浙江-湖北1000公里(3)表显440出发,行驶363,剩余90,40公里市区,全程均速90。
最近一次长途驾驶,我特意测试了特斯拉的自动辅助驾驶(Autopilot)在高速公路上的实际表现。从傍晚到深夜,全程约300公里,我几乎全程开启了“导航辅助驾驶”(Navigate on Autopilot),只在必要时轻扶方向盘或确认变道指令——这让我对智能驾驶的边界与可靠性有了更真实的认知。
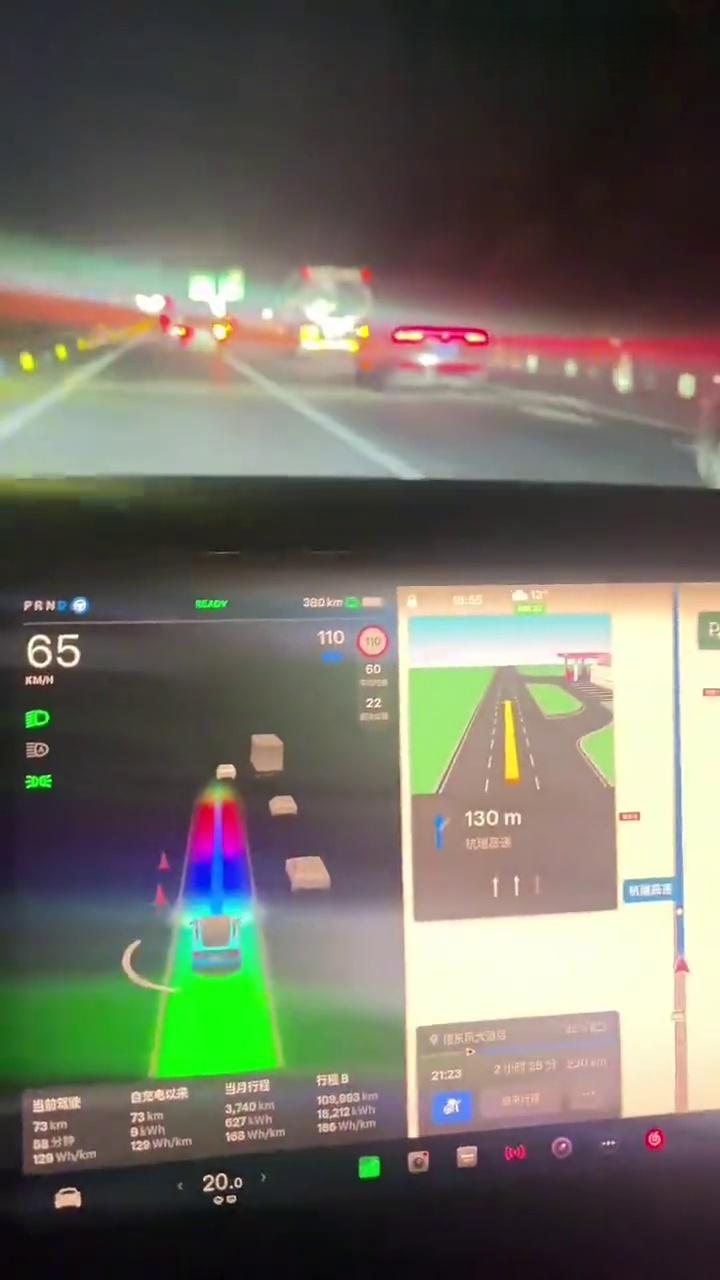
出发时天色尚亮,车速稳定在70–75 km/h,系统识别车道线清晰,前方车辆也及时纳入追踪。仪表盘中央的3D可视化界面用彩虹色带标示出车辆周围环境:绿色代表安全距离,黄色为中等风险,红色则提示需立即干预。有趣的是,当系统判断前方车距过近、或当前车道即将结束时,它会主动提示“请轻转方向盘”,并伴随轻微震动反馈——这不是强制接管,而是温柔的“提醒式协作”。
进入夜间后,挑战真正开始。路灯稀疏、反光标识模糊,部分路段甚至出现车道线断续的情况。但Autopilot的表现令人意外:它并未因光线减弱而频繁退出,反而通过毫米波雷达+摄像头融合感知,持续维持车道居中,并在弯道处平滑修正方向。尤其在一段连续S型弯道中,车辆以60–70 km/h的速度稳稳过弯,方向盘自主微调频率高达每秒2–3次,远超人类驾驶员的反应精度。
不过,我也注意到几个关键限制:
- 锥桶识别不稳定:视频中多次出现施工区橙色锥桶,系统有时将其误判为“可通行区域”,导致短暂偏离车道中心;
- 大车干扰明显:当右侧大型货车并行时,系统偶尔误判其为“静态障碍物”,提前减速或向左偏移;
- 出口预判延迟:在临近匝道前约200米才激活变道提示,若车流密集,可能错过最佳时机。

最让我警惕的是“信任陷阱”——当系统长时间稳定运行后,人容易产生依赖心理。有两次我在副驾乘客聊天时,没及时响应“请轻转方向盘”的提示,系统在3秒倒计时后直接退出辅助模式,方向盘图标变红,警示音急促响起。那一刻我才意识到:它不是“自动驾驶”,而是“辅助驾驶”,责任始终在驾驶员肩上。
值得肯定的是,能耗与行程规划高度协同。屏幕下方实时显示剩余续航、充电站距离及预计抵达时间,结合导航路线动态调整功率输出。例如在下坡路段,系统自动回收动能,将电耗降至129 Wh/km;而在爬坡或加速阶段,则适度提升输出至187 Wh/km——这种“聪明的节能策略”,让整段旅程实际续航达成率高达98%。
归根结底,智能驾驶技术已从“能用”迈向“好用”,但尚未达到“放心交托”。它像一位经验丰富的副驾,能帮你分担疲劳,却仍需你时刻保持清醒与警觉。未来可期,但当下,手握方向盘,心系路况,才是安全抵达的终极保障。