4D毫米波雷达是应对L2新国标的必备配置吗?
出品|汽车电子与软件
前言
近期,国标《智能网联汽车 组合驾驶辅助系统安全要求》(L2新国标)报批稿正式落地,标志着国内L2级组合驾驶辅助系统将迎来最严苛的安全合规升级。相较于旧有规范,新版国标彻底重构了L2系统的安全底线,不再局限于基础功能可用性,而是聚焦真实复杂场景感知、极端工况容错、驾驶员脱离应对、多目标交互安全四大核心维度,大幅抬高了感知系统的性能门槛。
新规发布后,行业内形成了普遍热议:临时施工区域、侧翻车辆遮挡、隧道光影突变、雨雾低能见度、鬼探头横穿等高频复杂场景,成为L2系统合规的必测项。而传统3D毫米波雷达+纯视觉的经典感知方案,在多目标叠加、弱特征障碍物、恶劣天气等场景下的感知短板被彻底暴露。由此,不少观点认为,具备三维空间成像与高密度点云输出能力的4D毫米波雷达,将成为车企通过L2新国标认证的"硬性标配"。
但事实果真如此吗?本文将深度拆解L2新国标报批稿的核心感知场景与试验要求,结合4D毫米波雷达的技术优势、替代感知方案的合规可行性,客观论证4D毫米波雷达的真实合规价值,厘清行业认知误区,明确其在新国标体系下的定位------增效利器而非强制标配。
01
深度拆解L2新国标
本次L2新国标报批稿的核心变革,是将"场景化安全验证"纳入强制考核体系,在附录C的预期功能安全试验章节中,明确了21项场地试验场景及道路试验规范,彻底告别了以往"直线跟车、常规换道"的简单测试模式。其中,绝大多数高难度考核场景,均对车辆感知系统的立体识别能力、小目标探测能力、恶劣环境鲁棒性、多目标抗干扰能力提出了颠覆性要求,具体可分为四大核心场景类别。
1.1 道路设施异形障碍场景
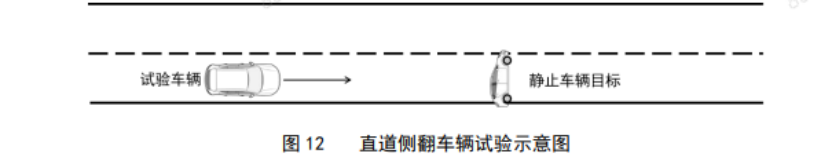
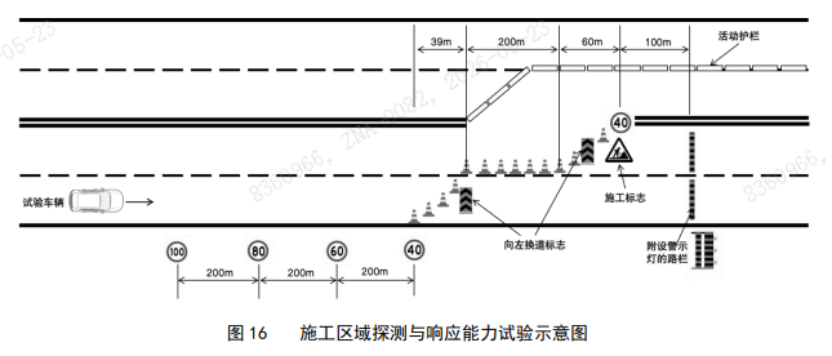
新国标新增多项道路施工、异形障碍专项试验,包括日间/夜间临时施工区域通行、施工改道、侧翻车辆避让等场景。试验工况明确要求:车辆需识别斜列交通锥、隔离墩、防撞桶、横向施工路栏等低特征障碍物,同时需应对车道内静止侧翻车辆、斜置故障车等非常规目标。
这类场景的核心难点在于,传统感知系统易将低矮、零散、异形障碍物判定为路面杂波直接过滤,或无法区分高空路牌、天桥与路面障碍物,导致无预警通行、近距离急刹甚至直接碰撞。新国标明确规定,此类场景下车辆需提前减速、规避障碍,未干预碰撞速度不得超过10km/h,对感知的精准度和提前量要求极高。
1.2 多目标遮挡交互场景
这是新国标最具行业颠覆性的考核内容,新增日间/夜间儿童、自行车被车辆遮挡横穿试验,以及静态多目标叠加交互试验。典型工况为:相邻车道静止车辆遮挡行人、非机动车,目标突然横穿车道,车辆需在无完整视野的情况下完成风险识别与避险。
同时规范要求,系统需精准区分车道内行驶车辆、路边静止行人、远处非机动车的层级关系,避免多目标叠加时出现感知混淆、目标丢失。该场景直击传统感知方案最大痛点:纯视觉易受遮挡、光影干扰,传统毫米波雷达无高度维度,无法区分目标层级,极易引发鬼探头事故。
1.3 复杂环境光影与天气场景
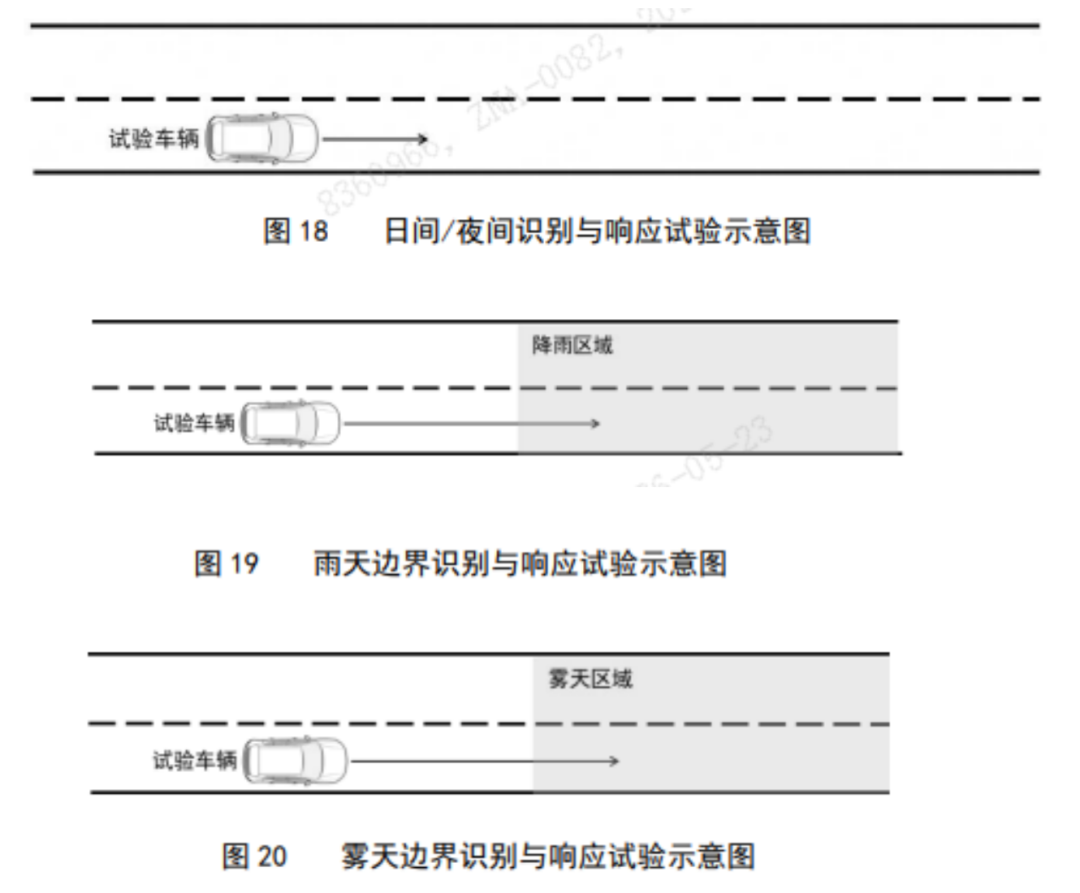
新国标将全天候感知能力纳入强制考核,新增隧道光影突变、夜间低光照、雨天、雾天四大恶劣工况试验。其中隧道场景要求车辆应对进出隧道的瞬时明暗切换,精准识别隧道内斜置障碍物;雨雾场景则要求系统在能见度大幅衰减、画面噪点激增的情况下,稳定探测车道内静止、低速障碍物。
新规明确,无论光照、天气条件如何,感知系统不得出现目标漏检、误检、延迟响应,彻底否定了传统方案"晴天可用、恶劣天气失效"的容错空间,对感知硬件的环境适应性提出刚性要求。
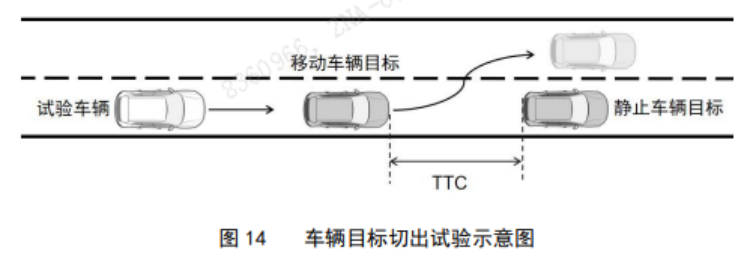
1.4 动态紧急工况场景
在基础动态跟车基础上,新国标新增夜间前车紧急制动、高速多目标并行制动等严苛工况,要求系统精准识别前车瞬时减速、突发制动行为,同时规避相邻车道车辆切入、切出带来的碰撞风险。试验中,前车需在1秒内达到5m/s²的高减速度,模拟高速突发险情,考验感知系统的动态响应速度与速度测量精度。
综合来看,L2新国标的核心升级逻辑,是从"功能可用"转向"场景安全",所有新增考核场景的核心瓶颈,均集中在感知系统的立体空间建模、小目标识别、抗干扰、全天候稳定性四大能力上,这也为4D毫米波雷达的应用提供了核心场景支撑。
02
4D毫米波雷达
的技术优势
在行业讨论中,4D毫米波雷达被视作新国标"最优解",核心原因是其完美匹配了新规新增的高难度感知场景需求,补齐了传统3D雷达与纯视觉方案的核心短板。相较于传统感知硬件,4D毫米波雷达在硬件架构与算法能力上实现了全方位升级,形成四大不可替代的技术优势。

2.1 新增高度维度,实现真正立体空间感知
传统3D毫米波雷达仅能探测距离、水平方位角、速度三维信息,无垂直高度感知能力,属于"平面感知",无法区分路面障碍物与高空无效目标,也不能识别低矮异形障碍。而4D毫米波雷达在传统三维基础上新增俯仰角(高度)维度,可输出X、Y、Z三维坐标+径向速度的四维点云数据,实现对道路环境的立体建模。
这一特性完美适配新国标异形障碍场景:可精准区分交通锥、隔离墩、侧翻车辆等路面障碍物,过滤天桥、路牌、龙门架等高空干扰目标,彻底解决传统雷达"误判空障碍、漏判低障碍"的痛点,满足施工区域、故障车避让的合规要求。
2.2 超高分辨率与密集点云,强化小目标识别能力
4D毫米波雷达采用大带宽设计(76-81GHz频段,带宽4GHz),远高于传统3D雷达的1GHz带宽,水平角分辨率提升至0.5-1°,点云密度是传统雷达的8倍以上。高密度点云可勾勒出行人、自行车、小型障碍物的轮廓特征,实现目标精准分类,而非传统雷达的"点状模糊探测"。
针对新国标重点考核的鬼探头、遮挡横穿场景,4D雷达可通过残余点云感知遮挡物后方的目标运动趋势,提前预判风险;同时能精准识别儿童、非机动车等小尺寸弱势交通参与者,解决传统方案小目标漏检难题,完美匹配多目标叠加交互场景的考核要求。
2.3 全天候超强鲁棒性,适配恶劣工况考核
继承了毫米波雷达全天候工作的天然优势,4D毫米波雷达不受光照、雨雪、雾霾、沙尘影响,可在夜间、隧道光影突变、暴雨、浓雾等极端环境下稳定输出感知数据,弥补了纯视觉摄像头对光线极度敏感、恶劣天气画质衰减的短板。
在新国标雨雾、夜间、隧道专项试验中,4D雷达可稳定探测障碍物位置、速度、高度信息,无画面噪点、无目标丢失,保障系统在全工况下的感知稳定性,是目前全天候感知能力最强的中端传感器。
2.4 高精度速度测量,适配动态紧急避险场景
4D毫米波雷达具备实时高精度径向速度测量能力,可精准捕捉前车瞬时减速、紧急制动的速度变化,响应速度远快于视觉方案的图像算法识别。针对新国标夜间前车高减速度紧急制动场景,4D雷达可提前预判风险,辅助系统快速完成减速、避让操作,有效降低追尾风险。
同时,其抗多目标干扰能力更强,可在多车并行、密集车流场景下,精准区分不同目标的运动状态,避免动态场景下的误制动、漏制动,满足新规动态交互安全要求。
综上,4D毫米波雷达的技术特性与L2新国标新增的所有高难度感知场景高度契合,能够大幅降低L2系统的感知失效风险,提升整车安全冗余,这也是其被行业普遍推崇的核心原因。但适配性强≠必备性,从法规合规层面来看,4D毫米波雷达并非唯一解。
03
4D到底该不该选?
结合L2新国标报批稿全文及合规逻辑来看,新规仅明确了场景安全要求、感知性能指标、试验通过标准,并未对感知硬件的品类、数量、型号做出任何强制性规定。简单来说,国标只看"最终试验结果是否达标",不限制"采用何种硬件方案达标"。除4D毫米波雷达外,纯视觉高阶方案、激光雷达方案均可满足新规合规要求。

3.1 高阶纯视觉方案
当前主流高阶纯视觉方案(如8MP高清摄像头+Transformer大模型+时序感知算法),通过硬件升级与算法迭代,可弥补传统视觉方案的短板,适配新国标场景要求。超高像素摄像头可捕捉小目标、远距离目标细节,时序算法可预判遮挡目标运动趋势,多摄像头融合可实现立体空间感知,通过算法补偿规避光影、天气干扰问题。
在新国标场地试验中,成熟的高阶纯视觉方案可顺利通过施工区域避让、鬼探头、隧道通行等场景测试,完全满足合规要求。其核心短板在于极端恶劣天气下的稳定性略逊于4D雷达,但通过多帧融合、AI降噪算法优化,可将风险控制在法规允许范围内。
3.2 激光雷达方案
激光雷达具备超高精度三维建模能力,点云密度、空间分辨率、目标识别精度均优于4D毫米波雷达,可轻松覆盖新国标所有复杂场景考核。无论是异形障碍物、遮挡鬼探头,还是雨雾光影极端工况,激光雷达均可实现精准、稳定的感知输出,安全冗余远超法规最低要求。
对于搭载激光雷达的车型,L2新国标合规几乎不存在技术壁垒,其唯一短板在于硬件成本高、量产适配难度大,仅适用于中高端车型,无法覆盖性价比车型市场。
3.3 感知方案核心对比与选型逻辑
从合规可行性来看,4D毫米波雷达、高阶纯视觉、激光雷达方案均可满足L2新国标要求,三者的核心差异集中在成本、安全冗余、场景适应性三个维度,这也是车企选型的核心依据。
激光雷达方案感知性能最强、冗余最高,但成本昂贵、对整车架构要求高,主打高端车型;高阶纯视觉方案成本可控、硬件简洁,但极端天气稳定性偏弱,依赖算法迭代能力,适合主打性价比的主流车型;4D毫米波雷达则介于两者之间,成本远低于激光雷达,全天候稳定性优于纯视觉,感知精度优于传统雷达,是性价比最高的合规增效方案。
因此,车企是否搭载4D毫米波雷达,并非法规强制要求,而是基于产品定位、成本控制、安全冗余的市场化决策:高端车型可搭载激光雷达实现超规安全,中端车型优先选择4D雷达平衡性能与成本,入门车型可通过高阶纯视觉方案满足基础合规。
04
理性看待4D雷
达的合规价值
L2新国标的落地,本质上是倒逼行业告别"功能堆砌式"辅助驾驶,走向"场景安全式"辅助驾驶,核心提升的是系统感知的可靠性与容错性。4D毫米波雷达凭借其立体感知、全天候稳定、高性价比的核心优势,成为新规下车企升级感知系统的最优性价比选择,能够显著提升L2系统的场景适应性与安全上限,有效降低合规测试难度。
但必须明确的是,最优选择≠必备选择。新国标秉持"结果导向"的合规逻辑,不绑定任何单一硬件方案。只要整车感知系统能够通过全部场景试验、满足安全指标,无论采用纯视觉、4D毫米波雷达还是激光雷达方案,均符合法规要求。
未来行业的感知方案竞争,不会是4D毫米波雷达的"单边垄断",而是不同车型、不同定位的方案分层化:高端车型以激光雷达打造超高安全冗余,中端车型以4D毫米波雷达实现性能与成本平衡,入门车型以高阶纯视觉保障基础合规。对于车企而言,无需盲目跟风搭载4D雷达,只需结合自身产品定位,匹配最优感知方案,即可顺利应对L2新国标合规要求。