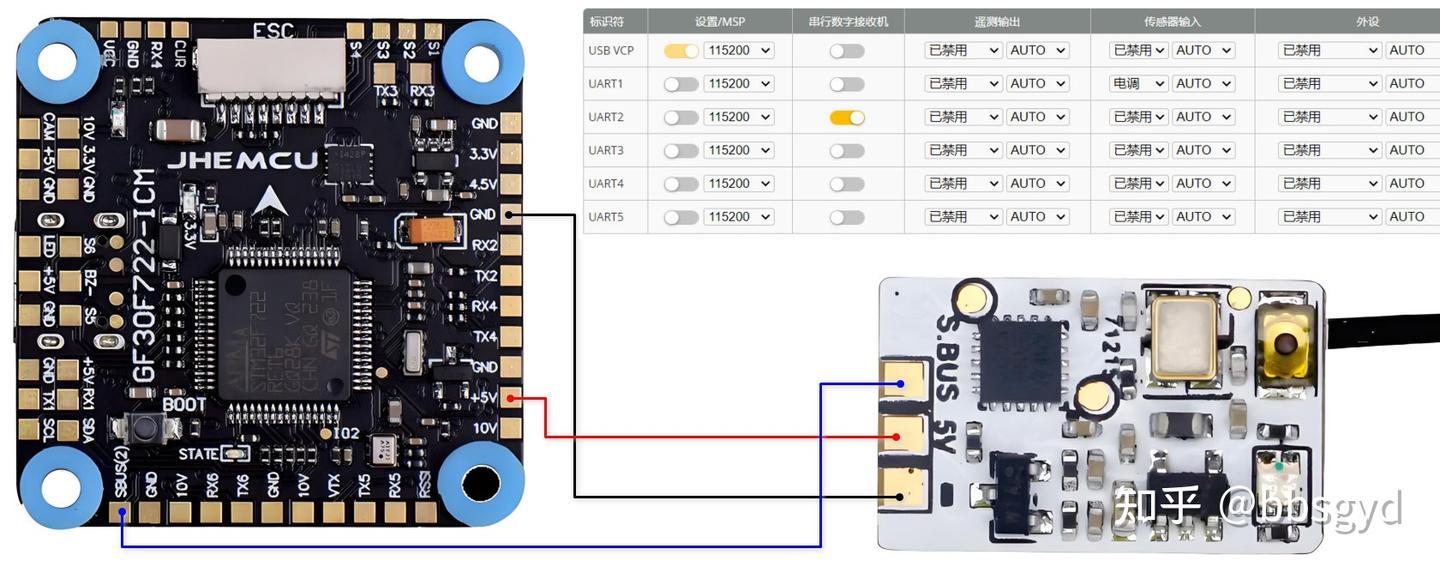
1-2)信号传输协议:根据接收机协议选择SBUS/CRSF 等串行协议。PPM/PWM等协议遵循特定协议对应的接线方式进行连接,飞控的I/O端口是很宝贵的,在BF4.0以后的固件中放弃了对PWM传输协议的支持。
在“配置”选项的“接收机”部分,将“接收机协议”设置为对应的协议(如SBUS、CRSF),并保存并重启,遥控器各通道的动作应在“接收机”页面的通道监视器中实时显示。如无法显示,需要检查遥控器、接收机对频状态,遥控器设置参数,飞控与接收机信号连线,飞控的接收机端口号设置和协议选择。
1-3)调参软件配置:在飞控调参软件Betaflight Configurator的“端口”选项中,启用该UART的“串行数字接收机”功能。
2)模拟摄像头与图传系统连飞控
摄像头与图传共同构成了FPV的“眼睛”,将第一视角画面实时传输至地面。
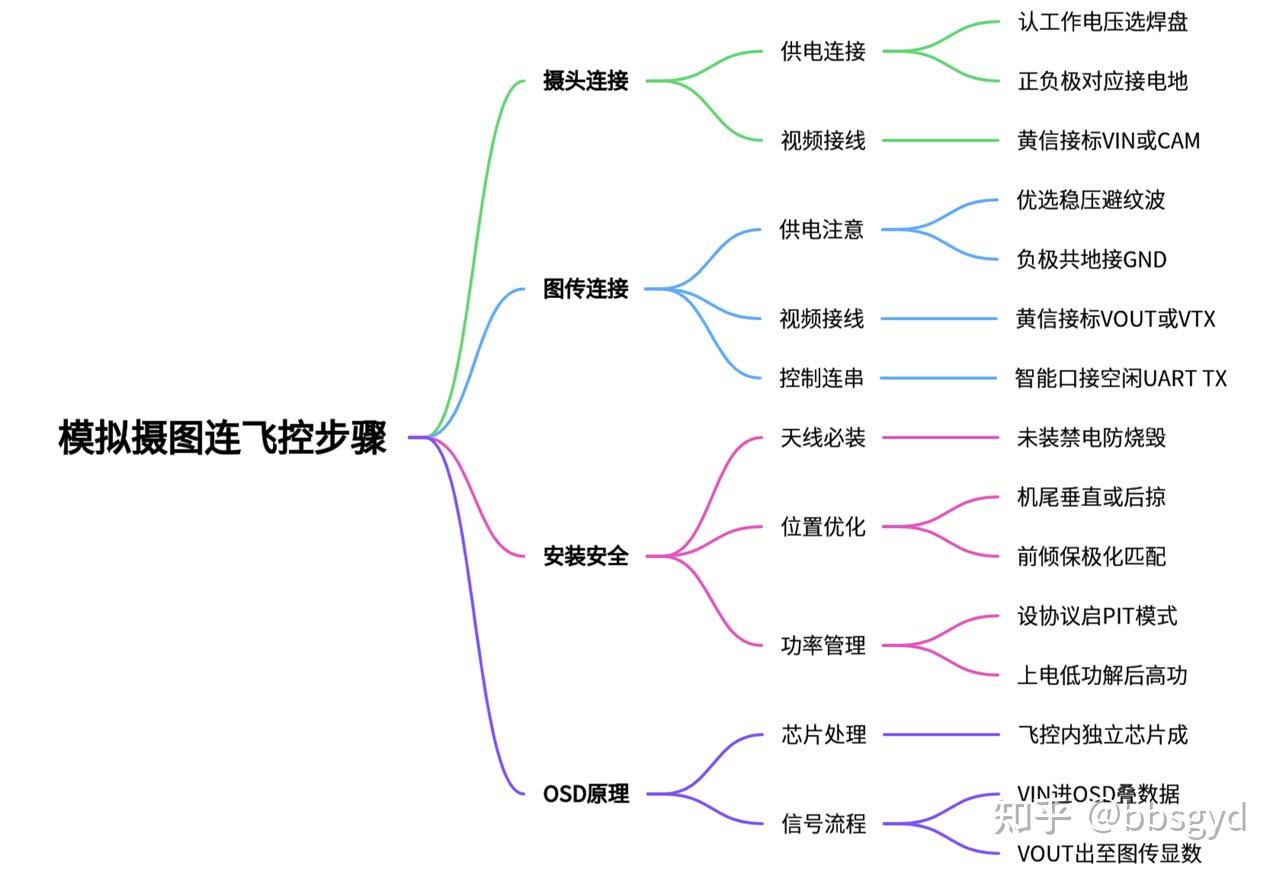
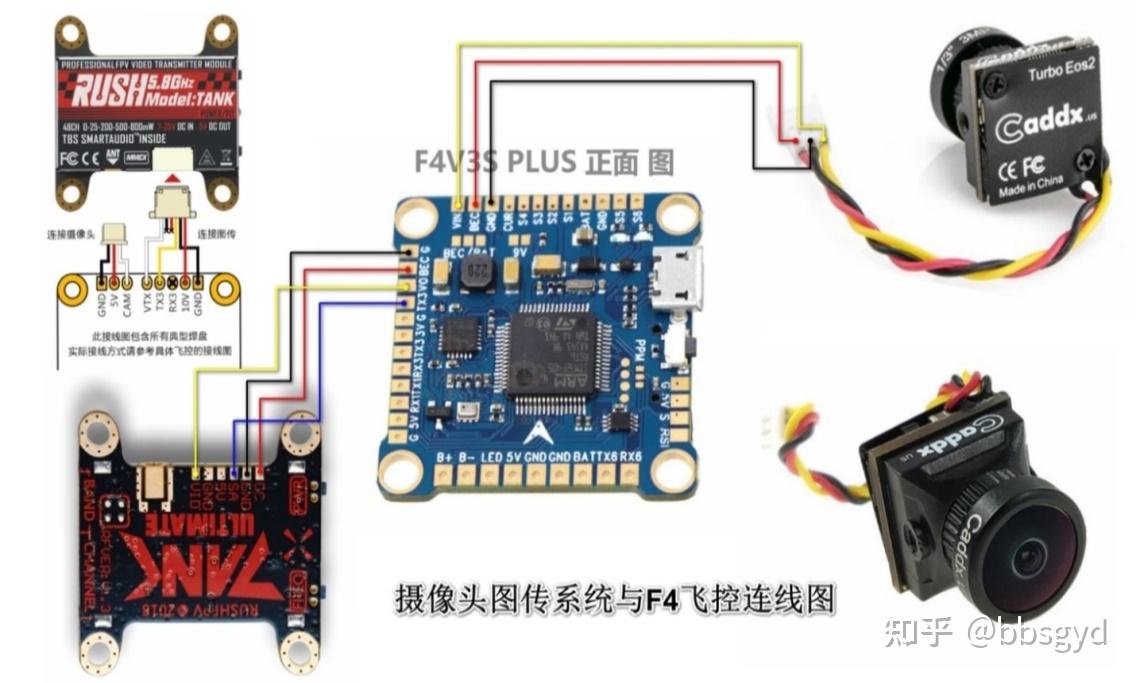
2-1)摄像头供电连接:确认摄像头的工作电压(常见为5V或7~36V宽压),并将其正极(通常为红色线)连接至飞控上对应的5V、9V、12V或电池正极(BAT+)焊盘;负极(黑色线)连接至飞控GND焊盘。
2-2)视频信号输出、输出:将摄像头的视频信号线(通常为黄色线)连接至飞控上标有VIN或CAM的焊盘。将图传的视频信号线(通常为黄色线)连接至飞控上标有VOUT或VTX的焊盘。
2-3)图传发射机供电连接:图传正极(红色线)建议接入飞控提供的9V或12V稳压输出,以减少电机工作带来的电源纹波干扰。若直接接入电池正极(BAT+),图像可能出现干扰波纹;图传的负极(黑色线)接飞控的地线GND焊盘。
2-4)控制信号(可选推荐):将图传调参控制端口(如DATA、TX)连接至飞控一个空闲UART的TX端口,此举便于通过遥控器在OSD菜单中更改图传信道与功率。
2-5)关于OSD字符叠加:飞控的VIN接收摄像头图像信号,经内部OSD芯片将飞行数据(如电压、RSSI)的文字或图形进行叠加后,从飞控的VOUT输出至图传VIN。因此,模拟摄像头与模拟图传必须通过飞控的OSD芯片“桥接”,地面端收到的视频图像才能显示飞控信息。数字图传的RX端口接收飞控TX送来的信息,通过编码后进行独立传输,地面端接收到这个信息后,将它解调出来并叠加到图像上进行显示。
也就是说,模拟图传发送的是飞控OSD芯片叠加字符后的视频图像,使用模拟图传时飞控需要配置OSD字符叠加芯片;数字图传是将飞控信息直接发送到地面端再叠加到图像中的,使用数字图传时,飞控无需配置OSD字符叠加芯片。
3) 关键安装与安全须知
3-1)图传天线安装(务必遵守):必须确保天线已牢固安装,方可给图传通电。空载通电会因能量无法有效辐射而反射回功放管,极易导致图传瞬间烧毁。天线安装位置建议在机尾,并使其与机身上盖板平面垂直或呈一定后掠角。这样在飞机前倾飞行时,天线能接近垂直于地面,与接收天线达到最佳极化匹配,使接收信号最佳。
3-2)图传功率管理:在飞控配置软件中设置图传协议(如SmartAudio),可启用“PIT模式”(低功率模式)。
建议将图传功率设置为飞机上电解锁前处于PIT模式,降低发热;解锁后自动切换至高功率模式,保证飞行距离。这能有效避免在地面调参时因散热不良导致的图传损坏。

4) 连接BB响与LED灯
BB响与LED灯是重要的飞控状态指示与飞丢寻机设备。
4-1)BB响蜂鸣器:其正极(+或BUZ+)通常接飞控的5V输出,负极(-或BUZ-)接飞控上标有B-、BB-或BUZ-的信号焊盘。在遥控器上设置一个开关,即可在飞机丢失时触发蜂鸣,通过声音定位。
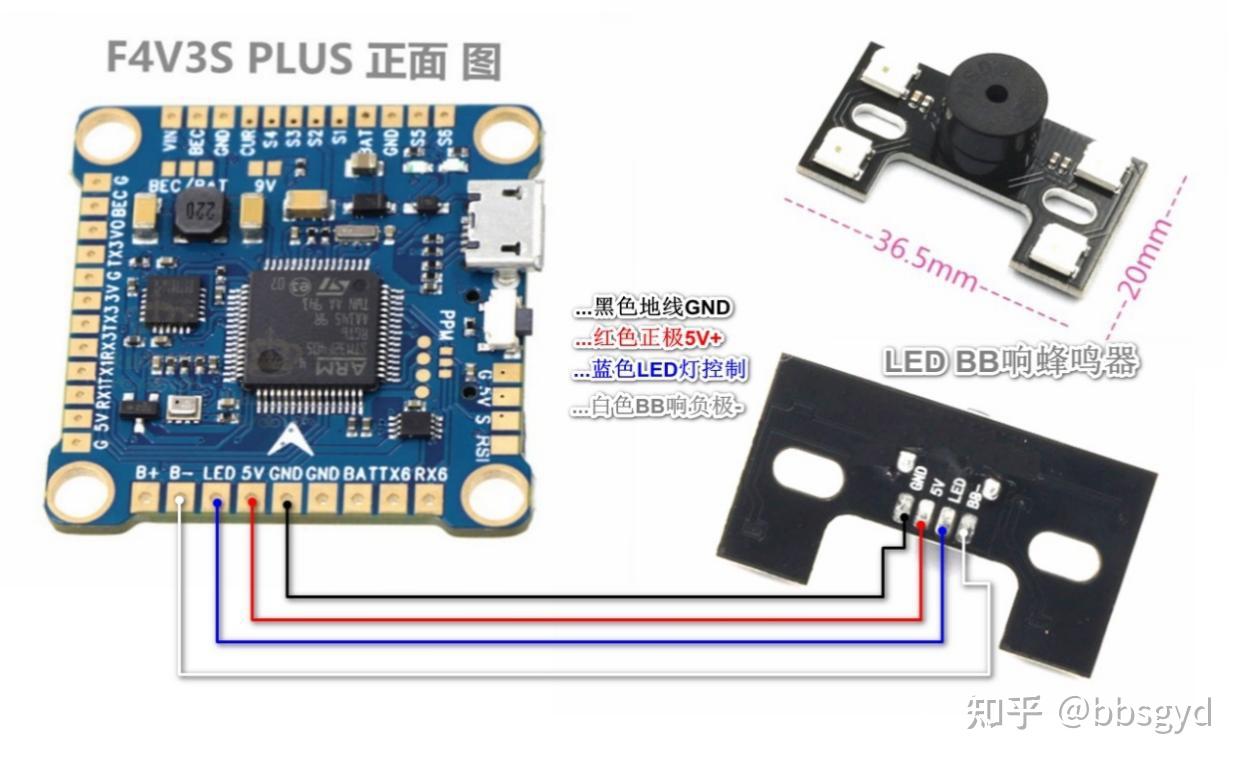
4-2)LED灯带:常见的WS2812智能灯带只需三根线:5V(供电)、GND(地线)和S/DATA(信号)。将信号线连接至飞控的LED焊盘,在调参软件灯带编程界面中,可自定义灯带排列编号和灯效(如颜色、闪烁模式),用于标识飞机或显示飞行状态。LED灯带也可通过遥控器的钮子开关通道控制开启和关闭,在寻机时启用声光提示。
LED灯带也可安装在机臂上,信号线并联,在竞速赛中用不同颜色代表飞机编号。花飞穿越机可采用LED灯BB响蜂鸣器集成部件,安装在机尾位置。
4-3)布线防护:所有外设导线都应使用扎带妥善固定,避免与螺旋桨干涉,并尽量缩短长度。松散的导线不仅是安全隐患,其振动产生的噪音还可能被飞控陀螺仪采集,影响飞行稳定性;安装导线遵循走线规整、长度适中、扎紧无晃动原则。
第7节 总调试飞
硬件组装全部完成后,再次仔细检查所有硬件连接项目,确保测试正常再试飞。
1)检查项目包含的内容
1-1)电池输入线连接电调的正负极焊盘,必须正确,否者上电即烧毁;
1-2)飞控连接电调的4条信号线线序正确,飞控接电调的BAT正负极线序正确;
1-3)确保螺旋桨给进方向正确,紧固桨叶螺帽,飞机上电自检正常;
1-4)遥控接收机连接飞控的线序正确,遥控器模型、通道、摇杆、对频正确;
1-5)飞控连接BF调参软件,电机解锁/锁闭通道、飞行模式切换通道正确;
1-6)校准陀螺仪,在BF软件中监控陀螺仪姿态,模型对应飞机姿态;
1-7)陀螺仪安装方向与飞机姿态匹配,设置PID、角速度、滤波参数;
1-8)通电测试飞控自检正常,飞行模式切换、BB响、LED测试正常;
1-9)解锁电机测试通过,1、2、3、4号电机旋转方向正确;
1-10)图传发射机天线、遥控器接收机天线紧固到位,确保它们不会干涉螺旋桨;
1-11)遥控器、FPV眼镜和飞行电池的电压为满电状态、电池绑扎稳固、电池导线晃动范围不会干涉螺旋桨。
以上检测完成后遵循穿越机安全防护原则进行试飞。一定要选择在无人的空地飞行,人机保持安全距离,机尾对着自己,解锁电机后尝试缓慢增加油门直到飞机离开地面,观察飞机是否受控,是否发生轻微抖动等现象。如果你没有进行过穿越机基础操控的练习,请参考前面相应章节内容进行必要的基础操控练习,再开始测试飞机。
2)PID与滤波参数设置
完成基础起飞测试并确认飞行器无明显问题后,即可进入参数调优阶段,其核心在于根据实际硬件配置优化PID控制器与滤波器设置,以提升飞行性能与稳定性,基本调参流程如下。
2-1)试飞数据采集:清空飞控黑匣子存储器,并开启记录功能。
进行一次持续一分钟以上的洁净数据采集试飞。飞行中应较为轻柔、缓慢地将各轴向(横滚、俯仰、偏航)的操控杆量推至最大行程。
关键要求:确保飞行器在整个试飞过程中不与任何物体(包括地面)发生触碰,以获取能真实反映机体动态的有效数据。
2-2)数据分析与参数调整:将黑匣子记录的飞行数据文件导入电脑调参软件Betaflight Blackbox Explorer,重点分析PID阶跃响应图与振动频率频谱图。阶跃图反映了飞行器对角速度操控指令的响应速度与稳定性;频谱图则揭示了机体的共振频率分布与噪声烈度。
依据数据分析结果,有针对性地调整PID增益与滤波器参数迭代优化,将修改后的参数写入飞控,再次进行试飞并采集数据,对比新旧数据,评估调整效果,并进一步修正参数。重复此过程,经过数次“飞行-分析-调整”的循环,直至飞行器的角速度操控响,应达到当前硬件条件下的最佳状态。至此,穿越机的组装与基本参数设置工作即告完成。
2-3)给新手的重点提醒与建议:PID与滤波器的深度调参是一项复杂且专业的工作,需要投入大量时间系统学习与实践。对于初次组装穿越机的新手而言,无需急于深入此领域。建议在调参软件中,直接套用与您硬件配置(如机架尺寸、电机型号)相似的、经过验证的预设参数(PID预设或差分方案),让飞机能安全起飞即可。
在此阶段,因经验门槛所限,新手往往缺乏足够的知识储备来分析数据,并理解各项参数改变的物理意义;因感知标准缺失,在尚未建立对“好飞”和“跟手”等主观体验的明确标准前,是难以判断PID和滤波参数的调整方向;因操控水平限制,精调PID要求飞手具备稳定、规范的操控能力以提供有效的输入信号,在操控技能尚不熟练时,采集的数据将无法用于准确判断PID优劣。
因此,建议先将重心放在熟练基础飞行操控上。待飞行经验积累到一定程度,对飞行操控有感和对飞机性能有了切身感知和明确需求后,再结合《穿越机技术基础》等系列资料中的进阶资料系统学习PID精调、RPM滤波等高级技巧,方是水到渠成之举。
第8节 穿越机维修
在飞行练习过程中,炸机难以避免,每次事故都可能对机体造成不同程度的损伤。无论是螺旋桨破损、电机轴弯曲还是机臂断裂,都会直接影响后续飞行安全与性能,因此必须进行及时维修与必要的参数调整。
- 常见损伤与维修流程
1-1)螺旋桨更换:螺旋桨是最易损的部件。炸机后若发现桨叶变形、缺损或断裂,必须立即更换。
操作步骤:拆除受损桨叶,按照正确的电机旋转方向安装新螺旋桨,并紧固桨帽。
更换后检查:用手轻轻转动桨叶,感受电机转动是否顺滑,初步判断电机轴承是否受损。
1-2)电机检查与更换:炸机可能导致电机轴轻微弯曲,即便肉眼难以察觉,也会在旋转时产生剧烈振动。
症状与影响:飞行中会引发整机共振,产生异常振动噪声,干扰飞控稳定性。
诊断与处理:更换新螺旋桨后若振动依然严重,应启用黑匣子记录仪进行试飞。分析采集到的数据,通过频谱图定位振动频率,并利用滤波器(特别是陷波器)进行针对性压制。若飞控已开启RPM滤波,系统可自动滤除由电机引起的规律性振动,但若振动幅度过大,RPM滤波可能无法完全消除电机缺陷造成的振动。
若经上述处理振动的方法仍无法有效抑制振动,则表明电机内部可能已受损,最稳妥的方案是直接更换电机。
1-3)机架与机臂更换:机臂破损和断裂属于结构性损伤,通常伴随电机、电调等周边部件的潜在损坏,增大了飞行安全隐患。
维修与检查:更换断裂的机臂时,必须仔细检查固定在该机臂上的电机是否撞歪,线路是否破损。
潜在风险:严重的撞击还可能对飞控板造成隐性损伤。维修后试飞需格外谨慎,密切观察飞行表现,记录任何异常情况以便排查。
- 维修原则与注意事项
2-1)系统性检查:维修不应仅限于明显损坏的部件。在更换主要损坏件后,必须对整机进行系统性检查,观察其它部位是否存在松动、裂纹或性能下降等潜在问题,将隐患消除在萌芽状态。
2-2)部件更换准则:优先更换同型号部件,为保证最佳的飞行性能与一致性,维修时应优先选用与原部件完全相同型号的备件进行更换。
2-3)电机替换:电机的型号和KV值必须保持一致。在迫不得已时,可用型号和KV值相近的电机临时代换,但应避免进行暴力飞行,因其动力响应差异可能引发操控失误,导致再次炸机。
2-4)飞控更换:更换飞控时,需要将电调数据排线、外设连接电缆重新排布,对外设端口、协议参数重新配置,对飞行控制参数重新设定并进行试飞优化。
2-5)电调协议:更换电调使用DSHOT协议,无需油门行程校准,但需要选用符合滤波参数的协议,如DSHOT300。若使用PWM协议电调,需重新进行油门行程校准。
2-6)外设重置:更换接收机、图传、摄像头等外设后,通常需要在飞控调参软件中进行相应的端口与协议设置,确认功能正常后方可试飞。
第四章 多旋翼穿越机调参基础
第1节 下载并安装F4飞控驱动和Betaflight调参软件
1)下载并安装BF软件: Betaflight简称BF,该软件可以安装在windows7-11的系统上,安装完成后会在桌面上出现一个蜂鸟的快捷图标。如何下载它呢?这是github软件开源托管库中Betaflight官方网站地址:https://github.com/betaflight/betaflight-configurator/releases/
境外网络资源载入有点慢,需要等待的时间较长,要有耐心。
2)网页版调参软件(PWA版):你也可以使用Chrome谷歌浏览访问BF固件调参页面进行飞控固件参数设置,网址https://app.betaflight.com/。
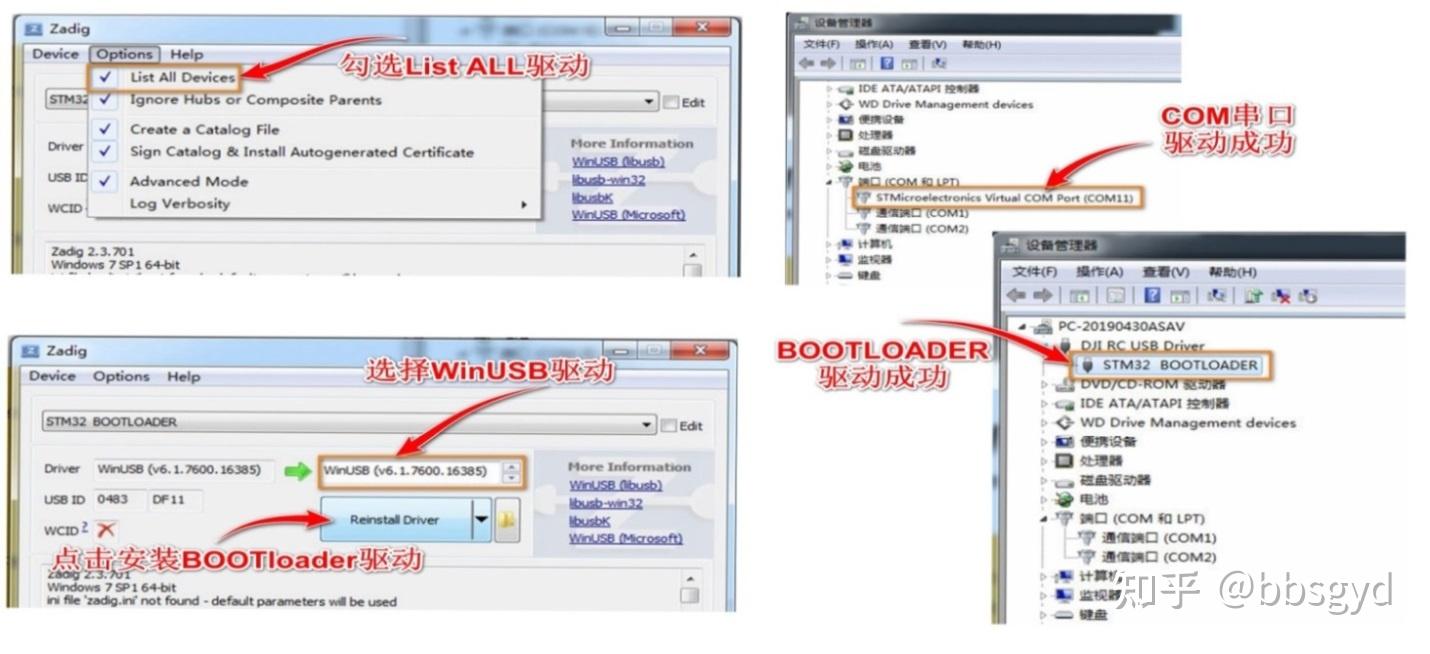
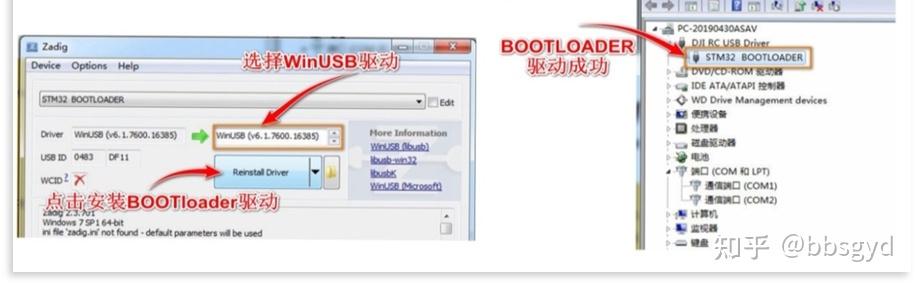
3)飞控的驱动安装主要涉及两种模式:一是用于日常调参的 USB虚拟串口(COM端口)驱动,二是用于固件刷写的 BOOT模式下的USB虚拟DFU端口驱动。这两者用途不同,驱动也完全不同。安装BOOT驱动时需先按压飞控上的模式切换按钮再给飞控通电,进入BOOT模式,系统识别到新的硬件,再运行Zadig驱动工具进行设置。
安装调参模式下的COM端口驱动时,如果遇到驱动无法正常安装,或在设备管理器中找不到STMicroelectronics Virtual COM Port (COMxx)端口,或端口出现但无法通信的情况,可以尝试使用驱动精灵或360驱动大师等工具。它们能够自动检测并安装缺失的系统组件或驱动,解决因系统环境不完整导致的安装失败问题。
驱动安装完成后,请务必使用一条质量优良的、支持数据传输的USB线连接飞控与电脑。劣质或仅支持充电的数据线是导致电脑无法识别飞控的常见原因之一,若遇到设备无法被发现或无法良好连接,首先应排查数据线。
如果不需要刷写飞控固件程序,就无需安装Zadig驱动程序,只需要安装飞控的COM口驱动,即可进行飞控的联机调参设置工作。
第2节 设置页面
用USB信号线将飞控接入电脑后,启动BetaFlight地面站软件或访问网址https://app.betaflight.com/,在软件的初始连接界面选择飞控设备端口,点击“连接”按钮进入飞控的BF调参页面,开始对飞控固件进行参数设定。
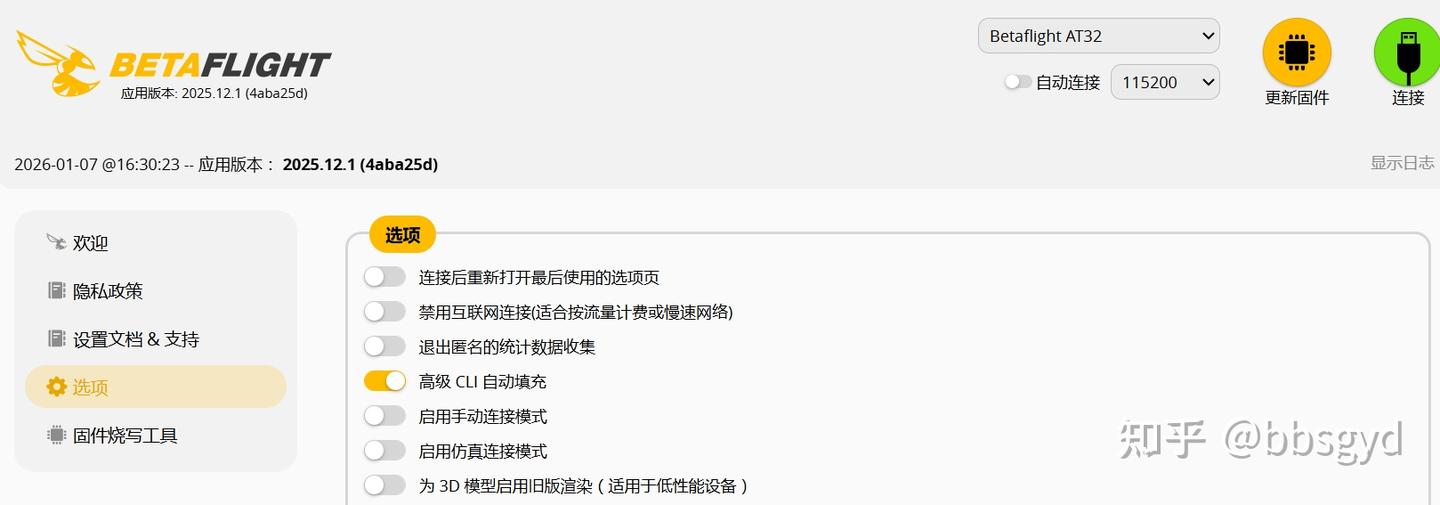
1)恢复默认设置:重要提示-请不要去点击这个按钮,飞控会变砖。进入BF调参界面,在设置页面下,点击“恢复默认设置”一次,这个操作将会把飞控内部的可变参数设定恢复到一个默认的初始状态,之前对飞控进行的所有参数修改都复位了,飞控需要重新设定参数,也可用原先备份的飞控设置数据恢复参数。
谨记:在点击“恢复默认设置”前,需要备份飞控的I/O设置命令行,如果出现校准角速度计按钮变灰色,就需要用备份的配置命令来恢复飞控配置。备份配置可在CLI命令行中输入DUMP显示所有配置命令行,将它们复制到一个文本文件中保存。

2)校准陀螺仪:校准前,请将飞行器(飞控板)水平静置于台面,随后在调参软件中点击 “校准加速度计” 按钮。此操作将使飞控记录当前状态下陀螺仪与加速度计的水平静止基准。该参数直接影响后续飞行表现。
在自稳或半自稳模式下,飞行器的俯仰与滚转轴向所感知的“水平”状态均以此校准结果为参照。若未准确校准,或因震动、陀螺仪自身精度漂移等因素影响,飞行中可能出现机体倾斜或自动漂移等现象。
在按比例手动模式下,由于系统不再参照加速度计的水平基准进行姿态修正,理想情况下不会因校准偏差产生固定的倾斜现象,但仍依赖陀螺仪数据测算姿态角速度。
3)备份参数:该按钮用于备份飞控调的配置参数,这些参数会生成一个文本文件,通过自定义文件名,可以很好地管理不同飞控和不同设定参数备份。
4) 恢复参数:用先前保存的备份设置数据文件来恢复飞控的配置参数,无需再次重新一项一项地配置这些参数。这个界面下的恢复按钮仅限于恢复调参选项里的数据,无法恢复通过CLI命令行窗口输入的相关配置参数,恢复时如有需要,还是得再次通过CLI命令行窗口对某些特别的设定值进行配置。
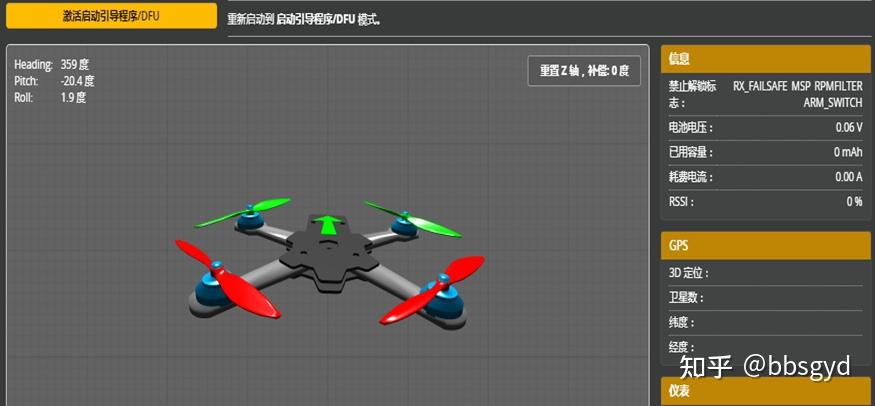
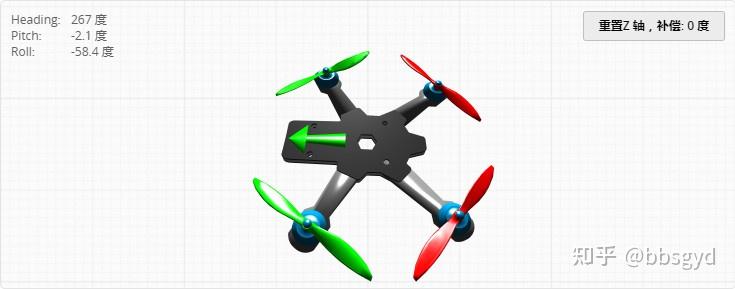
5)陀螺仪姿态观测:在本页面中,您可实时观察飞行器的三维姿态图示。当您手动转动飞行器时,模型应与其保持同步,在俯仰、滚转和航向轴上作出完全一致的方向变化。
方向一致性校验与修正方法如下。
观察比对:仔细对比模型与实物的转动方向是否一致。
方向修正:如方向不一致,在“配置”页面 → “飞控和传感器方向”里设置。
参数设置:通过选择正确的“加速度计安装方向角”参数,来修正物理安装带来的角度差异。
保存并验证:保存设置并重启飞控后,返回本页面再次观察,重复以上步骤,直至模型姿态与飞行器真实姿态在所有轴上均完全对应。
6)安全警告:此项设置至关重要!正确的方向设定是陀螺仪识别机头朝向的基础,是多旋翼飞行器能够稳定起飞的前提。若设置错误,飞行控制器将基于错误的姿态信息进行修正,贸然起飞会立即导致失控并引发严重事故! 在进行此项调试前,务必遵循安全规范,拆卸所有螺旋桨!
7)飞行器姿态轴:以下是飞行器在三维空间中的三种基本姿态运动,它们分别围绕机体的三个轴进行。
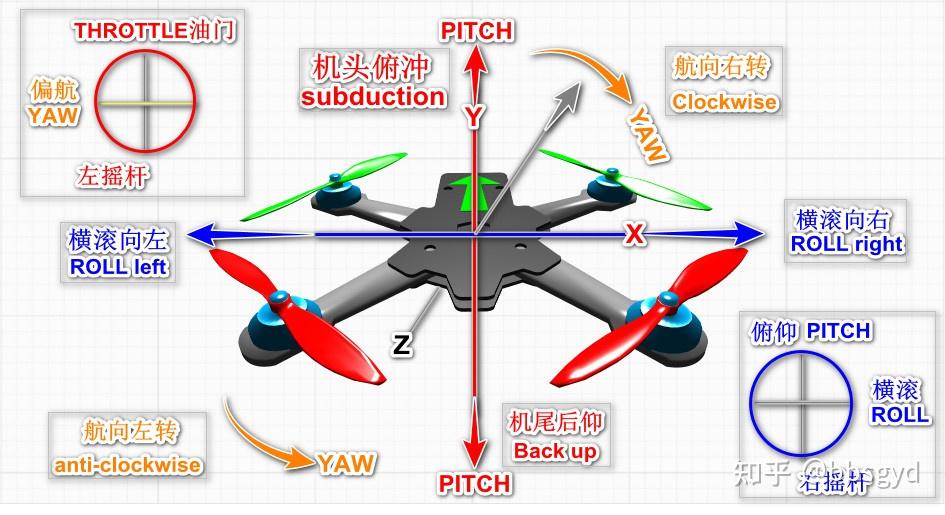
俯仰轴系:Pitch,绕Y轴旋转。
动作描述:指机头上抬或下压的运动,类似于“点头”和“仰头”。
飞行效果:此运动直接控制飞行器向前或向后的飞行。
滚转轴系:Roll,绕X轴旋转。
动作描述:指机身向左或向右的倾斜运动,类似于“侧身”或“翻滚”。
飞行效果:此运动直接控制飞行器向左侧或右侧的平移。绕Y轴连续旋转360度即为“横滚”特技动作。
航向轴系:Yaw,绕Z轴旋转。
动作描述:指机头方向在水平面内向左或向右的改变,类似于“摇头”。
飞行效果:此运动改变飞行器的朝向(航向角),而不改变其水平位置。绕Z轴连续旋转360度即完成一次方向回环。
第3节 端口页面

软件提示:并非所有的端口开启组合都是有效的,如果飞控检查到某组合不能同时工作,对应串口的设置将会被重置,设置无效。
注意:千万不要关闭第一个串口的MSP选项,否则你可能要重新烧录固件并清空(丢失)所有设置,这是连接电脑的端口,关闭它将会很麻烦,请勿尝试!!!
默认接收机端口有时会被隐藏,不出现在列表里,无需开启任何端口就能使用默认接收机端口,对于大多数飞控来说,连接串行接收机需要开启对应的物理端口;UART端口就像一台电脑的外接扩展口,可以连接外部功能设备。
第4节 配置页面
1)软件提示:并非所有的功能都能同时被启用。
当飞控检测到有冲突时会禁用相应的功能,设置无效。注意: 请在端口页面先设置串口并开启正确,重启飞控后再启用需要用到端口连接外设,就是说一定要分两步进行设置。
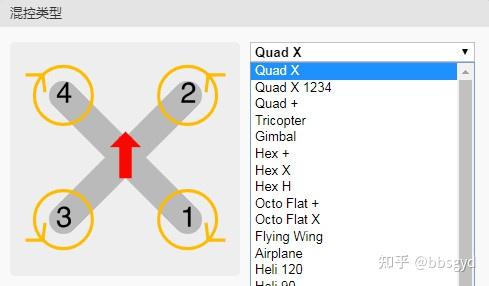
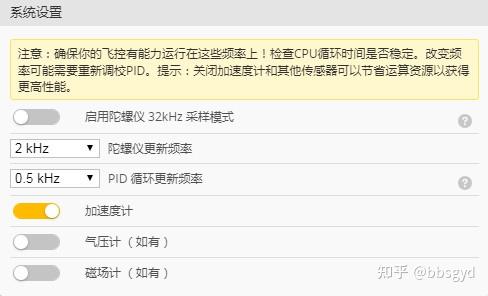
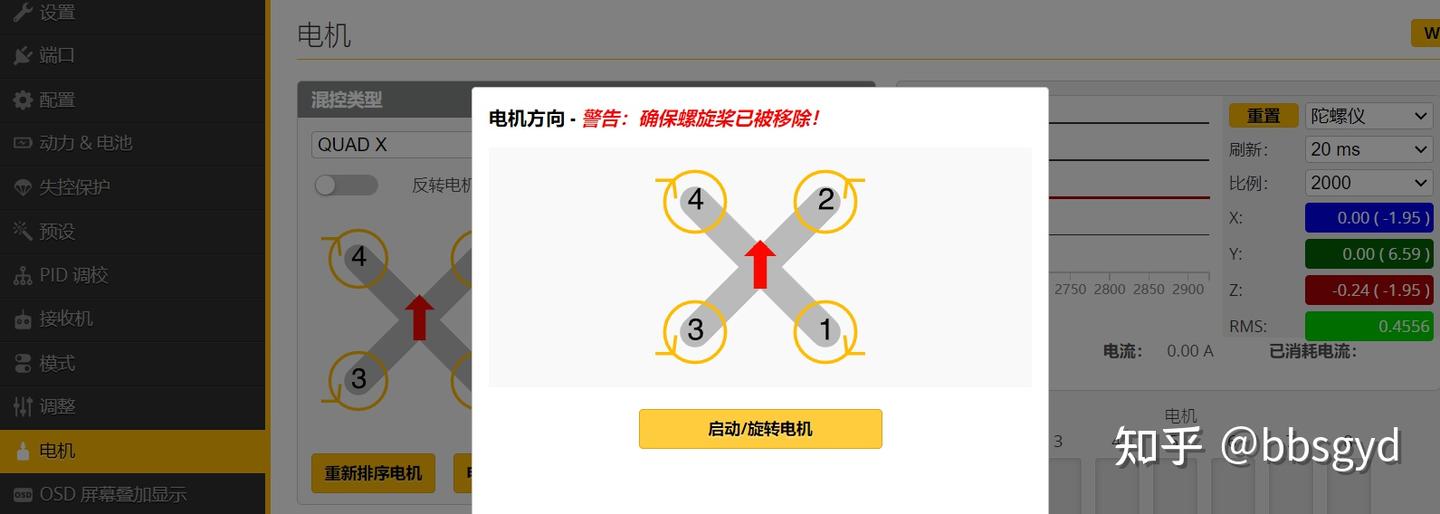
2)混控类型:就是飞机的动力布局。四轴飞行器常采用Quad X布局,注意看“混控类型”的电机定义编号和电机旋转方向,硬件组装时调整电机旋转方向需按照混控类型的要求来做,不同的混控类型,电机旋转方向可能不一样。
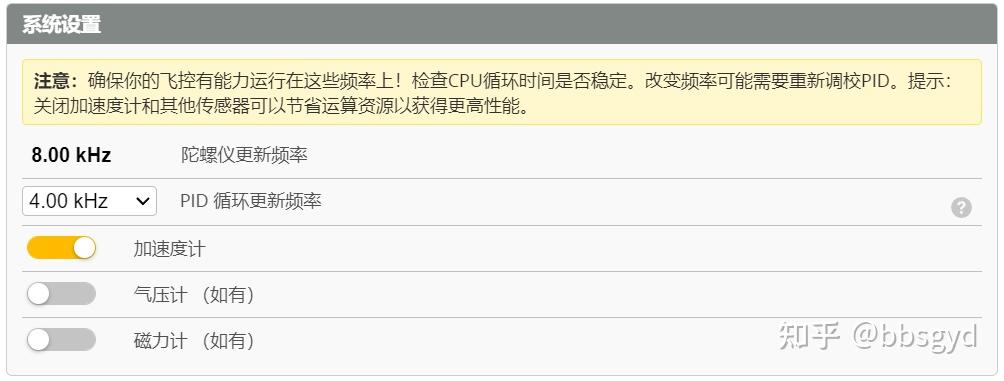
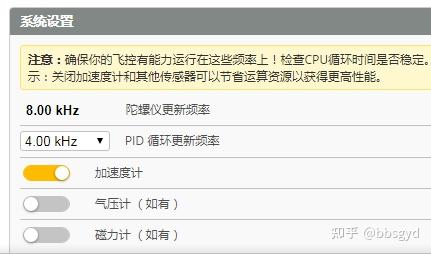
3)系统设置:主要是开启加速度计,设置陀螺仪的更新频率和PID循环更新频率;所选的数值越大,采样速率越高,飞机的动作就越细腻灵敏;对于大轴距的飞机来说,使用较低的陀螺仪更新频率会使飞行动作更稳定顺滑易于操控,因为减少了采样和处理频率,调整飞机姿态的电机转速变化更慢一些,会更省电。
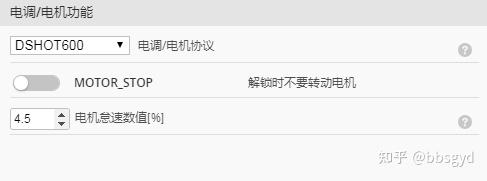

4)电调与电机设置:通常四合一电调普遍采用DSHOT协议,新版Betaflight固件已不再支持PWM协议。如需使用传统的PWM协议,必须进行电调的油门行程校准。
重要提示:如果您的电调支持双向DSHOT功能,请务必开启。这是启用RPM滤波器的必要前提。RPM滤波器是一种智能的动态陷波滤波器,它能根据实时电机转速自动调整滤波中心频率,以极低的延迟有效滤除与电机转动而产生的陀螺仪噪声。
5)飞控与传感器方向:此设置至关重要,直接关系到飞行器能否正常起飞。如“飞控初始化”部分所述,若实际飞行器的姿态变化与调参软件中的模型显示不一致,需进入本栏目,选择正确的加速度计与陀螺仪安装方向。保存并重启后,反复验证直至模型与实物的姿态变化完全对应。
安全警告:此项参数若设置错误,飞行控制器将基于错误的姿态信息进行修正。一旦推油门,极易导致飞行器瞬间失控炸机。调试前务必遵守安全规程,拆卸螺旋桨!

6)加速度计微调:一般不需要调整,就算调到完美,穿越机在手动模式下升空,悬停姿态一样会漂移,无法利用加速度计实现自主悬停。
7)横滚微调:正数为水平向左角度修正调整,负数为水平向右角度修正调整。
8)个性化:突然发现名字的输入内容不支持中文,真的太个性化了。
9)摄像头角度设置:在FPV飞行阶段时进行的设置;此参数影响OSD模拟地平线的准确程度。如果需要使用相关功能就精确设置,否则不用管。
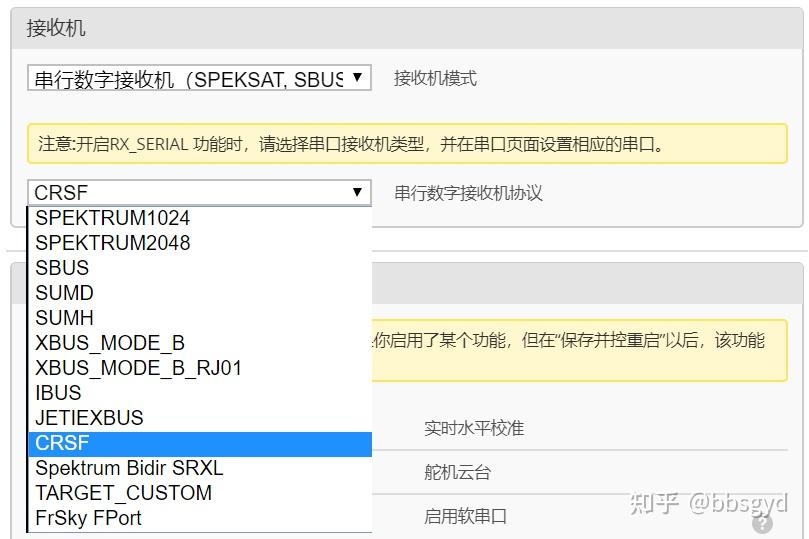
10)接收机:接收机端口的通信模式,多为串行数字接收机,有些使用MSP端口控制模式。如接收机与飞控采用RX/TX交叉线缆连接,就选串行数字接收机模式。
端口模式下的协议类型,常用的有SBUS等,其中ELRS接收机选CRSF协议。

11)其他功能设置栏:开启LED_STRIP彩色RGB LED灯带,如图所示的其他选项也可开启;信标配置按需要开启,默认是关闭的;蜂鸣器设置可以全部打开。
12)RSSI接收机信号强度回传设置:把接收机当前接收到的遥控器发射信号强度数值,加载到图传OSD画面上,通过图传菜单显示信号强度,同时也告诉操控者,此时飞机端收到的遥控器发射信号强度值,作为是否可以继续飞远的参考。
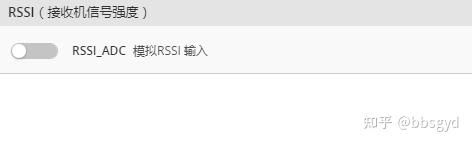
RSSI信号强度回传处理过程:
12-1)测量位置:信号测量(Measurement)在飞行器上的接收机中完成。
处理过程:接收机持续监测从地面遥控器发射过来的无线电信号强度。这个强度值是一个模拟电压值或数字参数,它直接反映了当前链路的质量。信号越强,RSSI值越高;信号越弱(可能因为距离远、有遮挡、天线方向不佳等),值就越低。
12-2)合成位置:数据处理与传输(Data Handling & Transmission)在飞行器端,由飞控、图传发射器协作完成。
处理过程:接收机将测量到的RSSI数值通过特定的通信协议(如SBUS、PWM、FPort等)发送给飞控。飞控将这个RSSI数据作为OSD信息的一部分,叠加到摄像头传来的视频信号中。这个“视频+OSD数据”的复合信号被发送给图传发射器。图传发射器将整个复合信号一同调制并通过无线电波发射出去。
12-3)接收位置:信号接收与显示(Reception & Display)在地面端,由飞行员的接收与显示设备完成。
处理过程:图传接收机接收到来自天空端的无线电信号,并解调出原始的“视频+OSD数据”复合信号。FPV显示屏或眼镜直接显示这个视频画面。由于RSSI信息已经被内嵌在OSD层中,因此它就像水印一样,稳定地显示在屏幕的特定位置(通常在顶部或角落),供飞行员实时读取。
12-4)技术实现方式
模拟式(PWM/Analog):早期或低成本的做法是在接收机端输出一个与信号强度成正比的PWM波形或电压,飞控的某个通道直接读取这个电压并将其转换为一个可显示的数值,传输给图传文字叠加单元。
数字式(Digital):也是目前的主流方式,RSSI作为一个数据字段,直接封装在接收机发送给飞控的数字协议中(如SBUS、FPort)。这种方式精度更高,抗干扰更好,也是双向DSHOT等现代协议的基础。
总结:简单来说,RSSI回传的工作原理就是一个 “天上测量,天上编码,与视频一同下发,地上显示” 的过程。它巧妙利用了图传链路作为载体,将关键的遥控链路状态信息实时反馈给飞行员,形成了一个完整的监控闭环,是保障飞行安全和扩大飞行范围不可或缺的功能。
第5节 电力&电池
1)电池与电压计设置栏:将电池单芯电压设置到3.60V,最低单芯电压设置在3.50V。飞行中当动力电池的单芯换算电压低至3.6V时,飞控通过BB响发出BB..BB..BB的响声提示低电量告警,并在图传视频画面上显示低电压提示字符,飞机应当立即返航降落更换电池。当电池电压低至3.5V时,BB响告警器发出更紧促的报警音,提示电量将要耗尽,飞机距离较远时可能会电能耗尽摔机。


2)电压计和电流计:都设置为板载传感器,比例110、分压器10、倍数1。如监测的电压与电池实际电压不相同时,具体数值应该咨询飞控制作厂商,再进行修正。

对于超高电压(大于等于8S)的电调,若要安全地获取准确的电压,可以使用电调传感器获取电流和电压,前提是电调支持回传功能,将电调回传对应端口的传感器设置为“电调”,并将电池选项卡中的电压计和电流计设置为“电调传感器”。
电调传感器可将电调的电流、电池电压、温度测量数据通过该端口传输到飞控上,由飞控进行使用。
第6节 接收机
在正确完成遥控器协议设置、接收机对频、飞控接收机选项启用及飞控接收机端口配置这四个关键环节后,即可在本页面看到各遥控通道的实时数据图示。
1)接收机模式:穿越机通常应选择串行数字接收机,具体协议需与硬件匹配。大疆高清天空端内置接收机选SBUS协议;ELRS/黑羊(TBS Crossfire)接收机选CRSF协议。穿越机BF固件的较新版本通常已不支持PWM协议;飞控板的接收机端口若同时支持SBUS、PPM协议,可同为一个物理连接点,但不能同时使用两种协议,在进行二选一时,通常可通过飞控板上设置的跳线对应接收机信号模式。
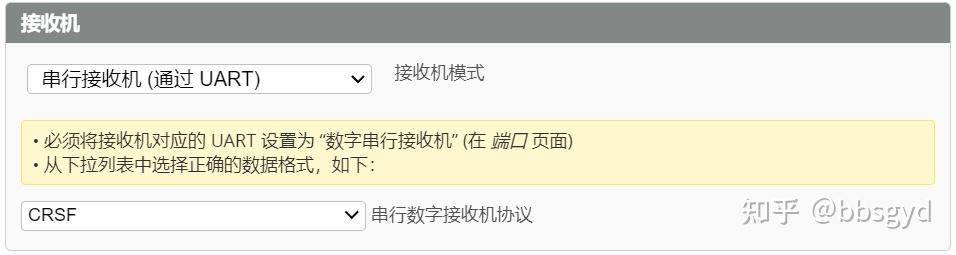
重要提示:遥控器输出模式(如sbus、CRSF等)需与飞控端口的接收机协议一致,若协议不匹配,即使端口已正确开启,飞控也无法识别来自接收机的信号,这也是新手最常遇到的问题之一。
2)通道参数说明:页面中显示的横滚(A)、俯仰(E)、方向(R)、油门(T)及AUX辅助通道数值,代表当前遥控器发出的脉冲宽度(单位:微秒)。

摇杆中位一致性:横滚、俯仰、方向三个通道的摇杆回中状态下的数值必须保持一致。若此数值不相同,飞行器将难以控制。可在进行遥控器摇杆校准后,使用遥控器上的微调按钮,将中位值统一调整为1500µs,或其他中位值(如1520µs)。
3)关键设置步骤:
失控保护:飞行前务必阅读相关文档,并正确配置失控保护。


基础配置:在“配置”页面设定接收机串口、模式及厂商。
接收机对频:在进行调参软件设置前,务必先完成接收机与遥控器的对频。
通道映射:设置为标准的AETR1234顺序。
闸值校准:摇杆低位阈值,观察横滚、俯仰、方向通道的最低杆量数值(例如1000µs),将此参数设置为略高于1000(如1050µs),若设置的数值低于实际最低值,将无法解锁电机。摇杆高位闸值,观察最高杆量数值(例如2000µs),将此参数设置为略低于摇杆高位阈值(如1950µs)。

死区设置:飞控调参时配置1-3µs的摇杆死区,以消除中立点附近的微小漂移。死区树脂越大,摇杆的的灵敏度越低,打杆的响应就显得迟滞。
4)注意事项:
摇杆中点:此数值(如1500µs)必须准确。若设置不当,飞行器的航向、俯仰、滚转将出现持续漂移,对飞行动作的操控将变得极其困难。
阈值设定与解锁:若将油门通道的阈值范围设置在观测到的实际杆量区间之外,或油门摇杆未置于最低位,扳动解锁开关时将听到报警提示,且电机无法解锁。
摇杆校准技巧:在遥控器设置菜单里对摇杆进行校准时,请将左、右摇杆以最大杆量缓慢绕圈拨动,以获取完整的摇杆行程范围。
第7节 遥控器的设置
遥控器参数的正确设置,是确保接收机正常工作的首要前提。无论使用何种型号的遥控器,都必须在其内部创建一个新的模型配置文件,并完成一系列关键参数设置。唯有如此,接收机才能成功与遥控器建立连接,并将指令准确无误地发送至飞控。
核心要点:深入理解并掌握遥控器的功能菜单设置,是航模新手必不可少的基础功课。对于遥控器应用基础知识较为薄弱的初学者,建议投入充足时间系统学习其各项设置的含义与作用。这不仅直接关系到飞行器调试的顺利程度,更是穿越机基础技能体系中的重要组成部分。
航模遥控器使用思路:了解按钮功能-建立模型配置-设置配置参数-接收机对频-模型调参-修改遥控参数-测试模型。
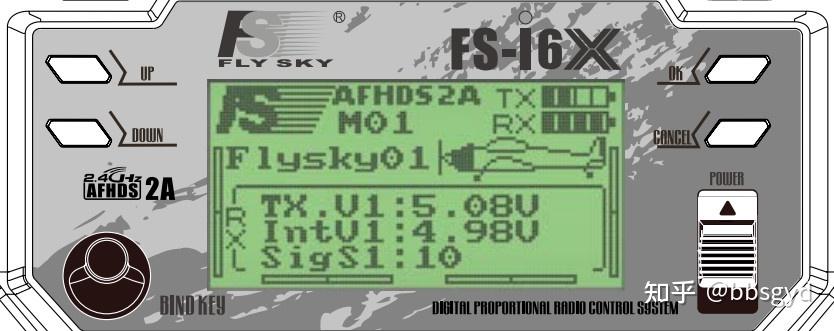
1)熟悉遥控器:学校航模社和自学者在入门阶段常使用富斯FS-i6(i6X)遥控器,它的设置菜单较为简单,面板上有四个开关按钮和两个VR模拟量电阻旋钮,遥控器具备6通道(10通道)输出,空中遥控半径大约为300米,使用4接5#电池。
POWER为电源开关;OK为确认(长按调出菜单、短按选定)。
CANCEL为保存或者返回(长按2秒保存设定、短按为返回)。
UP为向上;DOWN为向下。
2)接收机对频:BEND KEY对频是接收机对频按钮,按住该按钮后开启遥控器电源,遥控器进入对频模式,在屏显RX Binding..中等待需要对频握手的接收机信号,进入对频模式的接收机扫描到遥控器的握手信号,自动完成对频。如果接收机具备双向传输功能,握手成功后会给遥控器一个确认对频信号,遥控器返回待机界面;如果接收机不具备双向通信功能,对频握手成功后接收机进入待机模式,遥控器依旧停留在屏显RX Binding..中等待,需要关闭遥控器再次开启,对频完成。接收机指示灯快闪为对频模式,慢闪为非连机模式,常亮为联机模式。大部分富斯接收进入对频模式通常需要按压对频按钮再通电。
3)遥控器的模型设置:
遥控器开机后再长按OK键2秒后进入菜单MENU,里面就两个图标,一个SYSTEM“系统”,另一个SETUP“设置”。
遥控器system系统设定:

短按一下ok键,在system下需要设定的常用项有:
3-1)在Model select型号选择下,短按OK键进入选择型号Model 01,FS-i6X可存储20组不同的模型数据,长按CANCEL键2秒保存设定并自动退回上级菜单。
3-2)在Model name型号名称下,通过选择不同英文和数字,给01号型号起个名字方便记忆,最后长按CANCEL键2秒保存设定。
3-3)在Type select类型选择下四轴默认为Airplane or glider或者滑翔机。
3-4)在Model copy复制模型下,可通过复制已设置好的一组模型数据快速建立新的飞机模型,相同类型的飞机可以直接使用同一套模型参数。
3-5)在Model reset复位模型,复位模型数据,该模型参数需要重新设定。
3-6)在RX setup接收设置下,AFHDS 2A里使OFF变为ON,开2代协议模式;在PPM output输出下,使OFF变为ON,开启PPM输出模式;设为OFF时启用PWM模式接收机协议;在i-BUS Setup的IBUS设置下,设置为CH1,用1通道作为IBUS协议的信号传输通道,接收机通道1信号线连接到飞控的sbus接收机焊盘上。
3-7)在sticks mode摇杆模式下,选Mode2,这是左手油门美国手摇杆布局。
3-8)在Factory reset恢复出厂设置下,全部模型的参数和接收机设置将丢失。
其它项无需设置,如想了解其它未进行说明的项的功能,可另行学习关于遥控器菜单对应功能的相关资料,富斯遥控器官网地址https://www.flysky-cn.com/。
遥控器的STUP设置:
短按一下ok键,在SETUP下需要设置的项:
3-9)在Reverse通道翻转下,可以进行各通道反向设置,这里全部为NOR。
3-10)在Een points通道范围下,设置通道脉宽范围,通常无需更改,但如果是使用PWM协议外接舵机或者云台,需要调整参数的范围以适应外设控制起始角。
3-11)在Display显示下,可以观察到所有通道的实时杆量变化值图示,如果已经设定了AUX通道对应开关,这里拨动开关时可以看到它们的变化。重要提示:本界面如果长按CANCEL按钮2秒将进入通道杆量自检演示模式,所有的通道杆量将从中位向最高再向最低自动变化,如果此时飞机还是解锁状态,那就危险了!飞机会突然加大油门并螺旋飞高逃逸,无法控制,千万不要在飞机接通电源时开启通道自检,这个遥控器固件的设计,没有考虑到这个安全问题。请牢记,避免错误开启通道自检。
3-12)在Aux. channels辅助通道下,设置一个两档开关在5通道上,如5通道SWD开关,6通道SWC开关,7通道SWA开关,8通道SWB开关,9通道VRA旋钮,10通道VRB旋钮,设置完后常按CANCEL键2秒保存返回。5通道的SWD两挡开关将用在BF调参里给飞控解锁电机,6通道SWC三挡开关用于切换飞行模式,7、8、9、10通道可用于控制飞控的其它功能。
3-13)在Subtrim中立点微调,如果某个遥控器的中立点偏差太多,可以在这里调整它,让1/2/3/4通道的中立点达到同一数值。
3-14)在Dual rate/exp双率比例下,如果你不理解,请不要进行调整。
3-15)在Throttle Curve油门曲线下,它可以让油门行程中的摇杆量不按照平均比例变化,调节它可使油门量更早提升或降低,如果你不了解,请勿进行调整。
3-16)在Mix混控下,多旋翼飞机无需设置混控,默认值。
3-17)在Elevon升降副翼下,多旋翼飞机无需设置副翼,默认参数即可。
3-18)在V tail V形尾翼下,多旋翼飞机无需设置尾翼,默认参数即可。
3-19)在Switches assigns开关分配下,无需设置,默认参数即可。
3-20)在Throttle hole节流板下,多旋翼飞机无需设置,默认参数即可。
3-21)富斯FS-i6X修改可用通道数量,在英文菜单下进入SYSTEM 系统设置AUX SWITCHEN开关通道,在下方的CH处修改6为10,长按2秒面板上的CANCEL按钮保存设置。遥控器被默认只使用6个通道,可俺需要进行通道数的修改。
富斯FS-i6X遥控器的相关设置与注意事项已在前文详细说明。如需深入了解该遥控器或其他遥控器的更多功能,建议通过互联网查阅相关资料进行学习。对于OPEN TX、EDGE等开源系统遥控器,它们功能更为强大,设置选项也相应复杂,需要投入更多时间进行摸索和掌握。
遥控器应用技能是穿越机技术体系中的重要组成部分。尽管市面上不同品牌、不同价位的遥控器在发射功率、通信距离和可靠性上存在细微差异,但其核心功能基本一致。对于初学者而言,选择一款设计成熟、口碑良好的大品牌产品至关重要。这不仅能确保更高的可靠性和更合理的设计,也能避免在后续使用中陷入不必要的设置难题,从而将更多精力专注于飞行技巧本身。
无论最终选择哪款遥控器,都需要投入必要的时间去理解其各项设置的用途与对应影响,这是通往成功飞行的必经之路。
常见遥控器品牌有:富斯FLYSKY、天地飞、Spektrum、JR PROPO、乐迪(RadioLink)、华科尔(Walkera)、扶他把FUTABA、大疆DJI、睿思凯FrSky、Jumper、Radiomaster、Radiomaster Boxer、Zorro开等。
第8节 模式页面
1)飞控的姿态模式设置
先来了解一下调参软件中的几个常用模式范围设置及作用,再开始进行设置。
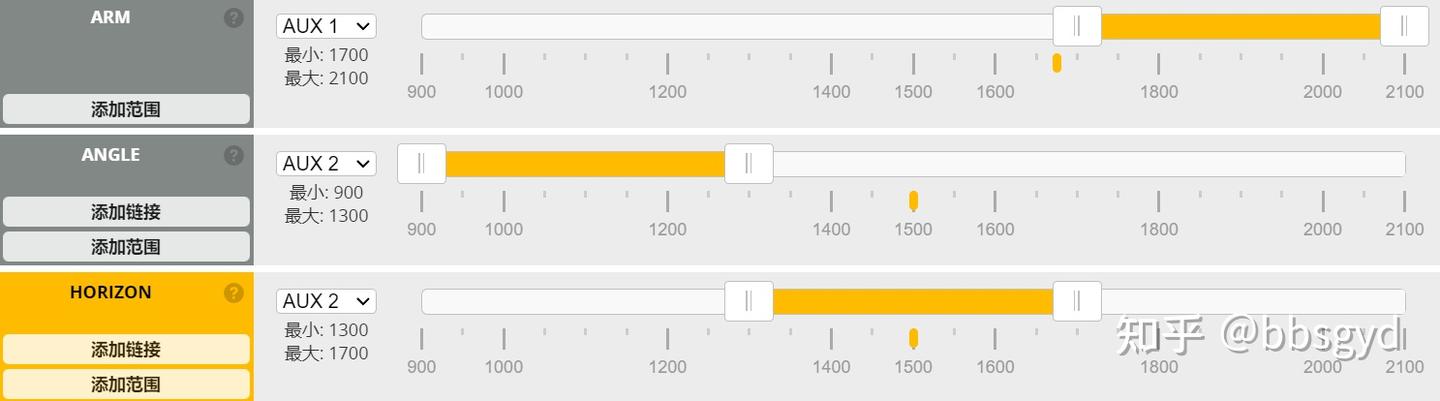
ARM电机解锁:用遥控器的档位开关使电机处于解锁、关闭状态。
ANGLE姿态自稳模式:感度较低且锁定了飞机倾斜角度,新手入门阶段常用。
HORIZONG姿态半自稳模式:姿态感度较高,在一定角度内,如小于30°时是ANGLE模式,在大于30°时是ACRO模式,这个界限也不是突变的,而是是渐变的,具体参数在PID Tuning Tab - Angle/Horizon - Angle Limit中设置角度值,此模式下可以做姿态自稳飞行,也可以做翻滚动作,右摇杆回中后飞机姿态会恢复到水平悬停位置,翻滚操控的难度低,对新手比较友好,但刚开始使用时容易出现摔机事故。
Manual mode按比例角度模式(全手动),在模式设置界面没有出现相关按钮,当设定的三挡AUX开关脉冲落在非ANGLE和HORIZONG模式范围时,就是全手动模式了。如果不设置ANGLE和HORIZONG模式范围,飞机通电就进入按比例角度模式,该模式下飞机处于无水平自稳状态,任何俯仰与滚转角度的改变,如需要再次回到水平姿态上,就需要往相反方向打一些杆量,可能需要经过几次小幅度的来回修正后,飞机姿态才能回到水平状态,新手必炸,谨慎使用。建议新手先练习自稳操控,娴熟后再尝试练习全手动模式。
2)模式设置页面:设置ARM解锁、ANGLE自稳、HORIZON半自稳飞行模式开关。
黄色区间为开关档位处于有效状态,灰色区域为无效区域,拨动遥控器的通道对应开关,拖动滑动条到档位开关限定区域,其他功能模式开关设置往下看。
3)其他功能模式开关设置:
HEADFREE机头转向任何方位,都以开启时的机头方向为准,也称为无头模式。
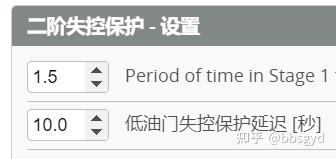
FAILSAFE手动触发失控保护,设置一个开关,当触发时执行失控保护设定动作。
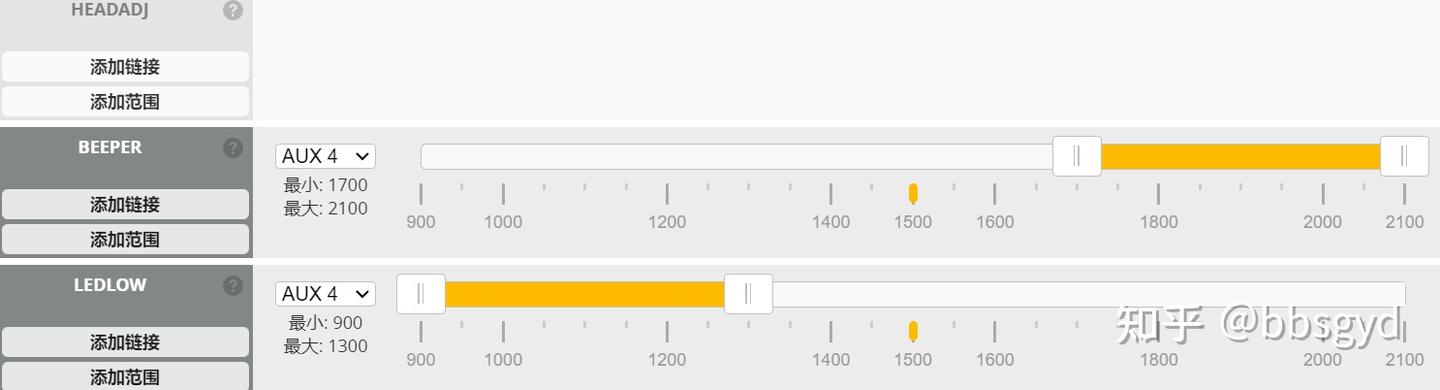
HEADADJ重新指定无头模式的方向,建议不使用在FPV飞行中,会炸机。
BEEPER蜂鸣器,设置一个开关,当需要找飞机时开启,告警器会发出声音。
LEDLOW 关闭所有LED外置灯带。
OSD SW OSD开关,通过一个开关,显示或者关闭OSD画面中叠加的文字。
BLACKBOX飞行记录仪(黑匣子),如不设置,飞机解锁就一直记录飞行数据。
AIR MODE空中模式,油门收到底电机不停转,就是在空中0油门PID依旧工作,飞机仍可控制,增加了飞机的滞空能力,尤其是做翻滚动作时,实际效果就象失去了重力犹如漂浮在空中一样,可以叠加到手动,自稳、半自稳任何一种飞行模式上;开启这个模式后,飞机降落时触地会出现反弹,需在触地前0.5秒及时锁闭电机。
FPV ANGLE MIX FPV视角混合,打偏航时补偿横滚,通常不开。
Blackbox Erase黑匣子擦除,记录仪的存储容量只能记录几分钟的飞行数据,数据满后不工作;可设一个AUX通道,定义一个两档开关,开关拨动到有效区域一次即擦除飞行记录仪内容,以便重新开始记录。


Camera control1摄像机控制器1,用旋钮或开关来控制摄像头拍摄启停。
Prearm预解锁,电机解锁保险开关,先开启它才能开启解锁,电机解锁双保险。
VTX PIT MODE图传小功率模式,飞控与图传板需要连一条数据线控制功率值。
Paralyze瘫痪模式,很实用一个功能,开启它炸机后飞机无法再解锁电机,避免误伤,飞控需要断电重启后才能恢复到正常状态。
ACRO TRAINER角度限制模式,通常会限制在一个安全的角度值,新手练习时使用。
FLIP OVER AFTER CRASH突然翻转,反乌龟模式,电机向相反的方向转动,需要双向电调支持才可以使用,炸机不用捡,竞赛时建议开启。
其他飞控固件可能用到的功能模式设置说明:
GPS RESCUE GPS救援模式,启用后当拨下开关,启动GPS救援模式。
TELEMETRY打开或关闭回传数据(也称为遥测数据)。
RATE模式 入门练习阶段使用的模式。
LAUNCH CONTROL一键弹射起步,油门在超过阈值时飞机弹射起飞。
ANTI-GRAVITY控制反重力功能的开关,这是一种飞行PID机制:油门值快速变化时,自动调整P I 值以增加姿态稳定性。反重力功能默认自动启用,用该功能需要在Configuration中配置后才会在ModeTab里出现。
第9节 PID参数设置
1)连接与数据组:PID页面可以设置4组不同的数据,方便外场飞行时切换使用不同的参数。外场变更飞行参数可以使用笔记本电脑、手机、遥控器摇杆组合调参几种方式,手机调参需要飞控板集成蓝牙无线收发器,或者通过飞控外设接口接入一个蓝牙设备,使用手机OTG转接头也可以通过数据线连接到飞控进行调参。
PID设置的上面两行一个是横滚ROLL,一个是俯仰PITCH,也就是x、y轴,第三行是YAW是Z航向轴。预设的PID参数需要依照飞机的轴距大小、电机参数、电调参数、电池参数、飞机起飞重量、螺旋桨参数来综合考虑。

2)PID简述(以Betaflight的PID控制器为例):
P 理解为直接修正飞行动作与预期的作用力。
I 是在P和D无法继续修正持续存在的动作偏差的时候(系统达到稳态时),继续将飞行动作修正至预期的力(修正之惯性)。
D 则是对抗一切飞行动作变化趋势的阻力(对于Betaflight固件而言,D是Damping而不是Derivative,增大D就是增大阻力)。
**上述“飞行动作”指的是穿越机的姿态变化的角速度,而不是姿态本身**
第10节 滤波器参数的设置
- 陀螺仪滤波:独立于PID配置文件的滤波器设置。
在穿越机飞行控制系统中,陀螺仪滤波器的核心作用是通过区分有效运动信号与干扰噪声,确保姿态控制的稳定性与响应速度。

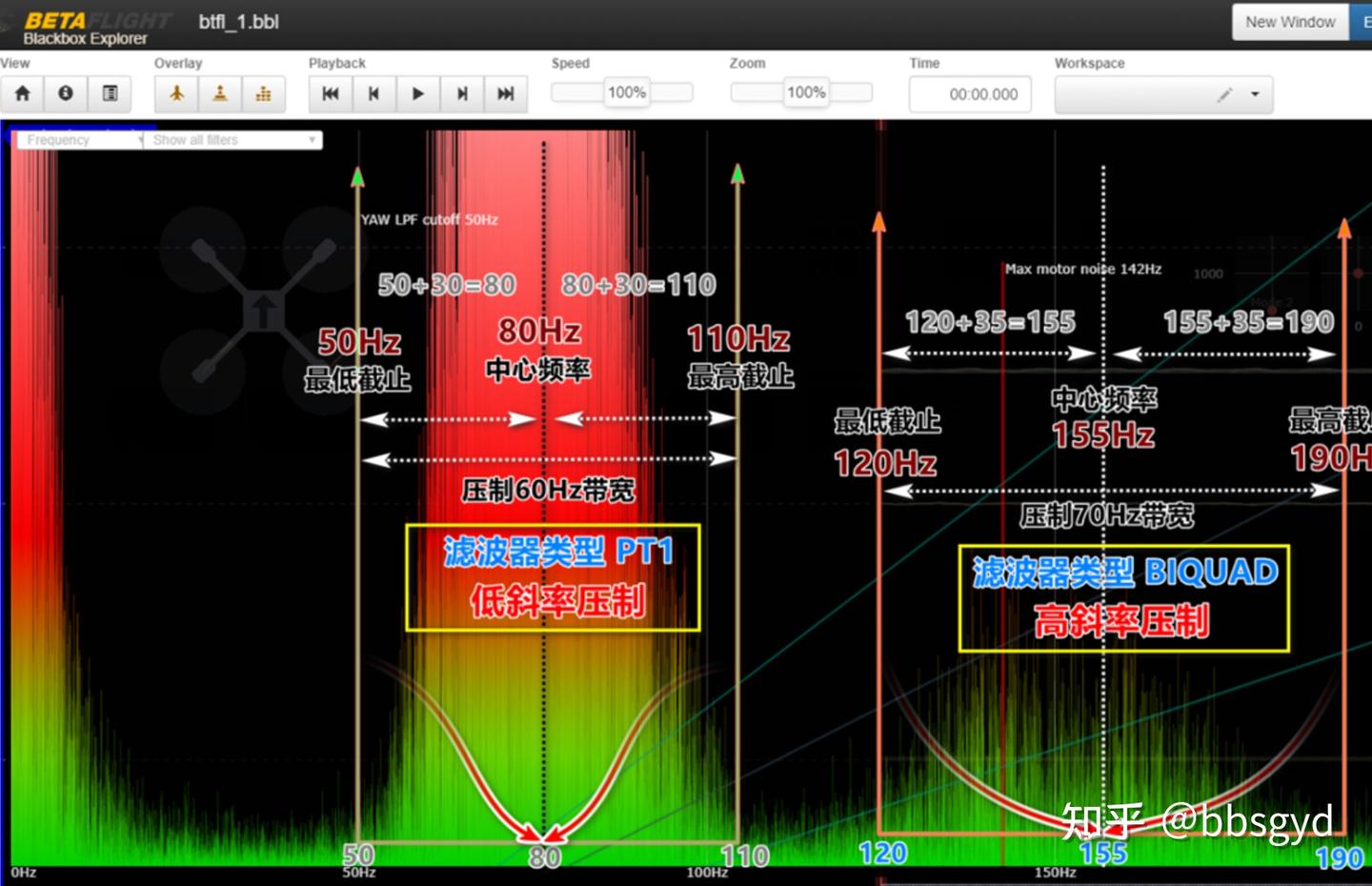
其中,低通滤波器(Gyro Low-pass Filter)和陷波滤波器(Notch Filter)是两类关键工具。
2)低通滤波器的作用
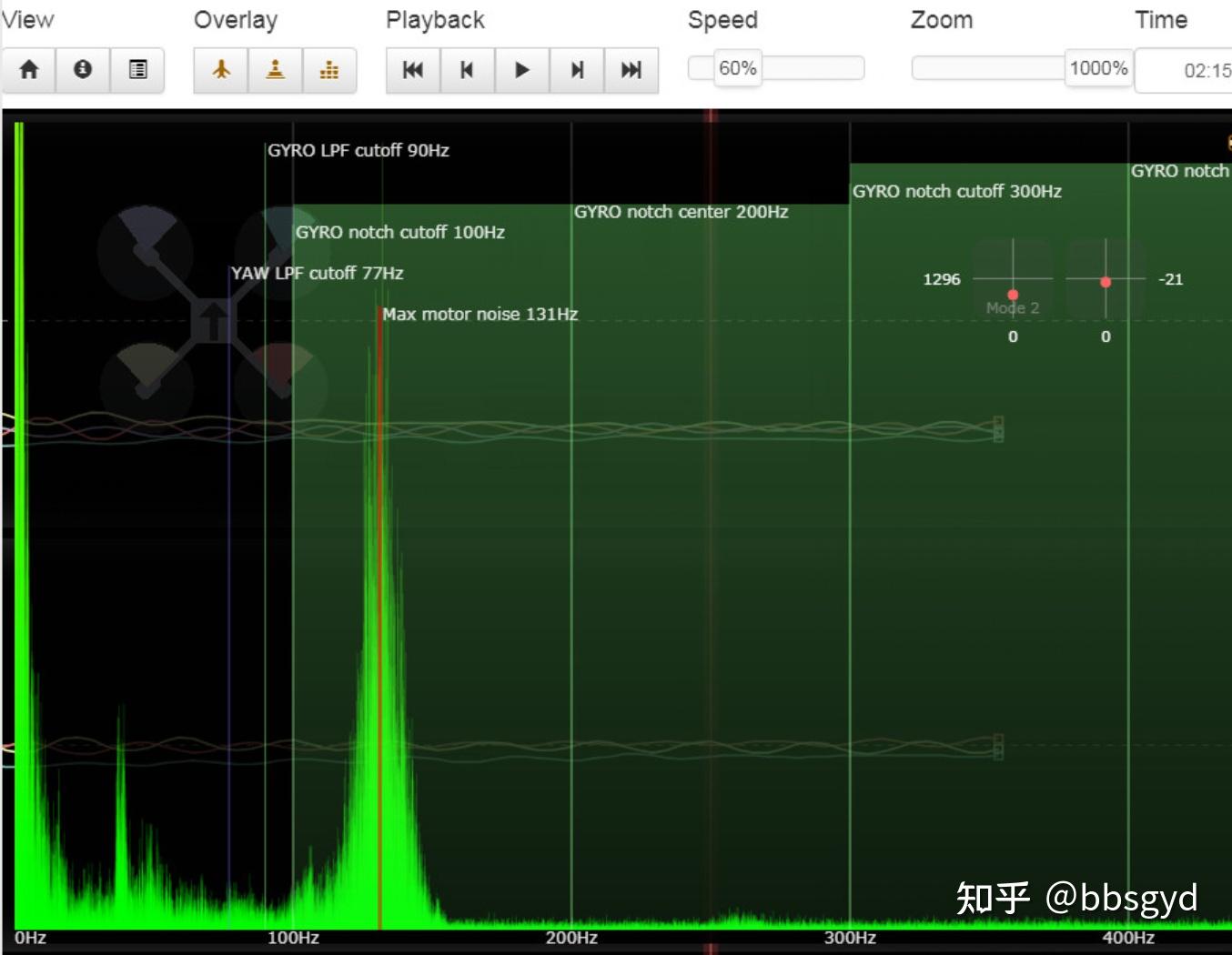
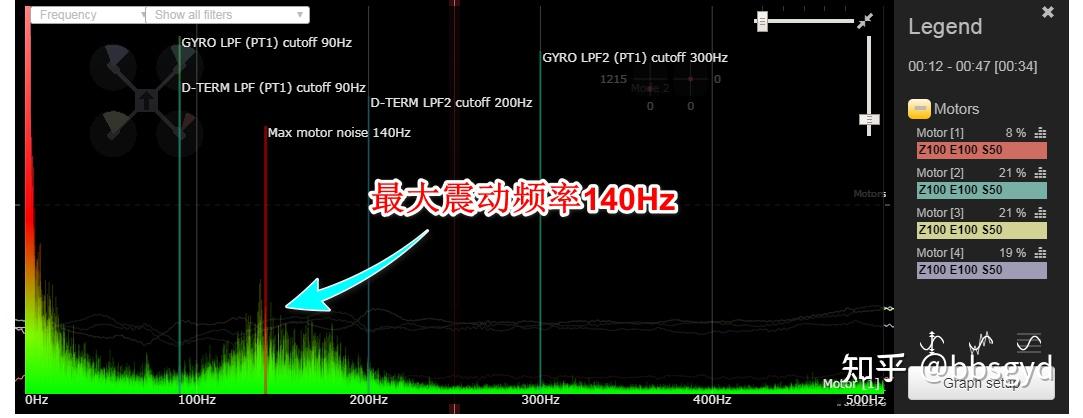
低通滤波器通过设定截止频率,允许低于该频率的信号(如飞行器的正常姿态变化)通过,同时衰减高于该频率的振动噪声(如电机高频振动)。例如,在五寸机中,典型机架随机振动频率多集中在150Hz-500Hz区间,开启低通滤波器对这一区间振动的过滤,可有效抑制这一频段的噪声,避免采集到干扰PID控制器计算的振动。但需注意,截止频率设置过低会导致信号相位延迟增加,降低飞行响应的实时性。
3)陷波滤波器的作用
陷波滤波器针对特定频率的噪声进行精准消除(压制),常用于解决机架共振或电机振动引起的周期性干扰。例如,若通过Betaflight Blackbox Explorer分析发现日志中存在200Hz的振动峰值(可能由机架结构共振导致),可针对性地设置陷波滤波器抑制该频率。这种滤波方式相比低通滤波器,能缩小需要处理的信号带宽,因此能保留更多有效运动信息,减少最终执行延迟。
4)RPM滤波器的作用
动态噪声跟踪实时计算:基于电机实际转速(通过双向Dshot协议回传的RPM数据),动态设置陷波滤波器。例如,若电机实时转速对应的基频为150Hz,RPM滤波器会自动在150Hz、300Hz、450Hz等谐波位置设置陷波点。
减少手动配置:传统陷波滤波器需手动设定固定频率,而RPM滤波器通过算法自动适应不同油门下的转速变化,避免因转速波动导致的滤波失效。
降低系统延迟:陷波滤波器只影响滤波带宽附近信号的延迟,对其他频率的信号延迟理论上无影响。
5)D-term滤波:
与PID配置文件相关联的滤波设置。
D-term滤波的核心目标是抑制噪声并提升控制精度。
5-1)D-term低通滤波器:用于过滤高频噪声(如传感器噪声或机械振动),必须开启的基础滤波器。
原理:通过设定截止频率,允许低频信号通过,同时衰减高频噪声。过少的滤波会放大噪声(尤其在高频段),导致电机过热甚至损坏;而过多的滤波会增加延迟,影响动态响应。
5-2)D-term陷波滤波器:针对特定频率的共振(如机架振动或桨叶弯曲)进行抑制,防止噪声被放大。
原理:通过设定中心频率和Q值(带宽),在特定频率段形成深度衰减。动态陷波滤波器可自动适应变化的共振频率,而静态陷波滤波器需手动设置已知共振频率。
设置建议:大部分情况下不需要开启。如需开启,注意Q值过高可能导致未过滤噪声增加,需平衡噪声控制与带宽(例如Q=450比Q=700更稳定)。
5-3)D Term滤波器设置:
D Term低通滤波器必须开启。
即使经过陀螺仪滤波,传入PID控制器中的姿态角速度信号仍然会包含高频噪声,而D Term运算则会放大这些高频噪声,导致电机严重发热甚至烧毁。
D term低通1截止频率通常也设置为75-150Hz(动态),飞机的机架很烂时,陀螺仪低通滤波器1的频率可以设置更低一些60-120Hz,这一项通常在调试时是一定要打开和设置的。
对于噪声水平优秀的机架,可以酌情增加D term 滤波的截止频率范围,以大幅增加穿越机的响应速度,减少洗桨。好的5寸穿越机甚至可以增加到125-150Hz。
D term陷波滤波器中心频率,需要根据飞行数据记录仪里的试飞数据来确定,依据震动频率精准设置,如果没有飞行记录数据作为依据,就不需要开启。
6)偏航低通滤波器
偏航低通滤波的启用是可选的。默认中心频率设置为100Hz,这里的参数对飞行影响不大。
作用:减少偏航方向的噪声干扰,尤其在碰撞或复杂气流中。
原理:默认截止频率(如100Hz)可最小化延迟,同时抑制不必要的高频噪声。
设置建议:通常无需修改,但若存在明显偏航抖动,可适当调整频率以优化响应
PID循环更新频率通常为陀螺仪更新频率的1/2至1/1,5寸竞速机陀螺仪采样率通常设为4-8kHz。5寸竞速PID循环更新频率通常设为8kHz,这样会增加运算处理器的负荷,高PID循环更新频率需要更高频率的处理器器配合,如F722或者H743单片机处理器。
**滤波器的正确设置是PID调参的基础。**
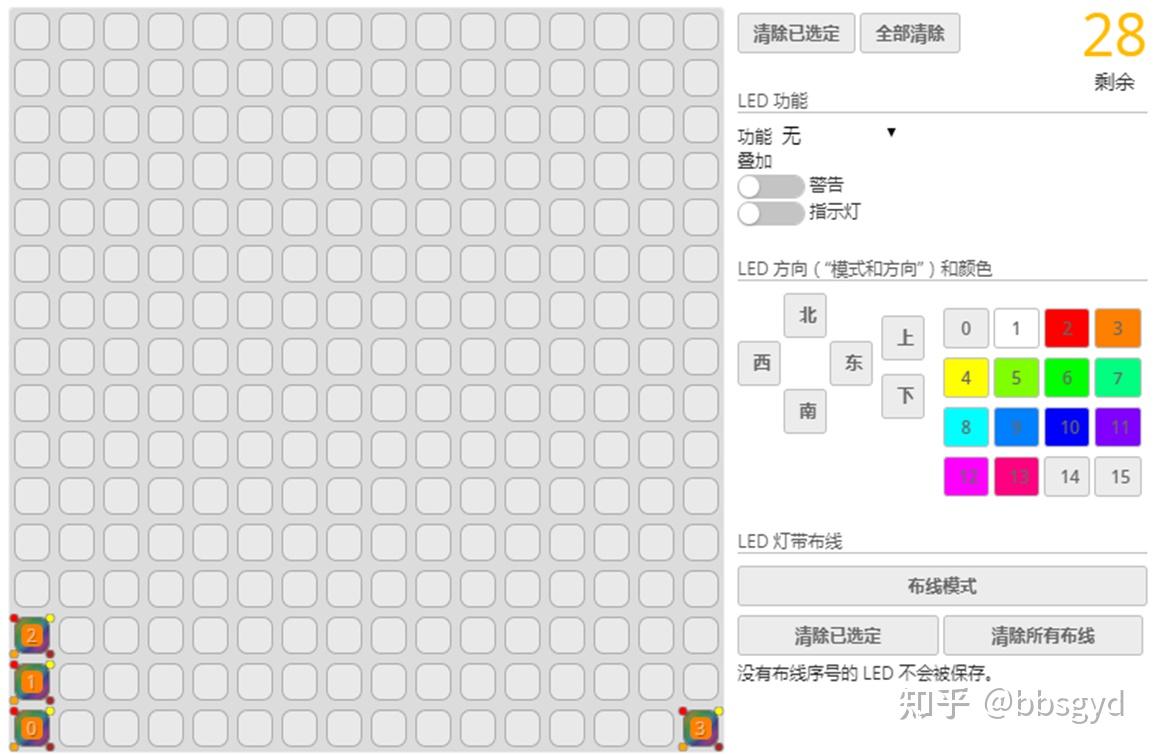
第11节 LED灯带的设置
在BF调参软件的 “配置-其他功能”界面设置LED_strip,彩色RGB LED灯带开启,再到图形编程界面设置灯珠。图形编程界面使用布线模式来设置LED灯颜色和开启,设置逻辑为选择需要定义的灯珠坐标,并对灯珠的颜色、频闪进行设置。编程界面能设定灯珠功能、叠加功能,设置遥控方向、灯珠颜色,取消布线模式,保存。
部分灯带的控制有所不同,具体操作请自行琢磨并进行设置练习。在竞赛中,一般都会规定设置机载LED灯带,并显示一种固定的颜色,以示区别。所以,每个飞手都应当能够快速而正确地设置飞机的LED灯带颜色。
也可在调参软件的CLI命令行页面输入LED的指令,保存重启后生效。
BF固件的LED尾灯参考命令行(BF固件通用)
# led
led 0 0,15::CTONIW:3
led 1 0,14::CTONIW:3
led 2 0,13::CTONIW:3
led 3 15,15::CTONIW:3
Save
最后输入的Save是保存的意思,输入完指令行后按键盘回车键进行保存确认,命令被写入飞控的EEPROM,飞控自动重启后修改的功能生效。
第12节 电机设置
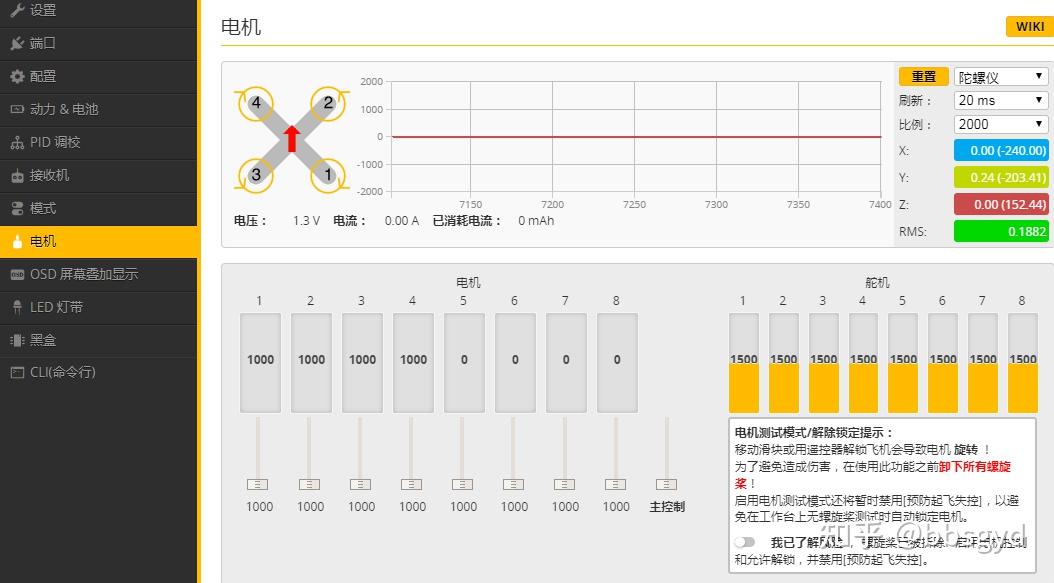
在电机页面,可以看到一个流动的波形状态数据窗口,这是陀螺仪传感器的监视窗口,晃动飞机时,这些数据会随即产生变化,刷新间隔一般为20ms,比例2000。
电机页面可以用来测试电机转动方向和飞控的电调控制通道是否对应;在RPM滤波功能正确开启时,也可以用来观察电机的旋转速度RPM(转速/分钟)。使用电机界面测试电机前请卸下螺旋桨,以免发生重大意外事故!!!
使用本页面时,飞机需要接上电池,支持DSHOT协议的数字电调不需要做电调油门校准,只需要测试好每个编号的电机旋转方向是否正确即可。
PWM协议的电调需要在这里做电调的油门行程校准,就是定义电调最小输出至最大输出之间的行程;主控制滑块从0至100,相当于遥控器油门摇杆的0至100的杆量脉宽。PWM协议电调如不进行电调油门行程校准,是无法正常使用的。
PWM协议电调油门行程校准:飞机不接电池,用USB线把飞控接入电脑进入BF调参软件的电机页面,点开“我已了解风险”开关。
把“总控制”拉到最高,此时给飞机接上电池。听到电机播放音调逐渐上升的分解和弦或者琶音两次以上时,快速将“总控制”拉到最低。
听到电机播放音调逐渐下降的分解和弦或者琶音时两次以上后,关闭“我已了解风险”开关。断开电池,电调行程调校步骤完成,再次给飞机接上电池,测试电机旋转。
校准时电调发出的短促提示音1声、2声、3声为进入选取电机进角,一般选1声或者2声,听到相应响声后立即拉下总控制滑动条到最低即可。电机进角值设置不同,电机力度反应不同,这在尺寸较大的电机上反映明显,穿越机电机上反映不是太明显,这可以通过电机加减速时的磁力切割振动声音来感知。
第13节 OSD屏幕叠加显示
模拟图传OSD字符叠加是由一个独立的芯片MAX7456完成的,穿越机飞控通常都集成了该单元。
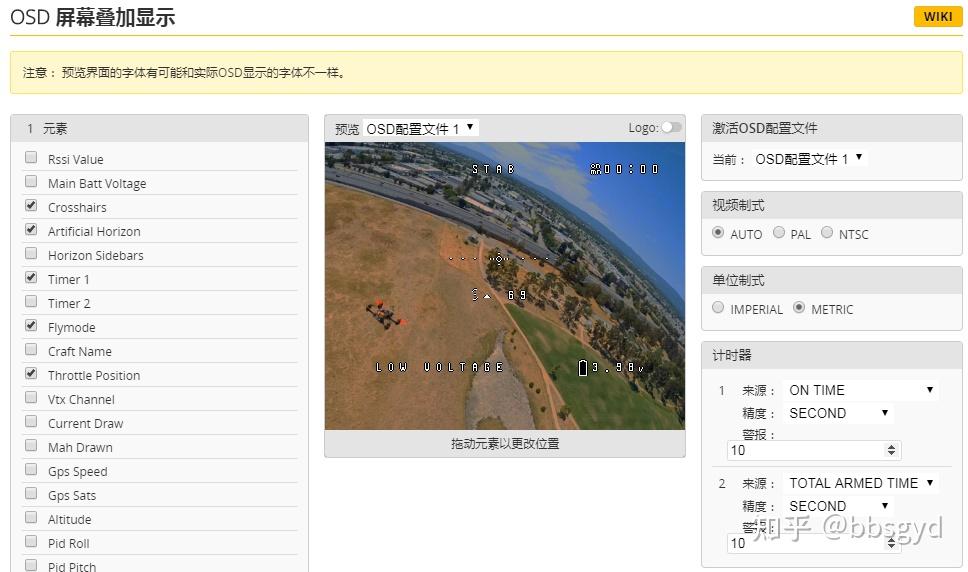
OSD将摄像头拍摄的图像,叠加上飞控的飞行相关数据字符水印,再输出给图传发射机进行编码发送,地面图传接收机收到的图像,上面会附着那些被叠加的字符,使操控者可以即时获取飞机的飞行数据。
OSD需要设置的选项有单芯电压、电池低电压告警、油门值、飞行时间、飞行模式、地平线这些数据,设置太多屏幕显得杂乱,FPV飞行时不好看画面。如果飞控启用了遥控器调参设置,在电机锁闭时可用遥控器对飞控进行飞行参数调整,一般是由摇杆组合进入调整模式,调整时图传画面上会叠加调参相关字符,使调参状态可视化。
数字图传OSD使用UART和MSP+Displayport协议,将飞控的飞行信息与图像编码数据以Canvas的形式一并发送至数字图传眼镜,并由后者完成渲染。
所以,数字图传OSD功能需要在端口页面中打开对应都端口的MSP协议,并将外设一栏设置为VTX(MSP+Displayport)。
第14节 黑匣子设置
无SD卡槽的穿越机飞控通常会自带的一个16MB的存储器,可以存储几分钟的高采样率飞行数据。


如果需要大容量的记录器,可以通过飞控外接端口安装外置黑匣子OpenLager,并使用容量不大于8G的TF存储卡来进行飞行数据的记录,存储卡格式化为FAT或者FAT32格式,不能使用MacOS进行格式化或者创建卷宗。
有些飞控带有TF卡槽,可以插入8GB以下的存储卡,如果未插入存储卡,板载SD卡会显示存储器不可用提示。
一切涉及TF卡的黑匣子记录方案,都无法通过地面站或者OSD菜单完成清空操作。若要执行黑匣子存储器的格式化操作,必须激活飞控的大容量存储设备模式,才能将TF卡格式化,切忌使用MacOS操作系统对TF卡磁盘进行格式化。
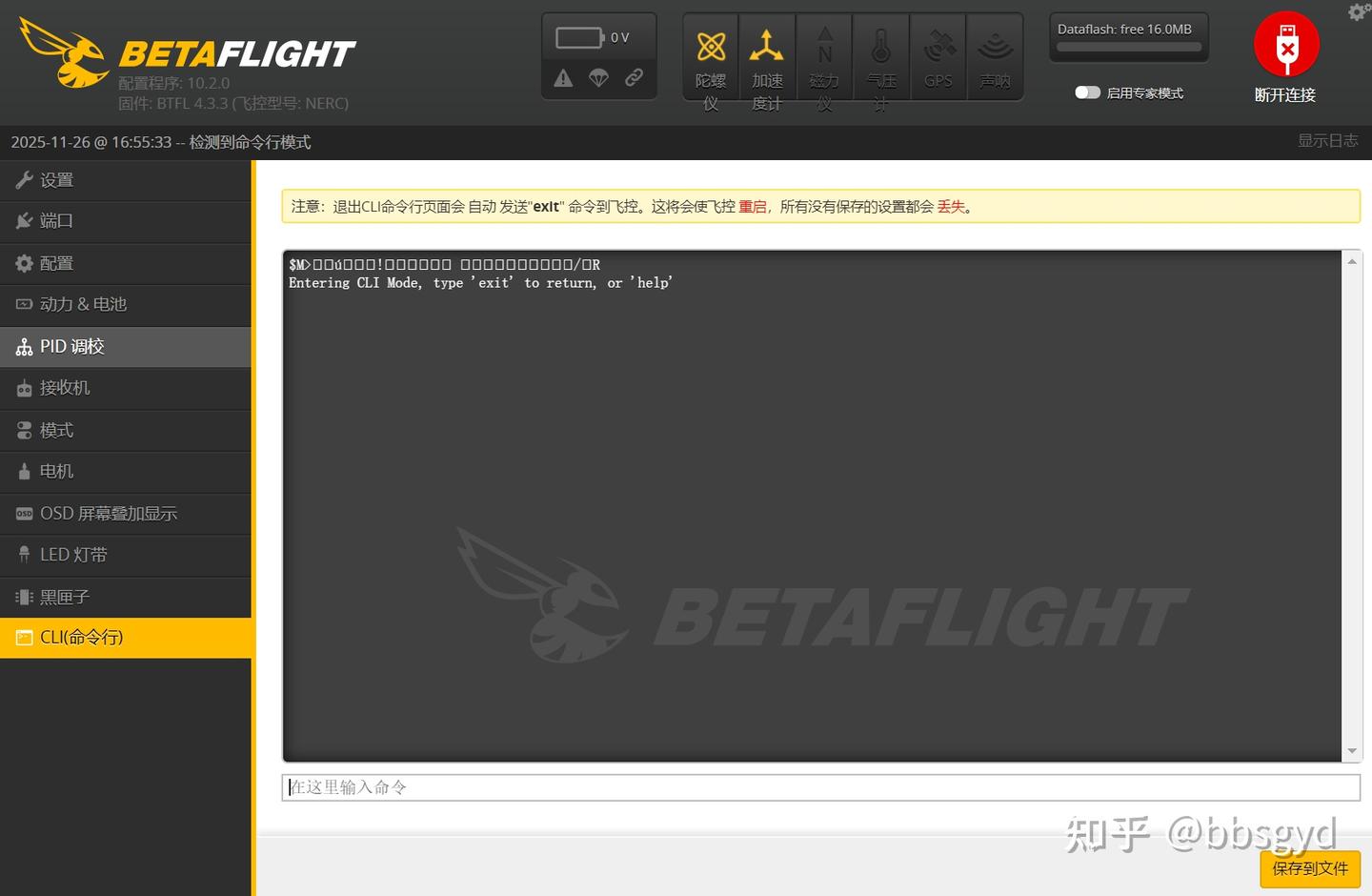
第15节 CLI命令行的使用
BF调参除了使用图形界面的选项来修改飞控参数外,还可以使用命令行来设置参数,这就需要使用CLI命令行窗口来输入配置命令行。
进入CLI命令行窗口后,如果要返回到其他的设置页面,飞控会重启。所以,在输入了许多命令行后,需要输入SAVE并按键盘的回车键,让飞控保存输入并自动重启,否则将不会保存修改的内容。许多常用的命令格式和参数,可在官网下载有关文档,CLI命令行在不同的固件版本中有所不同。
使用DUMP命令可以在窗口中显示飞控固件的当前所有配置的参数,便于硬件相同的整机参数迁移。将显示的内容保存到一个文本文件中备份以备不时之需。
而DIFF命令可以只将飞控中被改动过的参数进行备份,这个备份方式更加灵活,并且可以将参数在不同飞控之间迁移。
命令行可以用来设置端口开闭、指定中断、定义单片机的输入输出I/O针脚,配置LED灯带、BB响、接收机类型、PID参数、滤波器、电调电机参数等,可根据调测需要使用符合飞行要求的命令行和参数进行设置。
穿越机飞手需要熟悉CLI命令行的使用,对常用的命令需要随手就来,对输入的命令行,也需要明白它的作用,了解它对飞行带来的影响,这是一个常用的飞控参数配置工具。比如花飞机型可以尝试输入set rc_smoothing_type = FILTER回车,再输入SAVE保存,此命令行的功能是激活遥控器输入信号滤波器;作用为削除遥控器突然打杆带来的尖峰信号,让电机没那么热。在前面设置LED灯带时使用的参数设置命令,就是在CLI命令行窗口里进行的。如果你曾经对黑洞洞的命令行窗口心生畏惧,现在你需要勇敢去面对它,你只要开始学习就能慢慢用起来。
飞行操控技能提升是所有努力合围的最终目标,也是穿越机学习的意义所在。学习穿越机技术,平时要多去进行飞行操控技巧的练习。磨刀不误砍柴工,飞行操控也还是从理论开始学习,不断去练习掌握,熟能生巧不断提高。飞行平台的硬件组装和飞控调试相关的基础内容,无论是理论还是实践,都需要许多时间去完成,在日积夜累中不断在这个方向上给自己添砖加瓦,时间会见证你的进步。
第五章 多旋翼穿越机飞控固件升级与输入输出I/O配置
第1节 认识飞控软件
1)飞控软件
就是我们常说的固件,它是飞控固定不变的操作系统软件,它负责分配和管理飞控的硬件资源。通过运行内置的系统软件,利用程序和算法,处理陀螺仪采样的姿态角速度数据和遥控器控制信号,输出指令让飞机按遥控器指令做动作。
固件被写入飞控单片机内置的存储器里,软件的功能不可被更改,不允许删除或者添加新应用功能,系统软件就这么固定不变,所以称其为固件。
2)刷新固件(烧写)
刷新固件就是给飞控重新安装一个更加新的或者更旧版本(更合适)的系统软件;固件擦除就是清除闪存中原有的飞控系统软件;烧写就是擦除并写入新的飞控系统软件。飞控固件通常如Betaflight_4.3.1MNIBUSF4SD.hex文件,固件文件后缀名为.hex,它被存储到单片机存储器内并会被单片机去执行; *.hex文件由软件编译器如C语言程序或者汇编程序编译生成,它是一个16进制的ASCII编码文本文件,也称为机器码,也可用ultraedit、WinHex等工具软件打开编辑。通常hex文件大小有几KB到几百KB甚至几十MB,穿越机飞控固件的大小通常为几十KB到几MB。
第2节 飞控固件的刷新
1)DFU驱动安装:要对飞控进行固件刷新,需要安装固件刷新模式端口驱动,并让飞控启动时进入刷新模式,BF软件才能连接飞控的DFU端口进行固件操作。首先要下载zadig-2.5.exe驱动文件进行安装,这是飞控端口专用的刷新模式驱动。
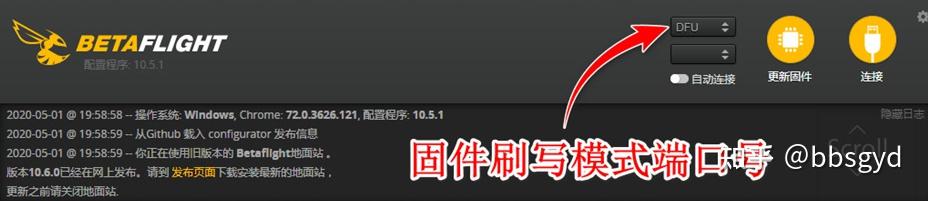
2)连接与刷新:当飞控正常连接Betaflight Configurator地面站后需要对主控单片机型号进行识别,在烧写固件页面,选择自动检测当前飞控的型号。再选择固件版本并从网络加载固件。固件下载完成会自动进行烧写、校验文件完整性、重启飞控,固件更新完成。
重点提示:在写入新的固件前,需要进入CLI窗口中使用DUMP查看配置行命令,对原有的I/O配置进行备份,如果刷新固件后导致飞控外设不可用,可用备份文本恢复基本输入输出参数配置,恢复飞控的使用。

如果因为某些原因,飞控无法自主进入DFU模式,则需要按住飞控的boot按键,再插入usb线连接飞控,进入刷新界面,打开“无重启序列”开关,手动选择飞控板对应的固件写入飞控即可,手动指定固件需要提前下载。飞控对应的固件名称可以在飞控说明书中找到或者询问生产厂家,正常工作的飞控在固件更新前可以使用CLI命令行输入DUMP查看飞控的具体产商代码和型号信息,并保存这些配置文本。
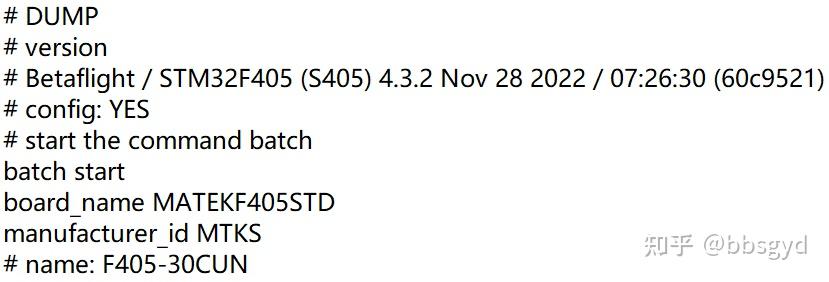
飞控信息解读:Version版本、Betaflight固件类型、STM32F405(S405)4.3.2单片机型号和固件版本、NOV 28 2022固件发布日期、boar_name MATEKF405STD飞控板型号名称、manufacturer_id MTKS生产商代码、name F405-30CUN自定义飞机名称。
如需更详细的操作引导,可参考Betaflight Configurator使用的完整文档。
第3节 电调固件刷新与设置
1)认识电调固件
常见电调固件依照电调板上的单片机型号不同,分为8位、32位两种。
8位电调固件:BLheli_S,JazzMavrick,BlueJay。
32位电调固件:BLheli 32,AM32, APD(Advanced Power Driver)等。
固件越新越好,越新的固件可适配越多类型的电机。8位电调出厂时大多数会刷入一个BLHeli_S固件,一般为16.7版本,如果需要开启飞控的RPM滤波器功能,必须升级至支持DSHOT双向通信的电调固件如BlueJay,才能使用RPM滤波器。
而大部分32位的电调固件原生支持双向Dshot,可以直接开启RPM滤波器。值得注意的是,BLheli 32电调团队因为地缘政治和俄乌战争的因素已经散伙,并停止更新和主控授权,新的BL32固件本质上是测试版,无法升级,稳定性没有保障。
现在,AM32固件将成为32位电调的主流固件;然而,AM32仍然处于一种早期开发的过程中,需要积极更新最新版本,才能获得更好的飞行性能和体验。
AM32固件是开源免费的,但是其作者坦言无法全职投入到AM32固件的开发中,厂商给的赞助费用,不足以覆盖他当前工作的收入,他还有一个家庭要养。
2)下载电调固件与烧写软件
对于BLheli_S电调而言,最方便的方式是在ESC_Configurator的WEB配置网页https://esc-configurator.com/进行在线刷写,相关的教程可以参考破风小课堂BlueJay刷写。
对于BL32电调而言,由于团队跑路,目前所有的BL32电调均无法更新固件。
对于AM32电调而言,固件刷写也可以在网页中完成,在线调参地址am32.ca如果无法访问需要下载离线调参软件。

需要下载其他电调调参软件,可以查看以下的链接。
https://pan.baidu.com/s/1Xnu2uVtOiqhyJto1OTiM5A?pwd=wkh1 提取wkh1。
https://pan.baidu.com/s/1s6nk2acbKTWy947-2yUHMA提取码bswh
https://pan.baidu.com/s/1sueN7gMP5CcSXLqrL_9OPw?pwd=2pw2 提取码: 2pw2
bluejay固件下载https://github.com/bird-sanctuary/bluejay/releases,固件对应的调参软件是JESC-Configurator。
AM32固件下载https://github.com/am32-firmware/AM32/releases,固件对应的调参软件是esc-configurator。
BLheli_S固件下载https://pan.baidu.com/s/1lR3ChnRWpGlY18AXQtRsDw?pwd=psq8 提取码: psq8,固件对应参软件是BLHeliSuite16.7.14.9 。
3)以BLHeli固件设置为例
大多数电调升级固件无需单独接线,可利USB线连接飞控,通过飞控与电调连接线进行数据传输,这种连接方式称为飞控透传 FC Passtrough。
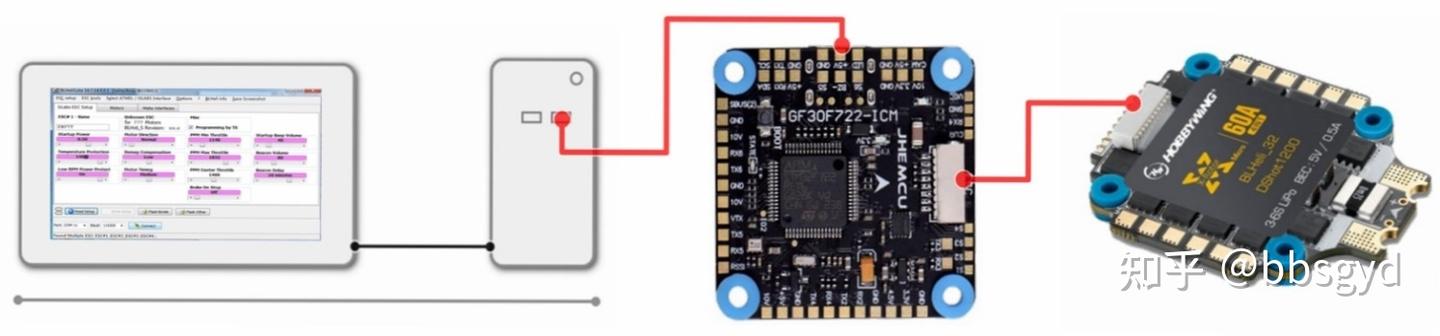
使用电调软件时,为避免COM通信口资源被占用导致无法连接电调,此时不能用BF调参软件连接飞控,请关闭飞控调参软件。
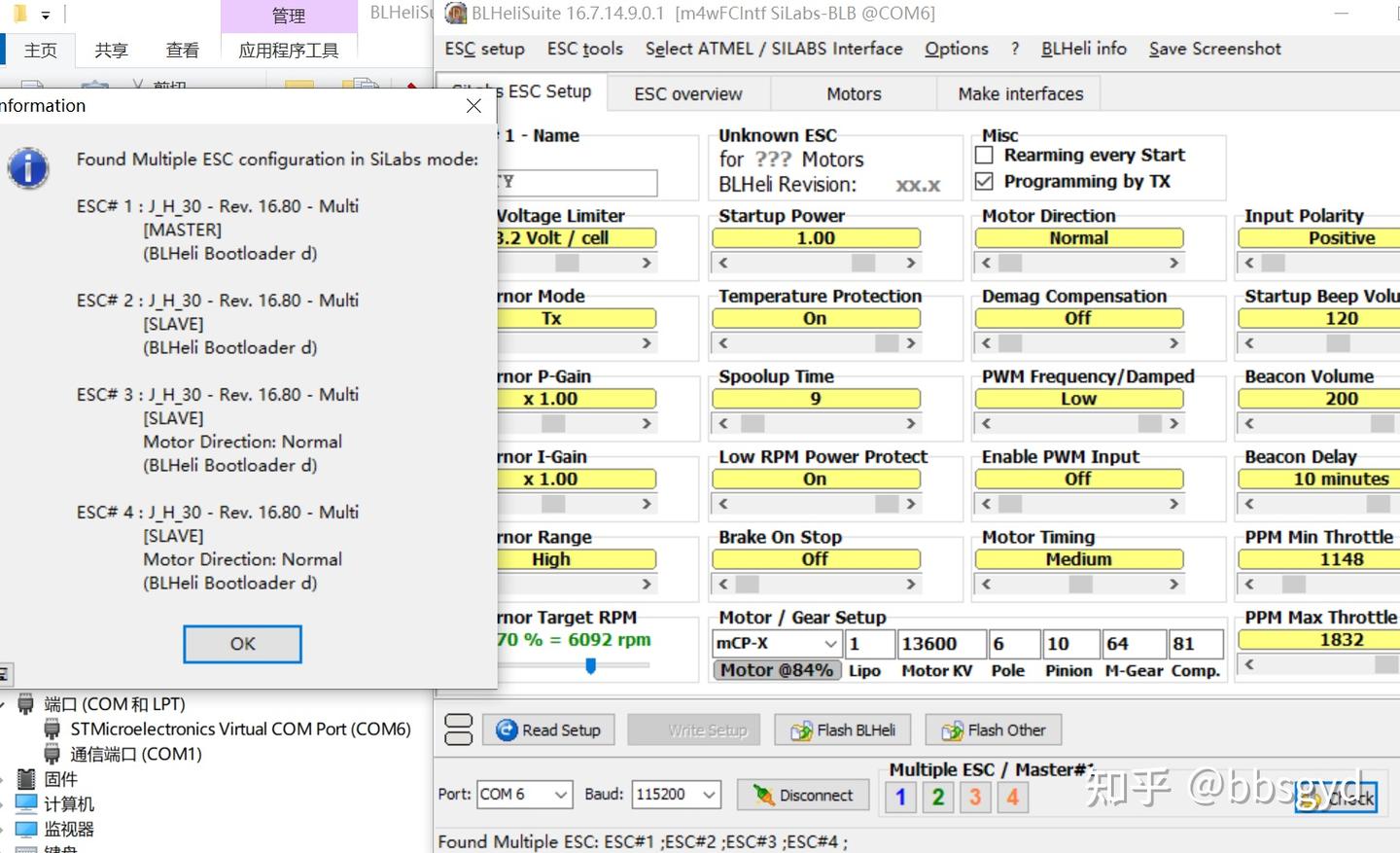
3-1)启动电调软件:给飞机接上动力电池,选择飞控的COM端口,使用115200波特率,点击Connect连接电调,MultipleECS/Master#1下的四个框参数为空。
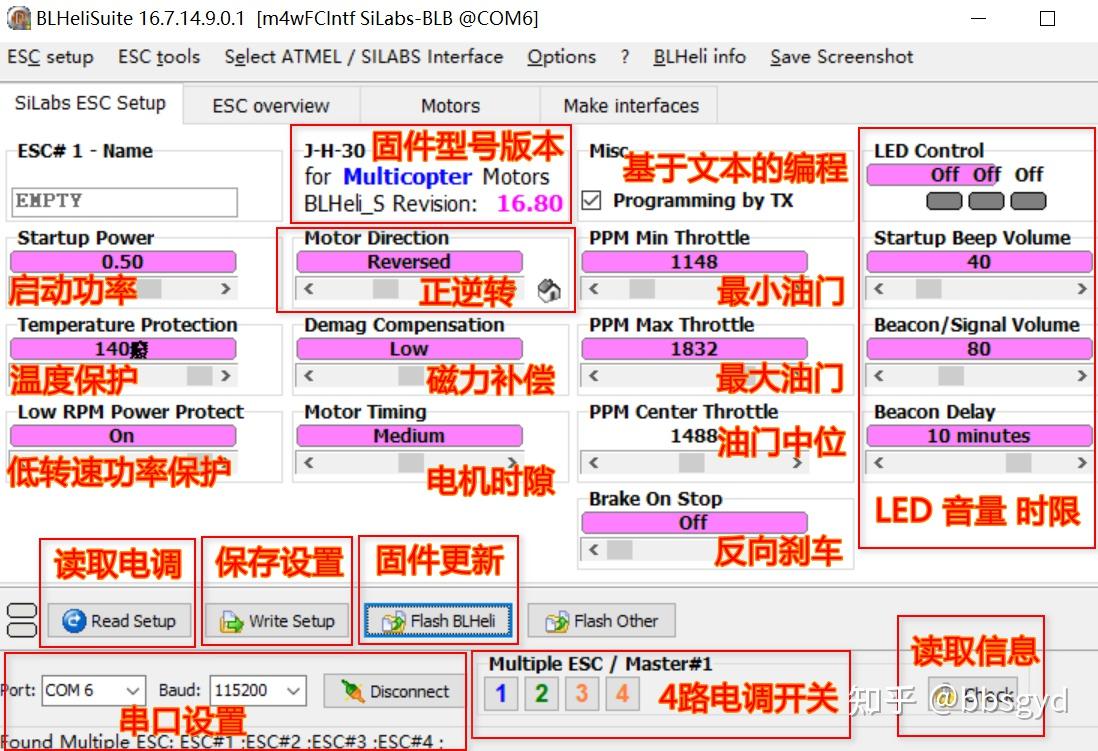
3-2)读取电调参数:点击Check或者Read Setup按钮来刷新电调参数,在弹出的页面上,能看到电调的型号参数如J_H_30,固件版本REV16_80,如低于16.77则需要刷新固件,以配合开启RPM滤波功能。
3-3)商用固件刷写:接着就是为电调写入新版本的固件,点击Flash 字样按钮,在固件版本选择窗口中选取电调对应型号和最新版本固件如J_H_3_24_REV16_80.hex,点击OK开始刷写固件。
3-4)刷错电调固件:写入会导致电调变砖,但这失误并不可怕,只需使用电调专用接口通信协议转换器连接电调,载入正确的固件,电调就能恢复正常工作。
通常使用专用写码接口烧写固件时,四合一电调应当被看成四个独立的电调,需要逐一对四个电调进行固件烧写。电调固件存储的位置和最底层的引导代码(bootloader)在单片机闪存上属于不同的分区,只要底层bootloader没变就能重新写引导和更新固件。
bootloader中包含有IO配置参数,针对不同型号的电调,不同电调型号的IO参数都是唯一的。如果你有改变bootloader的能力,你应当就不需要看这一份资料了。
4)电调参数设置:
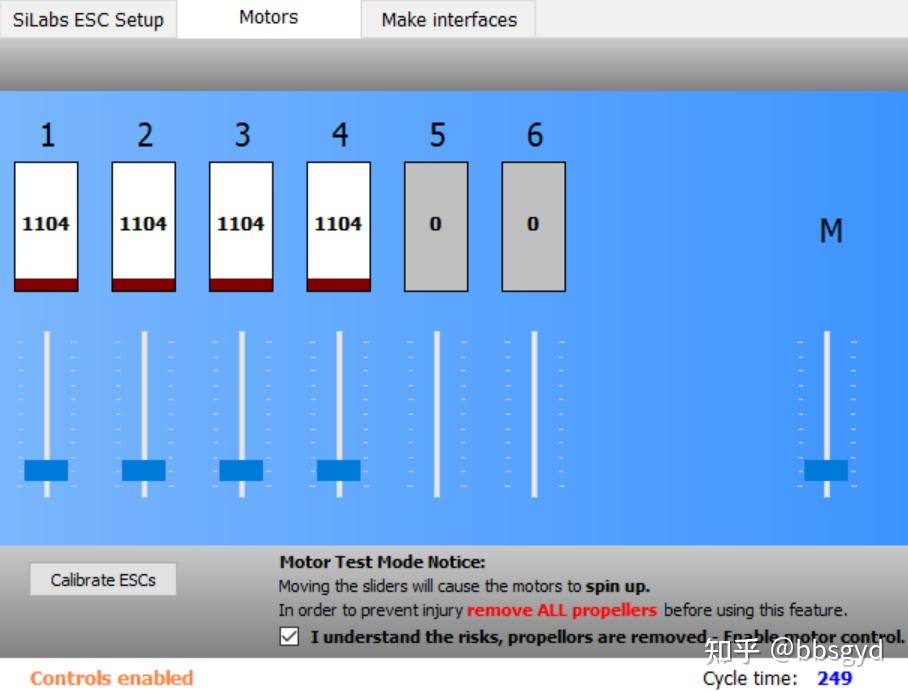
4-1)测试电机:点击调参软件的功能窗口切换页面菜单Motors。勾选I understand…对四路电调进行测试。确保电机上未装载螺旋桨,拖动电机转速滑条,对应的电机会旋转起来。这时可观察电机的转向,如果符合飞控调参软件中机型定义的电机位置和旋转方向,则进行下一个电机转向测试。
4-2)修改电机转向:如果转向不符合机型布局要求,可通过切换到ESC Setup页面菜单,在Motor Direction下对电机的转向进行修改,直到符合电机布局的转向要求为止。拖动Motor Direction下的滑动条,Normal为默认转向,Reversed为反向。修改完后选择需要写入的电调的编号如1号(在Multiple ESC下让1号显示数字其他几个不显示数字),点击Write Setup按钮,向1号电调中写入修改后的设置的参数。如果失败提示Nothing to write…表示参数未被修改,如果成功写入参数则提示Write OK。在参数设置页面中还可以设置一些其他的功能,如静止提醒时间、消磁、刹车、油门检测范围、告警音大小和类型、KV值等,通常都为默认参数。
4-3)参数设置完毕,关闭电调调参软件。进入飞控调参软件,可对电机进测试,在飞控调参软件的电机页面中,需要再次检查四个电机的转向是否正确,测试通过后才能安装螺旋桨去试飞。如果测试中电机的转向不符合,再次进入电调软件中设置。
4-4)以AM32为例,设置参数和固件更新可使用在线调参方式进行,地址http://www.am32.ca如果无法访问需要下载AM32离线调参软件。重要提示:在升级固件前,请确认电调型号,不能写入与型号不对应的固件,否则电调会变砖,谨记!
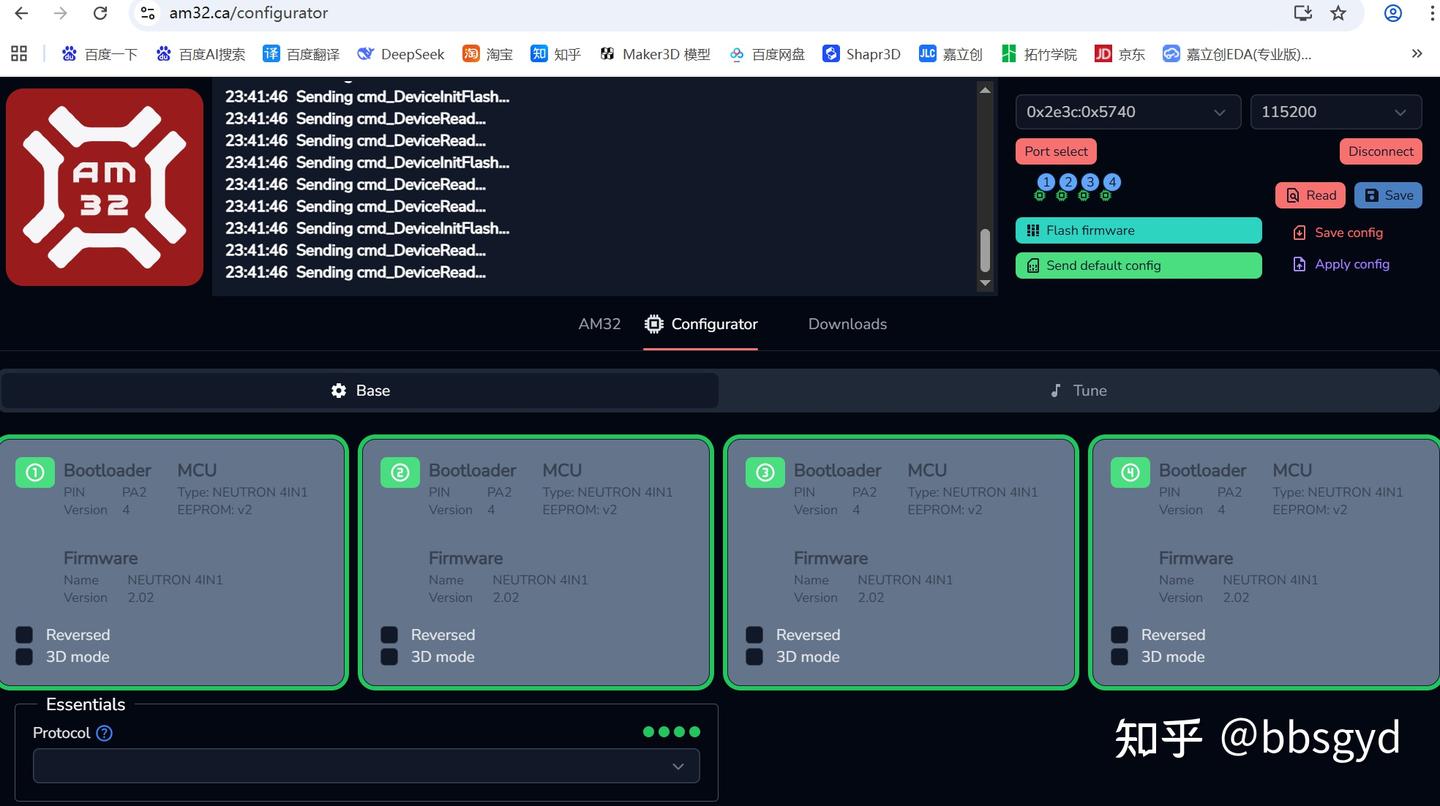

AM32电调的另一个常用调参软件,也有在线WEB网页设置和离线软件设置两种。在线设置的地址是https://esc-configurator.com/,用微软的EDGD或谷歌浏览器打开链接并于右下角出点击Accept all同意使用全部cookie。
Web 应用程序支持运行 BLHeli for Atmel、BLHeli for SiLabs 和 BLHeli_S 固件的电调。BLHeli飞控透穿端口连接,目前是AM32电调唯一支持的接口方案。
Esc-configurator离线软件的下载链接:
https://pan.baidu.com/s/1sueN7gMP5CcSXLqrL_9OPw?pwd=2pw2 提取码: 2pw2
进入软件界面后选择端口,连接电调,读取电调参数,再进行参数设置。读取电调参数前,务必给电调接上电池,否则无法读取成功。
4-5)直接使用BF地面站Motor页面修改电机转向,对于支持Dshot的电调而言,Dshot保留的参数设置指令可以在Betaflight Configurator中直接调整电机转向。
Betaflight固件版本在4.4以上,就可以支持这种简便的电机转向调整方法,但有时你会可能发现,修改保存并重启飞控后,电机转向并没有被修改成功,这就需要使用电调软件去设置电机转向参数,才能达到使用目的。
第六章 多旋翼穿越机高级调参
第1节 穿越机飞控的PID调参
*本章节也可参阅《穿越机技术基础》调参软件使用一文*
组装穿越机离不开飞控调参,而PID参数设置正是其中最具挑战的环节之一。很多刚入门的飞手对PID调参感到畏惧,主要原因在于不知从何入手。本文通过实验记录的形式,系统梳理了PID基础参数的设置方法,旨在为初学穿越机组装的萌新提供一个清晰的入门指引,助你顺利启航,飞得尽兴、飞得明白。
在穿越机技术体系中,除了选用优秀方案、高质量硬件与扎实的组装工艺之外,调参同样是决定飞行品质的关键环节,而PID调参与试飞技能更是不可或缺的一部分。由于飞控固件与调参工具持续迭代,大多数萌新感到难以适应,甚至不知如何下手,不少飞机在组装完成后,因参数设置不当,始终无法达到理想的飞行状态。
此外,许多萌新在装机时预算有限,不得不选用成本较低的机架和电机。这类硬件在组装的飞机振动较大,进而引发一系列噪声干扰问题。实际表现为加油抖动、转弯摇晃甚至飞行姿态失控等问题。如果你也遇到类似情况,可参考文中提供的具体设置示例,学习使用各类调参工具,逐步掌握处理方法,快速定位并解决问题。
本节内容由PID调试实验笔记整理而成,特别补充了萌新在入门阶段不易掌握的关键知识点,提出要重点理解本章关于角速度的概念,并对一些容易产生歧义的概念进行了重点说明,适合在初步调参阶段参考使用。
1)PID控制概念
PID控制是一个用于修正输入与输出控制误差的闭环控制系统,在人类科技活动中历史悠久,得到大量的应用,它是一个模拟量目标控制系统,简单实用。
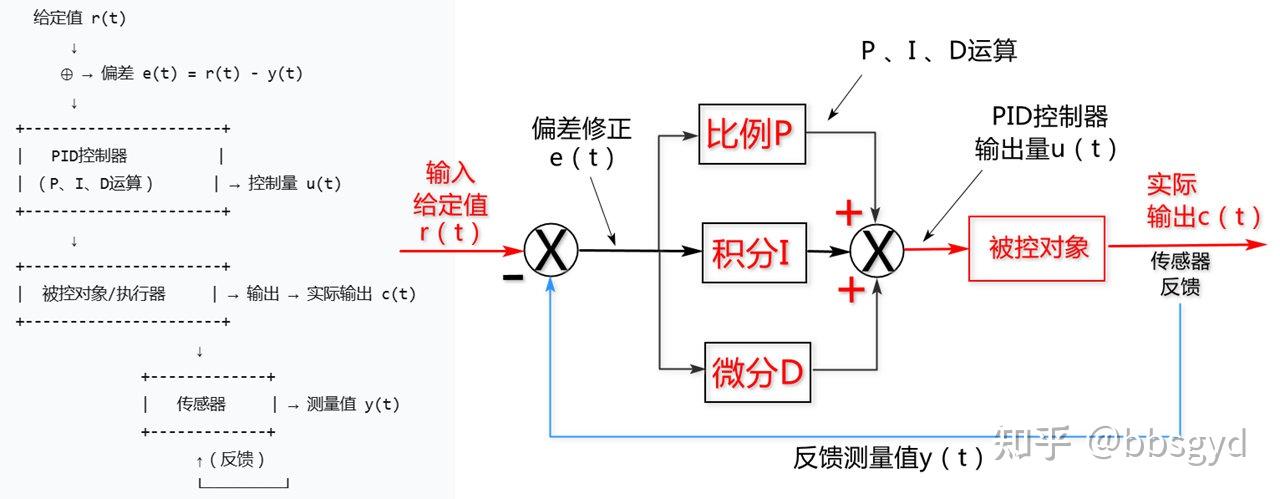
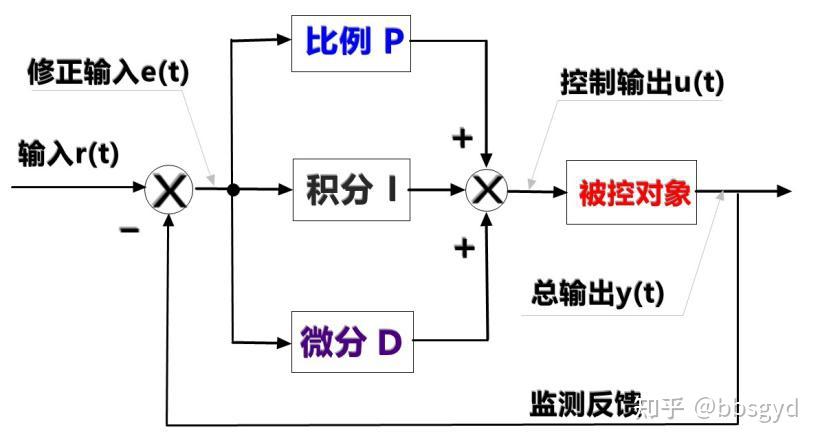
1-1)PID是比例-微分-积分控制的英文proportional-integral-derivative control简写。PID控制策略广泛用于工业过程控制,在机械运动控制上,特别在电机驱动控制中有着广泛的应用。PID控制策略是一种闭环回路控制系统,根据给定值和实际输出值构成控制偏差,将偏差按比例、积分和微分通过线性组合构成控制量,对被控对象进行控制。PID算法就和我们常用的加减乘除法一样,是一种常用的数学计算方法。
1-2)PID闭环控制流程:输入-运算-输出-结果反馈-修正运算-再输出-再反馈。
1-3)穿越机PID的控制机制:穿越机飞控中的PID控制策略,以Betaflight的PID控制器为例。
P 理解为发起修正飞行动作与预期之差(误差)的直接作用力。
I 是在PD无法继续起到修正作用的时候(系统达到稳态时),继续将飞行动作修正至预期的力(修正的惯性)。
D 则是对抗一切飞行动作变化趋势的阻力(对于Betaflight固件而言,D是Damping而不是Derivative,增大D就是增大阻力)。
**这里的飞行动作,终究不是飞机的姿态角度,而是姿态在不同轴上变化的角速度**
当飞行动作与预期动作产生误差时,P直接根据误差的大小按照比例进行修正。而I则是将未被修正的误差持续积累,和P一起正向修正误差。
最后D根据修正误差的速度施加阻力,阻止误差修正速度过快。
当飞行动作刚好和预期重合时,P停止作用,但飞机本身的惯性,以及电机响应的延迟,会使得实际的飞行动作修正越过预期值,称之为超调,在阶跃响应曲线上的表现则是曲线越过参考线,继续上升。
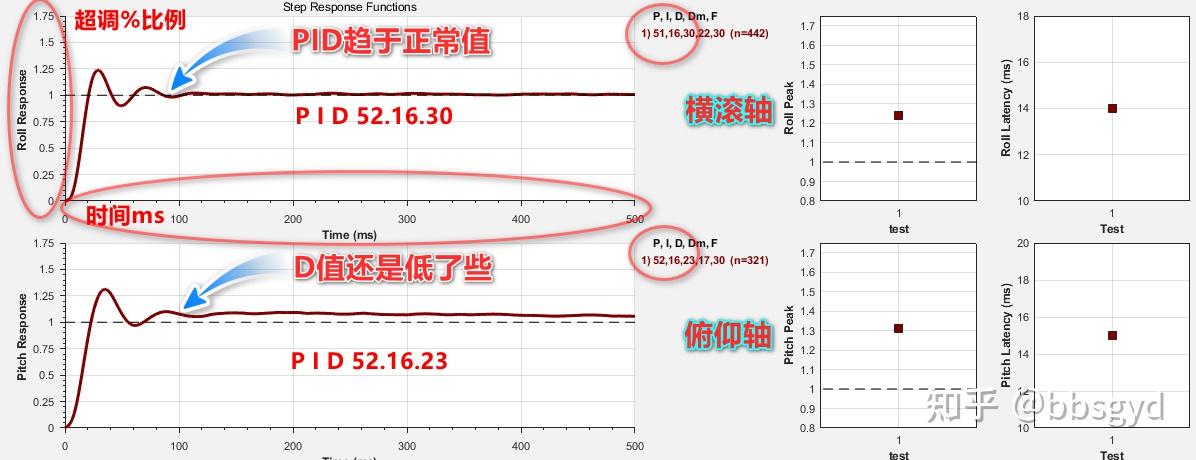
当超调发生时,P会开始修正超调,I所积累的修正惯性会使得超调程度加剧,D则会开始对抗超调的增加。当超调后的修正惯性与超调前的修正惯性抵消时,曲线会开始向参考值回落。回落的速度取决于PD的比例。PD比例理想的情况下,再次回落到参考线时修正的速度已经所剩无几,系统的稳态和参考期望值重合。
如果整个PID值调整的非常理想,将会看到阶跃响应曲线很快地到达1,在产生极小的超调迅速回落到1并且锁定,这样状态的穿越机飞行操控性能极高。
但是,如果PID不匹配穿越机的动力情况(既转动惯量和动力性能),则以上的调整还要发生几次,甚至是永远调整不到位,表现为飞行过程中的螺旋桨杂音,电机异常发烫,图传或运动相机拍摄的视频画面将产生果冻效应等。
1-3)PID值设置经验:动力强的飞机PID数值越小,动力弱的飞机PID数值越大;动力一定时,飞机重的PID数值应该越大、飞机轻的PID参数应越小。
过低的PD值,飞机无法稳定飞行,显得没有力度,很难锁定目标姿态的角速度;但是,过高的PD值会使飞机暴躁,且电机容易发烫,设置PD参数时需要在更大的动力和适当温度之间进行取舍。
2)PID控制在穿越机飞控中的作用
2-1)、穿越机PID控制策略:包含PID计算控制、Rate角速度控制、PID滤波控制。通过拖动滑条,改变控制参数,自动生成PID值,大多数飞机可通过这种方法预置PID控制参数,许多新入坑的新同学也是用这种方法来设置飞机的PID参数。

2-2)、姿态(角速度)采样:陀螺仪姿态角速度采样数据,经过硬件滤波和运算器滤波后,将飞机三维姿态角速度数据与输入指令信号转化的Rate值对比,如有误差则继续修正,直至达到输入指令要求为止。这个过程瞬息之间会进行数千次,这就是PID循环速率(次数/秒、单位Hz)。
2-3)姿态信号运算滤波:在对陀螺仪姿态角速度采样数据进行运算处理时,运算器会将采集到的真实的飞机姿态角速度和振动噪声一并放大,会影响输出信号准确性。在运算时,需要对无用的振动噪声信号进行滤除,这就是滤波。

2-4)振动噪声分布:对滤波器的正确使用,要先了解振动信号的频率分布。
对于一般的五寸穿越机而言0-40Hz为有用的操控信号(姿态角速度),不能进行削减和压制,要求保证信号的完整性和低延迟;40-80Hz为有用信号的谐波范围,在良好的装机情况下应该是干净的,在干净的情况下应尽量避免设置滤波器,因为谐波范围内的振动信号的延迟和飞行手感息息相关,低延迟有助于更好的洗桨抑制和更加跟手的操作体验。
如果炸机损坏了穿越机的机架,40-80Hz这个区间会第一时间显示出严重的集中噪声。如果你比较节俭,可以使用滤波器和陷波器参数设置来压制,但最好还是检查并更换损坏的部分。激进的调参也可能会使得40-80hz这个区间出现分散的噪声,如果追求极限飞行性能,这也是可以接受的。
80-200Hz之间不应该出现振动噪声,如果有,要检查装机情况,可能是劣质机架加工公差导致虚位,建议更换机架;也可能是紧固螺钉没有拧紧。
设计水平合格的机架,应该只有一个机架共振频率,且其中心频率在210-270hz之间,如果这个机架在150hz-270hz之间的共振频率尖峰超过2个,就是该考虑更换机架,或者检查装机情况。
150-600hz范围内,会有多条频率和油门大小成正相关的噪声带,这些是由于电机桨叶转动的动平衡缺陷所产生的噪声。对于支持双向Dshot的飞塔来说,可以启用飞控的RPM滤波器,用较低的代价精准过滤这些噪声。
以上的数据都是针对普通的五寸花飞穿越机或者是竞速穿越机的。对大于5寸的的穿越机,上述所有频率范围都需要下调,对小于5寸的都需要上调。
2-5)滤波的作用:在陀螺仪采集姿态角速度时,为了保留更多的原始细节,会将电机、桨叶、机架等振动所产生的的细微角度变化也采集下来,这是不可避免的。在运算时开启运算滤波,将这些无用振动信号进行衰减弱化,使输出控制信号更为纯净,不让电机去执行高频振动信号指令,将电机输出功率全部用在执行飞机姿态控制上,也可以减少电机发热和节约电池电量消耗。滤波是必要的,但错误的滤波会导致失控或操控延时;过多的滤波会导致动作迟缓或者延时,对飞行操控没好处。滤波设置是在控制振动和操控延迟之间取舍的事,就看你希望的是更多地控制振动噪声对PID循环的影响,还是追求更少的操控延迟。

2-6)分析改进振动成因:穿越机的振动主要由两方面因素共同作用,其一是电机与桨叶的动平衡缺陷产生的高频振动源;其二是机架的刚性不足、装配公差等结构缺陷,这些缺陷会与高频振动源形成共振效应,进一步放大振动幅度。同时,空气流动的随机扰动、陀螺仪的本底噪声以及未固定的线缆振动也会叠加形成复合噪声。
机架的设计非常重要,使用烂机架的人很多,这就有必要做好滤波设置的准备,为了省钱买到垃圾部件,只有一句话,机架烂全靠滤波干。但是,不要试图靠滤波手段让那些烂机架组装的飞机变得优秀起来,有些机架它本就不应该诞生。所以,一定要选用设计优秀、质地优良的机架,才能有效保证飞机装好了,很快就能调到好飞,而不是去面临滤不完的振动所带来的麻烦。
3)PID日志分析准备
3-1)熟悉固件与调参软件:萌新有必要熟悉飞控固件的更新与Configs配置,毕竟要继续玩下去,这是一个绕不开的坎。下载固件和配置文件、安装飞控调参软件和驱动程序、熟悉电脑软件的基本操作,都是玩穿越机必须要具备的基础技能。
3-2)以下提到的各种穿越机软件,下载地址请于文后附件内查找链接。安装飞控驱动程序,使电脑操作系统能够识别到通过USB连接的飞控硬件型号,调参软件能够通过USB虚拟串行口连接飞控固件进行参数设置。
安装Betaflight Configurator调参软件,这是使用Betaflight固件飞控的专用参数设置软件,有时也将它称为地面站软件。
更新飞控BF固件,用Betaflight Configurator调参软件里的固件更新工具,对飞控上的单片机进行固件更新,选择对应飞控的品牌型号的固件目标,正确配置飞控IO资源。Configs配置可以在开源社区查找下载。
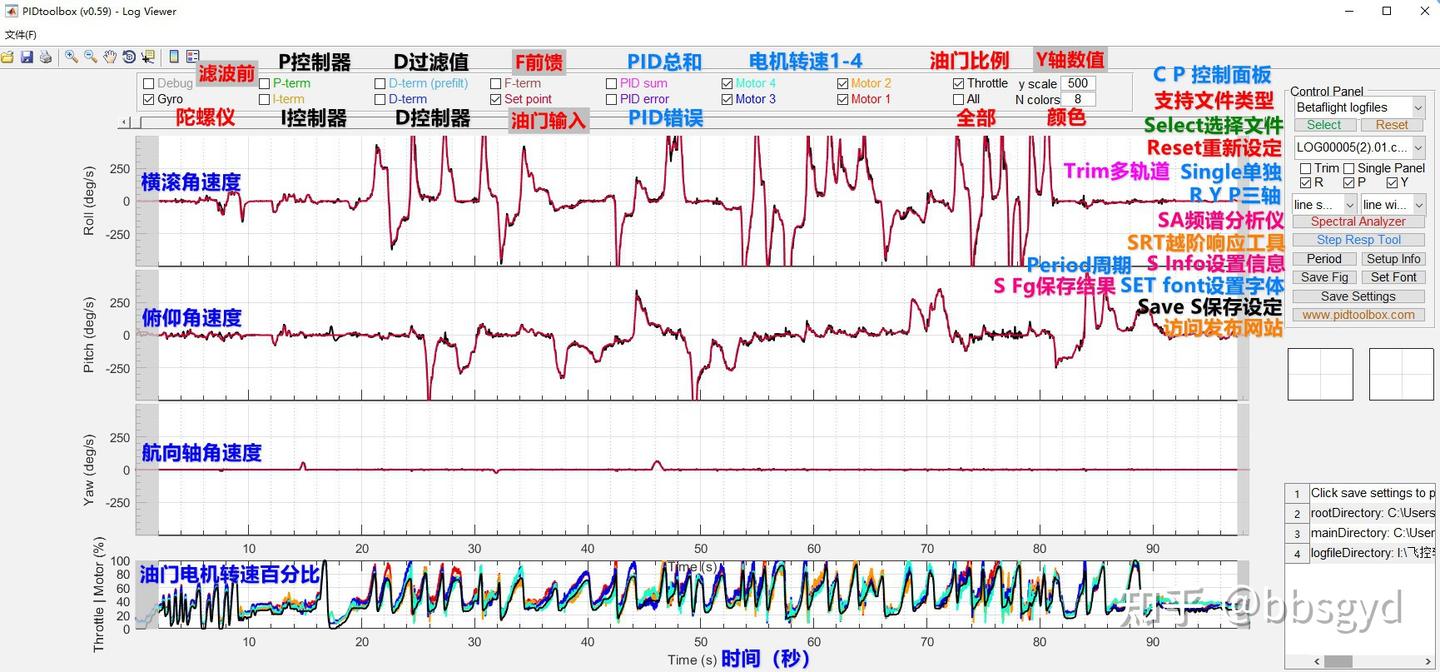
3-3)查看飞行日志的Betaflight Blackbox Explorer软件,用于播放飞行日志文件(振动频率分布),查看陀螺仪采样的振动频率图形,作为滤波频率设置参考依据。使用Chrome浏览器访问https://blackbox.betaflight.com/免安装使用Progress Web App。
3-4)安装PIDtoolbox分析软件(生成PID阶跃响应曲线、振动频谱)百度分享地址https://pan.baidu.com/s/1g7iXeyNbIysaKgaFFHPizw?pwd=alex提取码alex。此软件用于分析PID跃阶曲线是否符合这台飞机使用,调整PID参数有了这个工具,不再需要繁杂的盲试,调机效率大大提升。使用这个软件需要安装一个数学运算工具,注意看下载文档说明。请先下载运行环境软件MATLAB Runtime(V9.3A版本为1.3GB大小)。
MATLAB下载地址:
MATLAB Runtime下载页面列表:https://ww2.mathworks.cn/products/compiler/matlab-runtime.html
软件使用视频教程,来自EgnoPopy-fpv:
https://www.bilibili.com/video/BV1V7411G7qN/?spm_id_from=333.788.videocard.18
参考WIKI:https://github.com/bw1129/PIDtoolbox/wiki/PIDtoolbox-user-guide
https://www.youtube.com/watch?v=5oOSEeHLMLM&t=959s
下载安装PIDtoolbox,百度分享
https://pan.baidu.com/s/1g7iXeyNbIysaKgaFFHPizw?pwd=alex提取码: alex
https://pan.baidu.com/s/1wG0vaxSG7w06ktMVCNANyw?pwd=c8mn 提取码: c8mn
3-5)飞控基本设置:设置黑匣子(飞行日志记录仪),飞机硬件装好后,使用BF调参软件对飞行日志记录器进行设置,将采样设为1-2K,并擦除存储器(格式化闪存)。飞机上电后解锁电机,记录器就会将陀螺仪采样的数据保存在闪存芯片里,飞完下来通过USB数据线连接飞控,可以读出记录文件用于调参分析。
对于Betaflight版本号小于4.5.0 的固件而言,这里还需要将黑盒调试模式设置为Gyro Scaled;对于版本号大于等于4.5.0的固件而言,黑盒调试不需要特别设置,因为默认设置下,陀螺仪经过缩放后的原始数据已经被自动地记录在Gyro Unfiltered中。

设置飞行参数(基本参数),直接使用BF默认的PID参数。BF默认参数十分保守可以支持绝大多数五寸正常飞行,默认参数都飞不起来的飞机大可扔进垃圾桶了。
设置滤波参数(基本参数), 套用BF默认参数,并注意RPM滤波是否启用,如果没有RPM滤波,则应该去电机页面启用双向Dshot,保存设置,飞控会自动重启并应用RPM滤波。
3-6)TPA的作用机制:当飞行操控的油门值大于TPA设定值时,PID的作用将按照TPA预设比例数值削减;当电机在小油门时输出力度小,使用一套标准PID控制,大油门时电机输出力度过大,需要一套减弱的PID控制,TPA起始点设置的油门至值(1250)就是决定是否削减PID的界限,削减多少由TPA百分比参数决定,即TPA 0.5-0.65数值,就表示将削减50%-65%的PID值。
设置Rate页面中的值为默认,设置TPA值为默认TPA油门点和比例。
3-7)试飞获取黑匣子分析数据(首先分析机架噪声):试飞与记录飞行日志数据(外场试飞),选择符合安全规则要求的试飞场地,准备好飞机后解锁电机起飞,要求飞行时间大于一分钟,飞机在试飞过程中不能触碰地面或者树木,尽量相对缓慢打杆,在航向、油门、横滚、俯仰杆量上都有几个大于1秒的操作杆量,让飞机能保持一个较长时间的姿态角速度变化状态。进行多次全油门扫描飞行,既油门从0缓慢抬升至100。这个过程不能低于2秒,扫描次数不能少于3次。
可以在自稳模式下试飞,也可以在全手动模式下试飞,如果你对飞行操控不怎么熟练,那就在自稳模式下进行。飞行结束后及时降落锁闭电机,拆除飞行电池。
启动BF调参软件,将飞控用USB线和电脑连接起来拷贝黑匣子日志数据,进入调参界面中的黑匣子页面,点击“激活大容量存储设备”,飞控会自动重启,并且电脑上会多出一个的大容量可移动存储设备(U盘),将该U盘中的btfl_all.bbl拷贝到电脑中。如果你担心以后找不到它或者不知道是哪一次飞行的数据,Windows系统可以在拷贝后重新命名文件名;如果是MacOS系统,则需要将拷贝后的文件的“显示简介”中取消“锁定”选框的勾选,才可以修改文件名。
4)飞控滤波参数设置
4-1)噪声功率谱分析:上一节内容完成了软件准备和试飞日志记录,接下来就可以进行滤波参数的设置,设置滤波器将无用的振动噪声进行压制滤除。
打开PIDtoolbox Pro,点击Open File按钮加载飞行日志。在Open File下方选择要分析的日志文件编号。在主界面点击Spectral Aanalyzer按钮进入频谱分析界面,在select files文件列表中选择需要分析的日志,在下面的类型列表中选择Gyro和Gyro prefilt,点击Freq x Throttle按钮进入 油门-振动功率密度谱 界面。
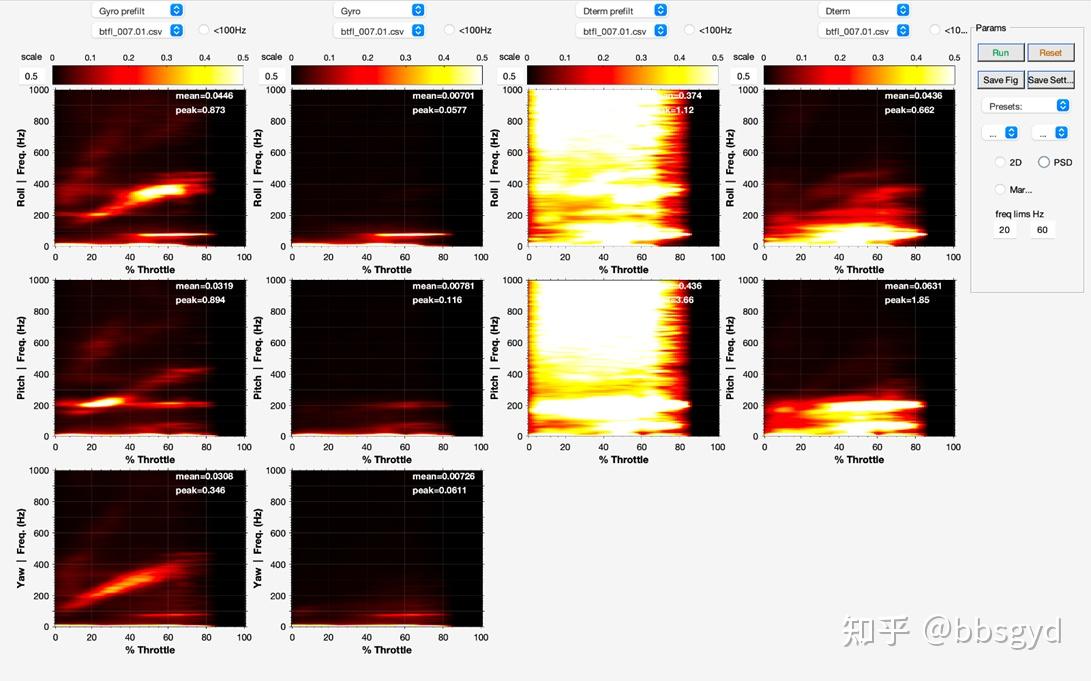
这是一架8寸X8影视穿越机的油门-信号功率密度谱,最左侧从上下三张图分别是Roll Pitch Yaw轴的Gyro prefil图。每张图的横坐标是油门,纵坐标是频率,而图中红色的亮度则代表着信号的相对功率密度,亮度越高振动功率越大。
以中间的Pitch轴为例,其有用信号集中在0-30Hz,而中高油门范围在73Hz附近开始出现一条共振带,该密集的噪声亮带频率不随油门变化而变化。这种中低频率共振,预示着穿越机上有大块的东西没有固定稳当,经排查为相机的柔性安装座。再往上200hz有一条贯穿整个油门范围的共振带,这就是这架穿越机的主要共振频率。从120hz到430hz的斜向共振带,频率与油门值正相关,就是电机转速相关的噪声。同时可以注意到,Roll和Pitch轴的250hz往上都有一层模糊的噪声,这个是与电机转速关联的噪声谐波和机架震动等其他因素共同作用而造成的。
穿越机通常应该保留0-30Hz有用信号,不必滤除;而73Hz附近的共振带则需要优先尝试优化硬件来解决,通过更换相对硬质的相机座,将这条共振带亮度减弱到可接受水平。所以,真正需要设置滤波器来处理的噪声只有三种,第一种是机架主要共振噪声,第二种是转速相关噪声,第三种是高频模糊噪声。
4-2)设置陀螺仪滤波器参数,依照上图左侧的振动噪声频率分布,对滤波器进行设置,压制这三种有害的振动噪声。
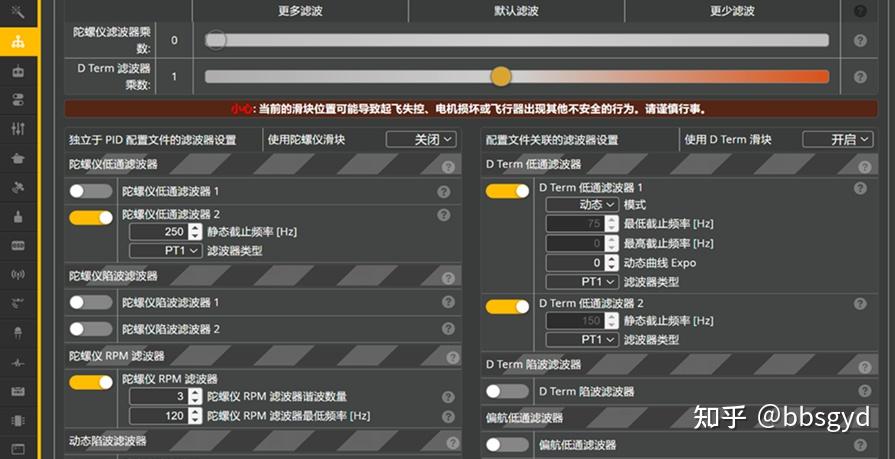
进入BF调参软件的陀螺仪滤波器设置页面中,只开启第二个低通滤波器,设置截止频率250Hz,滤波器类型为PT1类型,这样就可以压制高频模糊噪声。
将动态陷波滤波器的陷波槽数设置为2, Q因子设置为450,最低频率设为150, 最高频率设置为600,这么设置可以智能地处理绝大多数穿越机机架的主要共振噪声。(如果机架特别优质,而且你对此有足够信心,将陷波槽数设置为1,Q设置为500以获取最大性能)这样就压制了机架共振。
最后,打开RPM滤波器将其谐波数量设置为3,最低频率设为120,最高频率设为500,就能压制住绝大多数的与转速相关噪声。如果穿越机机架尺寸比较大,即螺旋桨的尺寸在8-13寸往上,还需要前往CLI中将rpm_filter_fade_range_hz设置为10或者更小的数值,并降低RPM滤波器最低截止频率。
4-3)D Term 滤波设置:陀螺仪滤波的调整是调整Dterm滤波的必要前提。在完成陀螺仪滤波参数的设置之后,才可以开始设置D Term滤波。通常使用滑块设置D Term滤波,已经足够将飞机调整至非常好飞的状态。调整D Term滤波需要在之前已经设置的参数下进行飞行测试,然后逐步以0.05单位为步长向右调整D Term滤波滑块,再次进行飞行测试。每次参数的调整,都会使电机温度都会变得更高,但是穿越机的姿态响应也会变得更好。继续向右调整滑块,直到出现以下任意一种情况:电机的温度非常高,达到烫手且完全无法握持超过5秒;飞行过程中螺旋桨的声音变得非常嘈杂;飞行画面因为抖动出现非常严重的果冻效应;飞行过程中感觉“油门不听使唤”,在维持油门不变的情况下飞机有意外加速升天的趋势,飞机直接螺旋升天。
出现以上的情况,就表明当前陀螺仪滤波+ DTerm滤波+默认PID 的参数组合,已经触及了这一架穿越机的硬件极限,为了能够继续调整PID,应该将D Term滤波滑块向左移动0.05–0.15个单位滑块,作为最终的滤波参数。
第2节 PID调参
Betaflight固件飞控PID 调参思路(按优先级)
A-调整滤波,尽可能降低噪声。
B-确定D项的合适范围。
C-根据D项调整 P 项使操控及时、无回弹。
D-提升I项以消除稳态误差。
E-根据需要调整前馈(Feed-Forward)改善手感。
G-配合I-Term Relax 抑制快速动作后的积分积累。
H-适当调整反重力(Anti-Gravity)等辅助参数。
1)D 值调整
使用 Betaflight的“Damping”滑块调整 D 值。建议从默认值开始,小幅增加,每次调整不宜过大,飞行后关注电机温度和画面抖动。
判断D值过高的迹象包括螺旋桨出现明显的低频“呜呜”声,或图传画面出现果冻式高频抖动。参数调整试飞中发现电机温度明显升高时应降低 D值。
Betaflight的动态阻尼(Dynamic Damping)可让飞行器在平稳飞行时使用较低的D,并在翻滚、急转时提升到设定的 D-max。
D-max通常比基准D高20%~30%,不宜差距过大,以免造成过度阻尼和电机过热。
d_min_boost_gain(D-min 增益)决定D提升的速度,默认值27已能满足大多数情况,除非需要更快响应,否则不建议过度提高。
只有当需要降低直线飞行时电机负荷,或缓解振动时才启用动态阻尼。
2)P 值调节
在确定D不会引起过热后,通过“Proportional”滑块提升 P。增加 P 能提高打杆跟手度,但过高会出现回弹或振荡。调节时让飞行器做快速翻滚或俯仰动作,如果动作结束后出现明显反弹,说明P过高;如果机体感觉“软”,说明P过低。
对于重心与推力中心偏差较大的DC结构穿越机,可适当提高俯仰轴P值,以提高稳定性。
5寸X架机型的P滑块通常在0.8-1.2之间即可满足大多数需求,具体值根据机体响应和回弹情况微调。
3)I 值优化和I-Term Relax
I项负责消除稳态误差和抵抗外界扰动。若在零油门下降或倒飞时机身容易偏移,可适当提升I。调节方法为将油门收至最低或进行倒飞,观察姿态是否偏移;如有偏移,逐步提升I滑块,直到姿态漂移不明显为止。
I值过高会导致机体感觉“机械”响应迟缓,因此建议缓慢调整,配合反重力功能。
I-Term Relax(I 值释放)在快速操控时锁定I积分,避免翻滚结束后的反弹。
模式分为基于设定点(Setpoint)和基于陀螺仪(Gyro),大多数飞手选择“Setpoint”。
iterm_relax_cutoff控制I锁定的阈值,数值越低,锁定越早。
自由飞或拍摄场景推荐10-15;比赛或需要敏捷反应时可设为20-30。
对于动力滞后的重机型,可使用陀螺仪模式并适当降低iterm_relax_cutoff以提升效果。
4)前馈值(Feedforward)
前馈根据遥控杆的移动速度提前驱动电机,提高控制响应。
适当的前馈可以减少延迟,但过高会放大手部打杆抖动,使动作起始时过冲。
Betaflight 4.3 引入了feedforward jitter reduction,能在慢速摇杆操作时抑制前馈噪声;同时提供feedforward smoothing用于平滑前馈信号。
feedforward_smooth_factor(前馈平滑因子)根据遥控链路设置,参考如下。
250 Hz 链路:40-50,并启用feedforward_averaging=2_point;
500 Hz 链路:65-70,并启用2_point平均;
50-150 Hz 链路通常无需前馈平均,默认平滑因子25足够。
jitter_reduction_factor 控制抖动抑制的力度默认值 7 ,适合大多数飞行器和竞速应用;
自由式或电影拍摄可提高至12-15,让慢速动作更平滑;
纯竞速需求可降低至5,以减少延迟。
feedforward_max_rate_limit可限制摇杆接近最大行程时的前馈强度,默认值 90已适用,除非超低动力机型才需要提高。
5)反重力(Anti-Gravity)
反重力功能在快速油门变化时暂时提升P和I,避免猛加油或收油时机头突然下垂或抬头。Betaflight 4.3 新增了P补偿,并优化了I补偿的持续时间,默认增益 3.5。
5寸穿越机建议增益在3.5-5范围内,小幅提高能减轻油门变化导致的俯仰下垂,但数值过高会引入高频颤振。
反重力配合I-Term Relax使用效果更佳。反重力抑制快速油门变化的姿态偏移,I-Term Relax抑制快速杆量输入后的积分过冲。
6)补充建议
宽机臂的花式机型结构与动力匹配要适当提高俯仰轴阻尼;大扭矩电机在调高PID主增益时应谨慎,建议主增益乘数不超过1.3。
启用动态闲转Dynamic Idle,在零油门时保持3000-4000 RPM的最低转速,可提高低油门控制力并减少脱桨。
调整遵循一次调整一个参数原则。每次飞行只修改一项设置并做好记录,通过反复测试逐步逼近理想状态。
通过以上基于官方资料和经验的调参流程,可在兼顾动作稳定性和灵敏度的基础上,优化穿越机的飞行表现。
五寸花飞穿越机的PID推荐值:
| 参数项 | 推荐值 | 数值类型 | 说明 |
|---|---|---|---|
| D 值滑块起始位置 | 1.0 | 滑块 | 初始调试起点 |
| D 值滑块上调步进 | +0.1 | 滑块 | 每次小幅上调 |
| D 值滑块回调步进 | -0.05 | 滑块 | 果冻抖动时降低 |
| d_min | 45–55 | 绝对值 | 平飞或低速时防震 |
| d_max | 55–70 | 绝对值 | 高速转向/大动作响应 |
| 动态增益 | ≥27 | 绝对值 | 决定动态阻尼提升速度,默认 |
| P 值滑块起始 | 1.0 | 滑块 | 起始点 |
| P 值调节步进 | +0.2 | 滑块 | 提升跟手感 |
| X 型 5 寸花飞穿越机 P 推荐 | 70–90 | 绝对值 | 微调至无回弹 |
| I 值滑块起始 | 0.6 | 滑块 | 初始值 |
| I 值调整步进 | +0.1 | 滑块 | 缓解低油门姿态漂移 |
| X 型 5 寸花飞穿越机 I 推荐 | 100–130 | 绝对值 | 根据漂移微调 |
| I-Term Relax 截止频率 | 13–20 | 绝对值 | 防止积分饱和导致过冲 |
| I-Term Relax 模式 | Setpoint | 模式 | 推荐用于大多数情况 |
| Anti-Gravity 增益 | 3.5–5 | 绝对值 | 提升姿态稳定性 |
| Anti-Gravity 支持版本 | BF 4.3+ | 版本 | 含P/I增强 |
| feedforward_smooth_factor(竞速) | 40–50 | 绝对值 | 适用于250Hz遥控链路 |
| feedforward_smooth_factor(拍摄) | 65–70 | 绝对值 | 适用于500Hz遥控链路 |
| feedforward_averaging | 2_point/3_point | 模式 | 平滑前馈(500Hz/150Hz)遥控链路 |
| jitter_reduction_factor(竞速) | 5–7 | 绝对值 | 快速反应 |
| jitter_reduction_factor(拍摄) | 12–15 | 绝对值 | 稳定慢速飞行 |
| feedforward_max_rate_limit | ~90 | 绝对值 | 限制过冲 |
*亚哈提供-具体调参教学可搜索破风小课堂
第3节 RPM滤波器的使用(飞控、电调固件更新实操)
1)RPM滤波器的作用
穿越机Betaflight开源飞控固件的RPM滤波器,是基于电调提供的电机转速数据,测算出电机转动所带来的振动噪声的频率,并精准滤除的智能陷波滤波器。开启RPM滤波器后,陀螺仪在进行飞机姿态振动采样时,可快速有效地避开因电机旋转所带来的无效抖动信号,使采集的飞机姿态角速度信号更加纯净,后续运算出更符合实际角速度的修正指令。
2)RPM滤波器的必要性
有别于其它类型的滤波器,RPM滤波对性强。因为RPM滤波本质上是陷波滤波器,且精准针对转速相关的噪声进行滤除,所以它造成的操控延迟非常低,适合用在需要快速反应的各种飞行操控中。RPM滤波器的使用可减少滤波处理时延,有效增加飞机姿态稳定性,还可以减少电机发热量、增加电池续航时间,这是一个提升穿越机综合性能的有效技术手段。
3)RPM滤波器开启的条件
需要飞控固件支持RPM滤波功能,以及飞控单片机处理速度足够快,建议使用STM32F405/F7/H7系列单片机的飞控,且电调固件支持双向Dshot功能。如需刷写飞控和电调的固件,需要在运行windows系统的电脑中,使用飞控和电调调参软件完成固件写入工作。
4)飞控固件版本要求
飞控固件需要4.3.0以上的版本,并需要配合Betaflight Confgurator调参软件,要求调参软件版本在Ver10.9.0以上,最好使用10.10.0正式版。
5)RPM调参设置
将支持RPM滤波器功能的飞控固件、电调固件刷写完成后,启动飞控的BF调参软件连接飞控,进行RPM滤波器的相关参数设置。
RPM滤波器相关的设置项不多,在调参软件的“配置”页面中,将“电调”功能栏下的“双向DSHOT”开关打开,“电机极数”是需要去数一下电机外转子上粘住的磁铁数量,一般大电机14颗,小电机12颗;“电调协议”选择DSHOT300或者600,将“陀螺仪更新频率”设置为双4K或者双8K。
PID循环速率设置为4K时,电调协议应设置为DSHOT300。
PID循环速率设置为8K时,电调协议应要选择DSHOT600。
如果这两项参数的设置不匹配,设置会回退到4k和DSHOT300,甚至无法启用双向DSHOT通信功能,致使RPM滤波无法使用。
新一些的BF飞控固件支持不同的陀螺仪更新频率组合,支持RPM滤波功能,这得益于开源固件开发测试团队的努力改进,如果你也有兴趣,可以尝试加入开发团队中去贡献自己的一份力量(参与本文修订的亚哈说,他还真是其中一员)。

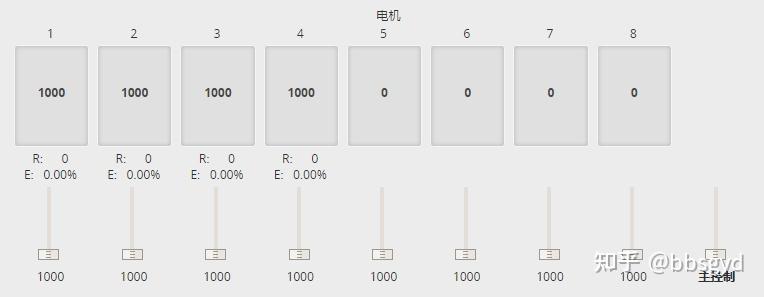
设置完以上的几个参数后,点击保存并重启飞控并完成自检,再到调参软件的“电机”界面测试电机是否可以正常开启。给飞机接上电池,接上数据线,进入“电机”界面,检查螺旋桨是否卸载,开始测试电机。将右下角的“我已了解风险”开关打开,轻微向上拉动主控制滑块,观察电机是否转动,转动方向是否与机型布局一致。开启RPM滤波时,油门滑块数值变化时,电机的转速数据也会相应变化。如下图中油门处于1298脉宽参数值时,电机转速为R:4171,错误E:0.00%。
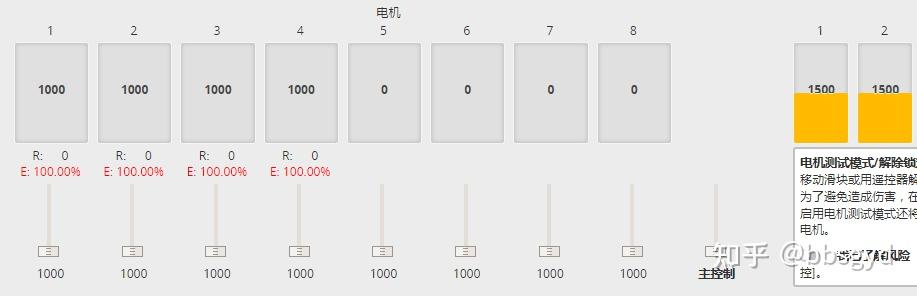
如果出现下图中的红色错误提示E:100%电机不转,可能是没有给电调接上电池,要么是RPM滤波开启的相关参数设定错误(或通信数据端口开启错误,或未正确连接通信数据线),或者电调固件不支持RPM转速数据回传到飞控。

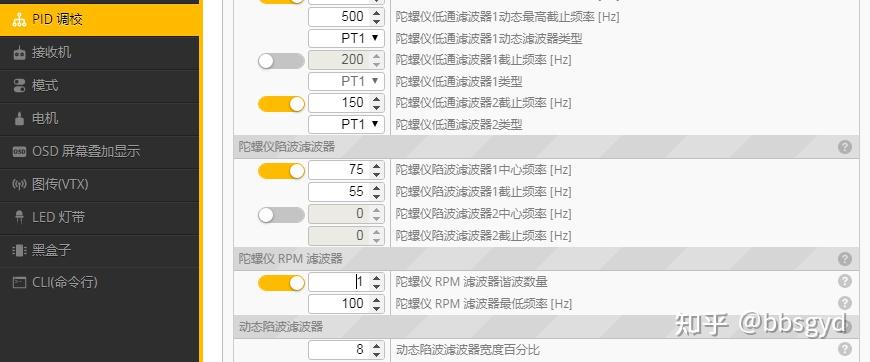
RPM滤波器在PID调参页面中的应用设置,需将陀螺仪RPM滤波器开关打开,谐波数量1-3个,建议设置3个。5寸机架或者更小的机架,最低频率建议设置为100-120Hz。更低的振动应当来自不平衡的桨叶或者歪了轴的电机,可更换它们之后再进行测试。RPM滤波器应用设置参数如下图,滤波器数量可以设置为2至3个。
飞控接入的设备较多时,如过多开启滤波器与陷波滤波器,会导致部分F405飞控的单片机处理器使用负荷大于75%,如果使用8K、8K陀螺仪更新频率配合DSHOT600电调通信协议,可能会导致飞控处理负荷过大导致炸机事故;F405飞控请谨慎使用RPM滤波器,如果飞控负荷较高,又必须使用RPM滤波器,可以考虑使用处理能力更强的F7/H7系列单片机芯片制作的飞控。
然而,F7飞控也未必能完全满足极端情况下RPM滤波器对处理器性能的要求,如果使用X8结构的穿越机,开启8k PID循环速率和RPM滤波器,F7的主控就需要同时处理8个电机的回传信息,同时运行72个陷波滤波器。此时CPU占用率会飙升至80以上,使得PID循环间隔无法稳定在125us以内,穿越机控制稳定性大幅下降。随之而来的就是机身抖动、电机发烫,炸鸡事故。
为了避免这种悲惨的结局,强烈建议F7飞控在使用X8混控器时,应用4k的PID循环速率和双向Dshot300。如果你一定要拉满X8穿越机,8k PID循环双向Dshot600,建议选择H7单片机系列飞控。
当然,使用高品质的电机、桨叶、机架硬件、辅于精良的制作工艺,是减少振动噪声最好的办法。软件滤波是必须的,但不是万能的,软件滤波是万不得已才使用。滤波器用得越多,滤波越狠,造成的操控延时就越大,飞机的操控手感就越差。滤波就是在电机发热和操控手感之间权衡的艺术,滤波是一把双刃剑,穿越机组装和调参时需要谨慎对待!
6)PID调试总结
使用符合硬件配置的PID参数、使用正确的方法去试飞、使用日志分析软件参与调参、调参时先P、D后加I、不同时更改多个参数,是快速调参的基本规则,只有多次进行调参与测试实操,才能总结出一套高效设置方法。
滤波设置过程中要理解陀螺仪低通滤波和运算滤波的设置规律,使用符合振动噪声强度的滤波器类型,陷波器使用必须依靠振动噪声分析软件确定滤除频带,必须要做好调试笔记,提升调参效率。
重点提示:测试电机时请不要安装螺旋桨,以免失控伤害到自己或他人!
------------------------------------------------------------------
版本与版权说明
《穿越机技术基础》系列学习资料合集不是一篇独立的文章,它包含许多不同的文章,编者将它整理成册,经历许多次修订完善,免费提供给广大穿越机爱好者用于个人学习之用。如果需要进行专业授课或者培训使用(商业应用,因此获利),请联系作者授权。本文中的一些资料来源于开源网站、论坛、同好网友分享,这部分资料的版权属于他们所有,所有资料转载请注明作者和出处,本文作者拥有本文的版权,请勿将本资料合集用于私自出版、商业分发、销售获利。
鸣谢:感谢手感FPV网店战友提供的部分穿越机图片,感谢各品牌部件商提供部分图片,感谢KZ邹老师提供部分资料,感谢许许多多前辈们提供的相关知识点文稿!
版权:本文为广西百色市右江区郭远东编著,作为多旋翼穿越机开源生态配套应用资料,本文并未要求独立版权控制,你可以复制修改其中的内容,但你需要将它们公布出来,且不得用于商业销售盈利,遵守开源资料使用规定。
特别说明:本文撰写颇费时日,虽然经历无数岁月洗礼,也投入海量精力去完善它,但其中某些内容出现错误在所难免,如与官方相关资料冲突,请以官方资料为准;如果你觉得本文应当修正其中的某个描述或者内容,请通过邮件告诉作者,邮箱是bsgyd@163.com,谢谢!
敬告新手:如果你通过本文学习穿越机技术而损失了青春和金钱以及心身健康,作者并不能为你承担赔偿责任,如果你不能明确学习它会给你带来的好处及损害,请放弃使用本文中的任何文字描述。穿越机技术的学习过程,是一件具备探索精神且非常危险的极限体育活动,需要科学的理论引导和正确的实现手段,希望一蹴而就走捷径的同学,请勿自误,珍惜生命、远离穿越机!
**穿越机项目有较大安全风险,请端正态度认真对待相关安全规程。
所有的准备都是为飞行而生,让技术为飞行服务!
发布版本和时间:
第1版发布日期:2020年2月17日,第2版发布日期:2022年5月23日
第3版发布日期:2022年7月11日,第4版发布日期:2022年8月29日
第5版发布日期:2023年4月26日,第6版发布日期:2023年6月26日
第7版发布日期:2023年8月8日,第8版发布日期:2023年8月29日
第9版发布日期:2023年9月18日,第10版发布日期:2023年10月8日
第11版修定于2025年11月12日,第12版本发布于2025年12月20日
最后发布版本2026.1.8
特别鸣谢:勘误修订-亚哈 2025.4.19
本文完,以下内容为附件。
附件1:航空航天模型定义、分类与教育意义
一、航空航天模型的定义
航空模型是一种重于空气的、有特定尺寸和重量限制的模型航空器,可带有或不带有动力,专门用于竞赛、运动、科研或娱乐活动,其核心特征是不可载人。
航天模型则不依赖空气动力产生的升力来克服重力,而是依靠模型火箭发动机的推进力,从发射装置上起飞升空。此类模型主要包括模型火箭和火箭推进滑翔机等类型。
补充说明:模型航空器特指符合尺寸和重量限制、不可载人、不具备垂直与水平位置自行保持飞行功能、不搭载非体育运动任务载荷,且在目视视距内飞行的航空器。
二、我国航空航天模型活动分类体系
国家级竞赛体系
我国国家级航空航天模型竞赛采用金字塔结构,主要由以下几类赛事构成(航模赛事以教育部白名单赛事为主,商业赛事相对较少):
全国航天模型锦标赛
科研类全国航空航天模型锦标赛
全国青少年航空航天模型锦标赛
全国航空航天模型公开赛
“飞向北京-飞向太空”全国青少年航空航天模型教育竞赛
国际代码体系解析
F1、F2、F3及S代码是国际航空运动联合会制定的标准分类代号:
F1:自由飞行类(飞行过程中不受外部操控),如牵引滑翔机(F1H)、活塞式发动机动力飞机(F1P)
F2:线操纵圆周飞行类,如国际级线操纵特技(F2B)、线操纵空战(F2D)
F3:无线电遥控飞行类,如国际级遥控特技(F3A)、国际级遥控直升机特技(F3C)
S:航天模型类,如高度火箭(S1A/2)、载荷火箭(S2/P)
我国主要航模活动项目
- 自由飞行类(F1)
此类模型放飞后与操纵者无任何物理连接,按照预设姿态自由飞行,以留空时间长短为竞赛标准,是研究空气动力学的基础模型类型。根据现行国际规则,允许使用无线电遥控装置仅限于模型回收用途。
主要项目:牵引模型滑翔机(F1A)、橡筋动力飞机(F1B)、活塞式发动机动力飞机(F1C) - 线操纵类(F2)
模型通过钢索与操纵者连接,以操纵者或固定点为圆心作圆周飞行,能够完成竞速、特技、格斗等飞行任务。
主要项目:线操纵竞速(F2A)、线操纵特技(F2B)、编组竞速(F2C)、线操纵空战(F2D) - 无线电遥控类(F3)
操纵者通过遥控器发射无线电信号,控制模型舵面与机构,完成各类飞行任务,是目前技术含量最高的模型类别之一。
主要项目:国际级遥控特技(F3A)、遥控多任务滑翔机(F3B)、国际级遥控直升机特技(F3C) - 第一视角类(F9)
新兴模型运动,采用多电动机动力系统(常见三、四旋翼构型),操纵者通过头戴显示器以第一视角实时操控模型,以竞速为主要竞赛形式。
主要项目:多轴无人机竞速(F9U)、多轴无人机足球(F9A)、多轴无人机任务飞行(F9R) - 其他类别
国际航联还定义了以下模型类型:
比例模型类(F4):以真实航空器为原型按比例缩制的像真模型
遥控电动模型类(F5):以电动机为动力的模型类别
遥控浮空器类(F7):轻于空气的航空器,包括遥控热气球(F7A)和遥控飞艇(F7B)
三、航空航天模型的教育意义
航空航天模型运动是融合体育、教育与科技的综合性科技体育项目,具有多重教育价值。
综合素质培养
提升航空航天科学素养,培养责任心和毅力
强化团队合作精神与科学创新能力
锻炼逻辑思维与判断能力,增强成就感与自信心
树立航空报国的远大理想
知识体系构建
通过航模活动,学习者能够系统掌握:
飞行原理与空气动力学基础
材料与结构知识
航空发动机原理
无线电遥控技术
气象学相关知识
航模学习具有跨学科、理论与实践紧密结合的特点,有效弥补了专业学习内容单一的不足。爱好者通过反复的设计、制作与试飞过程,建立起系统化的工程思维。
发展前景
作为国家体育总局正式批准的军事体育项目,航模运动:
深受青少年喜爱,促进“德、智、体、美、劳”全面发展
已纳入全运会竞赛项目
成为报考航空航天类大学的加分项目
为青少年综合素质培养提供了优质平台
学习笔记
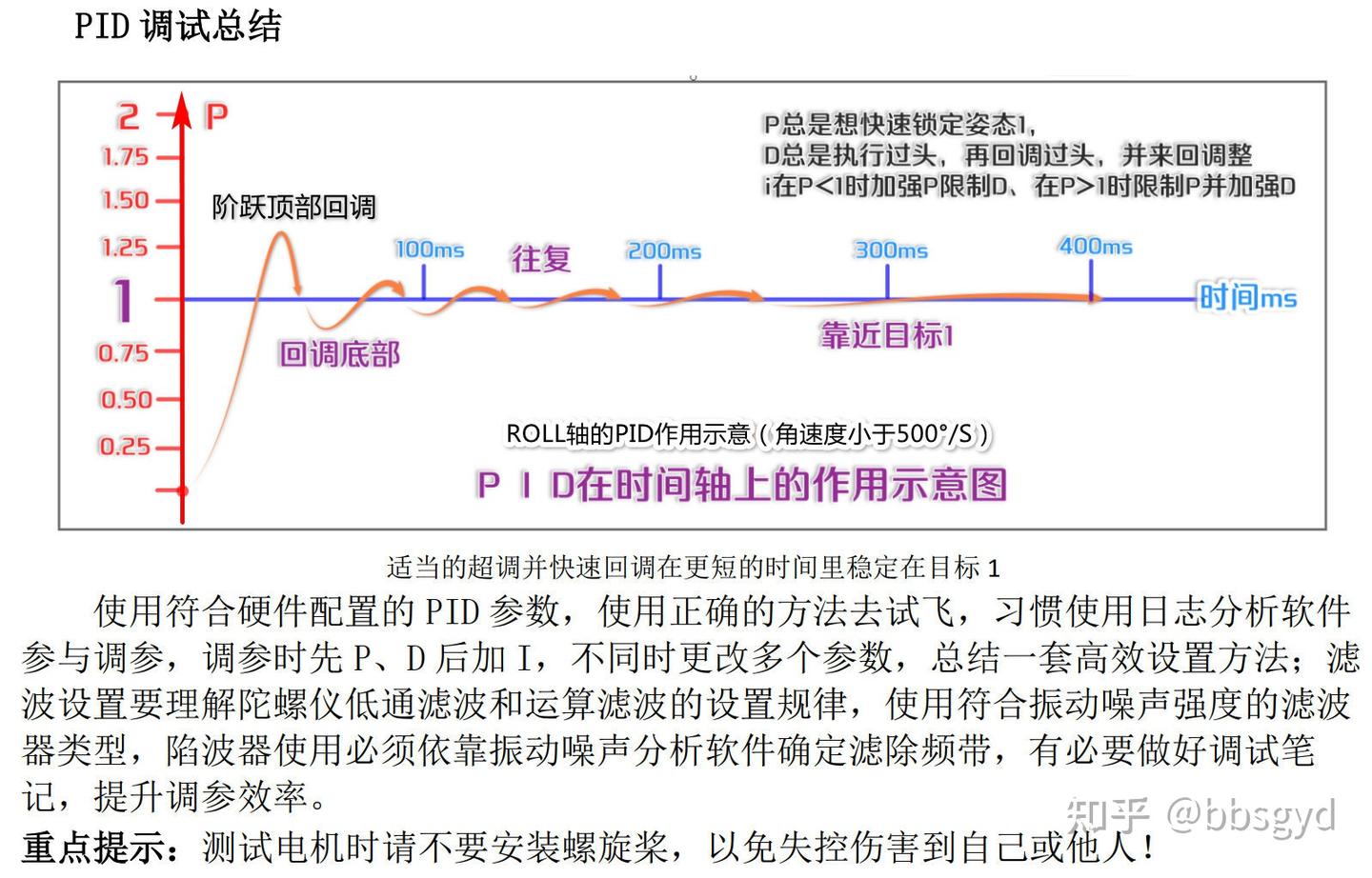
GPS连接飞控笔记
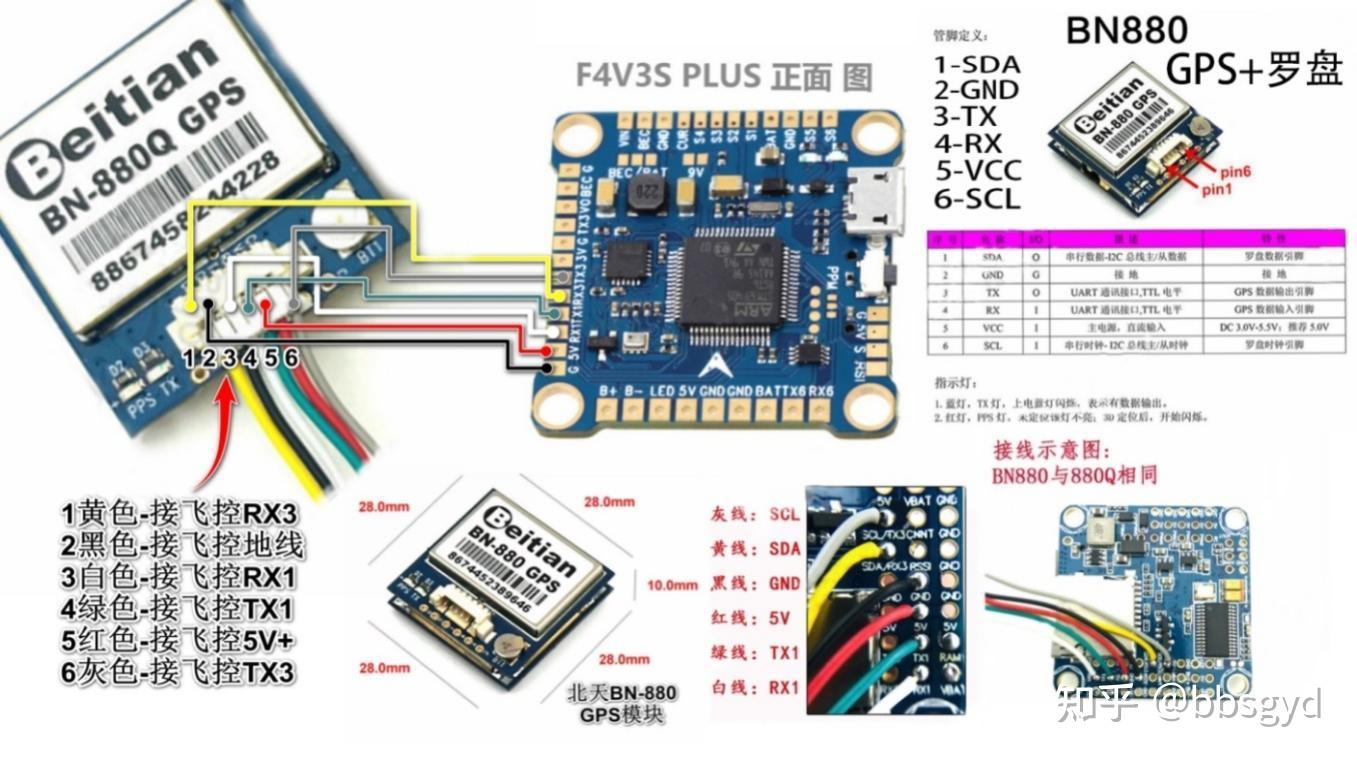
北天BN-880 GPS接收机单元(带指南针)
其他飞控电路应用