鼠标微动开关 键盘开关轴指南 beta1.1
鼠标微动开关 键盘开关轴指南 beta1.2
注意:由于缺少强制国际标准,行业内的命名比较混乱,我正在研究较好的命名标准,此文章可能持续更新。
原理图由AI生成,并不完全准确。也许以后会更新真实测量结果。
微动开关与机械轴体核心参数定义
## 一、力学参数 (Force Parameters)
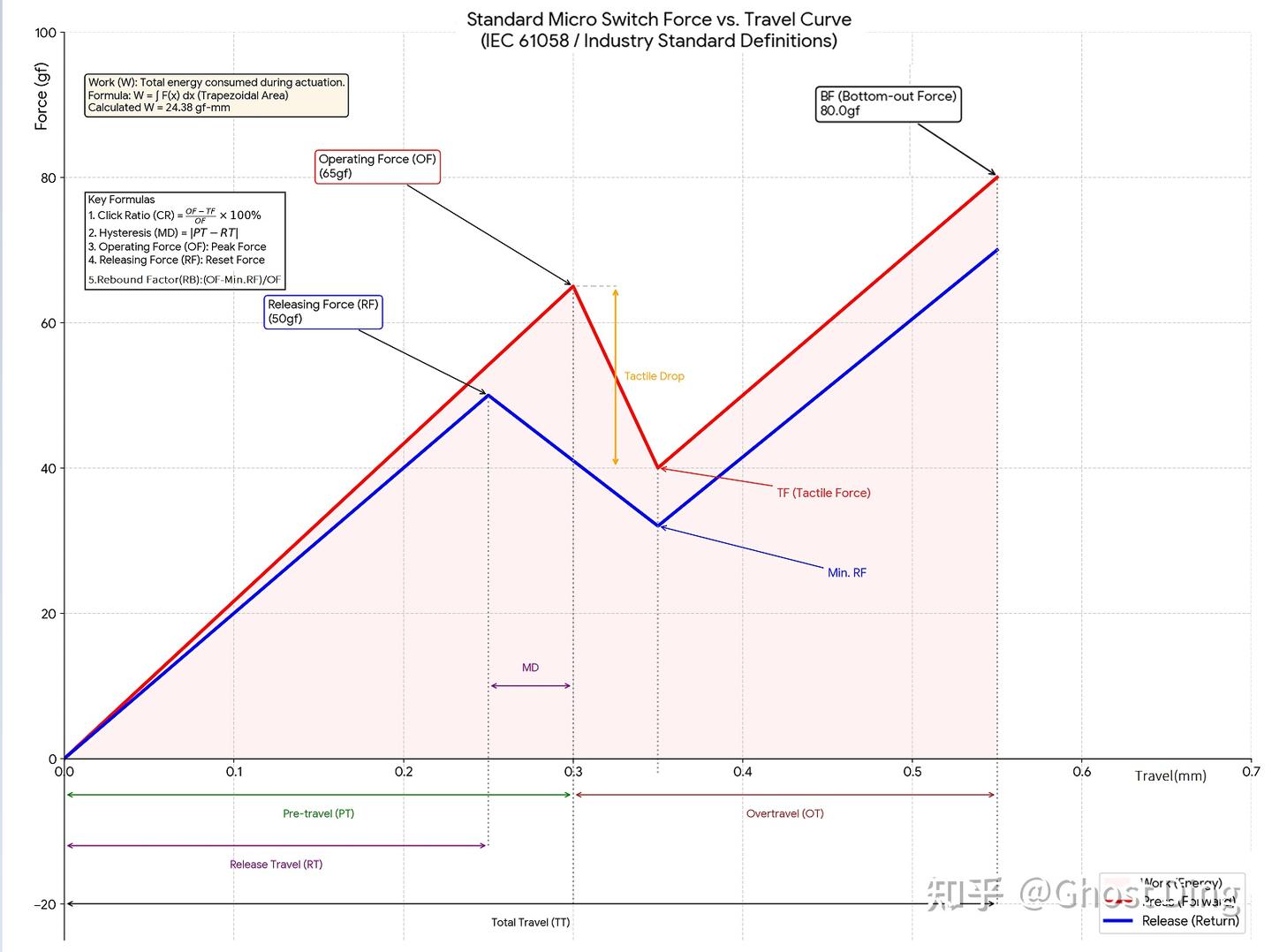
### OF (Operating Force)
- **中文全称**: 动作力
- **英文全称**: Operating Force
- **定义**: 按下按键的过程中,从位置0移动到切换动作位置所需的最大力.
-单位:gf
### TF (Tactile Force)
- **中文全称**: 段落力 / 谷底力/Valley Force
- **英文全称**: Tactile Force
- **定义**: 经过动作力(OF)峰值后,力值下降到的最小力点,也常被称为“谷底力”。此参数仅存在于有段落感(非线性)的开关中。
-单位:gf
### RF (Reset Force / Releasing Force)
- **中文全称**: 复位力 / 释放力
- **英文全称**: Reset Force / Releasing Force
- **定义**: 在按键回弹过程中,开关内部触点断开(即电路断开/切换)瞬间的力值。
-单位:gf
### Min. RF (Minimum Releasing Force)
- **中文全称**: 最小回弹力
- **英文全称**: Minimum Releasing Force
- **定义**: 在按键回弹(释放)的过程中,最小回弹力。
-单位:gf
### BF (Bottom-out Force)
- **中文全称**: 触底力
- **英文全称**: Bottom-out Force
- **定义**: 将按键按压至最大物理行程(按到底)时所需的力。它决定了按键触底时的“撞击感”。
-单位:gf
### TD (Tactile Drop)
- **中文全称**: 段落落差
- **英文全称**: Tactile Drop
- **定义**: (OF)与(TF)的绝对差值。这个值影响了手感反馈/震动感的强烈程度。
- **计算公式**: TD= OF - TF
-单位:gf
### CR (Click Ratio)
- **中文全称**: 点击率 / 段落比
- **英文全称**: Click Ratio
- **定义**: 描述触觉反馈强度(段落感)的相对指标。比率越高,通常意味着手感越“清脆”。
- **计算公式**: CR (%) = ((OF - TF) / OF) * 100%
-单位:%
### RB (Rebound Factor)
- **中文全称**: 回弹系数
- **英文全称**: Rebound Factor
- **定义**: 描述按键回弹比值。数值越小,代表回弹越强、越快。
- **计算公式**: RB = (OF - Min. RF) / OF
## 二、行程参数 (Travel Parameters)
### PT (Pre-travel)
- **中文全称**: 预行程 / 触发导通行程
- **英文全称**: Pre-travel
- **定义**: 从按键的0位置到其电气触发点(即开关动作)所经过的距离。
-单位:mm
### RT (Reset Travel)
- **中文全称**: 复位行程
- **英文全称**: Reset Travel / Release Travel
- **定义**: 在按键回弹过程中,从电路断开(切换) 到位置0所经过的距离。
-单位:mm
### TT (Total Travel)
- **中文全称**: 总行程
- **英文全称**: Total Travel
- **定义**: 按键能够被按下的最大物理距离(从位置0到触底)。
-单位:mm
### OT (Overtravel)
- **中文全称**: 过行程/缓冲行程
- **英文全称**: Overtravel/缓冲行程
- **定义**:按下按键,触发后的缓冲行程。 从开关触发点(PT)到触底的距离。
- **计算公式**: OT = TT - PT
-单位:mm
### MD (Movement Differential)
- **中文全称**: 迟滞 / 行程差
- **英文全称**: Movement Differential / Hysteresis
- **定义**: 触发点(PT)与复位点(RT)之间的物理距离差。此参数可以防止开关因微小振动或在触发点附近犹豫而产生“连击”或“颤动”。
- **计算公式**: MD = PT - RT
-单位:mm
### DT (Differential Travel)
- **中文全称**: 行程差
- **英文全称**: Differential Trave/Hysteresis
- **定义**: 触发点(PT)与复位点(RT)之间的物理距离差。此参数可以防止开关因微小振动或在触发点附近犹豫而产生“连击”或“颤动”。
- **计算公式**:DT = PT - RT
-单位:mm
## 三、能量
### W (Total Work)
- **中文全称**: 总功
- **英文全称**: Total Work
- **定义**: 在整个按压过程(从0到总行程TT)中,力与位移曲线下的总面积。它代表了用户完整按压一次按键所消耗的总能量,与长时间使用的疲劳度相关。
- **计算公式**:W = ∫ F(x) dx (Trapezoidal Area).
-单位:mJ
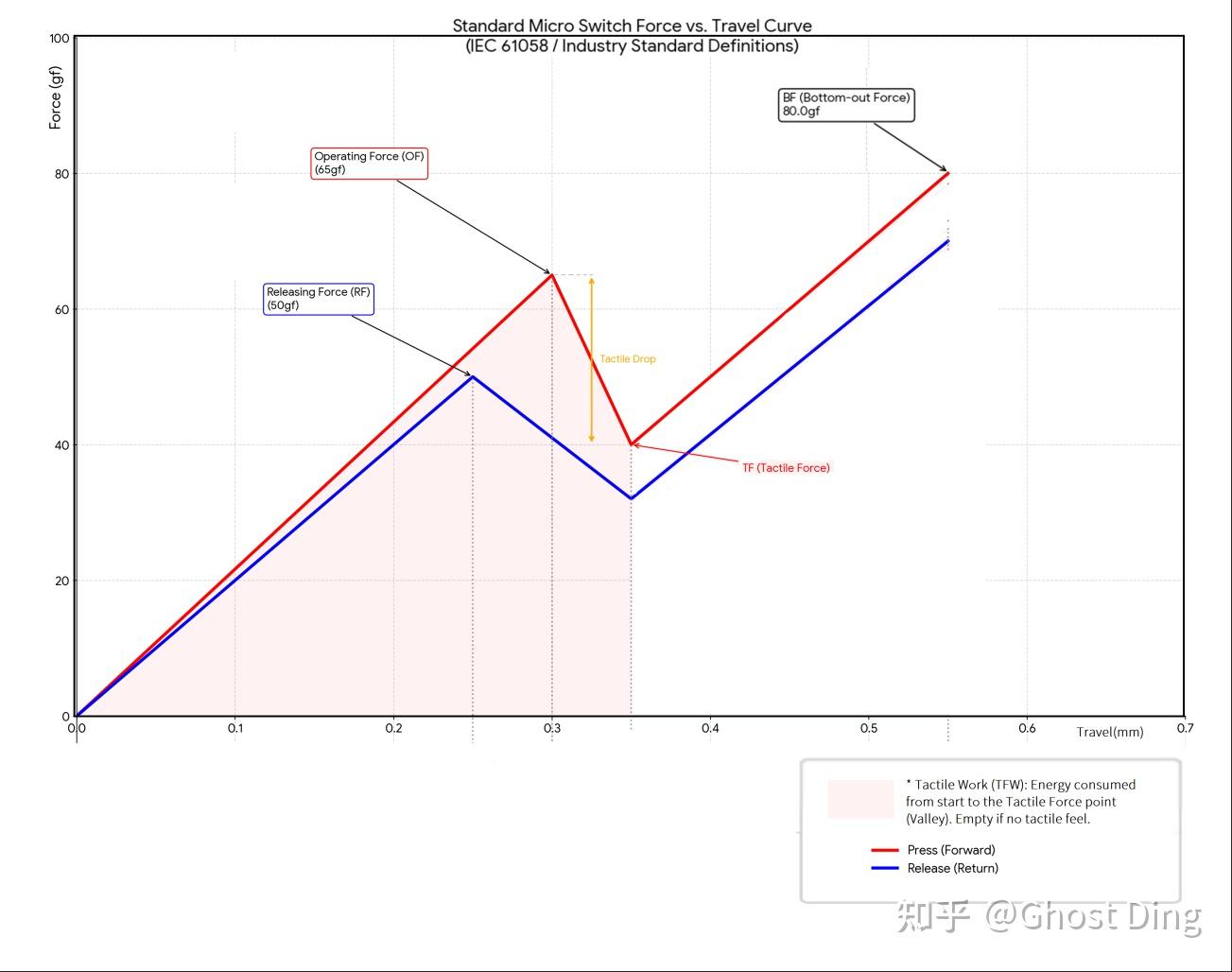
### TFW (Tactile Work)
- **中文全称**: 段落功
- **英文全称**: Tactile Work
- **定义**: 从开始按压到TF位置所消耗的能量。它描述了用户连续高频率点击(不按到底)需要付出的能量代价。
- **计算公式**: W = ∫ F(x) dx (积分范围从 0 到 TF点对应的行程)
-单位:mJ
##4.线性度 (Energy & Linearity)
### Linearity (R²)
- **中文全称**: 线性度
- **英文全称**: Linearity
- **定义**: 描述按压曲线(特别是线性轴)的平滑程度,数值范围为0.0到1.0。R²越接近1.0,表示按压过程越顺滑,无抖动。
- **计算公式**: N/A (通过统计学R-squared方法计算)
*************************************************************
选购指南:
### OF (Operating Force)
- **中文全称**: 动作力
- **英文全称**: Operating Force
典型值为60~65gf。较大的值可减少误触发,但是更累。较小的值适合办公,更省力,也适合高频率点击的游戏。
### TD (Tactile Drop)
- **中文全称**: 段落落差
- **英文全称**: Tactile Drop
TD 越大,确认感越强,震动感越强;TD 为 0 则为线性手感(无段落)。
PT (Pre-travel)
- **中文全称**: 预行程 / 触发导通行程
- **英文全称**: Pre-travel
典型值0.2~0.3mm,这个值越小,按键响应速度越快,适合游戏,但按键容错率小,可能容易误触发。如果喜欢软手感,建议较大的值。
### OT (Overtravel)
- **中文全称**: 过行程/缓冲行程
- **英文全称**: Overtravel/缓冲行程
较大的OT提供了更软的触底手感。较小的OT提供了更硬的触底手感,更快的回弹速度,适合游戏高频率点击。
### RB (Rebound Factor)
- **中文全称**: 回弹系数
- **英文全称**: Rebound Factor
游戏用途,高频率点击,建议RB值0.1~0.25,办公用途建议0.3~0.4.如果需要较大的反馈手感/震动手感,建议值0.4~0.5.
*************************************************************************
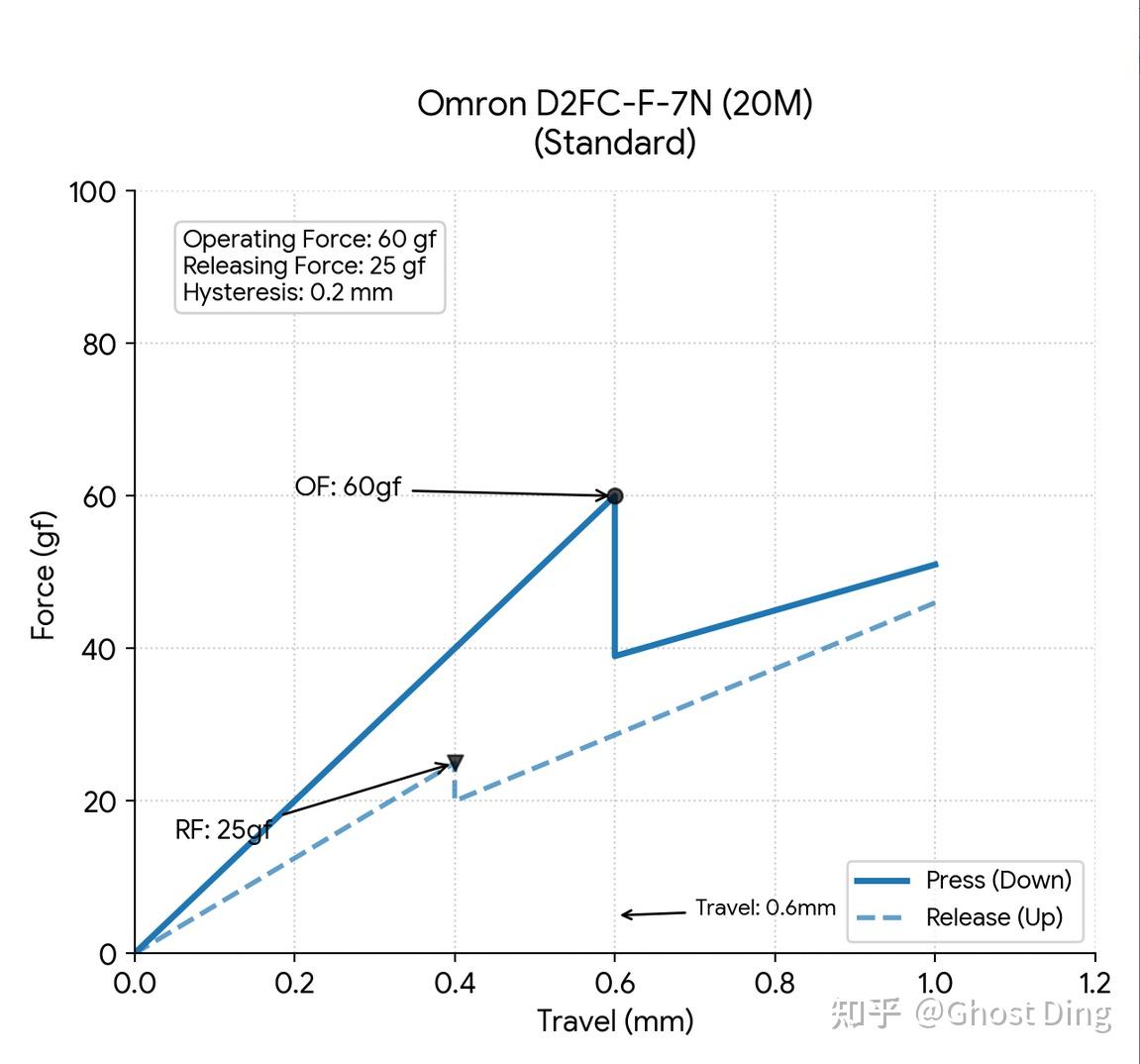
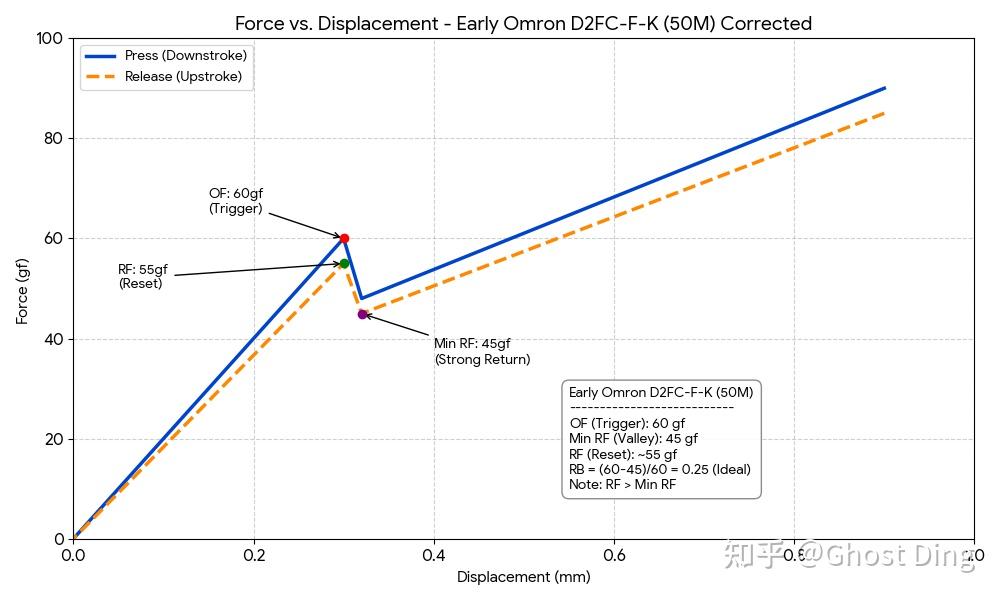
不同特性的鼠标微动开关对比:
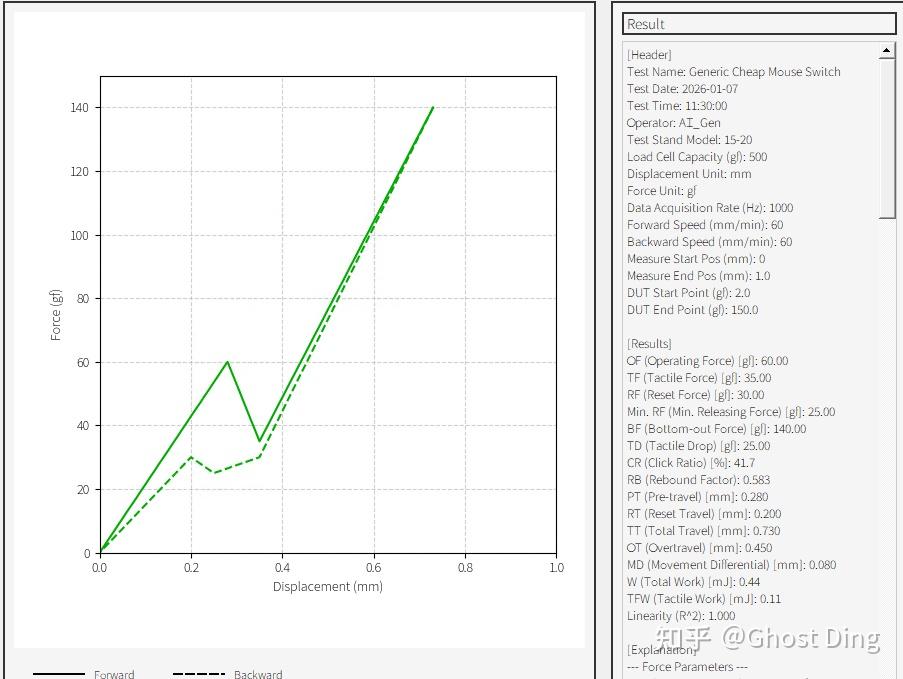
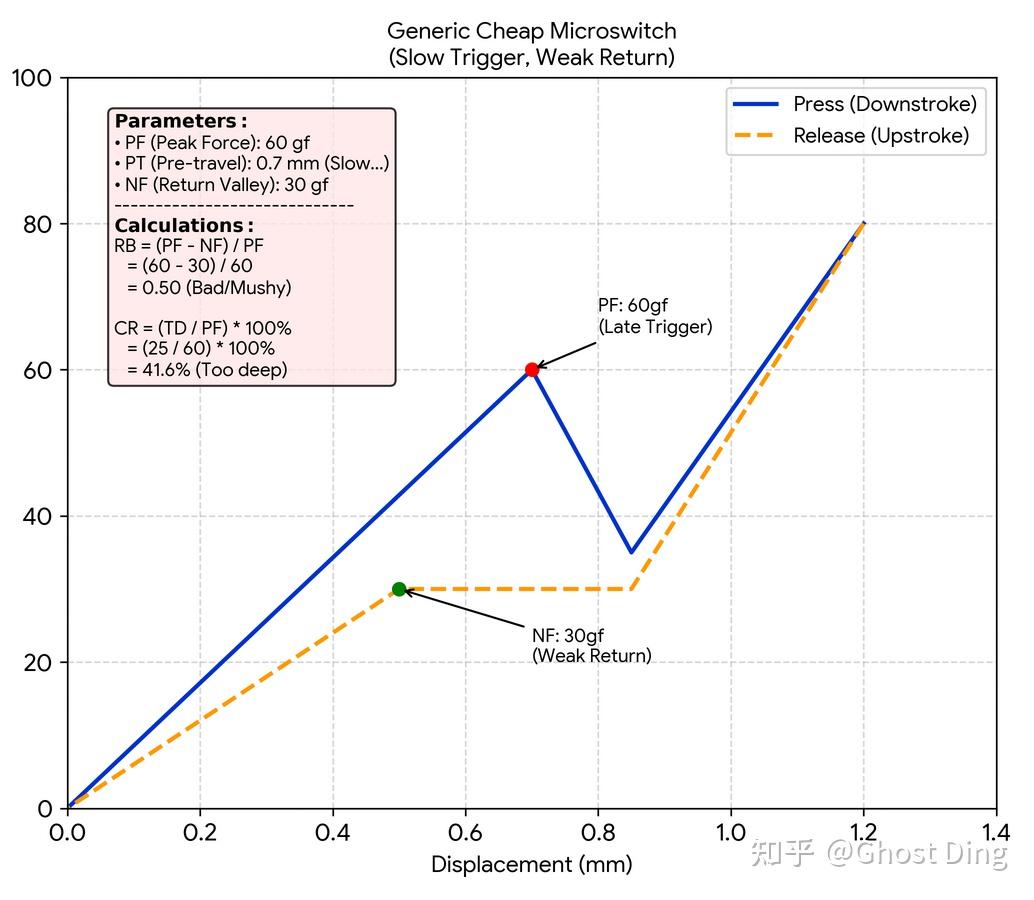
廉价微动开关:
OF (Operating Force) [gf]: 60.00
Min. RF (Min. Releasing Force) [gf]: 25.00
PT (Pre-travel) [mm]: 0.28
TT (Total Travel) [mm]: 0.73
RB:0.5
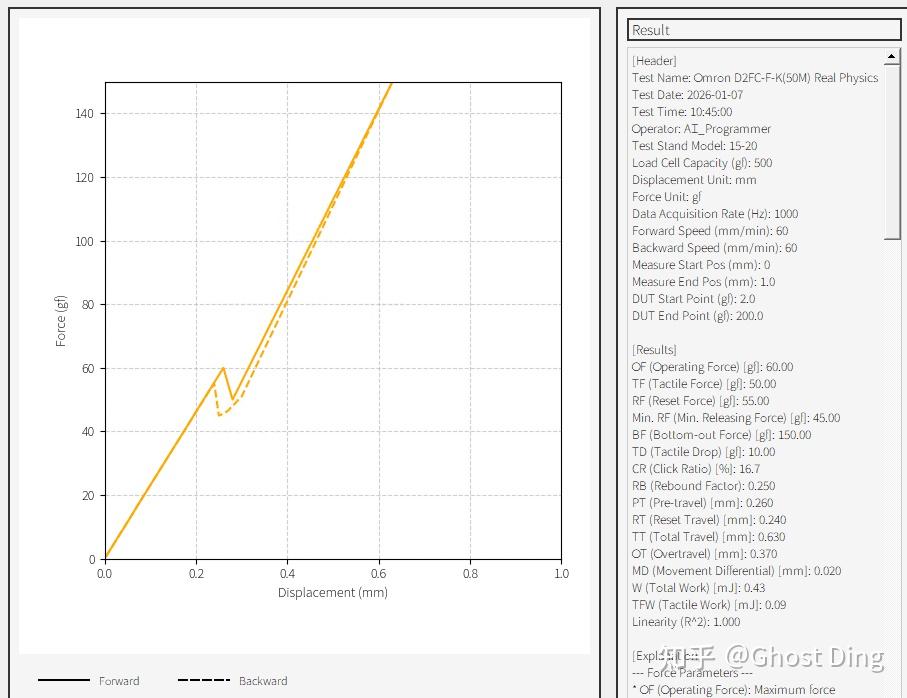
早期Omron D2FC-F-K(50M)定制版本微动开关:
OF (Operating Force) [gf]: 60.00
Min. RF (Min. Releasing Force) [gf]: 45.00
PT (Pre-travel) [mm]: 0.260
TT (Total Travel) [mm]: 0.630
RB:0.25
*****************************************
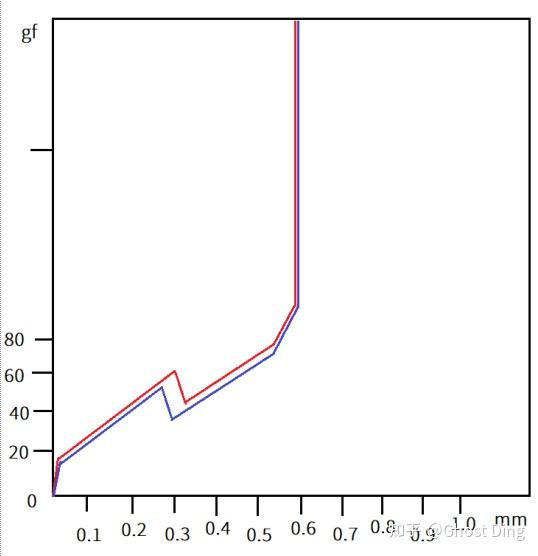
不同特性的鼠标微动开关对比(AI生成):
RB=0.2:
RB=0.4:
RB=0.2:
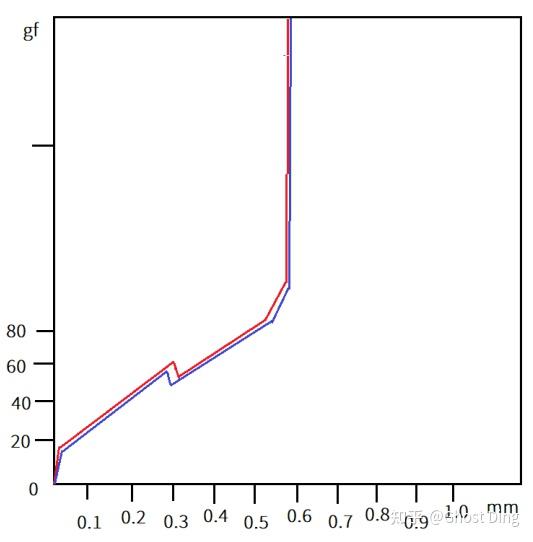
RB=0.4:
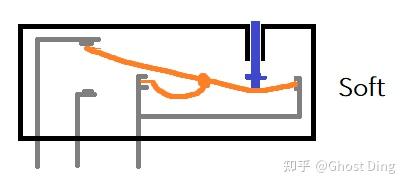
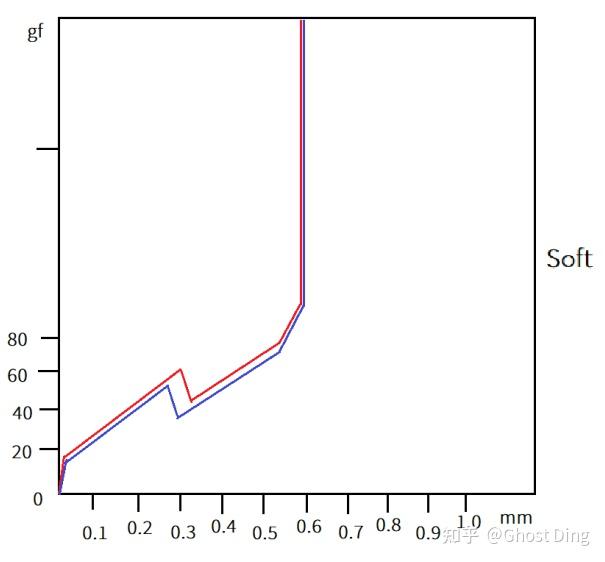
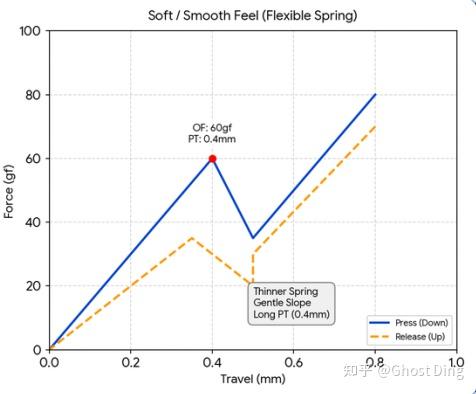
soft软手感:
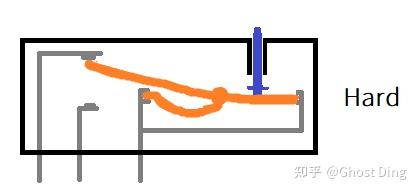
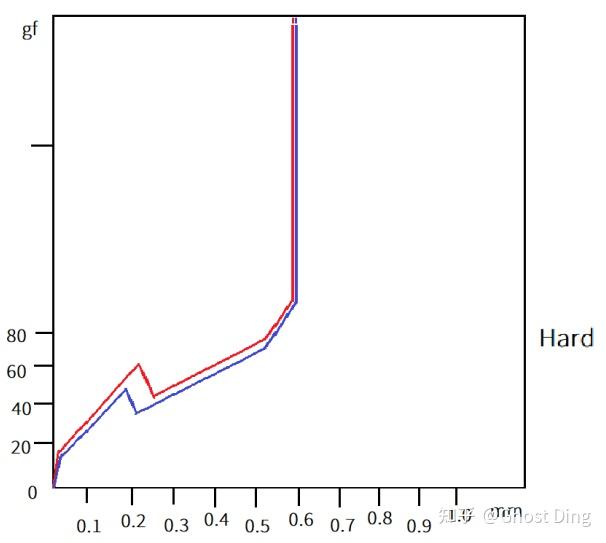
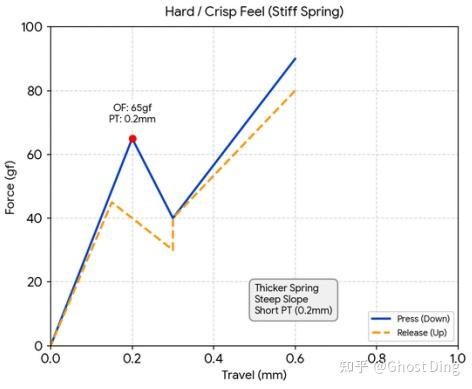
Hard硬手感:
soft软手感:
Hard硬手感:
**************************************************************
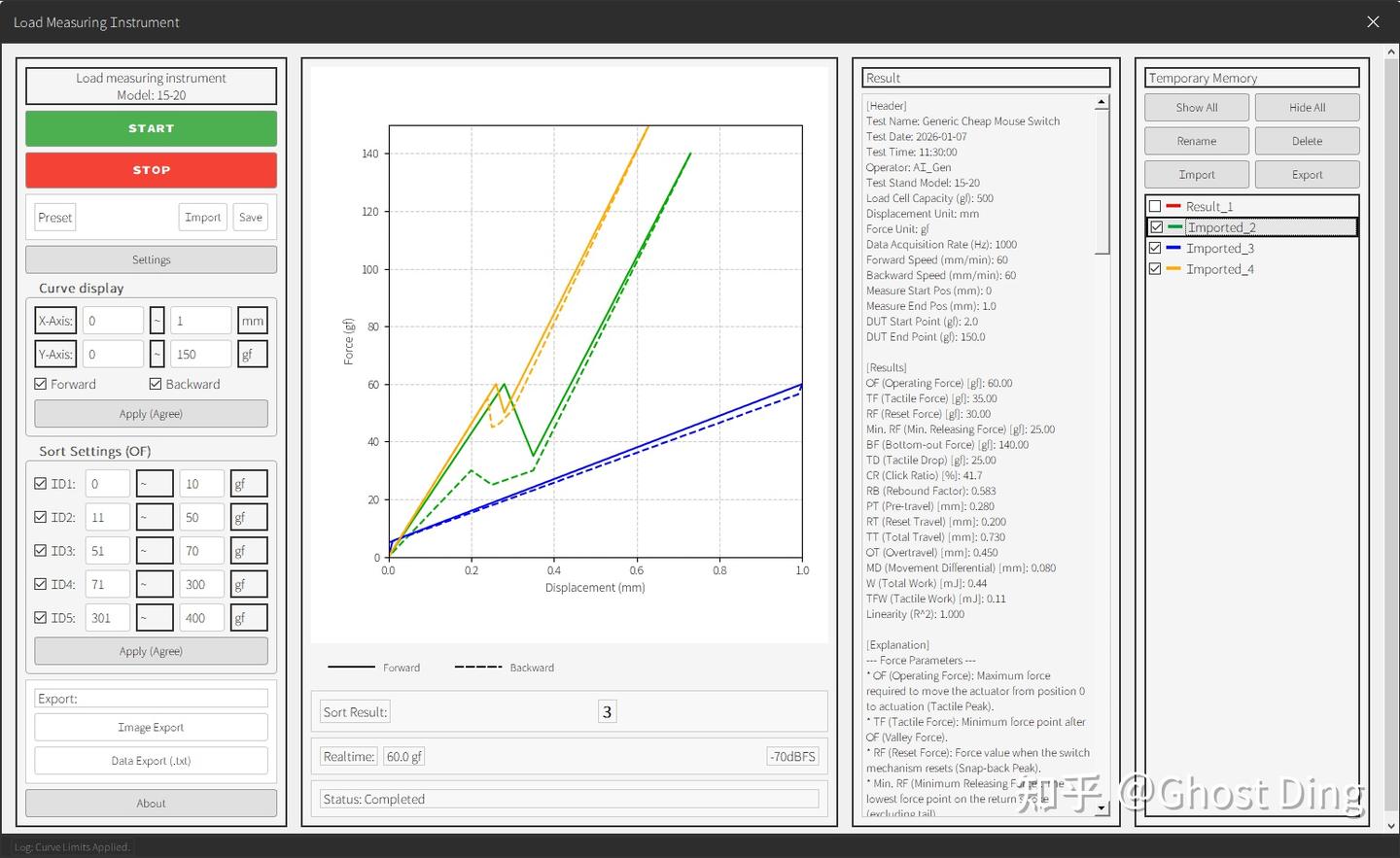
****************************************************
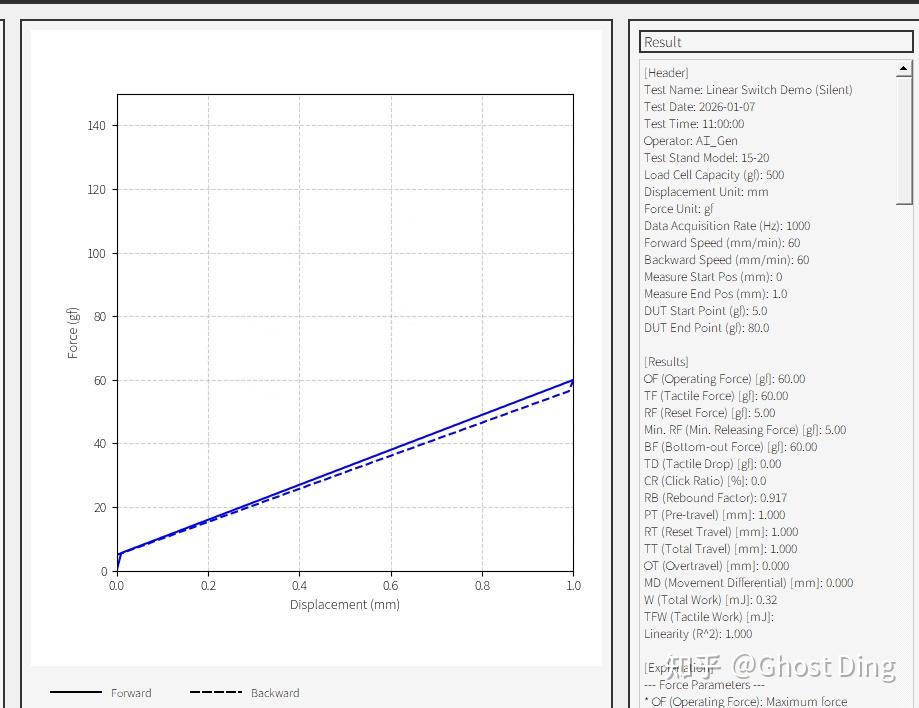
软件仿真,3种常见的开关类型: