
小米手环 10 被逆向,顺手跑了个 Doom、 树莓派 Zero 变身胶片风相机、开源的扫地机器人|DF创客周刊(第176期)
社区公众号记录每周值得分享的创客相关内容,每周五发布~
欢迎投稿或推荐相关内容。
投稿邮箱:MakerCommunity@outlook.com
小米手环 10 被逆向,顺手跑了个 Doom
作者又对小米手环下手了。
这位德国硬件黑客从小米手环 8一路拆到现在,最新目标是手环 10 里那颗恒玄 BES2700iMP,内部代号 BEST1503——一颗没有公开 SDK 的 SoC。

没文档怎么搞?他找到了同系列芯片 BEST1306 的泄露 SDK(来自一个音频开发套件),靠交叉比对两颗芯片的寄存器和外设映射,硬是拼出了一套能用的 BEST1503 开发环境。SWD 调试接口在 PCB 背面的测试焊盘上,焊上飞线连编程器就行。虽然说谈不上优雅,但是跑通了!
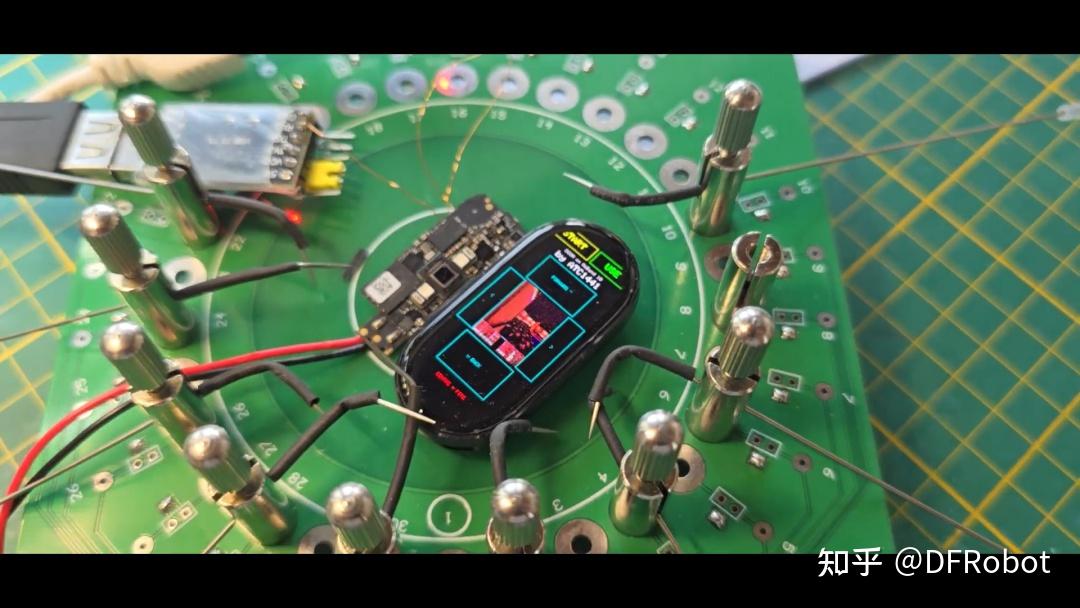
最终成果:Doom 在手环的 212x520 AMOLED 屏上运行,触屏操控移动和射击。这套从零拼出来的 SDK让小米手环 9 和 10 变成了可以自由编程的嵌入式平台。
 https://www.zhihu.com/video/2053416429010137983
https://www.zhihu.com/video/2053416429010137983代码和工具链都开源在 GitHub:https://github.com/atc1441/MiBand10-BES2700iMP-BEST1503-Hacking
来源:https://hackaday.com/2026/06/21/hacking-the-mi-band-10-smart-band-and-its-bestechnic-soc/
树莓派 Zero 变身胶片风相机
作者用树莓派 Zero 2 W 加 Camera Module 3 攒了一台小相机,外观走柯达一次性相机那种塑料玩具风。全机没有定制 PCB,纯靠现成模块 + 3D 打印壳组装。


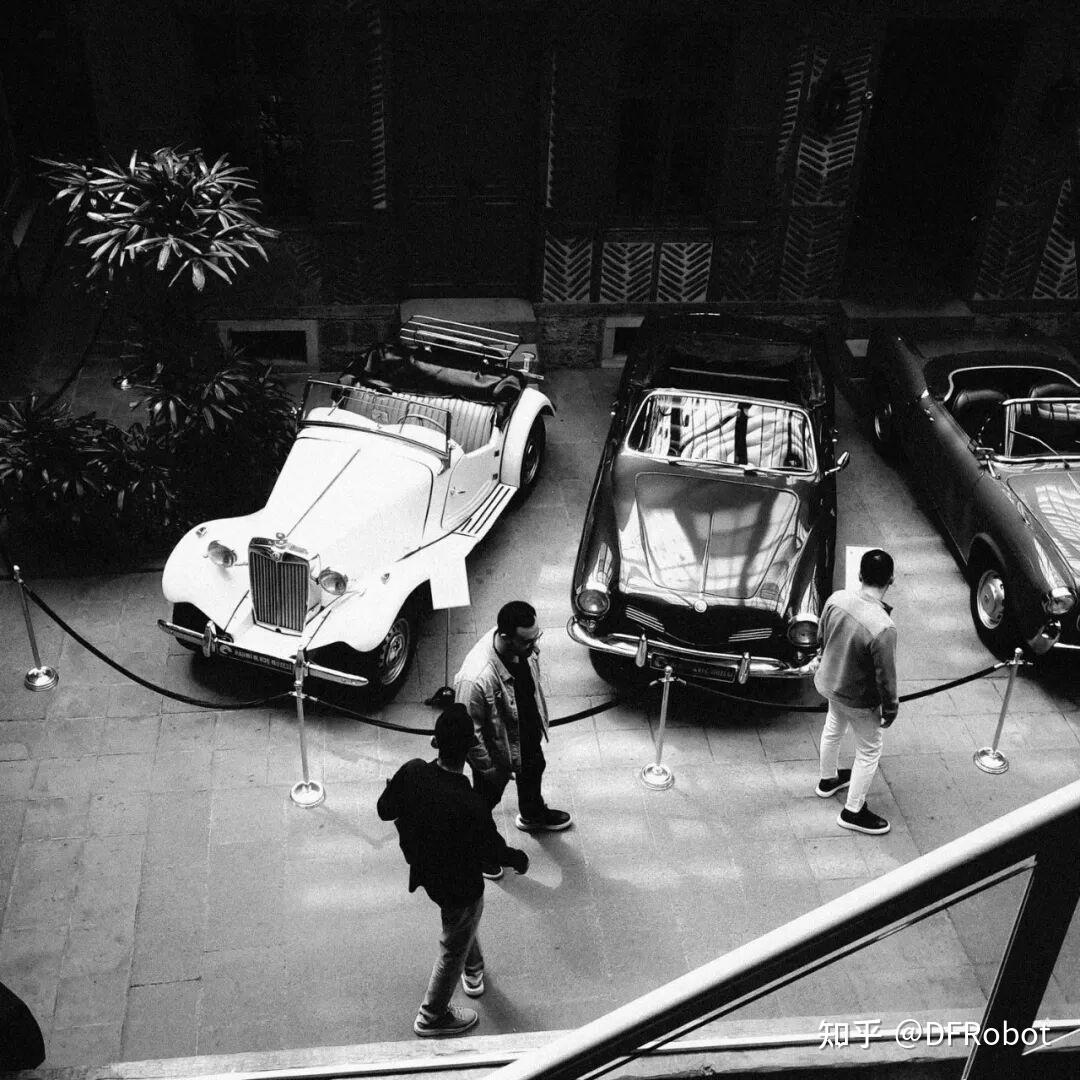
拍照分辨率 2592×2592,自动对焦,8 种滤镜。取景器是一块 1.3 英寸 240×240 的小 LCD,预览大概 15-20 帧——有点顿,但按快门前看个构图是没问题的。14500 电池供电,支持USB-C 充电,能拍 70-80 分钟。传照片靠相机自己开 Wi-Fi 热点,手机连上去下载。
放几张拍的照片给大家感受一下:



BOM、CAD 文件、组装教程全在 GitHub 仓库里。不用画板子不用写驱动,会焊线会装 3D 打印件就能复刻。
仓库地址:https://github.com/dorukkumkumoglu/optocamzero
来源:https://www.cnx-software.com/2026/06/22/optocam-zero-a-raspberry-pi-zero-2-w-based-diy-digital-camera/
30 个键的极简 Cyberdeck
Cyberdeck 这个品类一直在两头拉扯:一边想堆功能,一边想压体积。作者选了极端路线——树莓派 Zero 2W 配 Gherkin 30% 键盘套件,搭了一台零件很少的便携终端。

Gherkin 只有 30 个键,宽度刚好和 7 英寸的微雪触摸屏齐平,视觉上很协调。供电是一块 4000mAh 锂电池加 Adafruit Powerboost 1000 充电模块,外壳 3D 打印。Pi Zero 2W 性能有限,但跑终端、写脚本、SSH 管理服务器这些事够用了。
 https://www.zhihu.com/video/2053416826755929560
https://www.zhihu.com/video/205341682675592956030 个键打字当然需要适应。大量操作靠层切换和组合键完成,上手曲线不低,但这也是这台机器和作者的态度——每多一个零件都问自己一句"真的需要吗"。
Instructables 上有完整教程和物料清单,感兴趣的小伙伴可以试试。
来源:https://www.instructables.com/Ultra-Minimal-Cyberdeck/
G-Shock 的开源移植
Casio F-91W 的替换 PCB 项目 Sensor Watch 搞了好几年,现在轮到 G-Shock 了。
作者基于 Sensor Watch 的架构,给经典的 DW-5600 做了一块叫 Second Movement 的替换板,直接塞进原壳就能用。

光是能走时就已经挺厉害了——毕竟是给商业手表画的替代 PCB。但作者显然不满足于此:计步器、月相、日出日落、温度计、Blackjack、Wordle,能往段码屏上塞的功能他塞了个遍。没有表也能玩,他做了个网页模拟器,还有一个 LCD 段码映射的可视化工具,点哪个段亮哪个,做过段码屏开发的应该懂这东西多实用。
固件和硬件设计全部开源在 GitHub。想搞实体板子的可以去 Discord 排队等下一批产。

来源:https://hackaday.com/2026/06/23/a-custom-pcb-for-the-casio-g-shock/
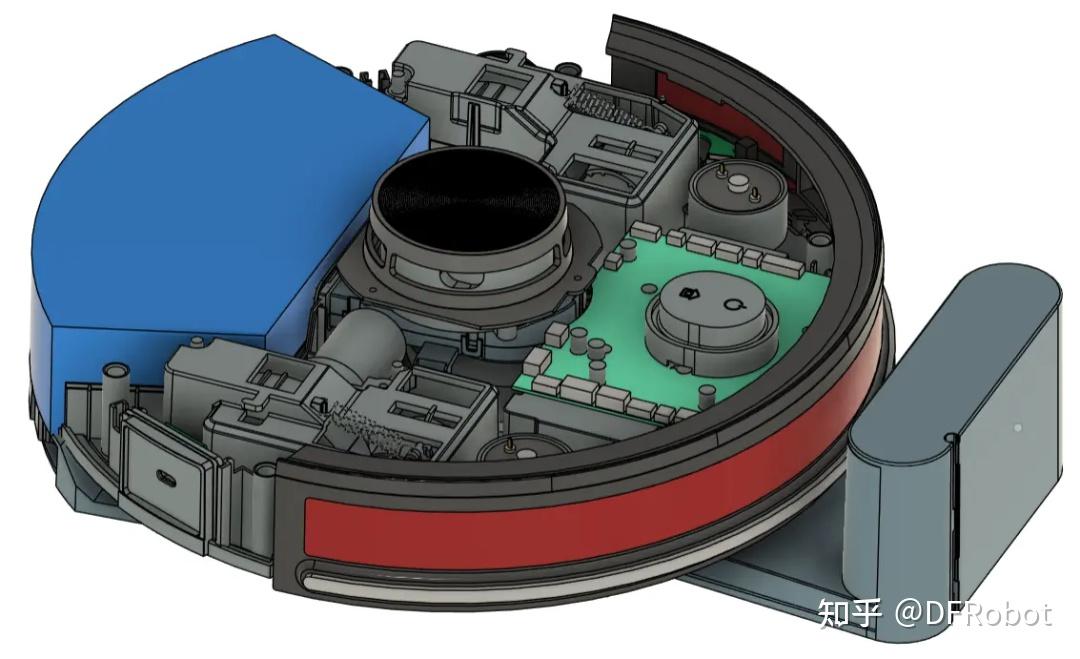
Oomwoo:从第一行代码就开源的扫地机器人
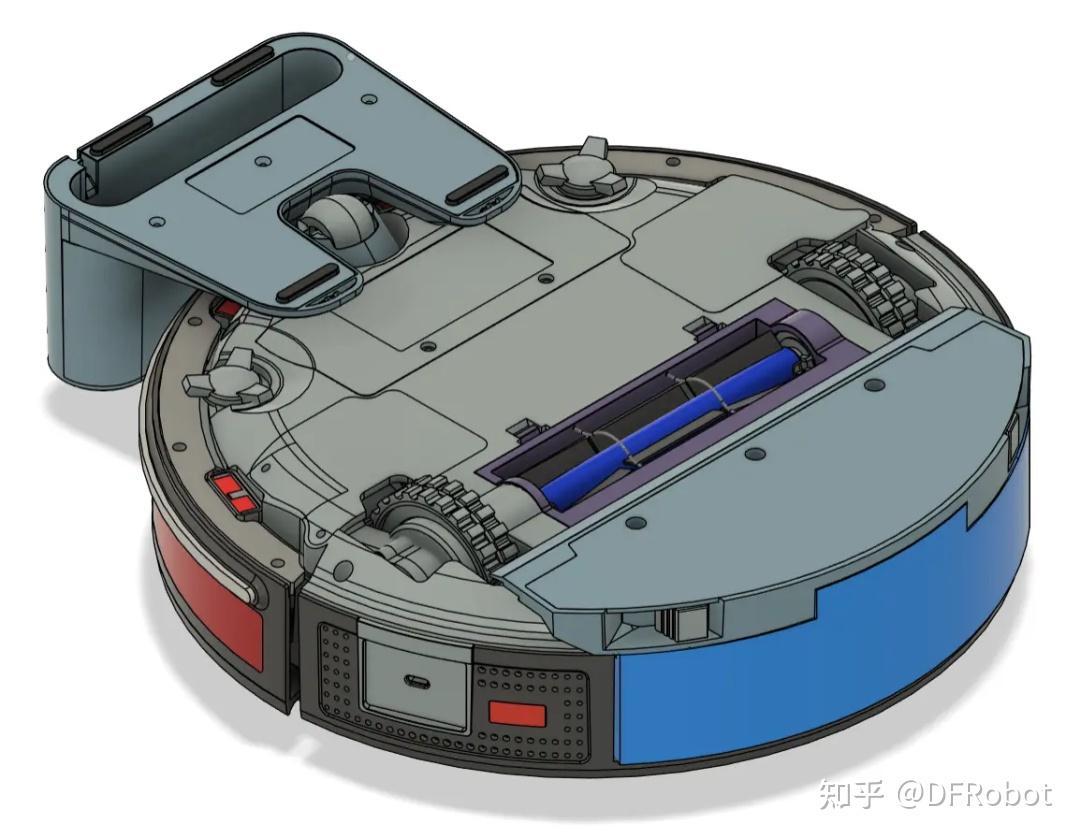
市面上扫地机器人不便宜,而且几乎都是封闭系统。Maker's Pet 团队发起的 Oomwoo 项目思路不同:树莓派 + ROS 2 + 2D LiDAR + 3D 打印件,从零造一台完全开源的扫地机器人。
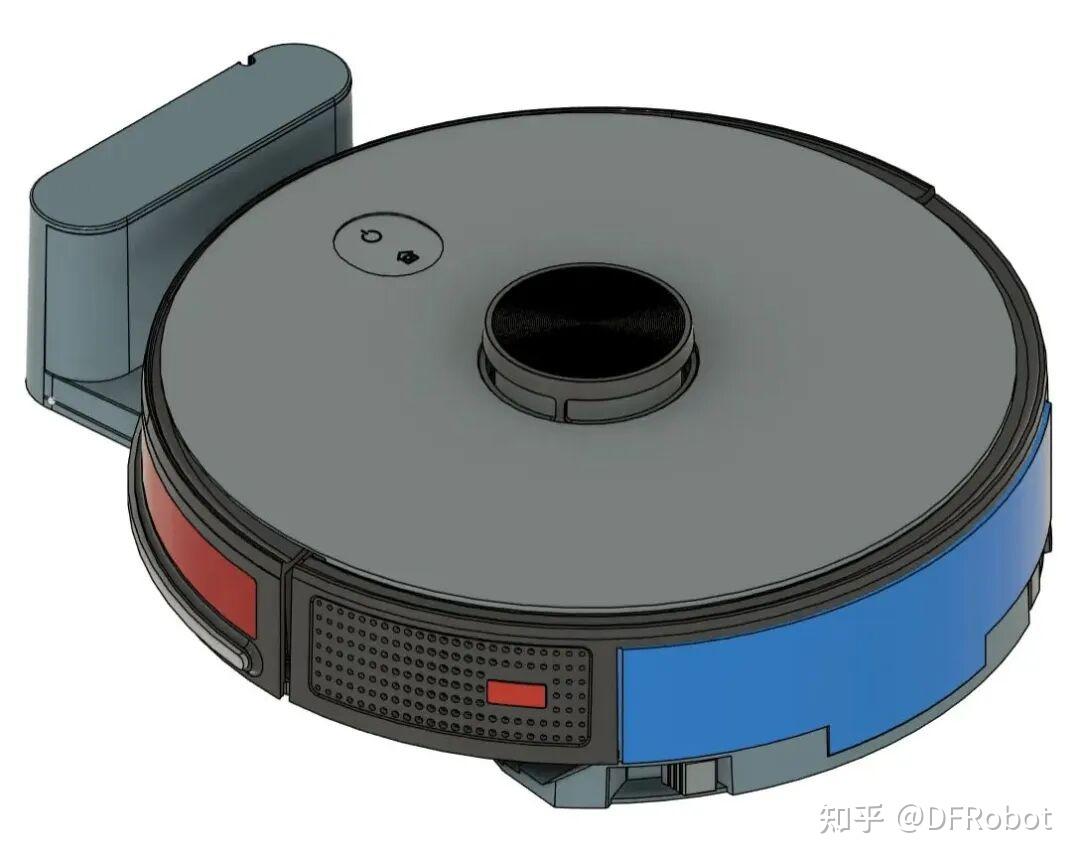
BOM 清单、3D 打印文件、ROS 2 包、固件、电机驱动 PCB、搭建文档,从第一个 commit 就在 GitHub 上公开。和 Home Assistant 原生集成,纯本地运行,不依赖云服务。
项目的名字 Oomwoo 其实是个旋转对称词,转 180 度读起来一样,挺有意思的。
项目按模块化组织,不同贡献者可以认领不同模块并行推进。目前还在早期阶段,但架构和文档质量都不错。对想学 ROS 2 和机器人自主导航的人来说,这个项目可以拿来练手试试!
来源:https://makerspet.com/blog/building-an-open-source-robot-vacuum-meet-oomwoo/
周刊首发于DF创客社区