扫地机器人有推荐的吗,用过的老哥们说一说。?
4款热门扫地机器人硬核实测:避障、拖地、维护全扒皮
哈喽,大家好,我是 @微醺的工程狗,一个兴趣使然的家电爱好者。
前段时间,我问大家想看什么东西的评测,兄弟们投票给了扫地机器人,于是微醺我又麻溜地下单开测了~

当然,本次实测的四位嘉宾也都是小伙伴们投票选出来的。
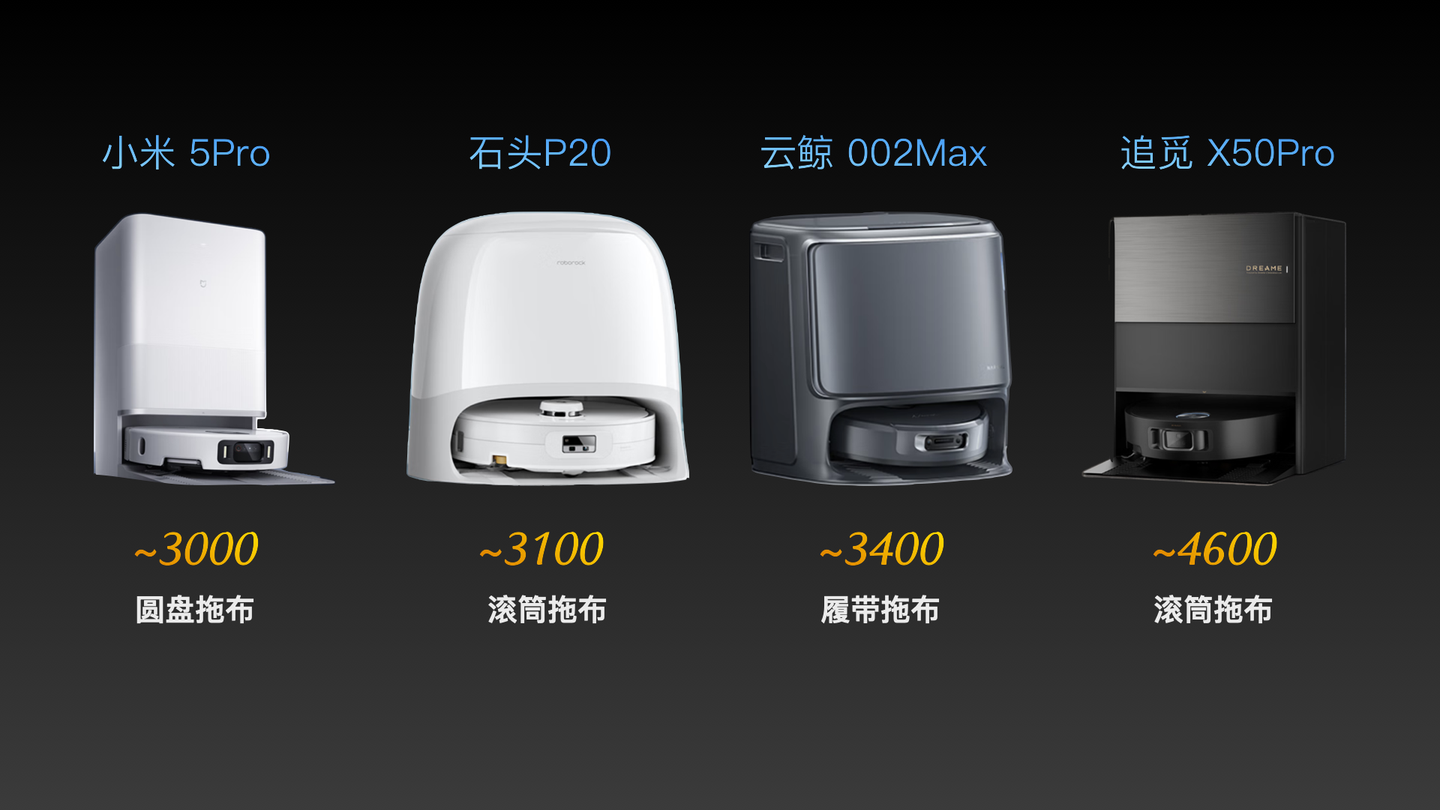
- 小米5Pro,米家的亲儿子,自称米系最强避障,考虑到老米的汽车现在也干得如火如荼,热火朝天,那么,或许,它的扫地机器人也能从汽车那里继承一丢丢的自动驾驶的算法,用来优化避障。但它的拖布配置还是传统的圆盘式,在处理湿垃圾时,可能会有些力不从心。
- 石头P20滚筒版,基础版的避障和配置,搭配一个滚筒拖布,应该是石头试水滚筒拖地的前瞻版本。
- 云鲸逍遥002MAX,云鲸的旗舰机型,拖布为履带式,理论上有效清洁面积比滚筒的要大。
- 追觅X50Pro滚筒版,追觅这机器有点超预算,但已经是他家最便宜的滚筒版机器人了…你卖这么贵,要是实测表现再不好,我可要骂人了。
OK,废话不多说,我们直接开测~!
一. 避障
关于扫地机器人,非常反直觉的一点,就是它最重要的能力其实不是清洁力,而是避障能力。 它关系到机器人是不是会经常被纸巾,数据线等等各种杂物困住,不仅会导致清洁工作失败,还需要人类去解救它,甚至可能引发二次事故。
所以,我们要测的第一个项目就是避障。 在大约10平米的小空间里面,我安排了10个障碍物:

- 首先,是最基础的袜子和拖鞋,容易被机器人推到角落里找不见。
- 然后是体重称,经常能看到它,与老式的机器人相爱相杀的场景。
- 细腿小茶几,超细的桌腿和中心细条支架对机器人的感知力是不小的挑战。
- 折叠椅,椅子的底部金属横梁会反光,容易干扰机器人的视觉算法,同时高度又与门槛接近,可能被机器人识别成需要跨越的对象,从而不断发起冲击。
- 垃圾桶,半透明略带反光材质,容易误导机器人的雷达和视觉识别。
- 餐巾纸,机器人吸入之后很容易卡住主刷,导致清洁中断,平铺状态更是加大了难度。
- 地上的数据线,曾经是扫地机器人地狱级的噩梦,日常生活中,出现的频率又高,所以也是各大厂商研发的重点攻克对象,现在的旗舰机型,基本上都能比较好地避开数据线了。
- 玩具小戒指,模拟一些掉在地上的小饰品、小工具啥的,容易卡在机器人底盘和刷头上,被推着到处跑,如果推的是尖锐物品的话,就肯定会划伤地面和拖布了,加上尺寸又小,识别难度也不简单。
- 半透明的塑料袋,而且是平铺的,这个绝对是地狱级的难度,应该没有谁能挑战成功。
1. 小米5Pro
测试正式开始,首先出场的是自称“米家最强”的小米5Pro。

出门就把袜子顶走了,还从塑料袋上面碾了过去,一路横冲直撞,又拉走了数据线,接着又从餐巾纸上面碾过去,一通操作直接给我干懵逼了,这玩意是来捣蛋的还是来扫地的?

在搞了一通破坏之后,它似乎才正式开始扫地。
- 先是稍微刮了几下茶几,影响不大,但成功绕开了玩具戒指。
- 不过毫无意外地没有识别到塑料袋,把塑料袋吃进去了。
- 对于体重称的识别和绕行还算不错,垃圾桶也基本成功绕过了,拖鞋也没啥问题。
- 餐巾纸应该没识别到,没有躲避行为,最终也是吃进去了。
- 我以为这就已经结束了,结果,它又跟椅子杠起来了….
这个表现就敢号称米家最强… 那老米其他型号的避障得拉成什么样啊…
考虑到这极其拉跨的表现有可能是多次巧合叠加的小概率事件,因此,我给老米重新安排了一次实验。

这次,它一开始没有横冲直撞了,但是刮到了小玩具,又跟数据线玩缠绕,顶撞体重称,塑料袋和餐巾纸也是照吃不误,依然是极致的拉垮,很难想象这是一个在做智能驾驶的企业搞出来的机器人避障算法…
2. 石头P20活水版
接下来出场的是石头P20活水版。

- 它先是碰到了餐巾纸,然后在绕过袜子时把塑料袋吃进去了。
- 在遇到数据线时,表现得非常谨慎,虽然成功绕过了,但躲得非常远,清洁覆盖率比较低。
- 半透明的垃圾桶似乎完全没识别到,直直地就撞上去了。
- 再然后它似乎看到了地上的小玩具,稍微减速了一下,但最后还是决定不绕行,直接冲上去了。
作为不以避障为核心竞争力的基础版机型,有这个表现算勉勉强强,无功无过吧。
3. 云鲸002MAX
下一位出场的是云鲸002MAX。

- 出门就识别到了餐具纸,成功绕过去了。
- 茶几也识别得还可以,但是玩具戒指似乎完全没看到,直接压过去了。
- 塑料袋也完全没看到,直接吃进去。
- 数据线识别到了,而且策略非常激进,来了一套极限贴边,清洁覆盖率极高。
- 绕行垃圾桶的时候,轻微触碰了一下,影响不大。
- 绕行餐巾纸的时候也轻微碰一下,稍微有点惊险。
- 再次经过数据线时,激进的贴边策略,导致它轻微触碰了一下数据线,也有点危险。
总得来看,云鲸的避障能力还是非常优秀的,除了小玩具和塑料袋没识别到,其他物品都成功识别了。 但绕行策略非常激进,好处是清洁覆盖率高,坏处是风险也随之提升。
另外云鲸还有一个特点,它在遇到障碍物时,没有其他机型都有的后撤确认这个动作,而是直接采取行动,也不知道是对自己的识别能力极度自信,还是算法过于激进,这使得云鲸的清扫速度也比另外三台快了大约50%~100%。
4. 追觅X50Pro
最后出场的,是最贵的追觅X50Pro。

- 它识别到了玩具戒指,但可惜的是绕行的时候失误了,把戒指扫进了底盘。
- 塑料袋没识别到也是意料之中,确实难度太高了。
- 数据线也识别得可以,在距离线材10cm左右位置描边清洁,清洁覆盖率略微偏低,但缠绕风险更小。
- 餐巾纸也识别得很好,完美绕行。
- 再次经过体重称的时候,轻微碰了一下,问题不大。
总得来看,追觅的避障也非常优秀,并且策略更保守一些,虽然效率低一点,但胜在更稳妥。
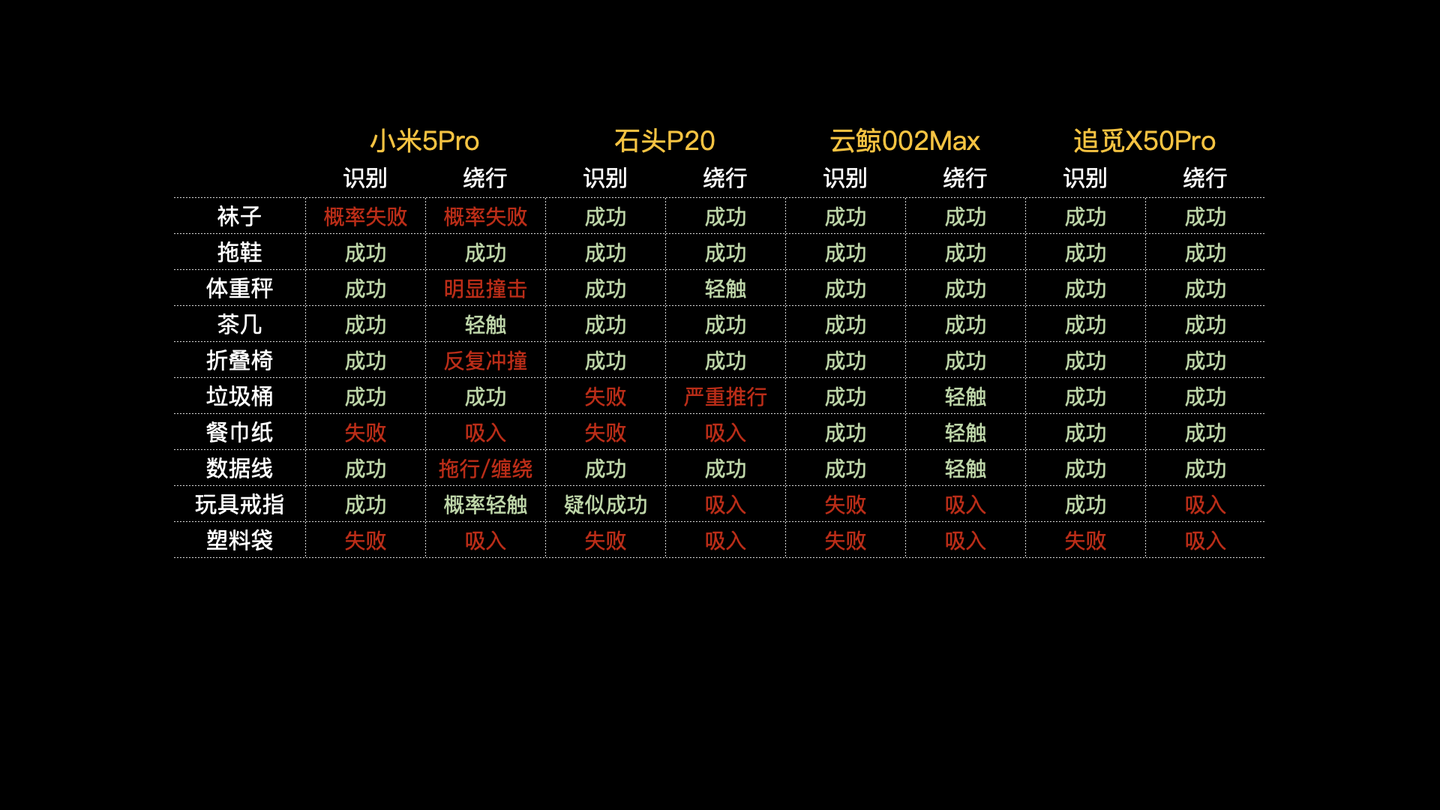
5. 避障小结
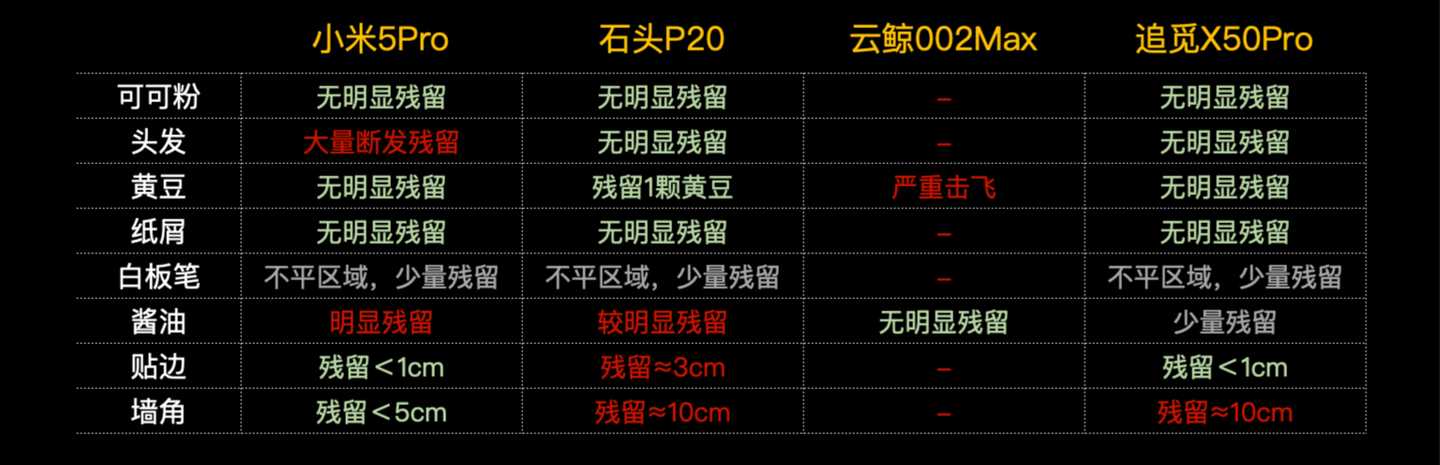
这四台机器的避障性能汇总我也帮大家整理了表格,有需要的小伙伴可以慢慢看。
二. 越障能力测试
我们普通人家里,多多少少都有些坡坡坎坎,比如推拉门的滑轨,浴室阳台的门槛等等。 机器人的越障能力关系到,它能不能进入这些区域,以及进去了之后,还能不能出来,需不需要人类手动去解救。 因此,也是影响我们使用体验的关键点之一。

4台机器都能成功越过2cm高的木板,其中追觅的表现最轻松。
但是3cm木板,却只有云鲸勉强跨过去了。
三. 清洁力与边角覆盖率测试
为了测试机器人的清洁力和边角覆盖率:

- 我先用红色白板笔画出一个纵横交错的污染区,模拟日常生活中,需要湿拖才能处理的污渍。
- 再取50根大约40cm长的头发铺开,测试机器人处理长发和防缠绕的能力。
- 接着再在往地面撒1g可可粉,考察机器人对粉尘类脏污的处理效果。
- 另外取20颗黄豆,模拟容易被击飞的颗粒物。
- 再洒上几片剪碎的餐巾纸。 最后,再在旁边滴3ml超浓的红糖老抽,涂抹均匀,模拟少量湿垃圾泼溅的场景。

于是,我们的超级污渍混合大阵就搭建完成了。
1. 小米5Pro
第一位挑战者,还是我们的小米同学。

- 可以看到第一遍通过时,酱油的残留还是非常明显的,但是贴边控制得相当不错。
- 到了第一次转角时,猛撞了一下我设置的假墙,把墙都撞歪了… 估计也是避障不好导致的问题。

- 清扫完成后,中心区的可可粉,纸屑,黄豆都处理得很好,肉眼无可见残留。
- 红笔印还有些残留,可能跟木地板的平整度有关。
- 酱油残留就要严重一些了,湿垃圾对于小米的圆盘拖布来说确实有些超纲。

- 如果我们再凑近一点细看的话,会发现地面上有非常多切割后残留的断发,小米的切割式防缠绕似乎有些问题。
- 边角处理上,墙面边缘几乎能完美贴边,墙角也只有大约5cm的残留,这也是圆盘拖布的主要优势。
2. 石头P20
第二位出场的是,石头P20。

- 很明显,它在尝试贴边时出了点问题,不断地撞墙后,又退回,可能是在识别我家的超薄踢脚线时出了bug。
- 同时也能明显地看到,即使是滚筒拖布,快速扫过一遍也是没法完全处理干净酱油的。

- 最终在完成清扫后,可可粉,纸屑,黄豆,头发都处理得很好,除边缘处有一颗黄豆外,都没有残留。
- 中心区地面不平的地方,有残留了一些红笔印。
- 酱油也没有完全拖干净,但比小米还是要强一档。
- 贴边性能上石头的表现就有点糟糕了,残留了大约2cm的红笔印,这可能跟前面提到的踢脚线bug有关系。
- 而墙角处的处理就明显不如圆盘式拖布了,残留了大约10cm的红笔印。
3. 云鲸002MAX
接下来出场的是云鲸002MAX。
即使我在APP里把所有AI相关和避障选项都调到了最低,它也会把前方的酱油识别成需要授权才能清理的湿垃圾,在绕过酱油后,尝试清洁其他垃圾时,也只是简单地进去转了一圈就出来了,残留物非常多,测试结果基本不可用。

授权它重新清洁了一次酱油后,可以看到,云鲸对识别到的湿垃圾采用了更为精细清洁策略,清洁效果也自然更好,清洁完成后,肉眼完全看不出酱油残留。

但除了湿垃圾的特殊清洁外,其他污渍的测试我试了很多方法,都不能让它完成正常清洁,它几乎一定会把严重的脏污,识别成不能进入的区域,然后快速逃离,导致测试失败….

但可以确定的是,它的颗粒物击飞很严重,边刷跟在打高尔夫一样,黄豆被打得到处跑。
4. 追觅X50Pro
最后出场的是追觅X50Pro。

- 贴边非常不错,几乎完美贴过去了。
- 墙角还是有明显的硬伤,残留红笔印挺多。
- 转过来之后的清洁力和贴边也相当不错。

- 清扫结束后,可可粉,纸屑,黄豆,头发都处理干净了。
- 地面不平区域的红笔印有轻微残留。
- 酱油同样也有残留,但比石头更少一点点。
5. 清洁力小结
如果云鲸的AI不出bug的话,从几次失败的测试来推测,清洁力和边缘控制应该和追觅差不多,但世界上没有那么多如果,所以,这项测试它没有成绩。剩下的三台,追觅拿第一,没啥悬念。
小米和石头则各有优劣,小米强在边角处理,但会残留大量的断发和酱油痕迹,圆盘拖布也不适合处理浴室一类的潮湿环境。 石头则需要好好加强一下贴边算法。
四. 维护难度测试
扫地机器人好不好用,还有最后一个关键点 - 维护难度。 我们在机器人做完清洁力测试后,再让它继续工作大概20分钟,等防缠绕结构充分发挥作用,然后进入基站运行一次完整的自清洁流程,取出机器人观察底盘。
1. 小米
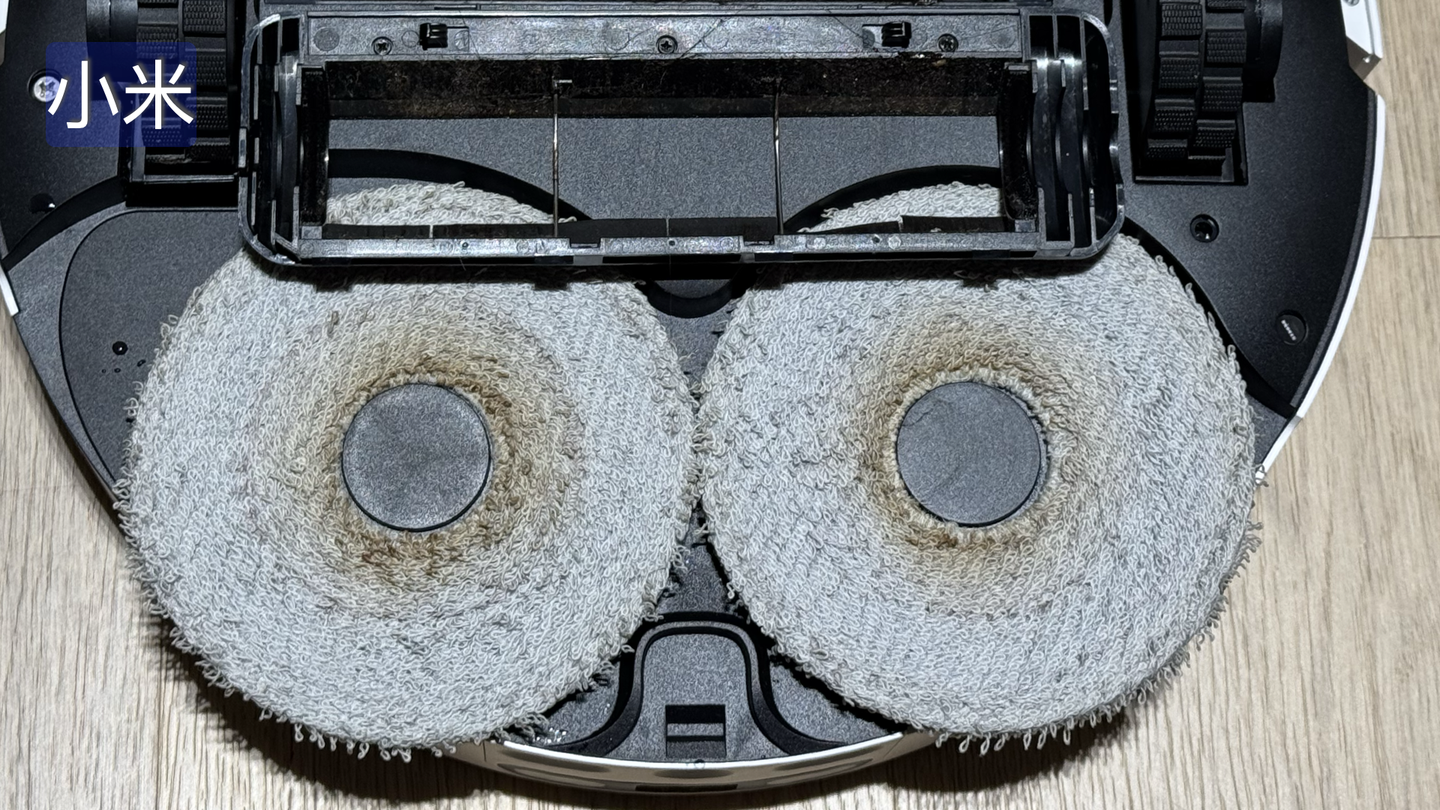
小米拖布的中心,有明显的酱油残留没有洗干净。
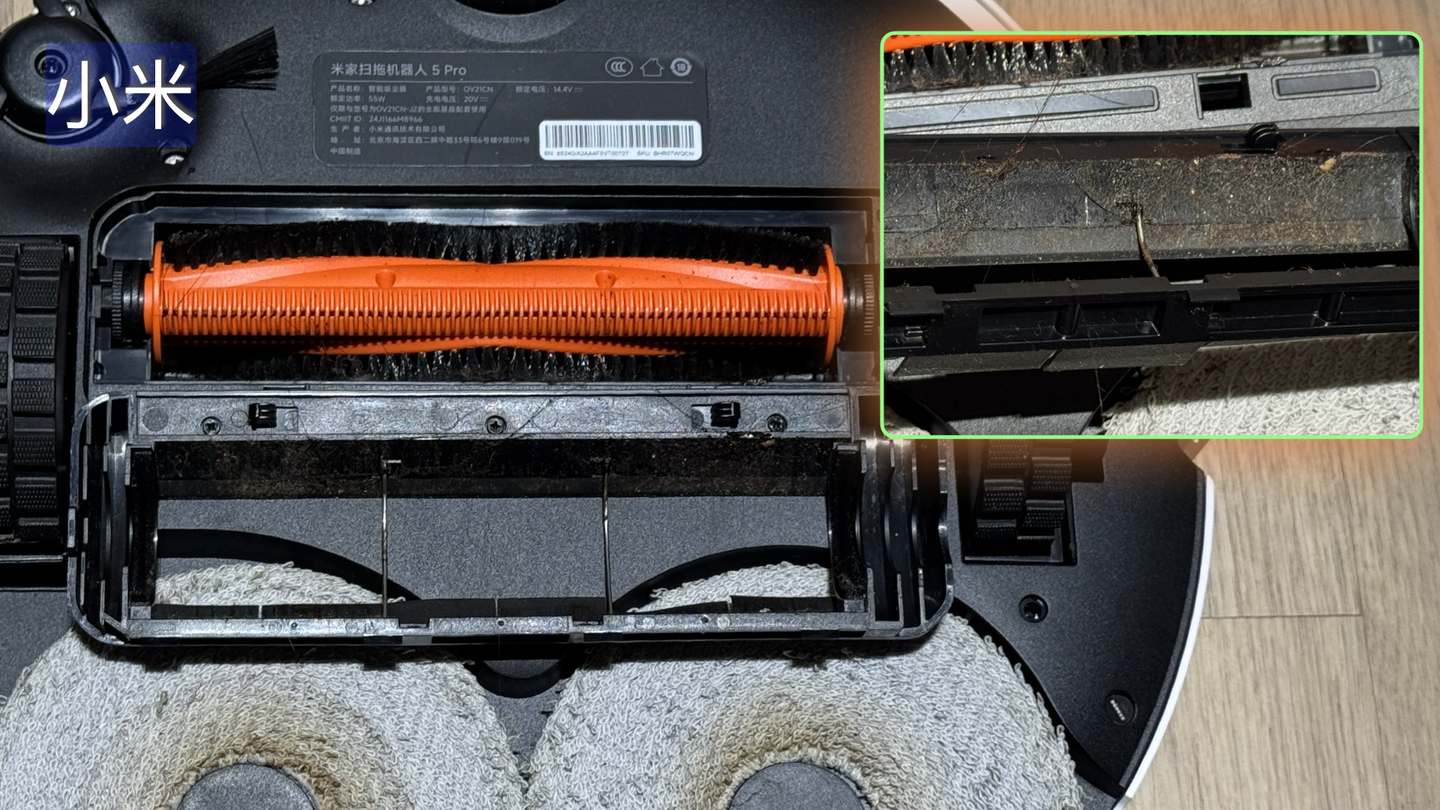
主刷外壳上有大量可可粉打湿后形成的“巧克力酱”,外壳和主刷内部的头发残留也非常多,无法计算数量。

另外,在轮子上也发现了一根头发缠绕。
2. 石头
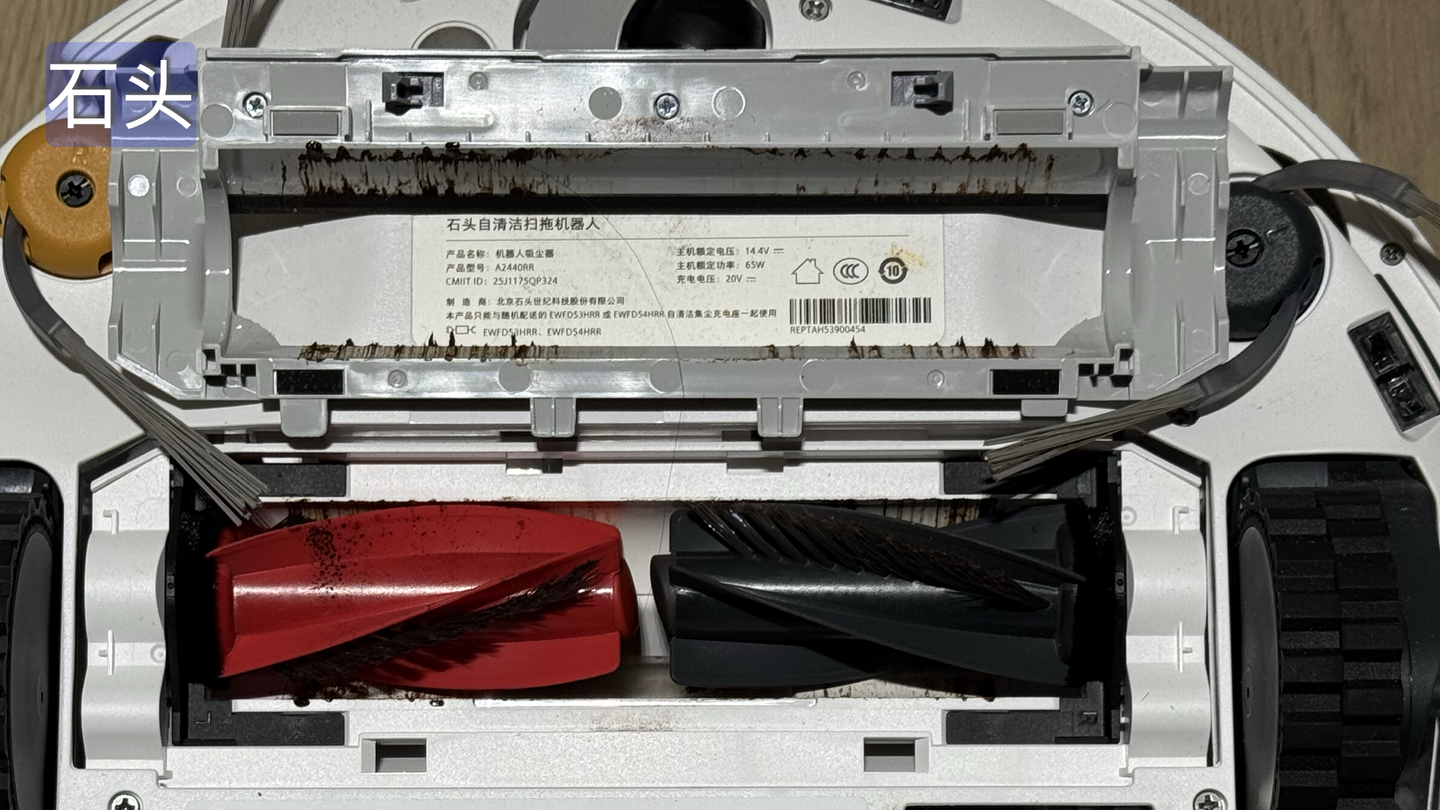
石头的主刷防缠绕做得非常不错,只残留了一根头发,可能是被“巧克力酱”黏住了。

滚筒的清洁效果很好,肉眼观察无明显污渍。
3. 云鲸
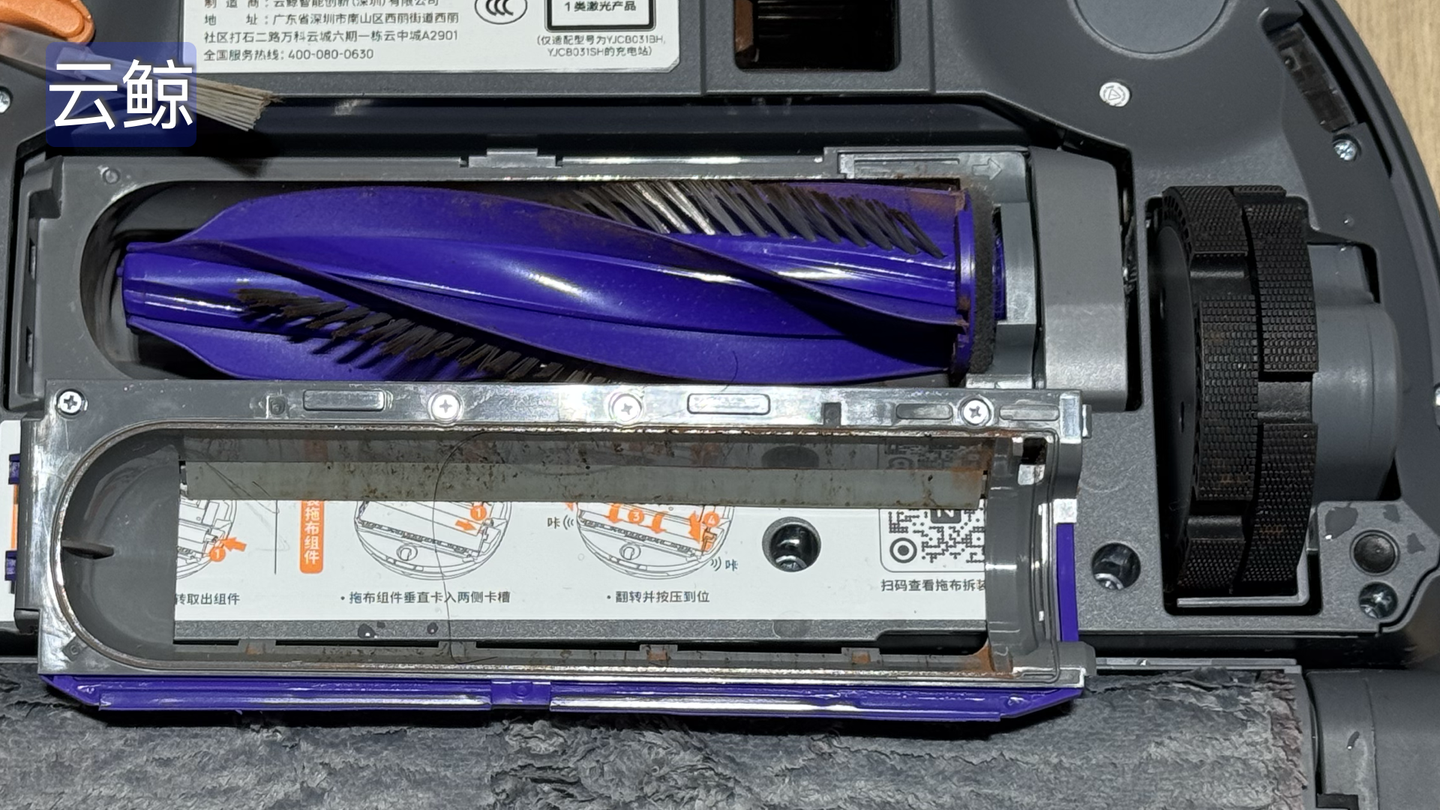
云鲸的主刷防缠绕也很不错,只有两根残留。 巧克力酱比较少,可能是因为它的酱油是单独处理的缘故。

履带自清洁表现也还好,除了两端能看到少许红色印记,其他区域都很干净。
4. 追觅
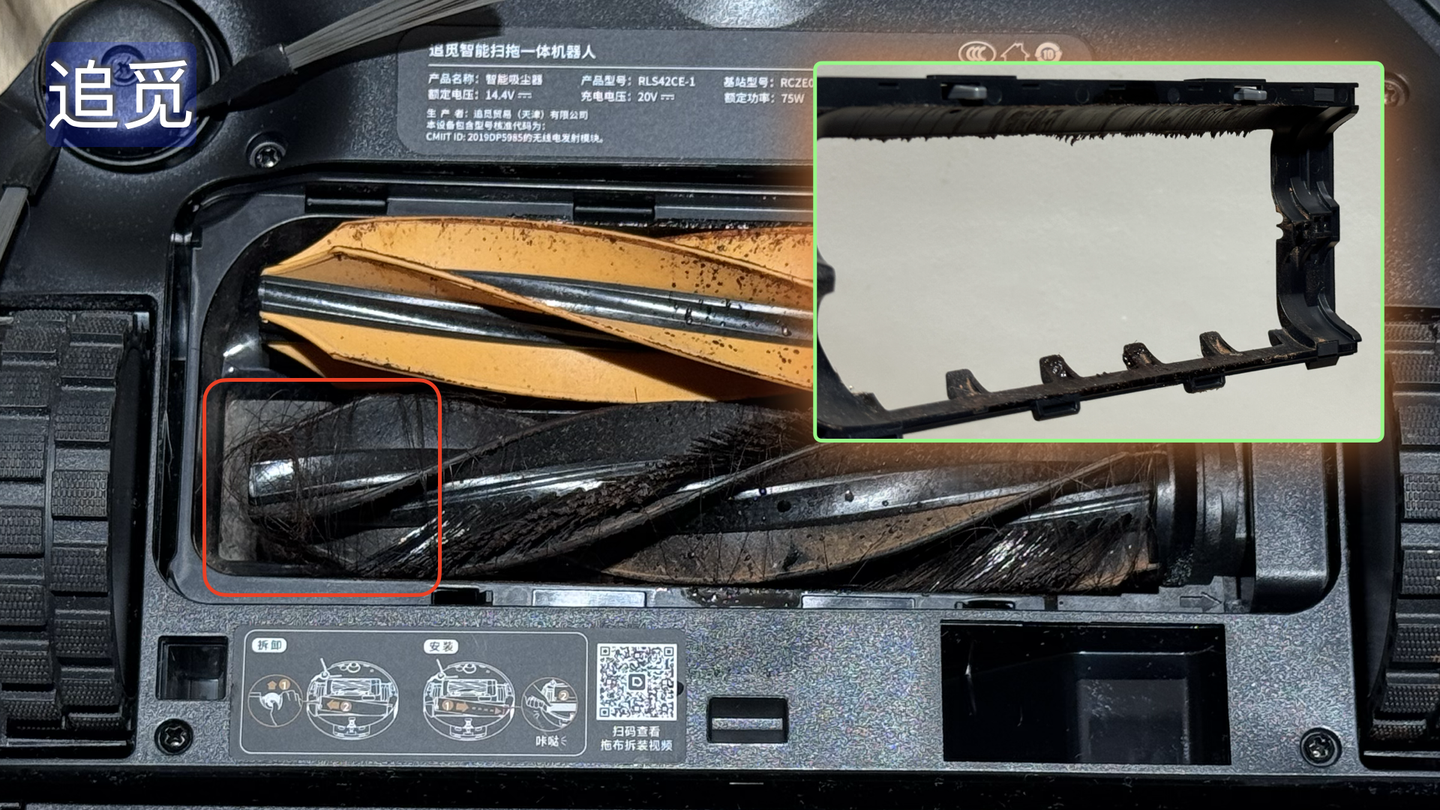
追觅的主刷防缠绕可能起效得比较慢,可以看到大量头发堆积在了锥形刷头的末端,靠近吸气口的位置。 但它与石头、云鲸使用的都是相近的技术,因此可以推测,如果继续加长运行时间的话,绝大部分毛发也会被吸走。 主刷外壳上,追觅也出现了比较严重的巧克力酱现象。
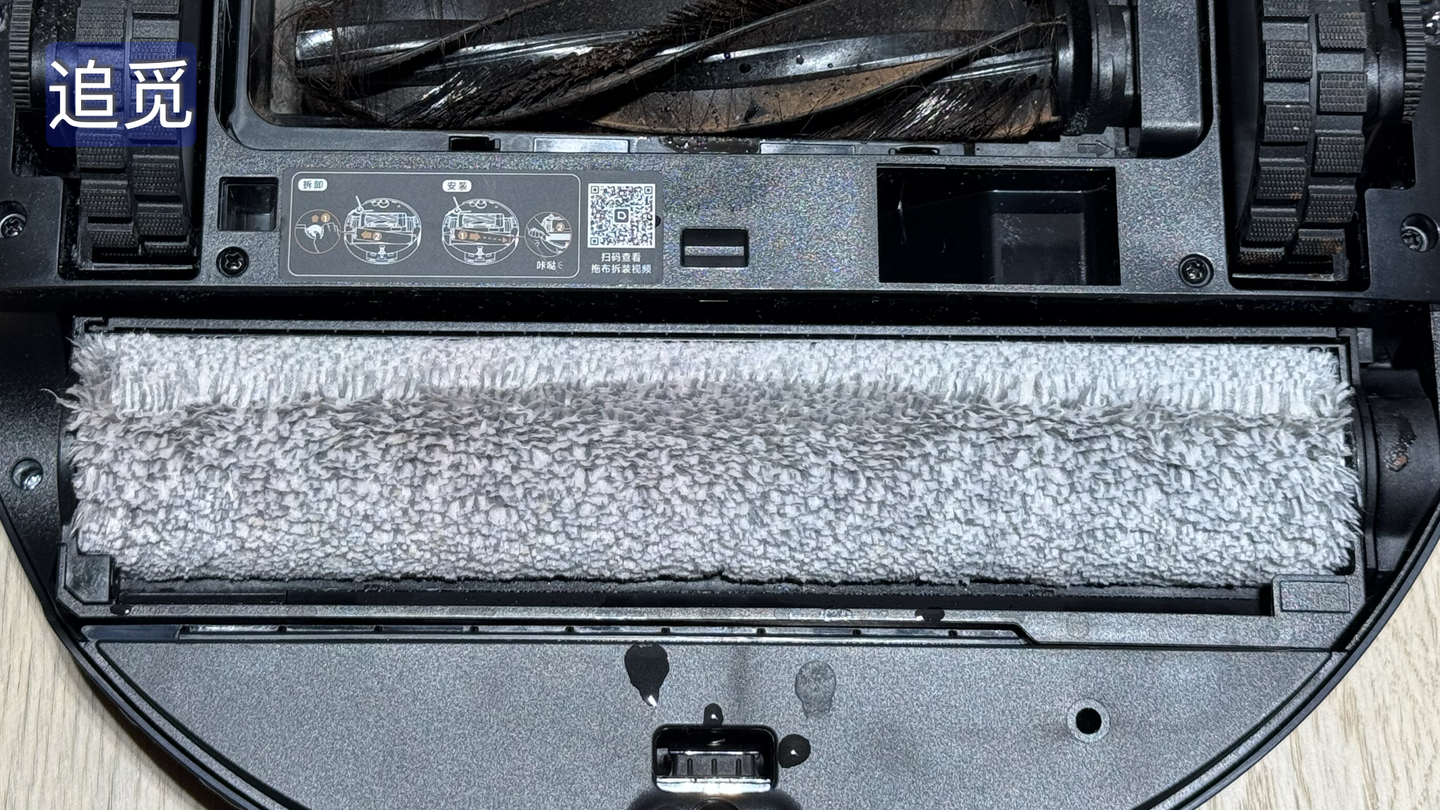
滚筒的自清洁表现很优秀,肉眼观察没有明显污渍残留。
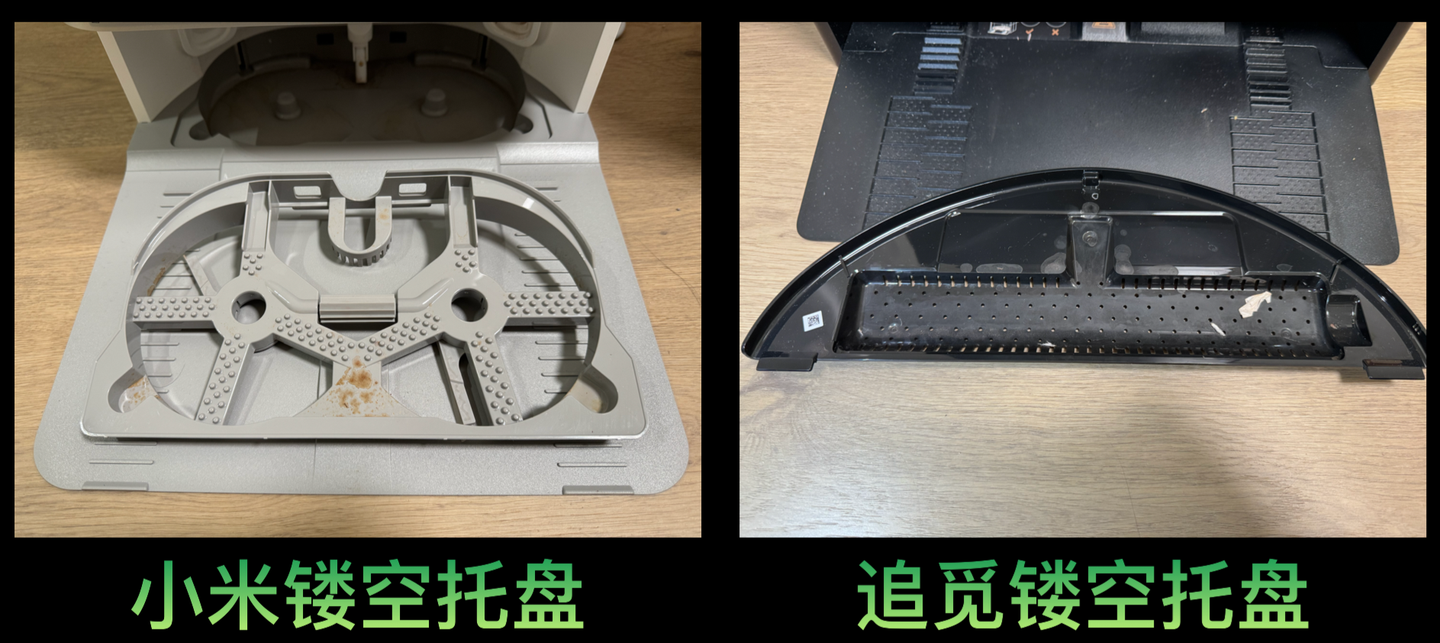
5. 基站底座
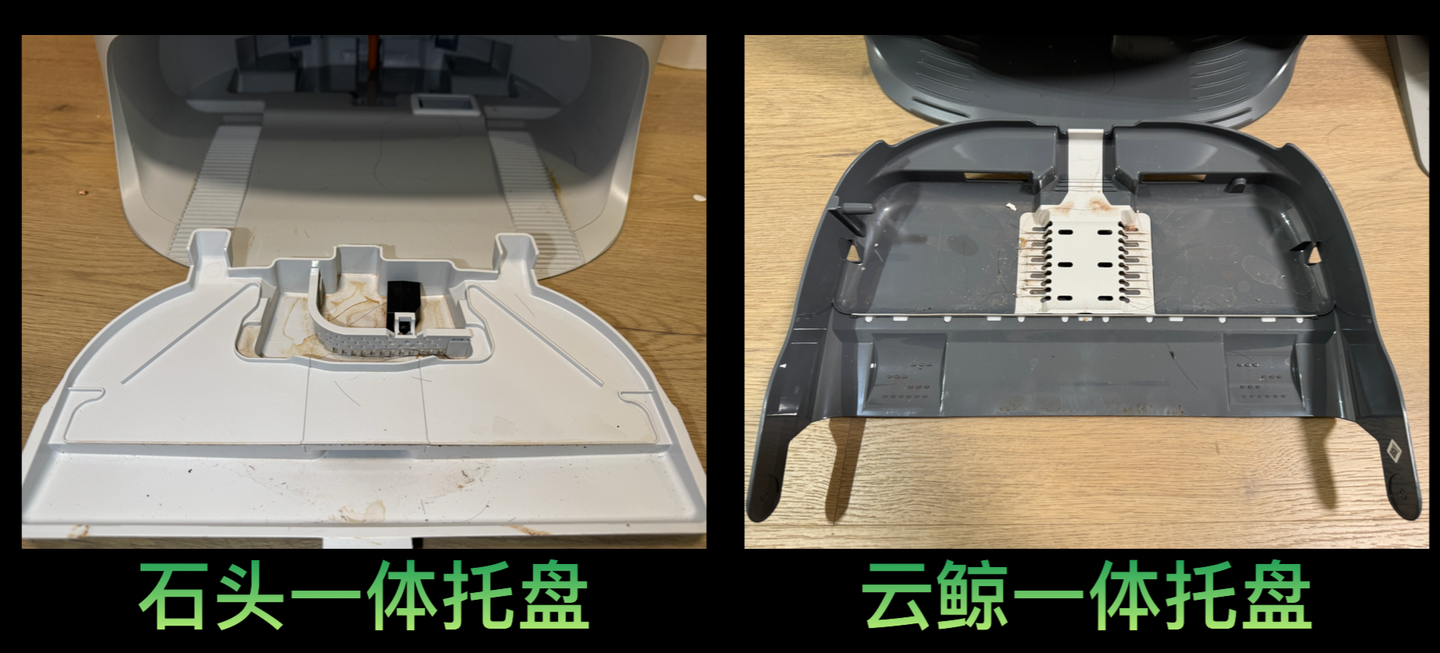
基站底座这边,石头和云鲸都用了可以整体取出的托盘结构。
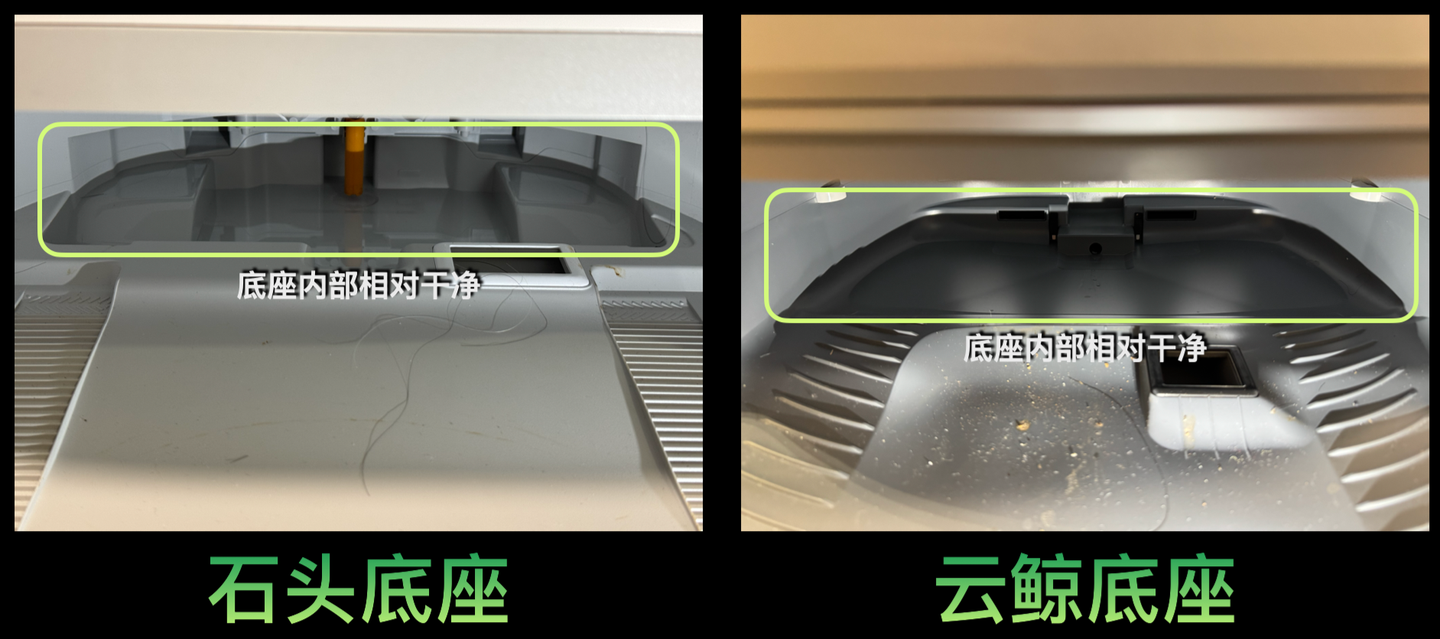
优点是方便取出来清洗,缺点是,如果排水结构完全堵塞,取出托盘的时候,脏水容易溢出来。
小米和追觅则是经典的分离式结构。
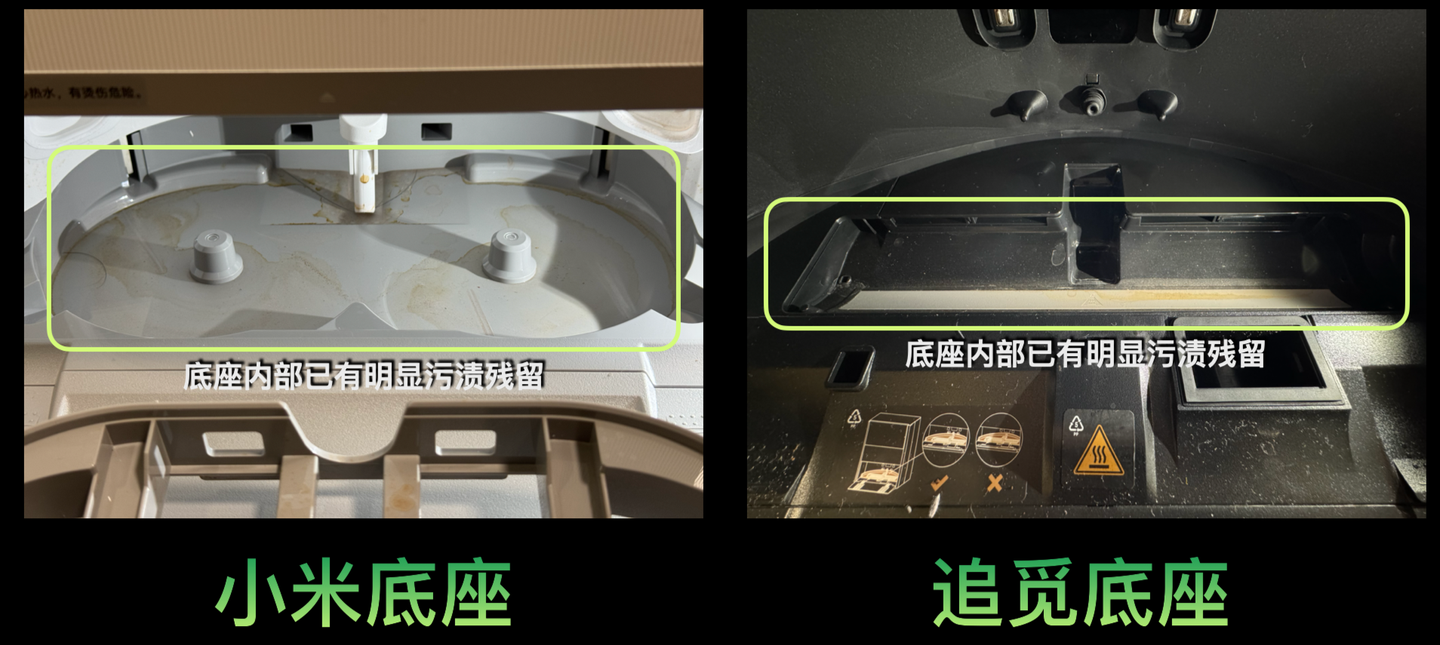
得爬在地上,才能清洗底盘,体验要稍微差一些。
五. 滚筒/履带水路结构分析
这次实测的4台机器,有3台都是滚筒和履带式的,其特点是,一边拖地,一边又用刮条把污水刮走,从而使拖布一直保持在相对清洁的状态。 但刮条刮出来的污水要先存进机身内部的污水箱,在回到基站时,又要排空污水箱。 而我们真实的地面环境其实是非常复杂的,各种固体垃圾也有可能被带进滚筒里,所以,滚筒的水路结构设计也是非常重要的。

首先,要提出批评的是云鲸,它采用了不可拆卸的污水箱方案,虽然用搅拌器降低了堵塞概率,但你能保证每次吸进去的固体都能被搅碎吗?如果有头发缠绕了搅拌器呢? 我对这套方案的可靠性持怀疑态度。

追觅和石头都采用了可拆卸的污水箱设计,但石头的设计要略优于追觅。
我们先看刮条这里,石头和云鲸都是大量并排的小孔排水口。
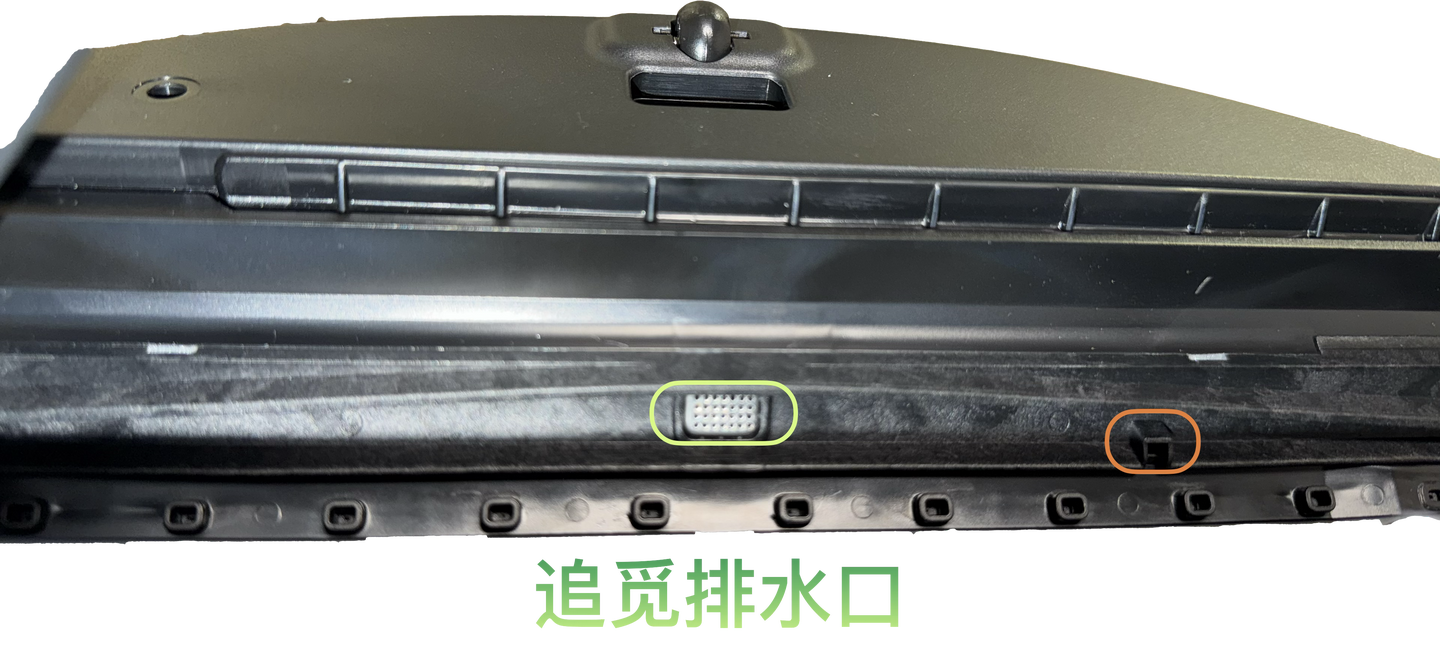
而追觅只有一个孔,还加了一个滤网,这就导致排水口非常容易堵塞。 追觅可能也想到了这个问题,旁边这个应该是一个溢流口,在滤网堵塞后,保持排水,让机器人依然能工作,但就没有过滤作用了… 既然如此,为什么不一开始就设计不需要过滤的排水口呢?
石头的导水槽和污水盒是一体式设计,更方便清洁,污水从导水槽垂直向上抽进污水盒内部,然后经过水盒上层的过滤盒,拦截容易造成管路堵塞大颗粒。
追觅的污水则是直接通过一条带直角弯的细长管道进入污水盒,这个直角弯,感觉后期容易变成一个堵点,而且不太好清洁的样子。 进到污水盒里面,也没有干湿分离结构,固体颗粒后期可能导致诸如漏水,堵塞一类的故障,细节上明显不如石头那么走心。
六. 总结
最后来总一个结。
1. 云鲸

只看新机的使用体验的话,云鲸的综合表现是4台机器里最好的。 避障优秀,清扫效率也高,主动识别湿垃圾避免主刷堆积巧克力酱,等等,优点是非常多的,但是它的整体设计明显是有些过于激进的。 避障追求极限贴边,AI识别不能关闭,不可拆卸的污水箱,后期可能有维护难题。 如果你能接受,那么它是一台非常优秀的机器人,但问题是,你能接受吗?
2. 追觅
追觅在避障和清洁力两个关键指标上的表现非常优秀,算得上全场最佳,但是糟糕的污水盒设计是个减分项。高达4k的售价,也确实有点让人难以下手,但是,话有说回来了,追觅跳水王的称号也是如雷贯耳,如果也能在3k左右入手的话,就很有性价比了。
3. 石头

石头P20则明显是石头试水滚筒式拖布的机器,硬件设计很优秀,但是基础版给到的避障规格太低了,同样3k左右的售价,就显得不如云鲸划算。
4. 小米

小米的话,避障实在是太弱,圆盘拖布又不适合清洁潮湿环境,适用范围比另外几台差了一截。 清洁时还会留下大量断发,几乎是全方位的,不尽如人意。 如果确实想买圆盘机型的话,不如看看云鲸001的官翻机,1500块左右,过渡用个几年,等技术更成熟之后再换也不那么心疼,对吧。
以上,就是本期测评的全部内容了,评测踩坑微醺上,一键三连靠大家,我们下期视频再见~